A GENETIC SIMPLIFIED SWARM ALGORITHM FOR OPTIMIZING
n- CITIES OPEN LOOP TRAVELLING SALESMAN PROBLEM
CHIENG HOCK HUNG
A GENETIC SIMPLIFIED SWARM ALGORITHM FOR OPTIMIZING
n- CITIES OPEN LOOP TRAVELLING SALESMAN PROBLEM
CHIENG HOCK HUNG
A thesis submitted in
fulfillment of the requirement for the award of the Degree of Master of Information Technology
Faculty of Computer Science and Information Technology Universiti Tun Hussein Onn Malaysia
iii
DEDICATION
iv
ACKNOWLEDGEMENT
Firstly, I would like to give thanks to my best friend, Heavenly Father, for His unconditional love and favors in my life. He is the source of my strength, wisdom and knowledge. He has empowered and granted me strength to soar on wing like eagle above the raging sea.
Secondly, I would like to thanks my supervisor, Dr Noorhaniza Wahid as well. She was the direct contributor for this work. I would like to express my thankfulness to her from the bottom of my heart. Her understanding, wisdom and personal experiences have provided a good basis for this present thesis. She always guided and pointing me to the right direction toward fulfillment of this project. Other than that, she is also a kind person that always shares her life experiences to encourage and inspire me in this journey of research.
I am grateful to my beloved parents and sisters for their support, provision, care and love. They were always encouraged me and even prayed a lot for me along my Master research’s journey.
In addition, I would like to thanks Szakif Enterprize for providing me the best service in thesis proofreading.
Lastly, my special gratitude is due to my brothers and sisters in Hope Life Group. I wish to express my deepest and sincere thanks to them who had accompanied me with prayers, love, concern, support and advice over the past whole two years.
This research project would not have been completed without the help of many including the writing of others, who are acknowledged within the reference section.
v
PUBLICATION
vi
ABSTRACT
vii
ABSTRAK
viii
CONTENTS
TITLE i
DECLARATION ii
DEDICATION iii
ACKNOWLEDGEMENT iv
PUBLICATION v
ABSTRACT vi
ABSTRAK vii
CONTENTS viii
LIST OF TABLES xii
LIST OF FIGURES xiii
LIST OF ALGORITHMS xv
LIST OF SYMBOLS AND ABREVIATIONS xvi
LIST OF APPENDICES xix
CHAPTER 1 INTRODUCTION 1
1.1 Background of Study 1
1.2 Problem Statement 3
1.3 Objectives of the Study 4
1.4 Scope of the Study 4
1.5 Thesis Outline 5
CHAPTER 2 LITERATURE REVIEW 6
ix
2.2 The Concept of Optimization 6
2.2.1 Continuous Optimization 7
2.2.2 Combinatorial Optimization 8
2.3 Travelling Salesman Problem (TSP) 10
2.3.1 Variants of TSP 12
2.3.2 Open Loop Travelling Salesman
Problem (OTSP) 13
2.3.3 n-Cities Open Loop Travelling
Salesman Problem (nOTSP) 15
2.4 Genetic Algorithm 16
2.4.1 Genetic Operators 18
2.4.2 Mutation Operators 19
2.4.2.1 Inversion Mutation 20
2.4.2.2 Displacement Mutation 21
2.4.2.3 Pairwise Swap Mutation 21
2.4.3 Application of GAs on TSPs 22
2.5 Swarm Intelligence 24
2.6 Simplified Swarm Optimization 25
2.6.1 Algorithmic Structure and Flow 25
2.7 Chapter Summary 29
CHAPTER 3 RESEARCH METHODOLOGY 30
3.1 Introduction 30
3.2 Research Framework 30
3.3 nOSTP Topology Development 31
3.3.1 Nodes Generation 31
3.3.2 Nodes Mapping 33
x
3.3.4 nOTSP Creation 36
3.4 Genetic Simplified Swarm Algorithm (GSSA) 38
3.4.1 GSSA Development 40
3.4.2 Process of GSSA 45
3.5 Experimental Setup 46
3.5.1 Pre-processing: Determining the MaxGen 47 3.5.2 Parameter Setting and Data Collection 49
3.6 Performance Evaluation 49
3.6.1 Optimal Solution and Average 50
3.6.2 Influence of Population Size on Algorithm 50
3.7 Chapter Summary 50
CHAPTER 4 ANALYSIS AND RESULT 52
4.1 Introduction 52
4.2 Performance Analysis and Results 52
4.2.1 Shortest Path and Average Distance 53 4.2.2 Discussion on Algorithms’ Performance 56 4.2.2.1 New Characteristic of the Algorithm 56 4.2.2.2 Adequate Genetic Diversity 56 4.2.2.3 Destructive Effect of Crossover
Operator 57
4.2.2.4 Crossing Path 58
4.3 The Influence of the Size Population on Algorithms 59
4.4 Chapter Summary 62
CHAPTER 5 CONCLUSION 63
5.1 Introduction 63
xi
5.2.1 New Variant of TSP 63
5.2.2 Improved GA with SSO’s Characteristic 64 5.2.3 Performance of Proposed Algorithm-GSSA 64 5.2.4 Influence of the Population Size 65
5.3 Conclusion 65
REFERENCES 67
APPENDICES 81
xii
LIST OF TABLES
2.1 Related literatures on GAs for TSPs 22
3.1 Generated coordinates of each node 33
3.2 The symmetric distance-matrix 37
3.3 Fixed and adjusted parameters 47
3.4 Pre-processing results for n=10 48
3.6 Pre-processing results and MaxGen
for n=10, 20, 30 and 40 49
3.6 Characteristics of the algorithms 49
4.1 The shortest distances discovered from the executed
10 runs using GSSA, GA-XX and GA-1X 53 4.2 The shortest distances discovered by GSSA, GA-XX
and GA-1X for n=10, 20, 30 and 40. 54 4.3 Average distance over 10 runs using GSSA, GA-XX
and GA-1X 55
xiii
LIST OF FIGURES
2.1 Illustration of the vehicle routing problem 10 2.2 Illustration of the Travelling Salesman Problem 11
2.3 Variants of TSP 13
2.4 The difference between OTSP and nOTSP 16 2.5 Before and after the inversion mutation
was performed 20
2.6 Before and after the displacement mutation
was performed 21
2.7 Before and after the pairwise swap mutation
was performed 21
3.1 Research process 31
3.2 Nodes Mapped in Cartesian coordinate plane 34 3.3 The starting and ending points in the Cartesian
coordinate plane 35
3.4 Nodes position before and after the manipulation
of starting and ending points 35
3.5 New location of the starting and ending points 36 3.6 Population of chromosomes in matrix form 37 3.7 Arrangement of the first and second chromosomes
with number of gene n in a matrix 38
3.8 The flowchart of the SSO 39
3.9 The flowchart of the GA 40
3.10 SUM with three decision points 41
3.11 New SUM after modification was performed 41 3.12 Embedding process of the new SUM into the GA 43 3.13 The flowchart of Genetic Simplified Swarm
Algorithm 44
xiv
4.1 Cloning effect caused by crossover operator 58
4.2 Simulation of nOTSP’s paths 59
xv
LIST OF ALGORITHMS
2.1 Genetic Algorithm 17
2.2 Particle Swarm Optimization 26
2.3 Simplified Swarm Optimization 28
xvi
LIST OF SYMBOLS AND ABBREVIATIONS
d - Distance
𝐷 - Variable domain
E - Edge
𝑓(𝑥) - Function of x
G - Graph
𝑔𝑏𝑒𝑠𝑡 - Global best gloFit - Global fitness
i - Location of the particle in PSO
Inf - Infinity
maxFit - Maximum fitness value MaxGen - Maximum generation m - Number of total given cities
min - Smallest elements in array (MATLAB SYNTAX)
n - Number of visited cities
newFit - New fitness
p - Population size
𝑝𝑏𝑒𝑠𝑡 - Local best
randperm - Random permutation (MATLAB SYNTAX)
rand - Random (MATLAB SYNTAX)
𝑠 - Optimal solution
S - Global optimal solution
t - Time
V - Vertex
w - Inertial weight
zeros - Create array of all zeros (MATLAB SYNTAX)
α - Personal experience
xvii
ℝ - Real number
𝑣𝑖𝑡 - Particle velocity in PSO
𝑥𝑖𝑡 - Particle position in PSO
𝑐𝑖 - Constraints
𝐶𝑤, 𝐶𝑝, 𝐶𝑔 - Predetermined constants ACO - Ant Colony Optmization ABC - Artificial Bee Colony AI - Artificial Intelligent AIS - Artificial Immune System
AS - Ant System
BF - Bacterial Foraging
CSO - Cat Swarm Optimization
EA - Evolutionary Algorithm
DPfGA - Distributed Parameter Free Genetic Algorithm DPSO - Discrete Particle Swarm Optimization
GA - Genetic Algorithm
GA-1X - Genetic Algorithm with one-point crossover operator GA-GSTM - Greedy Sub Tour Mutation operator
GA-XX - Genetic Algorithm without crossover operator GNSS - Global Navigation Satellite System
GSO - Glowworm Swarm Optimization GSSA - Genetic Simplified Swarm Algorithm
nOTSP - n-Cities Open Loop Travelling Salesman Problem OTSP - Open Loop Travelling Salesman Problem
