Volume 2012, Article ID 753916,21pages doi:10.1155/2012/753916
Research Article
On Solving Systems of Autonomous
Ordinary Differential Equations by Reduction to
a Variable of an Algebra
Alvaro Alvarez-Parrilla,
1, 2Mart´ın Eduardo Fr´ıas-Armenta,
3Elifalet L ´opez-Gonz ´alez,
4and Carlos Yee-Romero
11Facultad de Ciencias, Universidad Aut´onoma de Baja California, Km. 103 Carretera Tijuana-Ensenada,
22860 Ensenada, BC, Mexico
2Grupo Alximia SA de CV, Departamento de Investigaci´on, Ryerson 1268, Zona Centro,
22800 Ensenada, BC, Mexico
3Departamento de Matem´aticas, Universidad de Sonora, 83000 Hermosillo, SON, Mexico
4Divisi´on Multidisciplinaria de la UACJ en Cuauht´emoc, Universidad Aut´onoma de Ciudad Ju´arez,
32310 Ciudad Ju´arez, CHIH, Mexico
Correspondence should be addressed to Alvaro Alvarez-Parrilla,[email protected] Received 26 March 2012; Accepted 16 May 2012
Academic Editor: Mihai Putinar
Copyrightq2012 Alvaro Alvarez-Parrilla et al. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
A new technique for solving a certain class of systems of autonomous ordinary differential equations overKnis introducedKbeing the real or complex field. The technique is based on two observations:1, ifKnhas the structure of certain normed, associative, commutative, and with a unit, algebrasAoverK, then there is a scheme for reducing the system of differential equations to an autonomous ordinary differential equation on one variable of the algebra;2a technique, previously introduced for solving differential equations overC, is shown to work on the class mentioned in the previous paragraph. In particular it is shown that the algebras in question include algebras linearly equivalent to the tensor product of matrix algebras with certain normal forms.
1. Introduction
Throughout this work,Kwill stand for a field, usually the realRor the complex fieldC. Consider the autonomous ordinary differential equation
dx
dt fx, x∈Ω⊂K
n, t∈R, 1.1
In general the solution is not easy to obtain since this is usually a system of coupled differential equations. There is a vast literature regarding the solution of ordinary differential equations by different means and in particular by techniques utilizing generalized
analytic functions, see for instance1–14. These include applications to the three-dimensional Stokes problem, solutions of planar elliptic vector fields with degeneracies, the Dirichlet problem, multidimensional stationary Schr ¨odinger equation, among others3,5,6,12,13. In particular, the technique that we present is of interest for people working on vector fields with singularities. For instance, in order to gain insight into the behaviour of analytic vector fields, correct visualization of vector fields in the vicinity of their singular set is required, in the case of visualization of two-dimensional complex analytic vector fields with essential singularities the usual methods only provide partial resultssee15–17, whilst the technique which we promote provides accurate and correct solutions18,19. These questions arise naturally in discrete and continuous dynamical systemssee20–22.
As a first step in obtaining a solution to1.1, we notice that, ifKn can be given the structure of a certain algebraA, it is possible to reduce this system to a single autonomous differential equation
dζ
dt gζ, ζ∈Ω
⊂A, t∈R, 1.2
withgbeing a functionA-differentiable with respect to the variableζin the algebraA. Having done so, we proceed to show that it is possible to solve1.2by extending a geometric technique introduced in18,19in the context of complex analytic vector fields related to Newton vector fields which are first studied by 23. This technique is based upon the construction of two functions, which, are respectively, constant and linear on the trajectories which are the solutions of1.2.
The paper is organized as follows. In Section2the algebras in question are introduced, in particular we introduce the notion of normed, associative, commutative, and with a unit, finite dimensional algebraAoverK, showing in Section2.1that these have a first fundamental
representation into the algebra ofn×nmatrices overK,Mn,K. Furthermore in Section2.2
normal algebras are defined and their corresponding tensor products are constructed. This is
standard material which can be found in24–26but is presented here for completeness. In Section3we give the definition ofA-differentiability, and proceed to show that if the family of matrices {Jfx : x ∈ Ω} is linearly equivalent to a subset of an algebra B inMn,K, that is, the image of the first fundamental representation of an algebraAwith respect to the canonical basis ofKn, that is,BRA, then in factfisA-differentiable onΩ. The problem of determining if a mapf :Ω⊂Kn → KnisA-differentiable for some algebra
Ais treated indirectly in27, where the conditions that are given ensure the existence of an algebraAsuch that the set of relations are the generalized Cauchy-Riemann equations for
A,27,28show that these equations give a criterion forA-differentiability. Furthermore
In Section5we start by showing that in this context the differential equation1.1takes the form
dζ
dt gζ, ζ∈Ω
\ S ⊂A, t∈R, 1.3
withgbeing a functionA-differentiable with respect to the variableζin the algebraA, andS being a certain singular set, where the solutions are not defined.
We then proceed to show that the geometric technique, introduced in 18, 19, of finding two functionsh1andh2which are constant and linear on the trajectoriesζtwhich
are solutions of the differential equation, can be extended to the case of 1.3. We end the section and the paper with an example.
2. Algebras
We introduceK-algebrassee, e.g.,24.
Definition 2.1. A K-algebra or algebra over K is a finite dimensionalK-linear spaceA on which is defined a bilinear mapA×A → Athat is associative and commutative, and there is a unit elementeeAinAthat satisfiesexxexfor allx∈A.
