http://wrap.warwick.ac.uk/
Original citation:
de Rijke, M. and Kurtonina, Natasha (1996) Bisimulations for temporal logic. University of Warwick. Department of Computer Science. (Department of Computer Science Research Report). (Unpublished) CS-RR-304
Permanent WRAP url:
http://wrap.warwick.ac.uk/60988
Copyright and reuse:
The Warwick Research Archive Portal (WRAP) makes this work by researchers of the University of Warwick available open access under the following conditions. Copyright © and all moral rights to the version of the paper presented here belong to the individual author(s) and/or other copyright owners. To the extent reasonable and practicable the material made available in WRAP has been checked for eligibility before being made available.
Copies of full items can be used for personal research or study, educational, or not-for-profit purposes without prior permission or charge. Provided that the authors, title and full bibliographic details are credited, a hyperlink and/or URL is given for the original metadata page and the content is not changed in any way.
A note on versions:
The version presented in WRAP is the published version or, version of record, and may be cited as it appears here.For more information, please contact the WRAP Team at:
Research
R.port
304
Bisimulations
for
Temporal
Logic
Natasha
Kurtonina, Maarten
de Rijke
RR3O4
We
definebisimulations
for
temporallogic with
Since andUntil.
We
compareour
notion toexisting
notionsof
bisimulations, and we useit
to
develop the basic model theoryof
temporallogic
with
Since andUntil,
which
includes preservation anddefinability results.
We concludewith
a brief discussion of the wider applicability of our ideas.Department of Computer Science
University of Warwick Coventry CV47AL
United Kingdom
Bisimulations
for Temporal
Logic
Natasha
Kurtoninal and
Maarten
de Rijke21 Center
for
Logic, Ghent UniversityRozier 44, 9000 Ghent, Belgium
Natasha. Kurtonina@rug. ac . be
2 Dept. of Computer Science, University of Warwick
Coventry CV4 7AL, England
mdr@dcs . warwick. ac . uk
Abstract
We define bisimulations for temporal logic
with
Since andUntil.
Wecompare our notion to existing notions of bisimulations, and we use
it
to develop the basic model theory of temporal logic with Since and
Un-til,
which includes preservation and definability' results. We concludewith a brief discussion of the wider applicabilitl' of our ideas.
Introduction
The
simplest structures usedto
model dynamic phenomenaare
(labeled)transition
systems: structures equippedwith
a collection of states and oneor
more transition
relationsthat
indicate
how onestate
can evolve intoanother.
Numerous languages have been proposed as suitable descriptiontools
for talking
abouttransition
systems. Process algebrai,c languages takean external view on
transition
systemsin that
each process algebraic termdenotes
an entire transition
system.
Modal and
temporol languages' onthe other hand, offer an internal perspective on
transition
systems' as they describe (local) properties of states and transitions between them.This
paper dealswith
the
model theory of oneparticular 'internal'
de-scription language for transition systems: the temporal language
with
Since andUntil.
This language, and languages closely related toit,
have been pro-posed by a number of authors as suitable for describing dynamic phenomena.For example, Van Benthem [2] suggests
that
we use Since andUntil
to
de-scribe operations of theory change. Also, information change often involvesan 'economy
principle'
sayingthat
one should change aslittle
informationas possible when accommodating new datal languages
with
Since andUntil
(or
Since andUntil-like
operators) are the obvious candidatesif
one wantsto
expressthis
ideaof
minimal
change, and, indeed,in
mostof
the
moreIn
a properly developed theory of dynamics the relation between the modelsof dynamic phenomena on the one hand, and the description language used
to specify such models is a central issue.
In
this paper we analyze the modeltheory of the temporal language
with
since anduntil;
the maintool
in our analysis is a special kind of bisimulations.The
relevanceof
bisimulationsto
dvnamics liesin
the
answer one can giveto
the following question: when do two transition systems represent the same process? Obviously, this depends on the features of transition systemsthat
one findsimportant.
Typically, a minimal requirement isthat
states to be identified have the same choice of actions enabled.But in
the presenceof
Since andUntil
we want more, aswe'll
see belowl among other things,if
an action is enabledin
a state s, then we shouldnot
onlyfind
the sameaction enabled in any state
I
that
we want to identifywith
s,but
we should also ensurethat
the 'interval'or
'period' leading from sto
the result of theaction can be matched by a similar interval
starting
froml.
In
addition there are also more technical reasonsto
workwith
bisimula-tions
in
trying
to
understand the model theoryof
Since andUntil.
Recentwork
in
the model theory of modal languages is characterized by a pervasive use of bisimulations. Van Benthem [2]first
observed the close resemblanceof
bisimulationsto partial
isomorphism.This
observation has inspired asystematic investigation of the model theory of basic poly-modal logic along
the lines of first-order model theory
in
DeRijke
[21], whose results take t]refollowing 'heuristic equation' as
their
starting point:partial isomorphims
_
bisimulations first-order logic modal logicAndr6ka, van Benthem and N6meti [1]
further
explorethe links
betweenmodal logic and first-order logic using bisimulations as
a
centraltool,
and the investigations of Van Benthem, Van Eijck and Stebletsova [4], VanBen-them and
Bergstra[3],
and DeRijke
[20] also revolve aroundthe
use of bisimulationsin
the model theory of modal logic.Most of the results
in
the papers cited above concern only basic modaldiamonds
(a)
and boxes[a]
with
their familiar
truth
definitions,or
simple variations thereof. The model theory of modal and temporal languageswith
more complex operators
isn't
as well developed.In
particular,
in
the
caseof the temporal language
with
Since andUntil,
there is no proper notionof
bisimulation
that
allows for the development ofits
model theoryin
analogywith
basic poly-modal logic; this has been observed by a number of authors (see [3,4,21]). In
this
paper we addressthis
issue by introducing a notion of bisimulationthat
'works' for the temporal languagewith
Since and Until.That
is, we define a notion of bisimulationthat
can serve as a central tool inthe model theory of temporal logic by allowing us to prove basic preservation and definability results.
concepts;
in
Section 3 we introduce a notionof
bisimulationsfor
Since andUntil,
and compareit
to
related equivalence relations on models. Section 4considers the question when temporal equivalence implies
bisimilarity,
and Section 5 then uses bisimulations to to establish basic model-theoretic resultson preservation and definability
for the
temporal languagewith
Since andUntil.
We concludewith
some questions and suggestions forfuture
work.2
Definitions
This
section introducesthe
various conceptsneeded.
First,
,S[/-/ormulasare
built
up
using propositional variablesP,
Q,..
',
the
constantsT
andI,
boolean connectives-,
A, and thebinary
temporal operators ,S (Since)and
[/
(until).
we
useL\u
to
denotethis
language.
we
usethe
usualabbreviations:
F/
=
U(0,T),
G0
:
-F-Q,
PQ=^9(d,
T),
HQ
=
-P-Q.