PSO - Particle Swarm Optimization
SA - Simulated Annealing
SUM - Solution Update Mechanism
TS - Tabu Search
xix
LIST OF APPENDICES
APPENDIX TITTLE PAGE
A Computational Results of GSSA, GA-XX
and GA-X1 81
B Pre-processing results for the predetermined
CHAPTER 1
INTRODUCTION
1.1 Background of Study
Road networks play a significant role for the economics growth and development of a city. Road networks can be described as the equivalent of the veins in the human body, and the vehicles are the blood cells that carry the nutrition from one part of the body to the another part. In the reality of transportation, it is important for the transportation system to identify the best route to navigate the drivers to their destination. For example, an emergency evacuation unit’s transportation fleet such as ambulances and firetrucks are required to reach the emergency site quickly by using shortest tour for evacuation and emergency purposes. The other example such as the Global Positioning System (GPS) that often used by the drivers in order to navigate and show them the shortest route to an unfamiliar place. Until today, many researches are still continuously improving the real-world vehicles routing system in order to provide more effective and efficient route to travel (Toth & Vigo, 2014; Gomez & Salhi, 2014; Royo et al., 2015). One of the common vehicles routing problem in computer science is Travelling Salesman Problem (TSP) (El-Gharably et al., 2013). This problem is used to simulate and solve routing problems.
2
the idea of TSP is in regard to a salesman who supposed to travel by visiting all the given cities exactly once and returns to the city he started, with the shortest route.
Despite TSP is devoted to a complete closed Hamilton path, TSP generally can be divided into two categories, which are Closed Loop TSP and Open Loop TSP (OTSP). Closed Loop TSP is similar with the ordinary TSP, while OTSP has a slight difference when compared with TSP. The difference between OTSP and TSP is that it has different starting and ending points. In other words, salesman in the OTSP travels to each city exactly once by departing from one city but does not return to the city where he departed.
However, in reality, today’s transportation issue is not exactly similar to what has been described in the TSP and OTSP. In contrary, the numerous of transportation issues are not related with “visit all the given cities”, in fact, simply visiting certain number of cities rather than all the given cities which can lead to shortest tour distance. For example, in the logistics of merchandise delivery services, the drivers are required to plan the route by departing from the depot to the destination without required to visit all the cities along the route, yet, they are restrained to a certain numbers of cities for cost and time saving purposes.
Inspired from this issue, this research proposes a new extension of OTSP called n-Cities Open Loop Travelling Salesman Problem (nOTSP). The nOTSP can be illustrated through the scenario where a salesman is given a set of cities, but only required to visit a certain number of cities rather than all the cities in a minimum tour.
Over the past decades, many algorithms have been successfully applied to a wide range of combinatorial problems including TSPs. These algorithms include Tabu Search (TS) (Pedro et al., 2013), Genetic Algorithm (GA) (Nagata & Soler, 2012) and Simulated Annealing (SA) (Wang et al., 2013). Among them, GA is one of the most popular algorithms that used to solve permutation problems such as TSP (Ahmed, 2010). In GA, it generates a set of possible solutions through permutation of the genes. Hence, the solutions of TSP can also be easily represented as permutation of genes in the GA.
3
Bee Colony algorithm (ABC) (Karaboga, 2005) and Bat algorithm (BA) (Yang, 2010).
Recently, another new swarm-based algorithm that has been proposed was named Simplified Swarm Algorithm (SSO) (Chung & Wahid, 2012). SSO is the variant of PSO. In the past, SSO is used to solve the classification problem and has shown good performances. One of the reasons for its success is due to its special characteristic, known as the comparison strategy. The purpose of this comparison strategy is to update the global best (gbest) solution once a better solution is found.
Therefore this research proposes a GA based algorithm by adopting the characteristic of SSO in GA. Hence, this algorithm is named as Genetic Simplified Swarm Algorithm (GSSA). Later, the algorithm is used to optimize the nOTSP.
1.2 Problem Statement
TSP is a well-known combinatorial problem that is often used to model vehicles’ routing issues such as in transportation scenarios. However, it is realized that the problems are not exactly similar as what has been pictured in TSP and OTSP. Conversely, the vehicle may only travel from the starting point to the ending point by visiting only a certain number of cities with minimum total travelling distance. For example, a logistic services company which is in charge of delivering goods from the depot to the destination by visiting only several numbers of cities, without passing through all the cities along the route to keep the minimum distance. In order to tackle this issue, this research models a variant of TSP called nOTSP.
4
diversity is crucial for the algorithm to avoid them to be trapped at the local optima (Gupta & Ghafir, 2012; Malik & Wadhwa, 2014).
To overcome the drawback, this research proposes an improved GA with SSO’s characteristic in order to prevent the loss of genetic diversity and improve the solutions.
1.3 Objectives of the Study
The objectives of this research are:
i. to propose a new extension of OTSP variant named n-Cities Open Loop Travelling Salesman Problem (nOTSP),
ii. to propose an improved technique of Genetic Algorithm (GA) with Simplified Swarm Optimization (SSO) algorithm’s characteristic to prevent the loss of the genetic diversity in the population,
iii. to develop the propose technique in (2) for optimizing the nOTSP in term of finding the shortest path, and
iv. to evaluate the performance of the proposed technique with other GA variants in terms of shortest distance and population size.
1.4 Scope of the Study
5
p, that are 1000, 2000, 3000, 4000 and 5000. During each experiment, each n is executed 10 times on different p. Meanwhile, the performances of the proposed algorithm are compared with other GA variants, which are GA without crossover operator (GA-XX) and GA with one-point crossover (GA-1X). On the other hand, computational time and iteration are not taken into account in this research.
1.5 Thesis Outline
The remaining of the chapters are structured as follows.
Chapter 2 provides the fundamental theories regarding the optimization, TSP, GA, SSO and their applications. This is followed by reviews of the research made by past researchers and scholars in the similar field. In addition, this chapter lays a foundation for constructing the nOTSP and the proposed algorithm.
Then, Chapter 3 discusses the methodology used in this research. This details how the problem is constructed, how the proposed algorithm is developed, how the experiment is carried out systematically and how the results are recorded, calculated and analyzed.
Furthermore, Chapter 4 presents the analysis and results of this research. In this chapter, the proposed algorithm that has been developed in Chapter 3 is further validated for its efficiency and accuracy based on the recorded experimental results. The analysis and evaluations are carried out based on the computational results. Later, the reasons are justified.