An element a ∈ A is called regular if there exist a unique element inAdenoted by a−1∈Acalled inverse ofasuch thata−1aaa−1e. An elementa∈Awhich is not regular is called singular. Ifa, b∈Aandbis regular, the quotienta/bwill meanab−1.
2.1. Algebras and Their Fundamental Representations
We define the first fundamental representation.
IfB{β1, . . . , βn}is an ordered basis of an algebraA, the product between the elements ofBis given by
βiβj n
k1
cijkβk, 2.1
where cijk ∈ K for i, j, k ∈ {1,2, . . . , n} are called the structure constants of A. The first
fundamental representation ofAassociated toBis the isomorphismR:A → Mn,Kdefined by
Rx1β1 x2β2 · · · xnβn
x1R1 x2R2 · · · xnRn, 2.2
whereRiis the matrix whose entryj, kiscijkfori1,2, . . . , n. The commutativity and the associativity ofAare equivalent to the identities
1cijk cjik, for alli, j, k∈ {1,2. . . , n}and
2lcijlclkslcjklcils, for alli, j, k, s∈ {1,2. . . , n},
UsingR we assign toAthe norm induced from the operator norm inMn,K see
24. In this way each algebra is a normed algebra, that is, there exists a norm · :A → R satisfyingxy ≤ xyfor allx, y∈Aande1.
Example 2.2. Let A be the linear space R3 with the product between the elements of the
standard basisB{e1, e2, e3}given in the following equation:
e1 e2 e3
e1 e1 e2 e3
e2 e2 −2e1 2e2 e3 −e1 e2 e3
e3 e3 −e1 e2 e3 −e1 2e3
, 2.3
that extends to the product inR3given by
x, y, zu, v, w e1x, e2y, e3z
e1u, e2v, e3w
xue1e1 xve1e2 xwe1e3 yue1e2 yve2e2
ywe2e3 zue1e3 zve2e3 xwe3e3
xu−2yv−yw−zv−zwe1
xv−yu−zyv−yw zve2
zw zu yv yw zv zwe3.
2.4
The product between the elements ofBdefine the structure constantscijk fori, j, k ∈
{1,2,3}. So,R3with the product given is an algebraA.
2.2. Normal Algebras and Their Tensor Products
LetB1, B2, . . . , Blbe matricesBi∈Mki,K, eachBiof one the following four types:
r,
⎛ ⎜ ⎜ ⎜ ⎜ ⎜ ⎜ ⎝
s 0 0 · · · 0
1 s 0 0
0 1 s 0
..
. . .. 0 0 0 · · · s
⎞ ⎟ ⎟ ⎟ ⎟ ⎟ ⎟ ⎠ ,
a −b b a , ⎛ ⎜ ⎜ ⎜ ⎜ ⎜ ⎜ ⎝
C 0 0 · · · 0
I2 C 0 0
0 I2 C 0
..
. . ..
0 0 0 · · · C
⎞ ⎟ ⎟ ⎟ ⎟ ⎟ ⎟ ⎠
, 2.5
where
C
u −v v u
, I2
1 0 0 1
r, s, a, b, u, v∈Kandk1 · · · kln. In this case we will say that the matrixBgiven by
B
⎛ ⎜ ⎜ ⎜ ⎝
B1 0 · · · 0
0 B2 0
..
. . .. 0 0 · · · Bl
⎞ ⎟ ⎟ ⎟
⎠, 2.7
is in its normal form. We will associate toBan algebra of matrices of dimensionnoverKwhich containsBand use the following nomenclature: The first block will be called real simple block, the second real Jordan block, the third simple complex block, and the fourth complex Jordan block.
For i 1,2, . . . , l, let σi : Mki,K → Mn,K be the linear sections defined by substituting the matrixM ∈ Mki,Kin the block Bi of the matrix Band taking the other entries as zero. The real Jordan block may be written in the following wayBi aiDi Ni, whereDi is the identity andNi is a nilpotent matrix of orderki. The simple complex block may be written in the formBi aiDi biJi, whereDiis a diagonal matrix andJi is a matrix withJ2
i −Di. The complex Jordan blocks may be written in the formBi aiDi biJi Ni, whereDiis the identity andJiis a matrix withJi2 −DiandNiis a nilpotent matrix of order
ki/2.
We define the matrices{βi,j : 1≤i≤l, 1≤j ≤ki}whose entries are in the blockBias follows.
iIfBiis a real simple block,βi,1:σi1, in this caseki1.
iiIfBiis a real Jordan block,βi,1:σiDiandβi,j :σiNij−1forj2, . . . , ki.
iiiIfBiis a simple complex block,βi,1:σiDiandβi,2:σiJi.
ivIfBi is a complex Jordan block,βi,1 :σiDi,βi,2 :σiJi,βi,2j−1 :σiN2ij−1, and
βi,2j:βi,2σiNi2j−1forj2, . . . , ki/2.
Observe that the product of the matricesβi1,j1andβi2,j2is the zero matrix ifi1/i2. The
products ofβi,j1andβi,j2fori1, . . . , lare as follows.
iIfBiis a real simple block,βi,1βi,1βi,1.
iiIfBiis a real Jordan block, then
βi,1 βi,j1
βi,1 βi,1 βi,j1
βi,j2 βi,j1 βi,j1 j2
, 2.8
for 2≤j1, j2≤ki, whereβi,j10 whenj1≥ki 1.
iiiIfBiis a complex simple block, then
βi,1 βi,2
βi,1 βi,1 βi,2
βi,2 βi,2 −βi,1
ivIfBiis a complex Jordan block, then
βi,1 βi,2 βi,2j1−1 βi,2j1
βi,1 βi,1 βi,2 βi,2j1−1 βi,2j1
βi,2 βi,2 −βi,1 βi,2j1 −βi,2j1−1
βi,2j2−1 βi,2j2−1 βi,2j2 βi,2j1 j2−1−1 βi,2j1 j2−1
βi,2j2 βi,2j2 −βi,2j2−1 βi,2j1 j2−1 −βi,2j1 j2−1−1
, 2.10
for 2≤j1, j2≤ki/2, whereβi,j 0 whenj ≥2ki 1.
