International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459,ISO 9001:2008 Certified Journal, Volume 3, Issue 9, September 2013)
561
Edge Detection and Object Tracing in Real Image Sequences
Using Gaussian Approximation with Graph-Cut Model
M. Sivakkumar
1, Dr. J.Vellingiri
2, S. Satheesh kumar
31,3
Assistant Professor, 2Associate Professor, Department of CSE, Kongunadu College of Engineering and Technology, Tamilnadu, India.
Abstract- In image segmentation process, edge enhancement is the important process where edge information can be utilized to acquire partitions analogous to actual objects, or significant parts of the objects in the image. Edge enhancement is normally done through filtering process. The filter can be employed as a pre-processing implementation in image segmentation. The previous work described only the image segmentation process using vector filtering approach for both layered and featured image and segment the image as vector field. The drawback of the previous work is that it did not involve in the edge enhancement process and had no technique to trace the moving object patterns in the segmented image to identify the motion and direction of object in the real image sequences. To enhance the process, in this work, we present a new adaptive nonlinear filter intended at smoothing the edges of the given real image sequences. Several special features are introduced to the filter, including Gaussian approximation with graph cut model to Evaluate the two or more image sequences with higher inter frame motion. Non-linear smoothening Filters are first applied on the pixels of the image to enhance the edge detection process. After non-linear filtering followed by image segmentation, the Tracing of growing/moving patterns of object is identified using Gaussian approximation with graph-cut model. An experimental evaluation is conducted with real image sequences samples to evaluate the effectiveness of the proposed edge detection and object tracking using Gaussian approximation with graph-cut model in terms of edge localization, object tracing speed, computation time for object tracing.
Keywords- Image segmentation, Non-linear filtering, Graph-cut model, Gaussian approximation, image sequences
I. INTRODUCTION
The significance of edges in image observation and computer vision is broadly familiar. Edge improvement is also practical in pre-processing of figure segmentation where edge information can be utilized to acquire divisions similar to real objects, or consequential parts of the objects in the image. Edge development and image leveling are regularly differing burden that cannot be sound addressed in the construction of linear filtering. While linear smoothing filters may answer in edge shape, it is frequently attractive to utilize nonlinear filters.
A generally subjugated design is to influence pixels in accordance with their confidence of being commissioned for the estimate. The distinction regularly arises from the mode the assurance is attained. In order statistic L-filter, subjective planned intensities in the neighborhood region are utilized to transform the pixel value. In edge-preserving smoothing filter, a position of neighborhood regions of the similar middle pixel is definite and the section having the minimum intensity variance is utilized to amend the centre pixel value. In nonlinear diffusion, weights are inversely proportional to the amount of the intensity slope at the presently practiced location.
Filters are easy numerical operators which, when convolved with fine logs or seismic or explanation data, underline some portion of the data, and de-emphasize others. This is a smoothing filter. Linear filters activate in the similar way on each input pixel, pertaining the similar weights to the similar pixels in the support. They are accordingly very fast, but not susceptible to the quality of the data, smoothing the whole lot uniformly. Non-linear filters conserve edges as they are adaptive.
Not each pixel in the support supplies to the output. The pixels that do supply are preferred by some geometric criterion, regularly something to do with how analogous the pixels are either to every other or to the input pixel. The benefit of this is that noisy pixels donate less to the output pixel, and edges are conserved or even improved.
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459,ISO 9001:2008 Certified Journal, Volume 3, Issue 9, September 2013)
562
Usually, hypothesis is made to restrain the tracking trouble in the framework of a particular application. In this work, to improve the object tracing and edge enhancement, a non-linear filtering approach is used for each pixel on the image to smoothen the edge of the given image. To identify the object moving patterns in the given image, the image should be segmented. In this work, the segmentation of image and the object tracing is done through Gaussian approximation in graph-cut model.
II. LITERATURE REVIEW
For image segmentation and object tracking
environment, many authors have presented techniques in a successful manner. In [1], initiate a probabilistic mainframe idea performance to follow monotonically proceeding boundaries of objects surrounded by image sequences. Our method includes a new technique for counting arithmetic prior shape information into graph-cut based segmentation, with the assist of a majorization minimization algorithm.
Both quick demonstration and level set methods have been practical for computationally recounting moving interfaces in a selection of physical applications. Recently used level sets to model cell motility [2]. For a set of image sequences, the technique used in [3] implemented for image sequences and there are some strategies which have been followed for the image tracking process [4].
For image segmentation, many techniques have been presented. In [5], the author used graph-cut model for image segmentation process to fragment the image based on the pixels applied through it. A Bayesian approach [6] is also being used for image segmentation. Segmentation is normally based on the shape of the image which is provided by the user. In [7], segmentation is presented by Semiautomatic segmentation with compact shape prior. A star shape prior [8] is also being used for image segmentation and has been processed well but the image quality is low.