The
mirror
imageof a
formula is obtainedby
simultaneously replacing ,5by
[/
andU by
S.A
fl.ow of time, temporal order or frame is apair
F
:
(W,<),
where Wis a
non-empty setof
time pointsor
states,and
<
isa binary
relation on W.
A
ualuation is a function assigning a subsetof
W to
every propositionletter.
A
model is apair
(F,v)
whereF
is a frame andv
a valuation.The
satisfact,ionrelation is
definedin
the
familiar
wayfor
the
atomic and boolean cases, while for the temporal connectives weput
M,t
=
S(d,l/) iff
there exists o
(
t
suchthat
M,u
I
@' andfor
all u
with
u<
u
I
t:
M,u
?
IbM,t
=
U(0,',1,
iff
there exists u)
f
suchthat
M,u
I
S, arrdfor
all u
with
u)
u
t
t; M,"
=
rlt.
To
talk
about the points involvedin
interpreting temporal formulas, thenotion
of
an
interval provesuseful.
Let
M :
(W,(,
V)
bea
model.
Aninterual
in
M
is simply a pair of pointsu,u
e
W.
An
interval tou is called a pseudo-interualif
there is noz €
ltrl suchthat
tr.r(
u
andu
1u.
If
tlu
isan interval
,
and$
a temporal formula, thentruth
of/
in
usu byputting
uu= /
ifffor
all u
with
w
<u
(
u
wehaveul
Q.Using
our
notion
of
intervals we canrewrite
the
truth
conditionfor
^9 asu)
=
S(O,rlt)
itrthere
exists u<
w
with
trI
@ anduu
?
1r.The temporal theory of a point ur is
the
set tp(ut):
{Qe
Lsu
|*
=
O},and
the
temporal theory an interval u.ru is the set tpQuu):
{6
e
L511 |uu
I
il.
If
wewant
to
emphasize t]ne modelM
in
which
u.'(or
tr.ru) lives, wewrite
tpla(uj)
(or
tpla@u)).
observethat
if uu
is
a pseudo-interval, thenlrj
u
are temporally equiualentif
tpQu):
tp(u)
(notationu:
u);
temporal equivalence for intervals is defined analogously.Let
Lt
be the first-order languagewith
unary predicate symbolscorrespond-ing
to
the proposition lettersin
Lsry, andwith
one binary relation symbol{.
Lr
is called the correspondence language for LsLr.f1(r)
denotes the setof
all
41-formulas having one free variabler.
Models can be viewed as ,c1-structures
in
the
usualfirst-order
sense.The standard translation takes temporal formulas @
into
equivalentformu-las
57(/)
in
the
correspondence language.It
maps proposition letters ponto unary predicate symbols
Pn,
it
commuteswith
the booleans, and thetemporal case is
Sr(S@,l1,))
:
la
fu<
r
n
Sr@)(y)
nVz (y<,
<
r
-+
Srk!)@D.
For
all
modelsM
and pointsI
we haveM,t
=
0
itr
M +
Sf
@)ltl,
wherethe
latter
denotes first-order satisfactionof
Sr(fi
under the assignmentof
f
to
the free variable ofST($.
3
Bisimulations
for
^9
and U
In
this
section we introduce our notion of bisimulationfor
Since andUntil,
and compare
it
to
related equivalence relations on models; our findings are summarizedin
a diagramat
the end of the section (Figure 6).To define bisimulations
that
work for temporal logic, wewill
use relationsthat
link
pointsto
points and intervalsto
intervals.Definition
3.1 (Bisimulations)
Let
M1:
(Wr,
<r,
7r)
and M2:
(Wz,lz,Vz)
be two models. A non-empty relationZ
C
(WrrWz)U(W?
xW])
isa relation of bi,simulati,on
if
zn(wrrwz) *
A, and in addition the following holdl.
If r1Zr2
then 11 and 12 satisfy the same proposition letters.2.
If
r1Zr2
andUr
1r
21, then
there exists y2in M2 with
UzKz
rz,
AtZAz and
gpyZy2r2.
3.
If
y1r1Z!2r2
andat
1r
zr
1r
11,then
there exists z2with
Uz{z
z2 12:x2 and z1Zz2.
4.
Clauses2
and 3with
)1
(and)2)
insteadof <1
(and <2).5.
Clauses 2, 3 and 4 going from M2to
M1.If
there is a relation of bisimulation between o1 and 12, then we saythat
11and 12 are bis'imilar (notation 11
I
12), and similarly for intervals y111 andy2r2.
rf
necessary, the modelsin
which rr1and
r.2livewill
also be includedIn
the semantics of dynamic formalisms both states and transitions play animportant
role; the semantics of Since andUntil
may seemto
suggest that the transitions only have a secondary roleto
play
in
determining thetruth
valueof
a
formula involving Since andUntil.
Our
notion of
bisimulation, however, clearly showsthat
both
propertiesof
states andof
intervals areimportant.
It
is
easily verifiedthat arbitrary
unionsof
bisimulation relations are again bisimulations, andthat
u
is the maximal bisimulation and an equiv-alence relation.Irr
Section 5 we showthat
a first-order formulain
the
correspondence lan-guageLsry
is equivalentto
a temporal formulawith
Since andUntil iff it
is
invariant for the
notion of bisimulation definedin
Definition
3.1' In
the remainder ofthe
present section we compareour
notion of bisimulation to closely related equivalence relations on models. Such comparisons can take placeat
two
levels: one can compareparticular
instancesof
bisimulationrelations,
but at
a more abstract level one can also compare the equivalence classes of models modulo the various notions ofbisimilarity'
Our goal in comparing these equivalence relations is
to
locate our notionin the wider landscape of such relations, and show
that
our notion ofbisim-ulation is the weakest one
that
allows for a direct development of the modeltheory of since and
Until
without
a detour through richer languages.Modal
Bisimulations
We
start
with
bisimulationsfor
standardmodal
languages,often
calledstrong bisimulations
in
the
computationalliterature
(see[13]).
These aredefined
by
clause 1of
Definition
3.1 togetherwith
clause2
with
the
lastconjunct (,and
gp1za2r2')
left
out.
strong bisimulations are much weakerthan our bisimulations: they
don't
take the 'past' of nodes into account' Anobvious way of taking the past
into
account is by extending the language soas to include the familiar forward looking
modality
F
and backward lookingmodality
P.
The corresponding notion of bisimulation is defined as follows.Let M1,
M2be
two models; a non-empty relationZ
e
WtxW2is
a relation of F,P-bi,si,mulation ifit
satisfies condition 1 of Definition 3.1 and a trimmeddown version
of its
condition2
in
which referencesto
intervals have been deleted:2'.
If
r1Zr2
andh
<tr1,
then there exists 92in
M2with
92 12 12 and YtZaz,and a similar condition
with
)t
instead of(r,
and going from M2 toM1.