CHAPTER 2
LITERATURE REVIEW
2.1 Introduction
Many techniques have been proposed to optimize the Travelling Salesman Problem (TSP) or its variants in term of discovering the shortest route. Although many literatures covered a wide variety of the theories, this review only focuses on four dominant themes regarding the research topic. The four dominant themes are: the concept of optimization and its category, the definition of the TSP and n-Cities Open Loop Travelling Salesman Problem (nOTSP), the Genetic Algorithm (GA) as the base of the proposed technique and its application on similar problems, and the introduction of the Simplified Swarm Optimization (SSO) and its comparison strategy called solution update mechanism (SUM). Although many literatures have presented these themes through a variety of contexts, this study focuses on improved technique and its application on nOTSP. Thus, this chapter lays the foundation for the further development that is discussed in the next chapter.
2.2 The Concept of Optimization
7
The root of “optimization” is “optimal” that carries the meaning of “best”, “better” or “good enough” (Keeton et al., 2007; Fletcher, 2013). In other words, the phrase “optimal solution” can be explained as the “best solution”. Blum & Roli (2003) described optimization as concern the choice of a “best” configuration of a set of variables in order to achieve the goals. On the other hand, optimization can be defined as choosing the best solution among a given set of solutions (Khajehzadeh et al., 2011). Therefore, the optimization theory and methods are needed to deal with the problems by selecting the best alternative based on the given objective function (Chong & Zak, 2013).
The area of optimization has received numerous attentions in recent years particularly in the field of computer science, including the development of user-friendly software, high performance processors as well as applied in solving various high complexity problems by providing efficient solution from all feasible solutions. For instance, in the Global Positioning System (GPS), optimization plays the role in guiding the driver to reach the destination by discovering and providing the best possible route. However, in general, the area of optimization can be divided into two main categories, which are continuous optimization and combinatorial optimization (Blum & Roli, 2003). Both types of optimization will be discussed in details in the next subsection.
2.2.1 Continuous Optimization
8
According to Gould (2006) & Saleh (2014), an optimization problem is the minimization or maximization of an objective function f over a vector of variables x. This is subject to a vector of constraints c that the variables in x must satisfy. An optimization problem can be derived as in equation 2.1:
min 𝑓(𝑥) subject to {𝑐𝑖(𝑥) = 0 1 ≤ 𝑖 ≤ 𝑘
𝑐𝑖(𝑥) ≤ 0 𝑘 < 𝑖 ≤ 𝑚 (2.1)
where x = (𝑥1, 𝑥2, . . . ,𝑥𝑛) is a vector of n variables of the problem, f : ℝ𝑛→ℝ which is the objective function to be minimized, {𝑐𝑖 (x) = 0 |1 ≤ i ≤ k} are the equality constraints over the variables in the vector x and {𝑐𝑖 (x) ≤ 0 |k < i ≤ m} are the inequality constraints over the variables in the vector x. By using this convention, the standard form defines a minimization problem. A maximization problem can be treated by negating the objective function f to −f.
In real-world scenarios, the continuous optimization has been applied in many areas, such as optimize the high-pressure gas network in The National Grid Gas National Transmission System (NTS) at United Kingdom (UK) and optimize the electrical-power scheduling by minimizing the cost through controlling the flow of the current (Gould, 2006).
However, the optimization problem in this research does not belong to this category; instead, it belongs to the combinatorial optimization problem. The combinatorial optimization will be discussed in detail in the next section.
2.2.2 Combinatorial Optimization
The field of optimization is a rapidly growing research field that concerned with the choice of optimal solutions for a set of variables into achieving the objectives. In the field of applied mathematics and theoretical computer science, combinatorial optimization is a topic that consists of finding an optimal from a finite set of objects (Schrijver, 2003). Cook et al., (2009) described that combinatorial optimization is a combination of both combinatorics linear programming and the theory of algorithms for solving the optimization problem over discrete structure. Furthermore, Luke (2012) mentioned that the combinatorial optimization problem is the solution that
9
consists of a combination of unique components selected from a typically finite or called set. In short, the ultimate purpose and objective are to find the optimal combinatorial of components.
According to Blum & Roli (2003), a combinatorial optimization problem P=(S, f) can be defined by, a set of variables X = {𝑥1, 𝑥2…..𝑥𝑛}, variable domains
𝐷1, 𝐷2…..𝐷𝑛, constraints among variables and an objective function f to be minimized, where f : 𝐷1×𝐷2 ×…..×𝐷𝑛 →ℝ+. As maximize the problem, one can simply negate the objective function f to –f. Hence, the set of all possible feasible assignments is shown here:
𝑆 = {𝑠 = {(𝑥1, 𝑣1), … , (𝑥𝑛, 𝑣𝑛)} | 𝑣𝑖 ∈ 𝐷𝑖, 𝑠 𝑠𝑎𝑡𝑖𝑠𝑓𝑖𝑒𝑠 𝑎𝑙𝑙 𝑡ℎ𝑒 𝑐𝑜𝑛𝑠𝑡𝑟𝑎𝑖𝑛𝑡𝑠}, (2.2)
where, S denotes the search space or solution space. Each element of the set can be treated as the possible solution to the problem. Once the optimal solution 𝑠∗ ∈ 𝑆 with minimum objective function has been found, that is, 𝑓(𝑠∗) ≤ 𝑓(𝑠)∀𝑠∈𝑆. Thus, 𝑠∗ is called a global optimal solution of (S, f) and 𝑆∗ ⊆ 𝑆 is the set of globally optimal solution (Blum & Roli, 2003).
One example of combinatorial optimization problem is the knapsack problem. The purpose of the knapsack problem is to fill the items into the knapsack with the total highest value yet without overfilling the knapsack (Luke, 2012). Another ubiquitous example of combinatorial optimization problem is the vehicle routing problem (VRP) that was proposed by Dantzig & Ramser (1959). The aim of this problem is to determine a set of path with least cost, where a vehicle will depart from the depot to visit each city to serve the demands exactly once by exactly one vehicle and all the routes will start and end at the same depot. While, the total demand on each route does not exceed the vehicle capacity. The VRP is illustrated in Figure 2.1
10
Figures 2.1: Illustration of the vehicle routing problem. (Source: http://neo.lcc.uma.es/)
2.3 Travelling Salesman Problem (TSP)
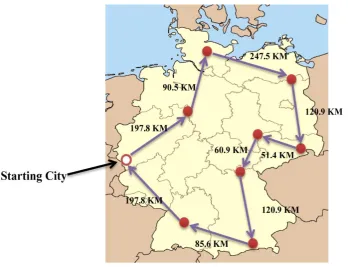
TSP is a NP-hard problem that has been widely studied in the field of combinatorial optimization (Yan et al., 2012). It was first formulated by Karl Menger in 1930 (Maredia, 2010; Singh & Lodhi, 2013). The name “Travelling Salesman Problem” was introduced by Hassler Whitney in Princeton University at 1934 (Alexander, 2005). Figure 2.2 shows the illustration of the TSP. TSP can be described as follow, a salesman who desires to visit n cities, and supposed to find out the shortest Hamilton tour through visiting all the cities only once and finally returning to the city where he started. In 1954, TSP was derived as an integer program and solved by using cutting plane method (Dantzig et al., 1954).