A Gaussian markov model [9] is used for object tracing system which could be used by the image segmentation process.
A fast Bayesian method [10] for updating and forecasting the segmented image based on the process of qualifying the capabilities and abilities of the image properties. A kernel density estimation function [11] computed for estimation and intrinsic alignment for shape priors in level set segmentation. A mathematical model [12] used for the development of intercellular signaling during epithelial wound healing.
In this work, non-linear filtering strategy is implemented for the enhancement of the image quality improvement and the graph-cut model is used for image segmentation and the Gaussian approximation is used here for identifying the motion of the object in the given image.
III. EDGE DETECTION AND OBJECT TRACING IN REAL
IMAGE SEQUENCES USING GAUSSIAN APPROXIMATION
WITH GRAPH-CUT MODEL
The proposed work is efficiently implemented for smoothening edge and identifying the object tracing patterns using non-linear smoothening filters and Gaussian approximation with graph-cut model. The proposed edge
detection and object tracking using Gaussian
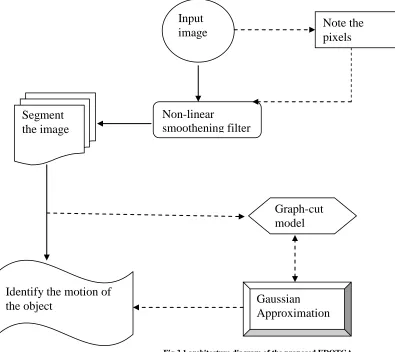
approximation with graph-cut model [EDOTGA] works under two different phases. The first phase is to enhance and smoothen the edges of the given image by applying on each pixel of the given image. The second phase is to identify the moving object / growing patterns in the given image after segmentation process is done through graph-cut model with Gaussian approximation. The architecture diagram of the proposed edge detection and object tracking using Gaussian approximation with graph-cut model [EDOTGA] is shown in the fig 3.1. The first step is to smoothen the edges of the given image by applying the novel adaptive non-linear smoothening filtering strategy. Non-linear filtering strategy is used to preserve the edges of the given image and it is very effective at removing the impulsive noise.
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459,ISO 9001:2008 Certified Journal, Volume 3, Issue 9, September 2013)
[image:3.612.48.443.145.497.2]563
Fig 3.1 architecture diagram of the proposed EDOTGA
Using the above fig 3.1, the motion objects are identified and efficiently smoothen the edges of the given image. The process of the non-linear filtering strategy and Gaussian approximation with graph-cut model are described in a series.
3.1 Non-filtering technique for edge enhancement
The non-linear filtering technique has been used here for enhancing the edge detection process [1]. Let the input image be f(a,b) be modeled as the superposition of three sections: the „consistent‟ part g1(a,b) , the structural part
(e.g. edges) g2(a,b) , and the „noise‟ part n(a,b) [1],
)
,
(
)
,
(
)
,
(
)
,
(
a
b
g
1a
b
g
2a
b
n
a
b
f
…… (Eqn 1)The nonlinear smoothing beneath deliberation is to discover the „best‟ estimation (beneath a chosen criterion), such that the outcome of the image fˆ (a, b) is the edge conserving smoothing of the original image
)
,
(
)
,
(
)
,
(
)
,
(
)
,
(
)
,
(
ˆ
2 1
a
b
kg
a
b
g
b
a
h
b
a
f
b
a
h
b
a
f
….. (Eqn 2)
Where h (a, b) is a smoothening filter
Is an operatorTo the structured image part, the preferred outcome from the filter is k g2(r), i.e., the filter sustains image structures
conversely permit a scale distinction. To the homogeneous image division, the preferred outcome of the filter is a local
province i dependent constant
h
(
a
,
b
)
g
1(
a
,
b
)
c
i.Input
image
Non-linear
smoothening filter
Note the
pixels
Segment
the image
Graph-cut
model
Identify the motion of
the object
Gaussian
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459,ISO 9001:2008 Certified Journal, Volume 3, Issue 9, September 2013)
564
Evidently, this is connected with a nonlinear filtering problem.
Let us consider the following criterion function
On a local image window D a , b centered at (a,b), for
examination, first assign numerous particular cases of linear filter, where
is a density.m
D b
a ab
b
a
f
b
a
f
b
a
,
' '
)
'
'
(
)
,
(
ˆ
)
,
(
…….(Eqn 3)For m = 2,
Estimate fˆ (a, b) is connected with the calculation mean of the samples inside the windows Da, b. The filter is a LS
estimator which moves fine for images with standardized intensities, but, edges are distorted. For m = 1, Estimation is the median of the illustration among the windows. In
addition to this, increasing m assigned an increased
authority of outliers on the expected values, basis an improved variation to the preferred filter. The filter stays away from using and transforming outliers in local regions in order to preserve the structures in the image.