Wewrite
11?
rr,prz
to
denotethat
there existsa
F'P-bisimulation
between iD1 and12.
cLearly,r1
I
12 impliesrt
?
p,p12'
b:ut the converse need noto
1! ^o
'M1"M,
Here we have M1
t)
p,p Mz via the relation indicatedwith
dotted lines; butMr
fr
M2,
because any candidate bisimulationz
shouldlink
1to
both
2and 3; so
it
would followthat
lrz2B,
and by the definition of bisimulations, there would be state z between2
and 3-
a contradiction.All
in
all, then, we have the following.Proposition
3.22.
F,
P-bisi,milari,ty doesnot imply
bi,simitarity.Z-bisimulations
Next
we consider so-calledZ-bisimulations.
These were definedby
vanBenthem,
van
Eijck and stebletsova [4,Definition
4.2] as candidatebisim-ulations for temporal logic.
A
relationZ CW1 xW2is
al,l-bisimulati,onif
it
satisfies clause 1 of Definition 3.1, clause 2/ above, and3'. if r1Zr2, Tt 1
At, 121
Az, atZA2, and 11I
z1(
y1, then there exists a z2in
W2 suchthat
12<
z2<
A2 and z1Z 22,as well as similar conditions
with
)
instead of<,
and going from M2 to M1.we
userr
!)u
12to
denotethat
there exists a /,/-bisimulation between 11and 12.
It
is
easily verifiedthat
M1,u Qu
M2,u
imLpliesMy,w
?
M2,ui
anyZ/-bisimulation can be extended
to
a
bisimulationin
our
sense.Let
z
be aZ-bisimulation,
and defineZ'
by
g1r1Zy2r2ltr
A,
<
rt,
g2I
12, y1Zy2 andr1zr2
all hold. Put
Y
::
z
l)
zt.
Then
Y
is a
bisimulationin
our sense.By
way of example,let
us check clause 3of
Definition3.1.
Assumey1r1Yy2r2
ald
gr
I 4r;
we needto
find
a z2in
between!2
and. 12with
z1Yz2.
By
definition we have AtZAz, Ut1rt,
ArZAz, arrdr1Zr2.
So, asZ
was a L/-bisimulation there exists z2
with
AzI
zz(
12 and z1Zz2, and we [image:8.595.188.373.125.187.2]are done.
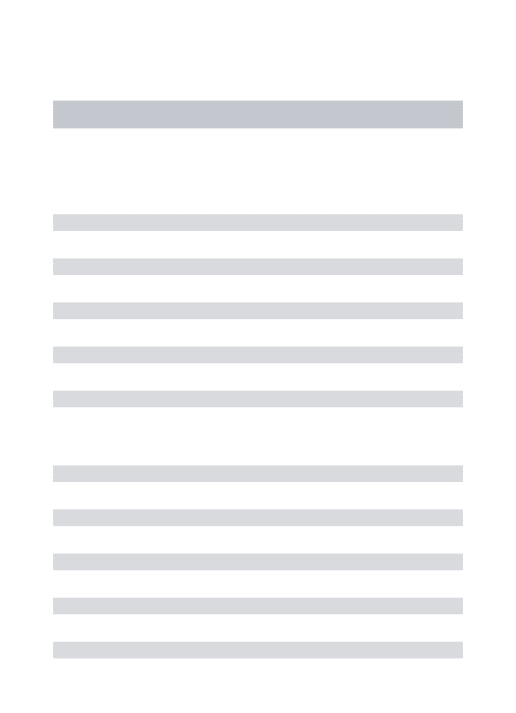
Figure 1 below depicts a bisimulation in our sense (indicated
with
dottedlines),
that
is
not
a L/-bisimulation.
Here,My
:
(N,{,V),
whereV
isarbitrary,
and<
isthe
usual less-thanrelationi
Mz:
(N,<,V),
whereV
and
<
are asin
M1.Define a relation
Z
c
A{2 U(N
x
N)
Uyputting
Z ::
{(n,n')l"e
N}U{(rr,(n+1)/)
Ine
N}u
M1
Mz a
[image:9.595.118.427.132.226.2]ll
Figure 1:
A
bisimulation which isnot
ail-bisimulation
We leave
it
to
the
readerto
checkthat
Z
: M1,0
I
M2,0''
Now,to
seethat
Z:
M1,0
tru
Mz,0/,
observethat
becauseof
1(
3, 1<2 <3,
122',and.
223t,
for
z
to
be a u-bisimulation
we shouldbe
ablefind a z
with
2t
<
z<
3/ and 2Zz-
and there is no such point.Proposition
3.3
1.
B-bisi'milari'ty i'mplies bisimi'larity'2.
Bisimitarity
d,oes notimplyl.l-bisi,milarity.
(cf.
Propos'ition 3.6 below.)B-bisirnulations
Van
Benthem, VanEijck
and
Stebletsova [4] also consideran
alternativenotion,
calledfi-bisimulation,
which relatespoints
to
points and pairs of pointsto
pairs of points, much likeour notion of
bisimulation;the
notionof
B-bisimulationis
usedto
analyzea
two-dimensional counterpartof
the language of temporal logicwith
,9 and[/.
To be precise, a relationz 9
(wrx
W)
U (W?"
W])
is a B-bi,si,rnulationif
it
satisfies clause 1 of Definition 3.1and
2tt
.
if
r1Zr2
and. 11(
gr1, then there exists y2 withrz
I
Uz and r1y1Zr2y23'l. if
r1y1Zr2y2, ttrenr1Zr2
and yvZy24tt.
lf
ryy1Zr2y2 andlr1 z-21z-y1,
then there exists 22wrth:r2<
22 <A2and
both ryz1Zr2z2
and z1Y1Zz2Y2,and similar conditions
with
)
insteadof
<,
and going fromMz to M1.
We userl 9s
rz
to
denotethat
there exists ar-bisimulation
betweenf1
and12.
Yan Benthem,van trijck
and stebletsova [4' Proposition 4.8] showthat
rt ?u
12 impliesrr t)s
r2i
ar'ly /,/-bisimulation can be extendedto
a
6-bisimulation.
What
about the relation betweenlJ
andI
s?
It
is clearthat
any B-bisimulation is a bisimulation
in
our sense. To seethat
the converse doesn't hold, Iook at Figure 1 again,but
redefine the relations in the modelsto
arriveat
the picturein
Figure2.
That
is, defineMt
:
(N,/?r'V),
whereUI'234
O--O--O-+O-O-M2
O_---'-_O+a-O+O-.'.
0t
7t
2'
3t
4lF igure
2:
A
bisimulation which isnot
a B-bisimulation7
is arbitrary, andRlnm
iff
m:
n*
I;
andM2:
(N, fi2,V),
whereZ
andR2 are as
in
M1.Define a relation
Z
CN
U(N
x
N)
tV
putting
Z ::
{(n,r')l"e
N}u{(r,(n+1),)
Ine
N}u
{(nn +
l,m'
(m+
1)')
| n,rn
e
N}.We leave
it
to the reader to check thatZ
:M1,0
?