11
Figure 2.2: Illustration of the Travelling Salesman Problem. (Source:
http://www.pixbam.com/germany-map/file:blank-map-germany-states./2389)
According to Matai et al., (2010) the feasible solutions of TSP is given as (n-1)!/2 where n represents the number of cities. TSP can be presented on a complete undirected graph G = (V, E), where V = {1,…,n} is denoted to the vertex node or city, E = {(i, j) : i, j ∈ V, i < j} is an edge set and A = {(i, j): i, j ∈ V, i ≠ j} is an arc set. A non-negative distance matrix D = (𝑑𝑖𝑗) is defined on E or on A. In particular, this is the case of planar problems in which the vertices are points 𝑃𝑖 = (𝑋𝑖,𝑌𝑖) in the plane, and 𝑑𝑖𝑗=√(𝑋𝑖− 𝑋𝑗)2+ (𝑌𝑖− 𝑌𝑗)2 is the Euclidean distance. The triangle inequality is also satisfied if 𝑑𝑖𝑗 is the length of a shortest path from i to j on G.
12
distribution of food products from producers to shops, the distribution of fuel to petrol stations and the distribution of various products from producers or distributors to customers (Filip & Otakar, 2011).
2.3.1 Variants of TSP
The idea of traditional TSP consists of a complete closed loop which visits all the given cities once and returns to its original point. Due to the different scenarios that happen today, TSP has been modelled into different variants. These variants of TSP can be classified into two main categories which are the closed loop travelling salesman problem (TSP) and open loop travelling salesman problem (OTSP). Both problems carry the same objective which is to find the minimum tour length. The only difference between them is the starting and ending points. TSP has the same starting and ending point, while OTSP has the different starting and ending point (Wang et al., 2013).
Apart from that, TSP and OTSP can also be divided into two sub-categories, which are, single depot multiple salesman (SDMS) and multiple depots multiple salesman (MDMS) (Tang et al., 2000; Nallusamy, 2013; Wang et al., 2013). In TSP, the subcategories are known as single depots multiple salesman-TSP (SDMS-TSP) and multiple depots multiple salesman-TSP (MDMS-TSP). However, in OTSP, the subcategories are known as single depots multiple salesman-OTSP (SDMS-OTSP) and multiple depots multiple salesman-OTSP (MDMS-OTSP). Literally, both SDMS and MDMS are containing more than one salesman to operate in the same time; meanwhile, the difference between both SDMS and MDMS is the number of depot. The variants of TSP are shown in Figure 2.3.
13
Variants of TSP
Closed Loop TSP (TSP) Open Loop TSP (OTSP)
Single Depot Multiple
Salesman -Travelling
Salesman Problem
(SDMS-TSP)
Multiple Depot
Multiple Salesman -
Travelling Salesman
Problem (MDMS-TSP)
Single Depot Multiple
Salesman - Open Loop
Travelling Salesman
Problem
(SDMS-OTSP)
Multiple Depot
Multiple Salesman -
Open Loop Travelling
Salesman Problem
[image:31.595.108.532.68.552.2](MDMS-OTSP)
Figure 2.3: Variants of TSP
2.3.2 Open Loop Travelling Salesman Problem (OTSP)
OTSP can be modelled according to the real-life scenario of today’s transportation services. The purpose of OTSP is to find the minimum total distance of the vehicle when travelling from a starting point to the ending point by visiting all the given cities exactly once. According to Čičková et al. (2013), the OTSP can be defined by, n which refers to a set of nodes, the indices i and j refer to customers and take values
Depot
14
between 2 and n, while index i = 1 refers to the depot, 𝑑𝑖𝑗 refers to distance between i and j, where i, j = 1, 2, …n. The binary variables 𝑥𝑖𝑗, i, j = 1, 2, ... n with a following notation: 𝑥𝑖𝑗= 1 if customer i precedes customer j in a route of the vehicle and 𝑥𝑖𝑗= 0 otherwise, and variables 𝑢𝑖, i = 2, 3,…n that based on the well-known Tucker’s formulation of the TSP (Miller et al., 1960). Then, the formula for OTSP is:
min
Σ
𝑖=1𝑛Σ
𝑗=1𝑛 𝑑𝑖𝑗𝑥𝑖𝑗(2.3)
subject to
Σ
𝑖=1𝑛𝑥
𝑖𝑗 = 1 j= 2, 3,…n i ≠ j (2.4)Σ
𝑗=2𝑛 𝑥𝑖𝑗 ≤ 1 i=1, 2,...n i ≠ j (2.5)Σ
𝑗=2𝑛 𝑥1𝑗 = 1 i= 2, 3,...n (2.6)𝑢𝑖 − 𝑢𝑗 + 𝑛𝑥𝑖𝑗 ≤ 𝑛 − 1 i, j= 2, 3,...n i ≠ j (2.7)
𝑥𝑖𝑗 ∈ {0,1} i, j = 1, 2,...n i ≠ j (2.8)
The objective function (2.3) expresses the minimization of the total distance of vehicle route; (2.4) is the standard constraints that ensure the vehicle visits every customer; (2.5) is a constraints that ensure the vehicle does not need to depart from every costumer, because the route ends after serving the last person; constraints (2.6) to ensure the vehicle starts its route exactly once, (2.7) is the sub-tour elimination constraints and (2.8) is the integrality constraints.
Recently, Vashisht (2013) have implemented GA in OTSP, and showed that GA has proved its suitability to solve OTSP. However, the author also claimed that GA has its difficulty to maintain the optimal solution over many generations. Furthermore, he was suggested that perhaps there is better crossover or mutation operators can be found and implemented to generate better solutions. Meanwhile, Wang & Hou (2013) had employed a Simple Model (SModel) in multi-depots OTSP to determine the best numbers of salesman with nearly minimum total distance. From the experimental results, the reported performance was excellent and this almost generates the minimum total distances.
15 modified and applied in today’s vehicle routing problems to provide better solution for single vehicle travelling between the given source and its destination, this is especially beneficial for logistic transportation routing such as for merchandise delivery. Therefore, this study proposes another new variant of OTSP.
2.3.3 n-Cities Open Loop Travelling Salesman Problem (nOTSP)
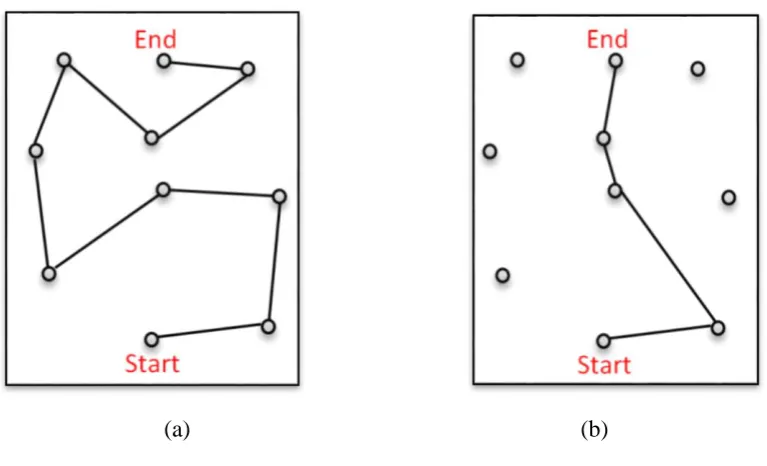
The new variant of OTSP, which is proposed in this study named as n-Cities Open Loop Travelling Salesman Problem (nOTSP). In the nOTSP, the salesman departs from the starting city to another city without requiring him to visit all the given m cities. However, he is restrained to visit only n cities with the minimum total distance. This problem was inspired and modelled on real-life transportation problems. For example, in the logistic transportation routings of merchandise delivery, the delivery starts from the depot to the destination without passing through all the cities. Hence, only limited number of cities is required. Figure 2.4 illustrates the difference of OTSP and nOTSP. In Figure 2.4 (a) the pathway of a vehicle travels from a starting point to the destination by required to visit all the cities in OTSP is illustrated. Meanwhile, Figure 2.4 (b) illustrates the pathway of a vehicle that travels from the starting point to the destination without being required to visit all the cities in the nOTSP.