The commutativity of the elements in the set
Bβ1,1, . . . , β1,k1, . . . , βl,1, . . . , βl,kl
, 2.11
with respect to the matrix product, follows from the well-known result: For a Jordan canonical formD Nthe diagonal matrixDcommutes with the nilpotent matrixN.
Moreover, the K-linear space spanned by B is an K-algebra, as is claimed in the following proposition.
Proposition 2.3. The setB:{β1,1, . . . , β1,k1, . . . , βl,1, . . . , βl,kl}is a base for an n-dimensional linear
space which is an algebraAwith respect to the matrix product, and its first fundamental representation
Rwith respect toBis the identity isomorphism.
Proof. LetRbe the first fundamental representation ofAassociated toB. As the algebraAis generated byβi,1,βi,2considered only when this exists, i.e.,ki ≥2, andβi,3considered only
in the case whenBi is a Jordan complex block, in order to prove thatRis the identity, we only need to prove thatRβi,j βi,j, but for these three cases the equality is trivial. So,Ris the identity isomorphism.
Definition 2.4. Given a matrixB ∈ Mn,Kin its normal form, one will call the algebra in Mn,K, as constructed above, anK-normal algebra (containingB).
Definition 2.5. Two matrix algebrasA1andA2inMn,Kare linearly equivalent if there exists an invertible matrixB∈Mn,Ksuch thatA1{BAB−1:A∈A2}.
For a proof of the following result, see30.
Proposition 2.6. LetAandBbe algebras. There exists a product inA⊗Bsatisfying
a1⊗b1a2⊗b2 a1a2⊗b1b2, 2.12
where a1a2 and b1b2 denote the products in Aand B, respectively. The product is associative and
eA⊗eBeA⊗B.
Therefore, the finite tensor product of algebras is an algebra.
As usual, if the context is clear, one will drop theCfrom the name and refer to the
C-normal algebra just as a normal algebra. The following proposition and its corollary follow from a straightforward calculation.
Proposition 2.8. LetAandBbep- andq-dimensional matrix algebras inMn,KandMm,K, respectively, andP∈Mn,KandQ∈Mm,Kbe invertible matrices. Then, one has
PAP−1⊗QBQ−1 P⊗QA⊗BP⊗Q−1. 2.13
Corollary 2.9. The tensor product of matrix algebras linearly equivalent to normal algebras is
algebras which are linearly equivalent to the tensor product of normal algebras.
So, by Corollary2.9the algebras linearly equivalent to the tensor product of normal algebras are closed under the tensor product.
The following result shows that the first fundamental representation, with respect to an appropriate base, of a tensor product of normal algebras is the inclusion of the algebra in the corresponding matrix space.
Proposition 2.10. LetAandBbep- andq-dimensionalK-algebras, andR1 :A → Mp,Kand
R2 :B → Mq,Kbe first fundamental representations associated to the basisA{α1, . . . , αp}and
B {β1, . . . , βq}, respectively. Then,R :A⊗B → Mpq,Kdefined byR R1⊗R2is the first
fundamental representation ofA⊗Bassociated to the base{αi⊗βj: 1≤j≤p, 1≤j≤q}.
Proof. Let{α1, . . . , αp}be a base ofAand let{β1, . . . , βq}be a base ofB. We use the notations
CiandGjfor the matricesR1αiandR2βj, respectively, for 1≤i≤p, 1≤j≤q. The set
αi⊗βj : 1≤i≤p, 1≤j≤q
2.14
is a base forA⊗Bsee30. In order to find the structure constants ofA⊗Bwe take the products
αi⊗βl
αj⊗βs
αiαj⊗βlβs
p
k1
cijkαk
⊗
q
t1
dlstβt
p
k1 q
t1
cijkdlst
αk⊗βt
,
2.15
from which we obtain a first fundamental representationRofA⊗B, whereRαi⊗βlis the matrixHilwhose entrykl, jsis given byhil,kt,js:cijkdlst, wherecijk anddlstare the entries
On the other hand we have thatR1αi⊗R2βl Ci⊗Gl. The tensor product ofCiand
Glis given by
Ci⊗Gl
⎛ ⎜ ⎜ ⎜ ⎜ ⎜ ⎜ ⎜ ⎜ ⎜ ⎜ ⎜ ⎜ ⎜ ⎜ ⎜ ⎜ ⎜ ⎜ ⎜ ⎜ ⎜ ⎜ ⎜ ⎜ ⎜ ⎜ ⎜ ⎜ ⎜ ⎜ ⎜ ⎜ ⎝
ci11 ⎛ ⎜ ⎜ ⎜ ⎜ ⎜ ⎜ ⎜ ⎜ ⎝
di11 di21 . . . diq1
.. .
di1q di2q . . . diqq
⎞ ⎟ ⎟ ⎟ ⎟ ⎟ ⎟ ⎟ ⎟ ⎠
· · · cip1 ⎛ ⎜ ⎜ ⎜ ⎜ ⎜ ⎜ ⎜ ⎜ ⎝
di11 di21 . . . diq1
.. .