Mz,O'. Now, to see thatZ:
M1,0
/)s
M2,0',
observethat
if
Z:
(01)
ur
(5,6,)
wereto
hold, wewould also have
Z:0
Q6
5/, which isnot
the case.The
above observations canbe
strengthened:there
are modelsthat
arebisimilar
in
our
sense,but not
B-bisimilar
(and hence,not
z-bisimilar
ei-ther).
Hereis
anexample.
Forthe
purposesof this
example wewill
de-fine
a
new, unary modal operator3-step,
and provethat
it
is
preservedunder B-bisimulationsl we
will
then displaytwo
modelsM1
andM2
that
are
bisimilar
in
our sense,but that
don't
agree on a formula involving the3-step -operator; hence,
M1
andM2
cartnot be 6-bisimilar.We need some preliminary
definitions.
First
of
all, let
M
:
(W,<,V)
be a model, s,
t
€ W,
and s<
t.
Then(sf)
is calleda
locally linear cha'inif
the following condition is satisfied:if
s(
u11t
and s<u2 < f
then(
is transitive on{s,t,uy,u2}
and s< ur <
u21 tor
s(
u2I
uyI
t.Next,
we callM
a
locally I'inear modelif
for
everys,
t
€W
we have thats
(
t
impliesthat
(st)
is locally linear chain. The length of an interval (s t)is the largest
n
suchthat
there exist u6,...,un
with
s:
z0(
...
1ur:7
(if
suchn
exists). Call a structure d'iscreteif
every intervalin
the structure hasfinite
length.Claim
3.4
LetMr, Mz
be two discrete, locally linear models. Assume thats,te W1,r,a€Wz,
andboth
s
(f andrly.
If
(st)
and(ry)
areB-bisimilar,
then(st)
and(ry)
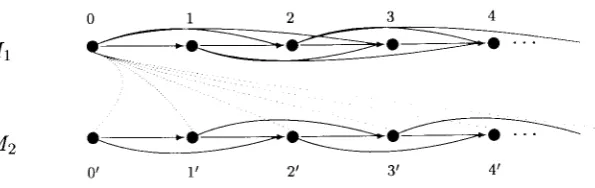
haue the same length.Mt
[image:11.595.125.423.132.226.2]M2
Figure
3: Bisimilar
modelsbut
not U-bisimilarProof.
Use induction on the lengthof
(st).
-1Let
us define our new operator3-step
now:s
f
3-step/
iffthere
is a locally linear chain s<ur
<uz
1b
with
bf /'
Claim 3.5
Formulas inuoluing the}-step
-operator are preserued underB-bisimulations between discrete, locally linear models.
Proof
.
Let
M1
andM2
bebisimilar
models, sayZ
: stl
r,
wheres
€
M1and
z € Mz.
Supposes
I
3-step6;
we needr p
3-step/.
Then there isa locally
finite
chains
7\u1<u2
< I
suchthat
I
I
@. Since ,s1t
andszr
there exists
y
suchthat
r (
y
and
(st)Z(ry)
andtZg.
Soy
I /'
ftom
claim
3.4 we getthat
(st)
and(ry)have
the
samelength.
It
follows that there isa
local chainr
<
4
<
zzI
A, and because A=
4!,it
followsthat
r I
3-step
@, asrequired.
-lNext,
consider the modelsM1
andMz
in
Figure3. That
is,both
haveN
astheir
domain, andin M1
therelation
(1
is givenby
{(t,
n
+
i)
|i
e{1,2,3}}.
ln
M2 the relation(2
is given by{(r,
n+I) li
e
{1'2}}'
Choose valuations suchthat
all
proposition letters aretrue in all
states.Then, the models
My
arrdM2
are bisimilarin
our sense: use the relationZ
that links all pointsin
Ml
to
all pointsin
M2, andit
shouldlink
minimal intervals (i.e.,of
length0)
in
Mr
to
minimal
intervalsin
M2, andall
non-minimal
intervalsin
Ml
shouldbe
Iinkedto all
non-minimal intervals inM2.
We leaveit
to
the
readerto
checkthat this
does indeed establish abisimulation between
Mt
and Mz.Finally, we show
that
there cannot be a B-bisimulation betweenM1
andMz
that
links 0to 0/.
observethat
My\
F
3-stepp
(for allp),
but
in. M2there are no locally linear chains
of
length 2, hence Mz,O'f
3-stepp'
By Claim 3.5it
followsthat
Mt
andM2
arenot 6-bisimilar'
Proposition
3.6
1.
B-bi,similarity i'm'pli'es bisirni'larityac
l"
Mtl
_ia7'o
I
a,
J/'
t2
c
Mz
o
}
,i
[image:12.595.183.421.128.242.2]a
Figure
4:
S-similarbut not
bisimilar,S-bisimulations
Sturm
[22] definesa
notion
of
bisimulation, called ,9-simulation,for
theforward
looking fragmentof our
temporal language asfollows. Let
M1,M2
be
two
models;a
non-emptyrelation
Z
C
Wr
x
W2is a
relation
of S-simulationif
it
satisfies condition 1 of Definition 3.1 as well aso
If
rtZrz
and11
(
y1,then
there exists 92in M2 with
y1Zy2
andrz
{
Az suchthat
for every z2in
M2with
12{
z2 1. y2 there exists z1in
Ml
with
:r1<
zr
<
y1 and z1Zz2.o A
similar clause going from M2to
M1.Observe
that
S-simulations only 'look forward'; they don't take the converse>
of
<
into
account. Sturm
122, Lemma2.II.76)
showsthat all
forward Iooking temporal formulas(that is:
formulaswithout
occurrences of Since) are preserved under,S-similarity.Clearly,
bisimilarity
in
our sense implies ^9-similarity. For the converseimplication, consider the two models in Figure
4. That
is: My:
({0,1,2,3},
{(0,1),
(0,2), (1,2),
(0,3)},
y1)
andM2:
({o,b,c,d}, {(o,b),
(a,c), (a,d)},
72)
whereVr
and
V2 are suchthat all
propositionletters
aretrue at
allstates of
both
models. FurthermorE,Z
:
{(0, o),(1,c),(2,b),(2,d),
(3, b)}.Then
Z
:M1,0
9s
Mz,a.
On the other hand, there can't be a bisimulationin our
sense betweenM1
and M2that
links 0 and a; observe,for
example,that
0
=
FFPFFT
while
af
FFPFI'T,
henceby
Lemma 3.10M1,0
tr
Mz,a.To
be fair, though, we should compare,S-similarity to forward looki,ngbisimulations only
-
after all, S-simulationsonly
'lookforward.'