The formulation of the nOTSP is nearly similar as the formulation in OTSP. In OTSP, the number of given cities, m is equal to the number of visited cities, n by the salesman. In the other word, this can be defined as n = m. But in the nOTSP, the number of cities to be visited n is not exactly equal to the total number of cities m that has been given to the salesman and therefore, n≠m.
16
Although there are many algorithms that can applied in TSP and its variants, one of the best metaheuristic algorithms is GA (Abound & Abouchabaka, 2012; Vashisht, 2013; Singh & Lodhi, 2013). The major reason behind this is its flexibility, robustness and versatility, which have been widely studied to solve combinatorial and optimisation problems such as in Singh & Lodhi (2013) and Singh & Singh (2014). In addition, the study proposed by Philip et al. (2011) stated that GA is a very good local search algorithm for solving TSP through generating a present number of random tours and then improving the population until its stop condition is met. Moreover, Vashisht (2013) also stated that GA is suitable to solve TSP because it does not need to explore every possible solution in the feasible region in order to obtain a good result. Hence, the GA will be discussed in the next section.
[image:34.595.127.511.326.559.2]
(a) (b)
Figure 2.4: The difference between OTSP and nOTSP. (a) Classic Open Loop Travelling Salesman Problem (OTSP), (b) n-Cities Open Loop Travelling Salesman
Problem (nOTSP).
2.4 Genetic Algorithm
17
based on the natural selection and survival of the fittest chromosomes (Albayrak & Allahverdi, 2011; Bahaabadi et al., 2012). Each chromosome is formed by genes. The set of chromosomes is known as “population”.
The GA process starts by generating a random population based on the principles of natural selection. In the population, each chromosome is evaluated to determine the potential chromosomes. The potential chromosomes are selected for a recombination process to produce new chromosomes to replace the poorer chromosomes (Sallabi & El-Haddad, 2009). In this way, the better chromosomes produced each new generation. The process will continue for many generations until the condition is met. The following pseudocode describes the processes of GA.
A Genetic Algorithm Pseudocode
Step 1: Choose an initial random population of individuals, p. Step 2: Evaluate the fitness of the individuals, f.
Step 3: repeat
Step 4: Select the best individual to be used by the genetic operators. Step 5: Generate new individuals using crossover and mutation
operators.
Step 6: Evaluate the fitness of the new individuals.
Step 7: Replace the worst individuals of the population by the best new individuals.
Step 8: until some stop criteria is met.
Algorithm 2.1: Genetic Algorithm (Goldberg & Holland, 1988)
18
However, GAs often suffered from premature convergence that caused by the loss of genetic diversity in the population (Malik & Wadhwa, 2014). Gupta & Ghafir (2012) have considered the insufficiency of genetic diversity as the major reason that causes GA to prematurely converge. In GA, insufficiency of genetic diversity tends to lead the solutions converge towards the local optima or even the arbitrary points rather than toward the global optimum (Ghosh, 2012). This phenomenon occurs when the genetic operators can no longer produce offspring with a better performance than their parents. In other word, sufficient genetic diversity in the population could allow the algorithm continues searching for the better solutions, avoiding them to be trapped at the local optima and become stagnant (Gupta & Ghafir, 2012). Hence, in order to avoid the premature convergence happen, the action of preserving the genetic diversity is needed.
2.4.1 Genetic Operators
GA maintains the genetic diversity and combines the existing chromosomes with others through some mechanisms called genetic operators, such as encoding, selection, crossover and mutation. Each operator has its own purpose and responsibility.
The first operator in GA is known as the encoding operator. The purpose of this encoding operator is to transform the problem solution into chromosome or called gene sequence. There are many encoding techniques such as binary encoding, permutation encoding, value encoding and tree encoding that can be applied according to the model of the problem (Malhotra et al., 2011). Since that every chromosome is a string of numbers in a sequence, the permutation encoding is the best encoding for ordering or queuing problems such as TSP (Malhotra et al., 2011).
19
been selected will be moved to the mating pool while the remaining unselected individuals are eliminated.
The mating pool is a place where the selected chromosomes (parents) will undergo the recombining (mating) process to produce a new child (new chromosome or offspring) (Geetha et al., 2009). Crossover operator is applied in this stage to expect the better offspring to be produced from the parents. The examples of crossover techniques are single point crossover, two point crossover, multi-point crossover, uniform crossover and three parent crossover (Geetha et al., 2009).
Lastly, the new chromosomes are brought to the mutation operator. Mutation operator manipulates and reallocates the genes in the chromosome hope to produce better chromosomes or solutions that are closer to the fitness. Holland (1975) underlined that the roles of mutation is to provide a guarantee to the algorithm is not trapped on a local optimal and at the same time it introducing diversity. This view was also supported by Sallabi & El-Haddad (2009), and Negnevitsky (2011) from the perspective of algorithmic functioning that the purpose of the mutation is to prevent the algorithm from being trapped in a local minimum and to avoid the loss of genetic diversity.
Therefore, implement the mutation operator in the algorithm is crucial in order to prevent the loss of diversity and from being trapped in local optima. The examples of mutation techniques such as, flipping mutation, interchanging mutation, boundary mutation and reversing mutation. More details in regards to the mutation operators are presented on the next section.
2.4.2 Mutation Operators
The quality of GA solution relies on two important operators which are crossover and mutation operators. The purpose of crossover operator is to exploit the current solution in order to find the better ones. Meanwhile, the role of mutation is to maintain the genetic diversity in order to prevent the algorithms from being trapped in a local optimal and preventing the population of chromosomes from becoming too similar to each other (Sivanandam & Deepa, 2007).
20
divided over the importance of crossover versus mutation. On one hand, Holland (1975) claimed that crossover operator is more important than mutation operator. On the other hand, there were scholars who believe that the role of mutation is more significant than crossover. Meanwhile, Fogel & Atmar (1990), and Fogel (1990, 1993 and 2006) made a strong claim that crossover has no general advantage over mutation since mutation can also do what crossover does. Furthermore, Fogel also stated that mutation alone can do everything and it is very useful in optimising the function task (Fogel & Atmar, 1990 and Fogel, 1993; 2006). Later, Sivanandam & Deepa (2007) revealed that applying crossover operator into GA to solve TSP does not produce good solution for overall performances. In addition, Thibert-Plante & Charbonneau (2007) also found that crossover was not particularly helpful in producing better solution and Zheng et al., (2010) have discovered the importance of mutation, where without mutation, GA tends to converge prematurely.
There are few common mutation operators such as inversion mutation, displacement mutation and pairwise swap mutation are usually found to be implemented in GA to solve the TSP. These three mutations were used in the work of Albayrak & Allahverdi (2011) and Singh & Lodhi (2013) to optimize the TSP in term of finding the shortest tour. Therefore, these three mutation operators will be used in the algorithm. The details of these three mutation operators are explained in the next section.
2.4.2.1 Inversion Mutation
The inversion mutation performs inversion of the substring between two selected cities. Figure 2.5 explains the inversion mutation concept. Suppose two selected cities, which are city 9 and city 2. Then the substring is (9 3 7 4 6 2). After the inversion mutation is performed, the substring (9 3 7 4 6 2) was inverted and become (2 6 4 7 3 9).
Before mutation 1 5 9 3 7 4 6 2 8 0
After mutation 1 5 2 6 4 7 3 9 8 0
21
2.4.2.2 Displacement Mutation
Displacement mutation pulls the first selected gene out of the set of string and reinserts it into a different place then sliding the substring down to form a new set of string. In this case, city 9 was taken out from the tour and placed behind city 2, at the same time the substring (3 7 4 6 2) was slid down to fill the empty space. This is shown in Figure 2.6.
Before mutation 1 5 9 3 7 4 6 2 8 0
After mutation 1 5 3 7 4 6 2 9 8 0
Figure 2.6: Before and after the displacement mutation was performed.