di1q di2q . . . diqq
⎞ ⎟ ⎟ ⎟ ⎟ ⎟ ⎟ ⎟ ⎟ ⎠ .. .
ci1p
⎛ ⎜ ⎜ ⎜ ⎜ ⎜ ⎜ ⎜ ⎜ ⎝
di11 di21 . . . diq1
.. .
di1q di2q . . . diqq
⎞ ⎟ ⎟ ⎟ ⎟ ⎟ ⎟ ⎟ ⎟ ⎠
· · · cipp
⎛ ⎜ ⎜ ⎜ ⎜ ⎜ ⎜ ⎜ ⎜ ⎝
di11 di21 . . . diq1
.. .
di1q di2q . . . diqq
⎞ ⎟ ⎟ ⎟ ⎟ ⎟ ⎟ ⎟ ⎟ ⎠ ⎞ ⎟ ⎟ ⎟ ⎟ ⎟ ⎟ ⎟ ⎟ ⎟ ⎟ ⎟ ⎟ ⎟ ⎟ ⎟ ⎟ ⎟ ⎟ ⎟ ⎟ ⎟ ⎟ ⎟ ⎟ ⎟ ⎟ ⎟ ⎟ ⎟ ⎟ ⎟ ⎟ ⎠
, 2.16
from which we see that in the positionkt, jsthe elementcijkdlstappears. Thus, we have the equalities of matricesHilCi⊗Gl, for 1≤i, l≤n. Therefore,RR1⊗R2.
Corollary 2.11. IfAis a matrix algebra inMn,Kwhich is a tensor product ofK-normal algebras, then there exists a baseBofAin which the corresponding first fundamental representationR:A → Mn,Kis the identity isomorphism, that is,Rx xfor allx∈A.
Proof. We have that A B1 ⊗ · · · ⊗ Bm, where Bi is a K-normal algebra for every i ∈
{1, . . . , m}. Obviously, for everyi ∈ {1, . . . , m} we can consider a base forBi as that given in Proposition2.3, and taking the corresponding tensor products of these basis we obtain a baseBforA. By Propositions2.3and2.10we have that the first fundamental representation ofAassociated toBis the identity.
3. Differentiability on Algebras
In a paper published in 1893, Sheffers laid a foundation for a theory of analytic functions on algebras, see27,29and references therein.
Differentiability on algebras is a stronger concept than the usual differentiability over
Kn. Iff : U ⊂ Kn → Knis a differentiable map in the open setU, we denote byJfxits Jacobian matrix at the pointx, in the standard base ofKn. We also use the notationJ
Bfxfor
The following definition was introduced in26.
Definition 3.1. LetAbe an algebra and letf :Ω⊂A → Abe a map defined in the open set
Ω. One says thatfisA-differentiable atx0∈Aif there exists an elementfx0∈A, which one
calls theA-derivative of fatx0, satisfying
lim h→0
fx0 h−fx0−fx
0h
h 0, 3.1
where fx0hdenotes the product in Aof fx0 withh. If f isA-differentiable at all the
points ofΩ, one says thatfisA-differentiable onΩand one calls the mapfassigningfxto the pointx∈ΩtheA-derivative of f, or Lorch derivative of f.
It followssee, e.g.,26–29that a mapf:Ω⊂A → AisA-differentiable atx0if and
only ifJBfx0∈RAand is continuous as a function ofx0, whereB:{e1, . . . , en}is a base ofAandR:A → Mn,Kis the first fundamental representation of the algebraAassociated toB.
In fact, in this case,JBfxis the image of fxunder the map R, that is, iff isA -differentiable, then
JBfx
n
i1
uixRi, 3.2
whereRiReiandui:Ω → Kfori1,2, . . . , n.
IfΩ:RΩ,B:RA, andg:Ω⊂B → Bis defined by
gyR◦f◦R−1y, 3.3
thengisB-differentiable and its differential atyis given bygy ni1uiR−1yRi, thus, the relation between the Jacobian matrix offand theB-differential ofgisJBfx gRx.
The matrix equation3.2is equivalent to then2equations
∂fi
∂xj n
l1
ulclji, 3.4
for alli, j∈ {1,2, . . . , n}. Using3.4and the associativity of the algebra, we can obtain
n
i1
ciks
∂fi
∂xj n
i1
cijs
∂fi
∂xk
, 3.5
appearing in29, p. 646.
Suppose we consider a basisA{α1, . . . , αn}ofA, whereαinj1sjiejfori1, . . . , n,
sji∈K, it can be proved thatJAfS−1JfS, whereS sij. If we denote bySithe image of
αiunder the first fundamental representation ofAassociated toA, we have fori 1, . . . , n, thatSiS−1
n
j1sjiRjS.
Remark 3.3. For the differentiation of algebras the usual properties of differentiation of functions from Rn to Rm remain true. Furthermore, the usual rules of differentiation of functions of one variable are satisfied in the case of algebras, therefore polynomial functions, rational functions, and those expressed by means of convergent power series as the exponential, trigonometric, and other usual functions are differentiable in algebras.
The following theorem gives conditions that ensure the existence of an algebraAin whichfisA-differentiable.
Theorem 3.4. Letf:Ω⊂Kn → Knbe aC1map defined in the open setΩ.fisA-differentiable for
an algebraAif and only if the set of matrices
Jfx:x∈Ω 3.6
is a subset of an algebraBwhich is linearly equivalent to an algebraTwhich is a finite tensor product of normal algebras inMn,K. Moreover,Ais aK-linear spaceKn and has a baseBsuch that the
image of the first fundamental representation ofAassociated toBisRA T.