So, definea
forward
bi,simulationto
be
a
relation
Z
between modelsthat
satisfies clauses 1, 2, and 3 of Definition 3.1, going from the one modelto
the other,and vice
versa.
Wewill
now showthat
thereis
no forward bisimulationlinking
the states 0in
Ml
anda in M2 in
Figure 4;this
will
establish thatS-similarity
is weakerthan
(forward) bisimilarity.To see
that
0 and 1can't
be forwardbisimilar,
argue as follows. Define a newbinary
modal operatorafter
({,
,lt) bVu p
after
(d,rh)
itr)uu(ra
1u 1u
Aw
1u
Au
=
dn"l
rD.(This operator is related to a number of operators in the literature, including
dynamic composition, Lambek and arrow logic product, and Venema's
chop-operator [23].)
We leave
it
as an exerciseto
showthat
formulaswith
this
new operatorare preserved
by
forward bisimilarity
as definedabove.
Observe, finally,that
M1,0
f
after(T,T)
b:utM2,af
aftet
(T,T).
Hence 0 ando
can't be forward bisimilar.Proposition
3.7
1.
(Forward looki,ng) bisi,milarity i,mpli,es S-similarity.2.
S-simi,tarity doesnot imply
(forward) bisimilarity.To conclude our discussion of ,S-similarity we want to emphasize the
fol-lowing. ,S-similarity pleserves
truth
of (forward looking) temporal formulas, andby the
above counterexampleit
is weakerthan
our notion ofbisimula-tion (at
least when weonly
consider the forward lookingpart).
This
may seemto
be a
reasonto
preferS-similarity
overoul
notion
of
bisimilarity,especially since
our
bisimulations involveboth
points
and intervals, whiletemporal formulas are evaluated
at
pointsonly.
However, as wewill
show below,it
is precisely this special two-sorted character of our notion ofbisim-ulation
that
allows usto
developthe
modeltheory of
Since andUntil in
adirect way
(without
detours through richer languages); ,9-simulations don'thave
this
feature.And
thus, S-simulations seemto
be too weak.3-Back-and-forth
Equivalence
The following notion of an equivalence relation on models is taken from Van
Benthem
[2]. First,
a partr,al isomorphism fromM1
to
M2 is apartial
map 0 : W1-+
Wz suchthat
o for all
proposition lettersp
andall
statesu,
w
€ fi(p)
rfr
f
(.t)
e Vz(p),o
for all
states u)r,'trr€
l7r
andall
quantifier-free formulasa(r,y)
in
I
and
:
we haveMr
I
afuapl)
itrMz
F
a[/(trr)/(ur)].
Next, a n-baclc-and-forth system
("
5 ,r)
ftom M1to
M2 is a non-empty setC of
partial
isomorphisms fromMr
to Mz
suchthat
l.
if
0€
Cthen
ldom(O)l<
n2. if
0 € C then anv restriction of 0to
a subset ofits
domain is also in CM1 M2
[image:14.595.164.428.131.220.2]/\
Figure
5:
Bisimilarbut
not 3-back-and-forth-equivalent.3. if
0€C,u
€
W1\
dorn(0) andldom(O)l< o,thenthereexists
0+inC
with
{tu}
u
dom(0)c
dom(O+)4. if
0 Q C, u€
I4l2\
rng(0)
and ldorn(O)l<
o,
then there exists g+in
Cwith {u}
u rns(0)
c
rns(0+).Let
tue
M1
and u€
Mz
be tuples of equallength.
The structures (M1,ru)and (M2, u) are n-back-and-forth equiualent if there exists a rc-back-and-forth system C from M1
to
M2
containing a mapI
such that0(A):
u; notationC :
M1-n
Mz.Van Benthem [2] shows that a first-order formula (in
(, :)
can be writtenwith
at most 3 variablesiffit
is invariant under 3-back-and-forth equivalence. The relevance of this result for temporal logic isthat
temporal formulaswith
Since and
Until
can be translatedinto
the
3-variable fragmentof
41,
thefirst-order correspondence language.
Clearly,
Mt,w
-z
M2,o
impliesMt,,tx
-
Mz,u
for
all
-
€
{?y,
t)6,
tl,
u.s,
I
r,pj,
but
none of the converse implications holds, as is witnessedby the example
in
Figure 5.We leave
it
to
the
readerto
checkthat M1
Qu
Mz,u via
the
dottedlines (and from
this
the other
bisimilaritiesfollow).
However,the
single 'endpoint' in
Ml
satisfies the 3-variable statement)y1z(y*zAA<rAz<r)
which is
not
satisfied by any nodein
M2, soMy
andM2
can not be3-back-and-forth equivalent.
Proposition
3.8
1.
3-Back-and-forth equ'iualence i,mplies bisimilari,ty.2. Bisimilarity
does not imply 3-back-and-forth equiualence.Temporal
Equivalence
Finally, we compare temporal equivalence
to
bisimilarity.1l)
.\
/
o
I a
1
a
Proposition
3.9
If
Q cannot disti,nguish between bi,si,milar po'ints, thenit
cannot di,stingui,sh between bi'similar interuals.
Proof
.
Assume,pt |
@ and w1u1?
ru2u2. We haveto
showthat
u2u2=
d.
So choose u2 such that w2<u2 <
u2. We needto
showthat
u2l
Q' Asrxpl
9
w2u2,there exists u1 suchthat
tr.r1luv
(u1
andur
u
u2'
Thenut
|
6,
so by the assumption on/
we have u2| $.
-lLemma 3.10
ryMt
:
(Wr,--t,V1)
andMz
:
(Wz,1z,V2)
are two models,and,
11
e
Wr,
12€
W2, are suchthat
rv
!)
12,
then 11=
12' In
otherwords: bisimi,Iarity i'mplies temporal
equiualence-Proof
.
We argue by induction on the structure of formulas. The atomic and boolean cases are easy. Solet
us consider the temporal case. Assume ur1!
5(6,1,,
andtr1
t)
uz.
We needto
showthat
uz
=
S(O,r/).
Bv
definitionthere exists a o1 such
that
(i)
u11w1, (ii)
u1I
@, and(iii)
u1u.'1I
r/'
From(i)
andur
I
u2
we obtain a u2 suchthat (iv)
u21ru2,
(t)
"
tl
u2' and(vi)
u1u.r19
u2w2.By
the inductive hypothesis.(v)
and(ii)
we get u2|
Q'FYom the inductive hypothesis, Proposition 3.9,
(iii)
and(vi)
it
follows that uzuz?
,b. BV(iv) this
impliesuz
ts S(d,rb), asrequired.
-1The converse of the implication proved
in
Lemma 3.10 ('Does temporal equivalence imlpybisimilarity?')
will
be examinedin
Section 4 below.Qu
us
_.,/,1
l\
*/,=
[image:15.595.201.379.443.539.2]-'\ll/ \
?6
?