2.4.2.3 Pairwise Swap Mutation
In pairwise swap mutation, the residues at the randomly chosen two positions swapped. Sometimes, this technique is also called interchange mutation or random swap (Sallabi and El-Haddad, 2009). For this case, the location of city 9 and city 2 will be swapped. This is shown in Figure 2.7.
Before mutation 1 5 9 3 7 4 6 2 8 0
After mutation 1 5 2 3 7 4 6 9 8 0
22
2.4.3 Application of GAs on TSPs
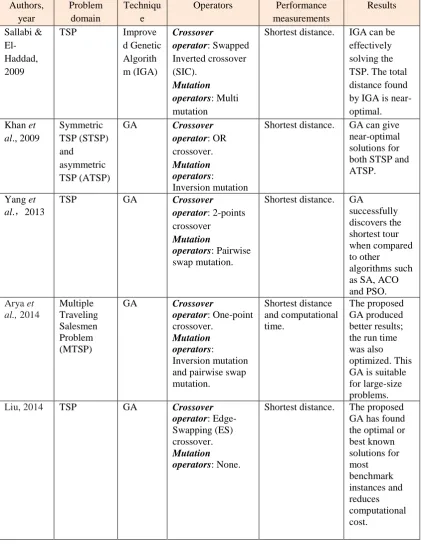
[image:40.595.109.531.224.769.2]Many researches had proven that GA and its hybrid variant have the potentials to solve TSPs. Some of the reviews of the related literature are detailed in Table 2.1.
Table 2.1: Related literatures on GAs for TSPs.
Authors, year Problem domain Techniqu e
Operators Performance
measurements Results Sallabi & El-Haddad, 2009
TSP Improve
d Genetic Algorith m (IGA) Crossover operator: Swapped Inverted crossover (SIC). Mutation operators: Multi mutation
Shortest distance. IGA can be
effectively solving the TSP. The total distance found by IGA is near-optimal. Khan et al., 2009 Symmetric TSP (STSP) and asymmetric TSP (ATSP)
GA Crossover
operator: OR crossover. Mutation operators:
Inversion mutation
Shortest distance. GA can give
near-optimal solutions for both STSP and ATSP.
Yang et al.,2013
TSP GA Crossover
operator: 2-points crossover
Mutation
operators: Pairwise swap mutation.
Shortest distance. GA
successfully discovers the shortest tour when compared to other algorithms such as SA, ACO and PSO. Arya et
al., 2014
Multiple Traveling Salesmen Problem (MTSP)
GA Crossover
operator: One-point crossover.
Mutation operators:
Inversion mutation and pairwise swap mutation. Shortest distance and computational time. The proposed GA produced better results; the run time was also optimized. This GA is suitable for large-size problems. Liu, 2014 TSP GA Crossover
operator: Edge-Swapping (ES) crossover. Mutation operators: None.
Shortest distance. The proposed
23
Yao, 2014 TSP GA + PSO Crossover operator: Edge-Swapping (ES) crossover. Mutation operators: Inversion mutation and pairwise swap mutation. Shortest distance and convergence rate. The proposed algorithm overcomes the drawbacks as low convergence rate and local optimum when using PSO. Chen &
Chien, 2011a
TSP GA+SA+
ACS+PS O
Crossover operator: Bone-crossover and two-point crossover Mutation operators: simulated annealing mutation and pheromone-mutation Shortest distance and convergence rate. The proposed algorithm generates better average tour lengths and smaller percentage deviations compared to previous studies. Chen & Chien, 2011b
TSP GA+AC
S Crossover operator: Bone-crossover Mutation operators: Route-mutation and pheromone-mutation
Shortest distance. The proposed
algorithm generates better average tour lengths compared to previous studies. Zhang & Lu, 2012
TSP GA+AC
O
Crossover
operator: single
point crossover Mutation operators: Reversal mutation. Shortest distance and convergence rate. Proposed algorithm has higher converging speed, stability and global optimization ability. Dong et
al., 2012
TSP GA+AS Crossover
operator: single
point crossover Mutation operators: Reversal mutation. Shortest distance and convergence rate. Proposed algorithm has superior performance for solving TSPs in terms of capability and consistency of achieving the global optimal solution, and quality of average optimal solutions, particularly for small TSPs.
24
GA with the swarm based algorithms for the purpose of improving the convergent rate of the algorithm. This can be clearly seen in the researches of Yao (2014), Chen & Chien, (2011a; 2011b), Zhang & Lu (2012) and Dong et al. (2012) that the approach of integrating the GA with swarm-based algorithms have the potential to aid the problem of prematurely convergence in the algorithm. Therefore, this study also has the intention to integrate the swarm-based algorithm into the GA to overcome its drawback in term of insufficiency of the genetic diversity that causing the prematurely convergence of the algorithm.
2.5 Swarm Intelligence
Swarm intelligence is a sub-field of evolutionary computing. “Swarm” is a term often used to describe a huge number of homogeneous living creatures or organisms moving without central controls (Ahmed & Glasgow, 2012). For examples, colonies of ants and bees, flocks of birds or schools of fishes. In the recent years, swarm-based algorithms have been chosen and successfully applied in many areas to solve high complexity problems through producing a set of effective solutions (Blum & Merkle, 2008; Hiot, 2010).
The expression of “Swarm Intelligence” has been used since 1989, when it was first introduced by G. Beni and J. Wang in the context of cellular robotic systems (Beni & Wang, 1989). Swarm intelligence can be defined as an efficient computational model in the artificial intelligence (AI) field which was inspired by the collective behaviors of the swarm of homogeneous living such as self-organization, decentralized control and communication (Blum & Merkle, 2008; Mishra et al., 2013).
REFERENCES
Abdoun, O. & Abouchabaka, J. (2012). A Comparative Study of Adaptive Crossover Operators for Genetic Algorithms to Resolve the Traveling Salesman Problem. arXiv preprint arXiv:1203.3097
Ahmed, Z. H. (2010). Genetic algorithm for the traveling salesman problem using sequential constructive crossover operator. International Journal of Biometrics & Bioinformatics, 3(6), pp. 96.
Ahmed, H. & Glasgow, J. (2012). Swarm Intelligence: Concepts, Models and Applications. Technical Report. Kingston: Queen's University.
Albayrak, M., & Allahverdi, N. (2011). Development a new mutation operator to solve the Traveling Salesman Problem by aid of Genetic Algorithms. Expert Systems with Applications, 38(3), pp.1313-1320.
Al-Dulaimi, B. F., & Ali, H. A. (2008). Enhanced traveling salesman problem solving by genetic algorithm technique (TSPGA). World Academy of Science, Engineering and Technology, 2(2), pp. 296-302.
Alexander, S. (2005). On the history of combinatorial optimization (till 1960).Handbooks in Operations Research and Management Science: Discrete Optimization.
Andrade, C. E., Miyazawa, F. K., & Resende, M. G. (2013, July). Evolutionary algorithm for the k-interconnected multi-depot multi-traveling salesmen problem. Proceeding of the fifteenth annual conference on Genetic and evolutionary computation conference. pp. 463-470. ACM.
68
Arya, V., Goyal, A., & Jaiswal, V. (2014). An Optimal Solution to Multiple Travelling Salesperson Problem using Modified Genetic Algorithm. International Journal of Application or Innovation in Engineering & Management, 3(1).
Ausiello, G., Crescenzi, P., Gambosi, G., Kann, V., Marchetti-Spaccamela, A., & Protasi, M. (2012). Complexity and approximation: Combinatorial optimization problems and their approximability properties. Springer Science & Business Media.
Bae, C., Yeh, W. C., Wahid, N., Chung, Y. Y. & Liu, Y. (2012). A new simplified swarm optimization (SSO) using exchange local search scheme. International Journal of Innovative Computing, Information and Control, 8(6), pp. 4391 - 4406.