Proof. Let A {α1, . . . , αn} be a base for T as given in Corollary 2.11. Then B
{Bα1B−1, . . . , BαnB−1} is a base forB, where B is a matrix such that B BTB−1. Because
Jfx ∈Bfor everyx∈Ω, we haveJfx in1uixβi, whereui :Ω → Kare functions andβiBαiB−1.
Now consider the baseG{γ1. . . , γn}ofKndefined byγinj1bjiej, whereB bij and{e1, . . . , en}is the standard base ofKn. Then, we have thatJGfB−1JfB. Thus,
JGfx B−1
n
i1
uixβi
BB−1
n
i1
uix
Bα1B−1
B
n
i1
uixαi,
3.7
in other wordsJGfx ∈T, which means that if we define a product between the elements ofGusing the structure constants of the products of the elements ofA, we have thatKn is an algebraAsuch that its first fundamental representation associated toG is that given by Rγi αifori1, . . . , n. ThereforefisA-differentiable.
4. Reduction to a Variable in the Algebra
Sometimes f f1, . . . , fn : Ω ⊂ Kn → Kn can be expressed as a function of a variable
Proposition 4.1. With the same hypothesis as Theorem3.4, there exists a basisD{δ1, . . . , δn}of
invertible elements of the algebraAsuch that the following diagram commutes
Ω⊂Kn −→f Kn
A↓ ↓A
Ω⊂A −→g A,
4.1
whereAis the matrix associated to the change of basisE → D, whereE{e1, . . . , en}is the canonical
basis ofKn.
Proof. By a change of basis one has the following commutative diagram
Ω⊂Kn −→f Kn
B↓ ↓B
Ω⊂A g
−→ A,
4.2
whereBis the matrix associated to the change of basis fromEtoB, which was used in the previous theorem, and g B◦ f ◦B−1. Now consider a base D {δ1, . . . , δn} of regular elements ofA, where without loss of generalityδ1 e. Then ifAis the matrix associated to
the change of basis fromEtoD, letgA◦f◦A−1. Note that the domain ofgisΩAΩ.
Theorem 4.2. Let f : Ω ⊂ Kn → Kn be a A-differentiable map over an algebra A with first
fundamental representationRA, thengA◦f◦A−1can be expressed in a variableζnj1yjδj,
for some regular basisD {δ1, . . . , δn}. Moreover there is a partial differential operator∂/∂ζsuch
thatgζ ∂g/∂ζ ζ.
Proof. By Proposition4.1there is a basisD {δ1, . . . , δn}of regular elements of the algebra
A, withδ1 e, without loss of generality we may assume that||δj|| 1. Introducing the variableζin the baseDasζ ni1yiδi
n
i1xiei, we then havefx1, . . . , xn gζ, with
gA◦f◦A−1, whereAis the matrix associated to the change of basisEtoD.
Denote byζkthe k-conjugate ofζrelated toD, which is defined fork2, . . . , nby
ζky1δ1−ykδk n
j2
j /k
yjδj
−ykδk n
j1
j /k
yjδj ζ−2ykδk.
4.3
Then we have
yke
ζ−ζk 2 δ
−1
and since
y1δ1ζ−
n
j2
yjδj ζ− n
j2
ζ−ζj
2 , 4.5
then,
y1e
1 2
⎛
⎝3−nζ n
j2
ζj
⎞
⎠δ−1
1 . 4.6
Furthermore one can define the differential operators
∂ ∂ζ 1 n n j1
δ−1j ∂ ∂yj
, 4.7
∂ ∂ζk
1
2
δ1−1 ∂ ∂y1 −δ
−1
k
∂ ∂yk
, fork2, . . . , n, 4.8
which satisfy
∂ζ ∂ζ 1
∂ζk
∂ζ
n−2
n fork2, . . . , n,
∂ζk ∂ζk 1 ∂ζ ∂ζk ∂ζj ∂ζk
0 fork2, . . . , n, k /j.
4.9
IffisA-differentiable,gis alsoA-differentiable, hence
gζ dg
dtζ tδk|t0 dg
dt
ζ tδj
|t0, ∀j, k, 4.10
and since
dg
dtζ tδk|t0δ
−1
k
∂g ∂yk
ζ, 4.11
then fork2, . . . , n
∂g ∂ζk ζ 1 2 n i1
δ−11 ∂gi ∂y1ζ−δ
−1
k
∂gi
∂ykζ
δi0, 4.12
so the right hand expression of gζ ni1giζδi does not depend on the conjugated variables. In this way we obtain an expressiongζdepending only onζ, and not onζk for
Moreover, by4.7,4.10, and4.11one has that
gζ ∂g ∂y1
ζ ∂g
∂ζζ. 4.13
In the following example we show how we can reduce the variables of a map by substituting for variables in an algebra.
Example 4.3. Letfx1, x2, x3 x21,2x1x2, x22 2x1x3. Then
Jf
⎛
⎝22xx12 20x1 00
2x3 2x2 2x1 ⎞
⎠, 4.14
theJf is in normal form, hencefisA-differentiable. If
N
⎛ ⎝0 0 01 0 0
0 1 0
⎞
⎠ 4.15
and I is the identity, the multiplication in the associated algebra RA is given by multiplication of matricesI, N, andN2 representing, respectively,Re
1, Re2,andRe3,
whereE {e1, e2, e3}is the canonical basis ofR3. It is easy to see thate2ande3do not have
inverse in the algebraA. Consider the basis of regular elements
D{δ1e1, δ2e1 e2, δ3e1 e3}, 4.16
we see that the matrix associated to the change of basis fromEtoDis
A
⎛
⎝10 1−1 −01
0 0 1
⎞
⎠, 4.17
sofis transformed togA◦f◦A−1,
gy1δ1 y2δ2 y3δ3
y12−2y22−2y2y3−y32
δ1
2y2
y1 y2 y3
δ2
y22 2y3
y1 y2 y3
δ3.