F,PFigure
6:
The findings ofthis
section'summarizing
the
findingsof this
section, wearrive
at
the
diagram of inclusions depictedin
Figure6,
wherean
allow
-
-+
!
denotesthat
--bisimilarity
implies=-bisimilarity.
The upward arrow markedwith
aques-tion
mark represents an open problem dueto
Van Benthem, Van Eijck and Stebletsova [4, Open Problem 4.7].4
Flennessy-Milner
classes
In
this
section we considerthe
converseof
Lemma3.10:
when doestem-poral
equivalenceimply
bisimilarity?
Usinga
standard examplefrom
theliterature
on modal logic,it
is easily seenthat this
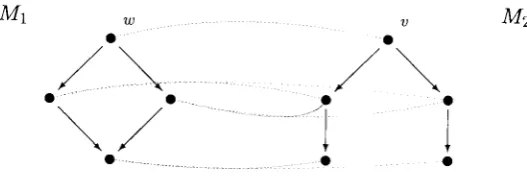
is not the case in general'M1
M2Figure 7: Equivalent
but not
bisimilar.The two models in Figure 7 satisfy the same temporal formulas in their root nodes,
but
there is no bisimulation linking the tworoot
nodes.To get
a
handleon
situations where temporal equivalence does imply bisimilarity, we need the following definition.Definition 4.1
(Hennessy-Milner
classes)A
class K of models is called a Hennessy-Milner classif
for M1, Mz€
K, andall
u.'1e
Mt
and w2e
M2, tuQ
uiff
w:
u. That
is,if
temporal equivalence is a bisimulation betweenM1
and M2.we
saythat
a modelM
has the Hennessy-Milner property whenever the class{M}
has the Hennessy-Milner property.For the standard modal language
with
o
and!
the above notion is dueto
Goldblatt
[12] and Hollenberg[16].
The standard exampleof
a
modal Hennessy-Milner classin
which modal equivalence and modalbisimilarity
coincide, is the class of
all
image-finite models-
modelsfor
which the set of <-successors isfinite
for anypoint in
the model.It
turnsout
that
a natural wayto
determine whether a class of models is a Hennessy-Milner class involves the concept of temporal saturation. LetA
Cnn @ denotethat
4
is afinite
subset of @.Definition
4.2
Let
M
:
(w,
<,I/)
be amodel.
M
is called t_saturatedif
it
satisfies the following conditions:If
V4
C6,, @VJ-C6V-u
eW
(u(
u
and, F
AA
anduu
| /1f)
then
lu
€W
(u(
r.u and uF
n
@ and uu)=
fif);
and
If Vf C6V)u
e
W (u<
u
<tu
and"
F
n
f)
then
lz
eW
(u<u
<
u
and"*
AV).(And
similarly,with
)
insteadof
<.)
we
use T-SATto
denote the class ofall
t-saturated models.The notion
of
m-saturation consideredin
the literature
on modal logic arisesif
oneonly
takesthe first
condition
for
)
in
the
definition
of
t-saturation,with
f :
0
(see [10, 12, 16])Theorem 4.3
T-SAT 'is a Hennessy-Milner class.Proof.
Assume that M1,M2
arein
T-SAT, andthat
u1 €
M1,u2 € M2
are suchthat
wI
:
u2.
we will
showthat
wt
Q
u2
by
showingthat
=
is
abisimulation.
The
first
clausein
the
definitionof a
bisimulationis
trivially
satisfied.For
the
second one, assume uJr:
u2
and u1I
w1.
We needto
find a
u2such
that
u2I
w2, 't)r:
1J2 and u1tu1:
't)2'tr2. ConsiderA
Cnntpmt(ut)
and
f
96ntp(uyta1). Then
u.r1F
S(A^,n
f),
and
so, as ?r1:'t'n2)
wehave
w2
F
S(A
A,Af).
Thus,
there existsu
in
M2
suchthat
u
1w2,
,
F
n
4,
and,*, ?
Af.
Bv
t-saturation there must be a u2(
ti.r2 suchthat u2
|
Atpvr(u1)
and
u2w2=
tp7,1r(u1u1).
But
then o1
=
u2
and't)t'u)t
:
'U2't1)2, ZS reqUired.For the third
clausein
the
definition
of a
bisimulation,
assumethat
u1
1
u1
I
wrt
and u1tl1:
l)2u)2. We needto find
a
u2 suchthat
uzI
u2
1w2
and
u1=
u2.
Considerl-
Cnntpur(ur)'
Then
t'1ttr1f -Af
,and so
u2u2v
-n f.
This
impliesthat
there existsaz
in
M2
suchthat
u2
< u
I
1t2 andu
F
n
i-.
Applying the second clausein
the definition oft-saturation,
wefind
a u2in
M2 suchthat
o2<
u2<
u2
a\d
u1:
u2, 3"\d we aredone.
--lProposition
4.4
LetM
be a fi,nite model, thenit
is
t-saturated'Proof. consider
setof
formulas @ andu
suchthat for
all
4
C6,, @ andf
Cnr,I
there exists a u suchthat
u:-tuanduFn^andutrFnl.
(1)suppose
that
thereis
nou
suchthat
(1)
holdsfor all
of
@ and u7. Then,for
everyu
I
u,there
find
either a Q,€@
with u
F
0"
or
atf;,
€
f
with
uu V
rLu. AsM
isfinite
we can collect these formulas together infinite
setsAenn@,f
C6,,f
(whereAUf l0)for
which(1)
doesnothold-a
contradiction!
By similar
arguments one can showthat
M
satisfies the remainingcon-ditions
in
Definition4.2. I
We need
the
following formof
saturationfrom
first-orderlogic'
Recallfirst
that
M1 is an
elementary ertens'ionof M2
1fwr )
w2
andfor
all,C1-formulas
a(r1,
...,rn)
andall
tuples u)rt-.',
tn,
of M2,Mt
I
a(rr,.
. .,r,)lrur,...
,w,f
itrMz
?
o(rr,.
. .,rr)lwr,
"'
,un]'
We
write Mz
I
M1in this
case.Let
rc be a cardinal number.A
modelM
is
n-saturatedin
the
sense of first-order logic if whenever @ is a set of formulas in aL\(r)-formulas,
where4', extends
/1
by the addition of fewer then rc many individual constants, and@ is
finitely
satisfiablein
an f/r-expansion ofM,
then @ itself is satisfiablein
this
expansion.To show that
M
is t-saturatedit
suffices to showthat
M
is 3-saturated. Below wewill
need the stronger assumption of c..'-saturation.Proposition 4.5
LetM
be an u-saturated model, then i,tis
t-saturated.One can construe cu-saturated models as ultrapowers over a special kind of
ultrafilters.