Bahaabadi, M. R., Mohaymany, A. S. & Babaei, M. (2012). An Efficient crossover operator for travelling salesman. International Journal of Optimization in Civil Engineering, 2(4), pp. 607-619
Bakar, N. A., & Mahadzir, M. F. (2010). The Impact of Population Size on Knowledge Acquisition in Genetic Algorithms Paradigm: Finding
Solutions in the Game of Sudoku. Knowledge Management International Conference 2010.
Beni, G. & Wang, J. (1989). Swarm intelligence in cellular robotic systems. NATO Advance Workshop on Robots and Biological Systems.
Blum, C. & Roli, A. (2003). Metaheuristics in combinatorial optimization: Overview and conceptual comparison. ACM Computing Surveys, 35(3), pp.268 - 308. Blum, C. & Merkle, D. (2008). Swarm intelligence: Introduction and Applications.
Natural Computing. Berlin: Springer.
69
Chen, S. M., & Chien, C. Y. (2011b). Parallelized genetic ant colony systems for solving the traveling salesman problem. Expert Systems with Applications,38(4), 3873-3883.
Chong, E. K., & Zak, S. H. (2013). An introduction to optimization. Vol. 76. John Wiley & Sons.
Chung, Y. Y. & Wahid, N. (2012). A hybrid network intrusion detection system using simplified swarm optimization (SSO). Applied Soft Computing. pp. 3014 – 3022.
Čičková, Z., Brezina, I., & Pekár, J. (2013). Open Travelling Salesman Problem with time window. First Logistics International Conference Belgrade.
Collet, P., & Rennard, J. P. (2007). Stochastic optimization algorithms. arXiv preprint arXiv:0704.3780.
Colorni, A., Dorigo, M., Maniezzo, V. & Trubian, M. (1994). Ant system for job-shop scheduling. Belgian Journal of Operations Research, Statistics and Computer Science, 34(1), pp. 39 - 53.
Colorni, A., Dorigo, M., & Maniezzo, V. (1992). An Investigation of some Properties of an``Ant Algorithm''. PPSN, 92, pp. 509-520.
Cook, W. J., Cunningham, W. H., Pulleyblank, W. R., & Schrijver, A. (2009). Combinatorial optimization.
Dantzig, G., Fulkerson, R., & Johnson, S. (1954). Solution of a large-scale traveling-salesman problem. Journal of the operations research society of America, 2(4), pp. 393-410.
Dantzig, G. B. & Ramser, J. H. (1959). The truck dispatching problem. Management science, 6(1), pp. 80-91.
70
Dong, G., Guo, W. W., & Tickle, K. (2012). Solving the traveling salesman problem using cooperative genetic ant systems. Expert Systems with Applications, 39(5), pp. 5006-5011.
Dorigo, M., Maniezzo, V., Colorni, A. & Maniezzo, V. (1991). Positive feedback as a search Strategy. Dipartimento di Elettronica.
Dorigo, M. & Maniezzo, V. (1992). Optimization, Learning and Natural Algorithms. Ph. D. Thesis, Politecnico di Milano, Italy.
Dorigo, M., Birattari, M. & Stutzle, T. (2006). Ant colony optimization. Computational Intelligence Magazine, IEEE, 1(4), pp. 28-39.
Dorigo, M., & Gambardella, L. M. (2014). Ant-Q: A reinforcement learning approach to the traveling salesman problem. Proceedings of ML-95, Twelfth Intern. Conf. on Machine Learning, pp. 252-260.
Dwivedi, V., Chauhan, T., Saxena, S., & Agrawal, P. (2012). Travelling Salesman Problem using Genetic Algorithm. IJCA Proceedings on Development of Reliable Information Systems, Techniques and Related Issues (DRISTI 2012), (1), 25.
Eberhart, R. & Kennedy, J. (1995). A new optimizer using particle swarm theory. Proceedings of the Sixth International Symposium on Micro Machine and Human Science, pp. 39 - 43.
El-Gharably, N. E., El-Kilany, K. S., & El-Sayed, A. E. (2013). Optimization Using Simulation of the Vehicle Routing Problem. Proceedings of World Academy of Science, Engineering and Technology. World Academy of Science, Engineering and Technology (WASET). 78(7), pp. 1573.
Fletcher, R. (2013). Practical methods of optimization. John Wiley & Sons.
71
Fogel, D. B. (1993). Empirical estimation of the computation required to reach approximate solutions to the travelling salesman problem using evolutionary programming. Proceedings of the 2nd Annual Conference on Evolutionary Programming, 685, pp. 56-61.
Fogel, D. B., & Atmar, J. W. (1990). Comparing genetic operators with Gaussian mutations in simulated evolutionary processes using linear systems.
Biological Cybernetics, 63(2), pp.111-114.
Fogel, D. B. (2006). Evolutionary computation: toward a new philosophy of machine intelligence. Vol. 1. John Wiley & Sons.
Fogel, L. J., Owens, A. J., & Walsh, M. J. (1966). Artificial intelligence through simulated evolution. John Wiley & Sons.
Gao, Y. X., Wang, Y. M., & Pei, Z. L. (2012). An improved particle swarm optimisation for solving generalised travelling salesman problem. International Journal of Computing Science and Mathematics, 3(4), pp. 385-393.
Geetha, R.R., Bouvanasilan, N. & Seenuvasan, V. (2009). A perspective view on Travelling Salesman Problem using genetic algorithm. Nature & Biologically Inspired Computing, 2009. World Congress. pp.356-361.
George, A., Rajakumar, B. R., & Binu, D. (2012). Genetic algorithm based airlines booking terminal open/close decision system. Proceedings of the International Conference on Advances in Computing, Communications and
Informatics. pp. 174-179.
Ghosh, D. (2012). A diversification operator for genetic algorithms. OPSEARCH, 49(3), pp. 299-313.
Goldberg, D. E., & Holland, J. H. (1988). Genetic algorithms and machine learning. Machine learning, 3(2), pp. 95-99.
72
Goldbarg, E. F., de Souza, G. R., & Goldbarg, M. C. (2008). Particle swarm optimization algorithm for the traveling salesman problem. INTECH Open Access Publisher.
Gomez, A., & Salhi, S. (2014). Solving capacitated vehicle routing problem by artificial bee colony algorithm. In Computational Intelligence in Production and Logistics Systems (CIPLS), 2014 IEEE Symposium on (pp. 48-52). IEEE. Gould, N. (2006). An introduction to algorithms for continuous optimization. Oxford
University Computing Laboratory Notes..
Gupta, D., & Ghafir, S. (2012). An overview of methods maintaining diversity in genetic algorithms. International Journal of Emerging Technology and Advanced Engineering, 2(5), pp. 56-60.
Haxhimusa, Y., Carpenter, E., Catrambone, J., Foldes, D., Stefanov, E., Arns, L., & Pizlo, Z. (2011). 2D and 3D traveling salesman problem. The Journal of Problem Solving, 3(2), pp. 8-35.
Hiot, L. M. (2010). Adaptation, Learning, and Optimization: Handbook of Swarm Intelligence: Concepts, Principles and Applications. Vol. 8. Springer.
Hlaing, Z. C. S. S., & Khine, M. A. (2011). An ant colony optimization algorithm for solving traveling salesman problem. International Conference on Information Communication and Management ,16, pp. 54-59.
Holland, J. (1975). Adaptation in Natural and Artificial System: An Introduction with application to biology, control and artificial intelligence. Cambridge: University of Michigan Press.
Holland, J. H., Booker, L. B., Colombetti, M., Dorigo, M., Goldberg, D. E., Forrest, S., & Wilson, S. W. (2000). What is a learning classifier system? Learning Classifier Systems. pp. 3-32. Springer Berlin Heidelberg.
73
Kai, A., & Mingrui, X. (2012). A Simple Algorithm for Solving Travelling Salesman Problem. Instrumentation, Measurement, Computer, Communication and Control (IMCCC), 2012 Second International C
onference on. pp. 931-935. IEEE.