4.18
Thus
is the variable in the algebraA. Now consider the conjugates
ζ2y1δ1−y2δ2 y3δ3, ζ3y1δ1 y2δ2−y3δ3. 4.20
Then
y1e 1
2
ζ2 ζ3
δ1−1,
y2e
1 2
ζ−ζ2
δ−12 ,
y3e
1 2
ζ−ζ3
δ−13 ,
4.21
so by substituting this ingand simplifying we obtain
gζ ζ2, 4.22
the function in the variable of the algebra.
5. Solving Systems of Ordinary Differential Equations by
Reduction to One Variable on an Algebra
By following18,19, we obtain, as direct corollaries of Theorem3.4, Proposition4.1, and Theorem4.2, the following results.
Corollary 5.1. Let
f:Ω⊂Rn−→Rn,
g:Ω⊂A−→A, 5.1
be as in Theorem4.2. Then there existsΦ:Ω⊂A → Awhich isA-differentiable onΩ\ S, whereS is a singular set, such that
gζ −Φζ Φζ,
fx −Jφx−1φx,
5.2
withφx Φ◦Ax.
Proof. We need to show that there existsΦ:Ω⊂A → Asuch that
gζ −Φζ
Noticing that
logΦζ Φζ
Φζ −
1
gζ, 5.4
and by Remark3.3, it follows that
Φζ exp
−
ζ
dz
gz
, 5.5
forζ∈Ω\ S, where
Sζ∈Ω:gζ∈/A∗, 5.6
withA∗being the regular elements ofA.
Remark 5.2. Note thatScan be many things. For instance ifgζ cζwithc /∈A∗, thenSA. On the other hand, ifgζis the polynomial functiongζ cnζn · · · c1ζ c0withcnsingular, thengζmay be regular for allζ∈A,see26, p. 418, in which caseS∅.
Remark 5.3. As a special case one notices that ifA Cthen 1/gwill be a complex analytic function onΩ\ ShenceSconsists of isolated pointsthe isolated singularities of 1/g. This has been studied in18,19.
Remark 5.4. In case thatS/ Ω, thenΩ\ Sis an open dense set inΩ. This is true since the set
A∗is an open dense set inAhence for a continuousgone has thatg−1A∗is an open dense
subset ofΩ.
Remark 5.5. By the previous remark, in case thatS/ Ω, thenΦζexists forζ ∈Ω\ Seven though it might be a multivalued function defined on each component ofζ∈Ω\ S.
Remark 5.6. Further characterization and properties ofSwill be studied elsewhere. In what follows we assume thatS/ Ω.
Letx x1, x2, . . . , xn∈Rn\ {0}, then consider the projection ontoSn−1
x x
x ∈S
n−1. 5.7
Corollary 5.7. Letf : Ω ⊂ Rn → Rn beA-differentiable in an algebra with first fundamental
representationRA. Then the solutions to the differential equation,
dx
correspond to the level curves of the function
h1x Π
φx, 5.9
moreover the real-valued function,
h2x logφx, 5.10
is a linear function oftalong the solutionsxtof5.8.
Proof. By Theorem 3.4, Proposition 4.1, and Theorem 4.2, the solutions xt of 5.8 are in correspondence with the solutionsζtof
dζ
dt gζ. 5.11
On the other hand, Corollary5.1shows that
Φζt Φζt0exp−t−t0, 5.12
the result follows immediately by applyingΠ·and log · to5.12.
Corollary 5.8. In particular, to visualize the trajectory that passes through the pointx0 ∈Ω\A−1S
at timet0 ∈ R, one needs only to plot the level curve{x∈Ω :h1x h1x0}. Moreover one can
find explicitly the pointxt1, fort1∈R, as the intersection of the level curveh1x h1x0and the
hypersurfaceh2x h2x0−t1 t0.
Example 5.9. Consider the function
fx, yux, y, vx, y, 5.13
where
ux, y 1 6
2 6x −22 20x 7y
4 5x2 8x−1 y y−4 5y
52 4x 5y
4 5x2 8x1 y y4 5y
,
vx, y 1 6
−4 6y− 5
−4 5x 4y
4 5x2 8x−1 y y−4 5y
4−7x−20y
4 5x2 8x1 y y4 5y
.
Let
A
1 2 2 1
, 5.15
and notice that
A·JfA−1x, y·A−1
ax, y bx, y
−bx, y ax, y
, 5.16
with
ax, y1− 2
x2 −2 y2
x−6 4x 3y
x2 −2 y22
x4x−32 y
x2 2 y22
− 2
x2 2 y2,
bx, y 4y
x4 −4 y22 2x24 y22
×48−96x−24x2−16x3−9x4 2x5 2−3 2x4 x2y2 3 2xy4 . 5.17
HenceA·JfA−1x, y·A−1 belongs to the normal algebraC, so the previous results are available.
Thus
gx, yA◦f◦A−1x, yu1
x, y, v1
x, y, 5.18
with
u1
x, y−1 x 6−4x−3y 2x2 −2 y2
6−4x 3y 2x2 2 y2,
v1
x, y x
−12 12x x3y 2−2 x2y3 y5
x4 −4 y22 2x24 y2
5.19
is just acomplexanalytic function, since
so by lettingzx iy, we have
gz u1
z z
2 , z−z
2i
iv1
z z
2 , z−z
2i
2−z2 z3
4 z2 . 5.21
By Corollary5.1one has
Φz exp
!