We assumethat
the reader isfamiliar
with
the definition of ultraproducts and ultrapowers of models (consult Hodges [14]if
necessary).An ultrafilter
is called u-'incompleteif
it
is not closed under countable inter-sections. As a result,if
[/
is an cu-incompleteultrafilter
andM
is a model,then the ultrapower
lI,
M
is an c..r-saturated elementary extension ofM.
Theorem 4.6
LetMt,
Mz
be two models, and let,uJr,u2
be elements olMt,
M2,
respectiuely.If
w1=
w2 thenMy
andM2
haue bisimi,Iar ultrapowers.Proof. The
proof is similarto
the
proofof
[21. Theorem5.7].
We confine ourselvesto
a sketch of theproof. Let
1 be aninfinite
index set; by Chang and Keisler [7, Proposition 4.3.5] there is an c.r-incompleteultrafilter
[/
overI.
By our
previous remarks the ultrapowersfly(M1,trr)
::
(Ml,w|)
andlIu(Mr,rr) :t (Ml,r)
are a-r-saturated.Observe
that
tpy,(-'t)
:
tpprl@z)
:
tpMr(wr).
Hence,Ml,u',
=
Ml,.L;
asM|trlr
andMi,-L
are c,.r-saturated,it
followsthat
Ml,wl
?
M2,u'2, as
required.
-1Thus, temporal equivalence implies
that
there exist bisimilarultrapow-ers.
Hennessy-Milner classes can be characterizedin
termsof a
strongerconnection between temporal equivalence
and bisimilar ultrapowers.
We need two lemmasto
arriveat
this characterization.Lemma
4.7
LetI
be an ,inder set, andU
an ultrafi,lter ouerI.
Then1.
If Mi,wi
Q
N6,ui holdsfor
alli
e
I,
thenllu(Mo,.n)
I
lIu(Nrro).
2.
If
M,w
!)
N,u,
thenllu(M,rx)
?
flu(N,
r).
Proof.
We only prove thefirst item.
For eachi
e
I,let
Zibe
a bisimulationlinking
Mi
and
Ni: Zi :
Mi,u)i
Q
Ni,ui.
Definea
relation
Z
betweenpoints
of
llr(Mi,ur;)
and
fly(l/,,u;),
andpairs
of
pointsof
flr(Mi,w)
and
flu(N,,u;)
in
the obvious way byputting
r1Zr2
iff
{i
e
I
Ir1Q)Zir2(i)} e
t/,
andr1y1Zr2y2
iff
{i
e
I
|"r(i)ar(i)Zir2(i)y2(i)}
eU
We
claim
that this
is a bisimulation.
First of all,
it
is
clearly non-empty(take 11 '.
i
t+
wi,
and 12 : 'ir+
uil
tlnenryZr).
Next,
if
r
in
lIu(M',wt)
hasr !
p
andrZy,
then, by the definition ofultraproducts
{ze
/
|z(i)
eV(p)j
€
[/.
AsrZy
this impliesX
,:
{i
e
I
Ir(i)
e
V(p)
andr(i)ZiyQ)}
e
u.Aseach
Ziisabisimulationit
followsthat
X
C
{i
e
t la0
e V@)},
hencethe
latter
set isin
[/,
from which we get A tsp,
as required'The remaining clauses may be proved by
similar
arguments.
-lLemma 4.8 Let
K
bea
Hennessy-M'ilner class, andM1,
Mz
€
K.
LetLt)7,
'tr2
be elementsof M1, M2,
respectiuely, suchthat
u1
: u2.
ThenTlu(Mt,'ui)
tl
llu(Mr,u2)
for
all
inder
setsI
and ultrafiltersU
ouerI.
Proof. By
Lemma 4.7 we haveboth
Mr,ur
I
llu(Mr,
tr1)
andM2,u2
?
llu(Mz,.r).
As
Mr
andM2 live
in
a
Hennessy-Milner class, M1,wr
=
Mz,wz
impliesMr,wr
ti
Mz,tr2,
hencellu(Mr,tr-ll)
u llu(Mz,wz).
-1Corollary 4.9
Let
K
bea
classof
models. ThenK is
a
Hennessy-M'ilner classiff
the Jollowing are equiualentfor all
models M1,M2
€K:
1. Mt,U)t
i
Mz,uz
2.
all
ultrapowers of Mt.,tJry andMz,wz
are bis'imilar.For the standard modal language
with
o
and D, Marco Hollenberg hascharacterized the
marimal
Hennessy-Milner classes in terms of submodels of canonical models. No such characterization has been obtained forHennessy-Milner
classesfor
the
temporal languagewith
Since andUntil; in
fact,
it
is not
always clear whether canonical modelsfor
Sinceand
Until
form
aHennessy-Milner
class.
For
example,the
lack
of a
uniform definition
of an accessibility relationin
the completeness proofs for logicswith
Since andUntil
due to Burgess [6] andXu
[2a] makesit
hard to determine whether theircanonical models form a Hennessy-Milner class. On the other hand,
it
is easyto see
that
the canonical models defined by Gabbay and Hodkinson [11] usingthe so-called
irreflexivity
rule do form a Hennessy-Milner class.5
Applications
to
temporal model theory
In
this
section we apply the tools developedin
Sections 3 and 4to
arrive atmodel-theoretic results
for
temporal logic on preservation and definability'We give quick proofs of definability, separation, and interpolation theorems, as well as a preservation theorem characterizing the first-order translations
of temporal formulas.
To
smoothenthe
presentationof our
results, wewill
be workingwith
so-called pointed models; these are structures
of the
form(M,tu),
where,r.ulives
in
the
domainof
M; tr
is
calledthe
distinguished poi,ntof
(M,.).
We
will
assumethat
a bisimulation between two pointed models links theirdistinguished points.
we will
also be using the following operations on classes of models:pr,
Po,
B.
HerePr(K)
isthe
classof
ultraproductsof
modelsin
K;
po(K)
isthe class of ultrapowers of models
in
K; andB(K)
is the class ofall
modelsthat
are bisimilarto
a modelin
K.Lemrna
5.L
LetK
be a class of pointed models.1. K
is
closed u,n,der bisi,mulations and ultraproductsi.ff
K:
Bpr(K),
2. K
i,s closed under bi,simulations and ultrapowersiff K:
BPo(K).
Proof. we
only prove thefirst
item, and to prove thefirst
itemit
suffices to showthat PrB(K)
c
BPr(K).
So, assume(M,.)
e
PrB(K).
Then there are an index set 1, models(Mi,u;)
and(M,ut) (i
e
I)
suchthat (l/,,
r,l;)e
K,(Mt,ut)
ti
(lf,,u;),
and(M,-)
:
flu(Mt,w1),
for someultrafilter
U
over1.
tivially,
flu(l/,,u.;)
e
Pr(K).
By
Lemma 4.7,(M,w)
:fltr(Mt,wi) !)
flu(l/,,t';).
Hence,(M,-)
€
BPr(K),
asrequired.