Karaboga, D. (2005). An idea based on honey bee swarm for numerical optimization. Technical report-tr06, Erciyes University, engineering faculty, computer engineering department.
Karp, R. M. (1972). Reducibility among combinatorial problems. Complexity of Computer Computations. Springer US. pp. 85-103.
Keeton, K., Kelly, T., Merchant, A., Santos, C. A., Wiener, J. L., Zhu, X., & Beyer, D. (2007). Don't Settle for Less Than the Best: Use Optimization to Make Decisions. HotOS.
Kennedy, J. & Eberhart, R. (1995). Particle swarm optimization. Neural Networks, 1995. Proceedings of IEEE International Conference, Vol. 4, pp. 1942-1948. Khajehzadeh, M., Taha, M. R., El-Shafie, A. & Eslami, M. (2011). A Survey on
Meta-Heuristic Global Optimization Algorithms. Research Journal of Applied Sciences, Engineering and Technology, Maxwell Scientific Organization, 3(6), pp. 569 - 578.
Khan, F. H., Khan, N., Inayatullah, S., & Nizami, S. T. (2009). Solving TSP problem by using genetic algorithm. International Journal of Basic & Applied Sciences, 9(10), 79-88.
Király, A., & Abonyi, J. (2010). A novel approach to solve multiple traveling salesmen problem by genetic algorithm. Computational Intelligence in Engineering. Springer Berlin Heidelberg. pp. 141-151.
74
Li, W. H., Li, W. J., Yang, Y., Liao, H. Q., Li, J. L., & Zheng, X. P. (2011). Artificial bee colony algorithm for traveling salesman problem. Advanced Materials Research, 314, pp. 2191-2196.
Liu, Y. H. (2008). Solving the probabilistic travelling salesman problem based on genetic algorithm with queen selection scheme. INTECH Open Access Publisher.
Liu, S. (2014). A powerful genetic algorithm for traveling salesman problem. arXiv preprint arXiv:1402.4699.
Luke, S. (2012). Essentials of Metaheuristics. Retrieved on June 01, 2013, from http://cs. gmu. edu/_sean/book/metaheuristics.
Malhotra, R., Singh, N. & Singh, Y. (2011). Genetic algorithms: Concepts, design for optimization of process controllers. Computer and Information Science,4(2), pp.39-54.
Malik, S., & Wadhwa, S. (2014). Premature Convergence In Genetic Algorithm Using Ellite Selection Scheme: Review Paper.
Matai, R., Singh, S. & Mittal, M. L. (2010). Traveling Salesman Problem: an Overview of Applications, Formulations, and Solution Approaches. Traveling Salesman Problem, Theory and Applications, InTech.
Maredia, A. (2010). History, Analysis, and Implementation of Traveling Salesman Problem (TSP) and Related Problems. Doctoral dissertation, University of Houston.
Miller, C. E., Tucker, A. W., & Zemli, R. A. (1960). Integer programming formulation of travelling salesman problem. Journal of the ACM (JACM), 7(4), pp. 326-329.
75
Nagata, Y., & Soler, D. (2012). A new genetic algorithm for the asymmetric traveling salesman problem. Expert Systems with Applications, 39(10), pp. 8947-8953.
Nallusamy, R. (2013). A new approach to solve multiple traveling salesman problems. Ph. D. Thesis.Anna University, Chennai, India.
Negnevitsky, M. (2011). Artificial intelligence: a guide to intelligent systems. Pearson Education.
Noraini, M. R., & Geraghty, J. (2011). Genetic algorithm performance with different selection strategies in solving TSP. Proceedings of the World Congress on Engineering. Vol 2.
Ouaarab, A., Ahiod, B., & Yang, X. S. (2014). Discrete cuckoo search algorithm for the travelling salesman problem. Neural Computing and Applications, 24
(7-8), pp. 1659-1669.
Panwar, P., & Gupta, S. (2013). Brief Survey of Soft Computing Techniques Used for Optimization of TSP. International Journal of Computer Science, 3(6), pp.
376-380.
Parsopoulos, K. E. & Vrahatis, M. N. (2010). Particle swarm optimization and Intelligence: advances and applications. pp. 1- 328.
Patrascu, M. (2015). Genetically enhanced modal controller design for seismic vibration in nonlinear multi-damper configuration. Proceedings of the Institution of Mechanical Engineers, Part I: Journal of Systems and Control
Engineering, 229 (2), pp. 158-168.
Pedro, O., Saldanha, R., & Camargo, R. (2013). A tabu search approach for the prize collecting traveling salesman problem. Electronic Notes in Discrete Mathematics, 41, pp. 261-268.
76
Pham, D., & Karaboga, D. (2012). Intelligent optimisation techniques: genetic algorithms, tabu search, simulated annealing and neural networks. Springer Science & Business Media.
Philip, A., Taofiki, A. A., & Kehinde, O. (2011). A genetic algorithm for solving travelling salesman problem. International Journal of Advanced Computer Science and Applications, 2(1).
Piszcz, A. & Soule, T. (2006). Genetic programming: Optimal population sizes for varying complexity problems. Proceedings of the Genetic and Evolutionary Computation Conference. pp. 953–954.
Pizlo, Z., Stefanov, E., Saalweachter, J., Li, Z., Haxhimusa, Y., & Kropatsch, W. G. (2006). Traveling salesman problem: A foveating model. Journal of Problem Solving, 1, pp.83–101.
Roeva, O., Fidanova, S., & Paprzycki, M. (2013). Influence of the population size on the genetic algorithm performance in case of cultivation process modelling. Computer Science and Information Systems (FedCSIS), 2013 Federated Conference, IEEE. pp. 371-376.
Royo, B., Sicilia, J. A., Oliveros, M. J., & Larrodé, E. (2015). Solving a Long-Distance Routing Problem using Ant Colony Optimization. Appl. Math, 9(2L), 415-421.
Rylander, S. G. B. (2002). Optimal population size and the genetic algorithm. Population, 100. No. 400, pp. 900.
Saleh, A. H. (2014). Constraint reasoning with local search for continuous optimization. Faculdade de Ciências e Tecnologia, Universidade Nova de Lisboa. The European Master’s Program in Computational Logic Masters Thesis.
77
Sallabi, O. M., & El-Haddad, Y. (2009). An Improved Genetic Algorithm to Solve the Traveling Salesman Problem. Proceedings of World Academy of Science: Engineering & Technology, 52.
Schrijver, A. (2003).Combinatorial optimization: Polyhedral and efficiency. Vol. 24. Springer Verlag.
Senaratna, N. I. (2005). Genetic algorithms: The crossover-mutation debate. Degree of Bachelor of Computer Science of the University of Colombo.
Šeda, M. (2015). Computational Geometry and Heuristic Approaches for Location Problems. International Conference of Electrical, Automation and Mechanical Engineering (EAME 2015).
Singh, S., & Lodhi, E. A (2013). Study of Variation in TSP using Genetic Algorithm and Its Operator Comparison. International Journal of Soft Computing and Engineering (IJSCE), 2231-2307.
Singh, A., & Singh, R. (2014). Exploring Travelling Salesman Problem using Genetic Algorithm. International Journal of Engineering Research & Technology. 3(2),ISSN 2278-0181.
Sivanandam, S. N., & Deepa, S. N. (2007). Principle of Soft Computing. John Wiley & Sons.
Sivaraj, R., & Ravichandran, T. (2011). A review of selection methods in genetic algorithm. International journal of engineering science and technology, 3(5), pp. 3792-3797.
Sur, C., Sharma, S., & Shukla, A. (2013). Solving Travelling Salesman Problem Using Egyptian Vulture Optimization Algorithm–A New Approach.
Language Processing and Intelligent Information Systems, 7912, pp. 254-267. Springer Berlin Heidelberg.