−
z
dζ
gζ
"
, 5.22
so that
Φz
z−1−i z−1 i
i
z 1−1 e
2 arctan1−z
z 1 . 5.23
Note that in R2 one has Πx, y expiArgx, y hence the level curves of Π· are in correspondence with the level curves of Arg·. So
hz ArgΦz −arctan y 1 x
1 2log
1− 4y
2 −2 xx y2 y
5.24
is a constant of motionhassociated togzand the one associated tofx, yis
hx, y h◦Ax, y −arctan
2x y 1 x 2y
1 2log
1− 4
2x y
2 5x2 y−2 5y x2 8y
.
5.25
So by Corollary5.8the trajectories associated to
xt, ytfxt, yt, 5.26
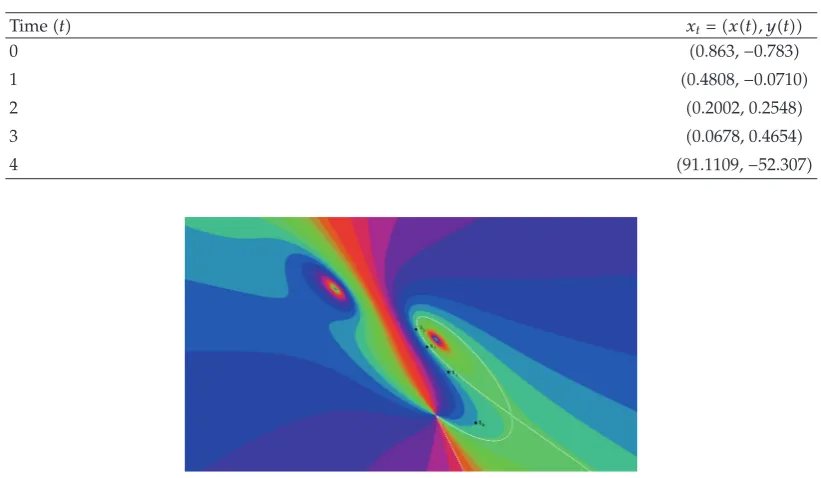
Table 1: Coordinates of the intersection of the level curveshx, y −1.68195 andh2x, y 2.26841−tfor
t0,1,2,3,4.
Timet xt xt, yt
0 0.863,−0.783
1 0.4808,−0.0710
2 0.2002, 0.2548
3 0.0678, 0.4654
4 91.1109,−52.307
Figure 1: Visualization of the trajectories of5.26. In this case we have plotted level bands ofhx, y, so that
the trajectories are in fact the boundaries between the colored bands. We have also plotted, in white, the trajectory that passes through a singular point corresponding to a pole of thecomplexanalytic function
gz. To exemplify the parametrization, we have plotted in black the points corresponding tot0,1,2,3
see Table1.
In order to parametrize the solution we need to calculateh2x, ywhich turns out to
be
h2
x, y −arctan
−1 x 2y
1−2x−y
arctan
1−x−2y
1 2x y
−1
2log
2x y2 1 x 2y2.
5.27
According to Corollary 5.8 we proceeded to calculate the intersection the level curves
hx, y −1.68195 and h2x, y 2.26841−t fort 0,1,2,3,4. The results are shown in
Table1and as black dots in Figure1.
Acknowledgments
[image:19.600.209.401.467.557.2]References
1 L. Bers, Theory of Pseudo-Analytic Functions, Institute for Mathematics and Mechanics, New York University, New York, NY, USA, 1953.
2 L. Bers, “An outline of the theory of pseudoanalytic functions,” Bulletin of the American Mathematical
Society, vol. 62, pp. 291–331, 1956.
3 M. D ¨uz and K. Koca, “A Dirichlet problem for generalized analytic functions,” Selc¸uk Journal of Applied
Mathematics, vol. 7, no. 1, pp. 9–15, 2006.
4 S. B. Klimentov, “BMO classes of generalized analytic functions,” Vladikavkazski˘ı Matematicheski˘ı
Zhurnal, vol. 8, no. 1, pp. 27–39, 2006.
5 V. Kravchenko, “On the relationship between p-analytic functions and Schr ¨odinger equation,”
Zeitschrift f ¨ur Analysis und ihre Anwendungen, vol. 24, no. 3, pp. 487–496, 2005.
6 A. Meziani, “Elliptic planar vector fields with degeneracies,” Transactions of the American Mathematical
Society, vol. 357, no. 10, pp. 4225–4248, 2005.
7 Le Thu Hoai and W. Tutschke, “Associated spaces defined by ordinary differential equations,”
Zeitschrift f ¨ur Analysis und ihre Anwendungen, vol. 25, no. 3, pp. 385–392, 2006.
8 W. Tutschke, “Interactions between partial differential equations and generalized analytic functions,”
Cubo, vol. 6, no. 1, pp. 281–292, 2004.
9 W. Tutschke, “Generalized analytic functions in higher dimensions,” Georgian Mathematical Journal, vol. 14, no. 3, pp. 581–595, 2007.
10 I. N. Vekua, Generalized analytic functions, Pergamon Press, Addison-Wesley, London, UK, 1962.
11 Z.-l. Xu, “Mixed elastico-plasticity problems with partially unknown boundaries,” Acta Mathematicae
Applicatae Sinica (English Series), vol. 23, no. 4, pp. 629–636, 2007.