-1We
will
saythat
a class K of pointed models isS,
U-definable, or simply definable,by
meansof
a
setof
temporal formulasif
there existsa
set of temporal formulas?
suchthat K
:
{(M,w)
|
(M,w)
=
T}.
A
class of pointed models K is defi,nable by means of a single formula
if
it
is definableby means of a singleton set.
Let K
be a
classof
pointed models; we useK
to
denotethe
class of pointed modelsthat
arenot
in
K.Theorem 5.2
LetK
be a class of pointed models. Then1.
K is
definable by means of a set oJ ternporal formulasiffK:
BPr(K)
andR:
BPo(K),
2. K
i,s definable by meansof
a single temporal formulaiff
K:
BPr(K)
and
K:
Bpr(K).
Proof.
1. The only i,f direction is easy. For the converse, we can 'bisimulate'familiar
arguments from first-order model theory. Assume K is closed underultraproducts and bisimulations, while
K
is closed under ultrapowers. LetT
:
fi{tptnr,-t@)
|(M,w) e
K}.We
will
showthat
7
definesK.
First,
K
I7.
Second, assumethat
(M,-) l?;
we needto
show (M,,u.r)e K.
Considertp(tr,.)(u),
and defineI :
{o
C
tpeur,-)(tu)|
l"l
<
u}.
For eachi,:
{or,...,on}
€
l
there isa model
(Mt,.r)
of
,iin
K.
By
standard model-theoretic arguments thereexists
an
ultraprodrct
llu(M6,u.r;)
whichis
a
modelof
tpga,*1(u.'); hencelIu(Mr,-)
=
(M,.).
AsPr(K)
e
K,lIu(Mr.,ur)
€
K.
Bv
Theorem 4.6there is an
ultrafilter
[//such that f]y,
(lIu(M1,ul))
tl'
llu,(M,u.').
Hence, thelatter
is in K, and, by the closure condition on K, this implies(M,w) e
K,as required.
2.
Again,
the onlyi/
direction is easy. AssumeK, K
satisfythe
statedconditions.
Then
both
are
closedunder
ultrapowers, hence,by item
1,there are sets
of
temporal formulasTt,
Tz definingK
andK,
respectively. Obviously,T1UT2
p I,
soby
compactnessfor
some @1,..-,
dn
e
Tt,|tt,
...,4)*€T2,we
have finQt.lY1-ry'i.
Then K is definedby
Atfu'
-1corollary
5.3 (Separation) Let K,
L
be classes of poi,nted models such,thatKOL:0.
1.
If
K is
closed under bisimulations and ultraproducts,and
L
is
closedund,er bi,simulati,ons and ultrapowers, then there erists a class of rnodels
M
that
is
d,efinable by meansof a
setof
temporal formulas and suchthatKCMandL|lM:0.
2.
If
bothK
and. Lare
closerl und,er bisimulations and, ultraproducts, thenthere erists
a
class of modelsM
thatis
def,nable by means ofa
sr,ngletemporal forrnula and such that K
C
M
and L O M:
0.Proof
.
we only prove thefirst item. Let
K' be the class of all pointed models(M,u)
suchthat for
some(N,r)
€K,
(M,u)
:
(N,T.u). Define L/ similarly'Then
K C
K/,
L C
L/and K/ and
L'
areboth
closed under=.
Moreover,KtoLt
:0.
For suppose(M,u) e K'fl
L';
then
thereexist
(N,u)
e
K,(N',r')
€
L suchthat
(N,u):
(M,,r)
:
(N',?r')'
By
Theorem4'6
(N'o)
and
(N/,u')
have bisimilarultrapowert
flu(N,u)
andfly(N',u')'
As K,
Lare closed under
B
and Po, this impliesflu(N,
u)
e
KnL-
a contradiction.To
completethe proof,
letT
:
A{tpfv,-l(-)
|
(M,tr.')
e
K'}'
Then?
defines
K'.
As Kc
K/ andK'o
L:
0, we aredone.
-1corollary
5.4
(Interpolation)
If
K, L
are both def,nable by single tem-poral forrnulas$
and{,
respectiuely, and Kfl
L:
A, then thereis
a class Mthat
is
d,efinable by a temporalformula
in
the con'Lrnon language of Q and !,twithKCM
andMfiL:0.
To obtain a characterization of the first-order formulas
that
are equiva-Ient to a temporal formula, we use the followingnotion.
A first-order formulaa(z) in Lr@)
is
inuariantfor
bisimulationsiff
for
any two pointed models(M,*)
and(N,u),
any two statesw'
e
M
ando' €
N,
and any bisimulationZ
srch fnat wtZut, we havethat
M
?
ol.'l
iff
N
I
a[r.'/].corollary
5.5
Leta(r)
be anL1(r)-formula.
Then the foltowing areequiu-alent.
1.
a(r)
is
inuariantfor
bisimulat,ions2.
a(r)
is
equiualent to the standard translation of a temporar formura.Proof.
The implication from 2to
1 is Lemma 3.10. For the converseimplica-tion, let
a(z)
be invariant for bisimulations.Let
K be the classof
(pointed) modelsof
cv(r).
ThenK
andK
(being definedby
-a(r))
are closed underultraproducts.
Asa(r)
is
invariantfor
bisimulations,both K
andK
must also be closed under bisimulations. Hence,by
Theorem b.2, K must bede-finable by a single temporal formula @. This means
that
a(r)
is (equivalentto)
the standard translation of@.
-16
Concluding
Remarks
In
this paper we have introduced a notion of bisimulation for temporal logicwith
Since andUntil
that
allows oneto
develop the basic model theory fortemporal
logic.
We established a preservation resultthat
characterizes thefirst-order
formulasthat
correspondto
temporal formulaswith
Since andUntil,
thereby answeringopen
Problem 4.4from
Van Benthem,van
Eijckand
Stebletsova[4]. In
addition
we proveddefinability
and interpolationresults.
A lot
remainsto
bedone. First of all,
we believethat
our notion
of bisimulation may be a usefultool in
obtainingfurther
resultsin
the modeltheory of since and
until.
In
particular, Hans Kamp's famous result of the expressive completenessof
Since andUntil
over dedekind-complete linearorder
is an important
one,for
whichmultiple
proofs should be available.one of the
most recent proofs, dueto
Ian
Hodkinson [1b] uses games thatseem
to
be quite
closeto
our
notion
of
bisimulation;
it
therefore seemsfeasible
to try
and prove Kamp's theorem using our bisimulations.Next, we
think that
our general methodology of involving more complexpatterns of states
in
the definition of bisimulationfor
Since andUntil
also indicates the way to go when attempting to define suitable bisimulations forother complex modal operators whose
truth
definition involves bothuniver-sal and existential
quantification.
In
particular, our
ideas seem applicableto
the
mr,ni,mality operator min whose semantics is given by,u
I
min(/)
itr1y(.
<
yAy
i
Q