12 M. Zabarankin and P. Krokhmal, “Generalized analytic functions in 3D Stokes flows,” The Quarterly
Journal of Mechanics and Applied Mathematics, vol. 60, no. 2, pp. 99–123, 2007.
13 M. Zabarankin, “The framework of k-harmonically analytic functions for three-dimensional Stokes flow problems. I,” SIAM Journal on Applied Mathematics, vol. 69, no. 3, pp. 845–880, 2008.
14 B. Ziemian, “Generalized analytic functions with applications to singular ordinary and partial differential equations,” Dissertationes Mathematicae (Rozprawy Matematyczne), vol. 354, 100 pages, 1996.
15 K. Hockett and S. Ramamurti, “Dynamics near the essential singularity of a class of entire vector fields,” Transactions of the American Mathematical Society, vol. 345, no. 2, pp. 693–703, 1994.
16 T. Newton and T. Lofaro, “On using flows to visualize functions of a complex variable,” Mathematics
Magazine, vol. 69, no. 1, pp. 28–34, 1996.
17 A. Garijo, A. Gasull, and X. Jarque, “Local and global phase portrait of equation ˙zfz,” Discrete
and Continuous Dynamical Systems A, vol. 17, no. 2, pp. 309–329, 2007.
18 A. Alvarez-Parrilla, A. G ´omez-Arciga, and A. Riesgo-Tirado, “Newton vector fields on the plane and on the torus,” Complex Variables and Elliptic Equations, vol. 54, no. 5, pp. 440–461, 2009.
19 A. Alvarez-Parrilla, J. Mucino-Raymundo, S. Solorza-Calderon, and C. Yee-Romero, Complex Analytic
Vector Fields: Geometry, Dynamics and Visualization, 2009.
20 H. E. Benzinger, “Julia sets and differential equations,” Proceedings of the American Mathematical Society, vol. 117, no. 4, pp. 939–946, 1993.
21 F. von Haeseler and H. Kriete, “The relaxed Newton’s method for rational functions,” Random and
Computational Dynamics, vol. 3, no. 1-2, pp. 71–92, 1995.
22 F. von Haeseler and H. O. Peitgen, “Newton’s method and complex dynamical systems,” Acta
Applicandae Mathematicae, vol. 13, no. 1-2, pp. 3–58, 1988.
23 S. Smale, “A convergent process of price adjustment and global Newton methods,” Journal of
Mathematical Economics, vol. 3, no. 2, pp. 107–120, 1976.
24 E. Kreyszig, Introductory Functional Analysis with Applications, John Wiley & Sons, 1978.
25 W. C. Brown, Matrices Over Commutative Rings, Marcel Dekker, New York, NY, USA, 1993.
26 E. R. Lorch, “The theory of analytic functions in normed Abelian vector rings,” Transactions of the
American Mathematical Society, vol. 54, pp. 414–425, 1943.
27 J. A. Ward, “From generalized Cauchy-Riemann equations to linear algebras,” Proceedings of the
American Mathematical Society, vol. 4, no. 3, pp. 456–461, 1953.
28 R. D. Wagner, “The generalized Laplace equations in a function theory for commutative algebras,”
Duke Mathematical Journal, vol. 15, pp. 455–461, 1948.
29 P. W. Ketchum, “Analytic functions of hypercomplex variables,” Transactions of the American
Mathematical Society, vol. 30, no. 4, pp. 641–667, 1928.
31 L. V. Ahlfors, Complex Analysis, An Introduction to the Theory of Analytic Functions of One Complex
Variable, McGraw-Hill, New York, NY, USA, 3rd edition, 1979.
32 R. E. Greene and S. G. Krantz, Function Theory of One Complex Variable, vol. 40 of Graduate Studies in
Mathematics, American Mathematical Society, Providence, RI, USA, 2nd edition, 2002.
Submit your manuscripts at
http://www.hindawi.com
Hindawi Publishing Corporation
http://www.hindawi.com Volume 2014
Mathematics
Journal ofHindawi Publishing Corporation
http://www.hindawi.com Volume 2014 in Engineering
Hindawi Publishing Corporation http://www.hindawi.com
Differential Equations
International Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporation
http://www.hindawi.com Volume 2014
Probability and Statistics Hindawi Publishing Corporation
http://www.hindawi.com Volume 2014
Journal of
Hindawi Publishing Corporation
http://www.hindawi.com Volume 2014 Mathematical PhysicsAdvances in
Complex Analysis
Journal of Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Optimization
Journal ofHindawi Publishing Corporation
http://www.hindawi.com Volume 2014
Combinatorics
Hindawi Publishing Corporation
http://www.hindawi.com Volume 2014 International Journal of
Hindawi Publishing Corporation
http://www.hindawi.com Volume 2014
Operations Research
Journal of
Hindawi Publishing Corporation
http://www.hindawi.com Volume 2014
Function Spaces
Abstract and Applied Analysis
Hindawi Publishing Corporation
http://www.hindawi.com Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporation http://www.hindawi.com Volume 2014
The Scientific
World Journal
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Hindawi Publishing Corporation
http://www.hindawi.com Volume 2014
Algebra
Discrete Dynamics in Nature and Society Hindawi Publishing Corporation
http://www.hindawi.com Volume 2014
Hindawi Publishing Corporation
http://www.hindawi.com Volume 2014
Decision Sciences
Discrete Mathematics
Journal ofHindawi Publishing Corporation
http://www.hindawi.com Volume 2014
Hindawi Publishing Corporation
http://www.hindawi.com Volume 2014