This enables fast processing and the global optimum of the nonlinear filter. At last, the non-linear filtering technique is applied to each pixel of the given image and the edge smoothening is done reliably.
3.2 Graph-cut model with Gaussian approximation
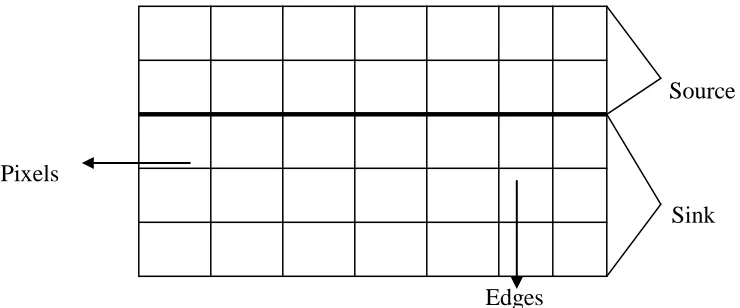
In the graph cuts structure, pixels are termed as nodes in a graph. Associations among neighboring pixels are completed, as well as connections among every pixel and two particular nodes termed as the starting place
(Source, foreground) and destination (background). Represented as an eight-neighbor system, in which s and u are neighbors. These associations are subjective in proportion to the potency of the association among two nodes to
The similar class (either foreground or background). Segmentation is established by cutting the graph into two divisions sorting out the source and sink such that the edge weights beside the cut are smallest. The divided foreground then comprises of the pixels that have integral edges with the source (depicted as solid black lines).
Source
Pixels
Sink
[image:4.612.141.511.398.552.2]Edges
Fig 3.2 Embedding of image into graph
Graph cut strategies have their basis in combinatorial optimization assumption, and are apprehensive with deciding the smallest cut in an undirected graph. A cut is a separation of an associated graph into two disjointed sets. The charge of a cut is the addition of the edge weights beside a cut, and a max-flow min-cut algorithm discovers the cut with the lowest cost. To exercise graph cuts for image segmentation, we must communicate an energy function in terms of edge-weights on a graph. An image is portrayed as a associated graph, where every pixel symbolizes a node, and edges subsist.
Among neighboring nodes. For graph-cut image segmentation, the energy function is needed to
Be expressed using the vertices and edges of the graph G= (V, E),
u s v
s
V
S
U
s
u
U
G
E
,
)
,
(
)
(
)
(
…… (Eqn 4)Where
E (G) - energy function of graph
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459,ISO 9001:2008 Certified Journal, Volume 3, Issue 9, September 2013)
565
(s,u) - Edge weighting that approximates the measure of the boundary weighting of edges in this method assists implement homogeneity of labeling among neighboring spatial points.
It is of reminder that the energy depends ahead the expanse functions for the kernel density position shapes, and not the growing segmentation. If it were to depend on the symbolized distance function of the segmentation, it would not be potential to inscribe the energy in a structure inimitable in a graph cuts structure.
A Gaussian Markov Random Field (GMRF) is a stochastic meadow that pursues a multivariate Gaussian distribution, and is Markovian relating to a graph. The random variants of a GMRF comprise the nodes of a graph
G, with covariance matrix
such that an access in theaccuracy matrix Q = 1
is nonzero if and only if there isan edge concerning the two equivalent random variants. A GMRF has a spare exactness matrix in that its analogous graph is not absolute we presume that we can expect the speed at a location known only the speeds at close by locations. GMRFs have been revealed to estimated subjective covariance formation well in perform, even when the association range is much better than the size of the Markovian neighborhoods. We say that the speed
R
R
V
:
2 of the segmented image using graph-cutmodel and the growing / moving patterns of the object based on speed is represented as
)
(
)
(
)
(
s
X
S
s
V
………… (Eqn 5)Where
X(s) - indicator of the one of the object types
Β - Motion of the object in the segmented image
η – R2 + R is a GMRF
The expected moving patterns of the object in the segmented image using graph-cut model is clearly identified as β which tells about the moving of the object i.e., whether inside or outside of the image boundaries. Finally, the image has been segmented into graph using graph-cut model and the motion of the objects are also been identified using GMRF efficiently.
IV. EXPERIMENTAL EVALUTAION
The proposed edge detection and object tracking using Gaussian approximation with graph-cut model [EDOTGA] is efficiently designed and implemented using Java. The experiments were run on an Intel P-IV machine with 2 GB memory and 3 GHz dual processor CPU. The segmentation results on 100 * 100 pixel windows of a 512 * 512 pixel image. The experiments are conducted with real images to estimate the performance of the proposed EDOTGA. The advantage of using a non-linear filtering technique is to enhance the edge detection process and it smoothen the edge to obtain a clear gut image.
Non linear smoothening filters are efficiently applied on the pixels of motion layers. Then Gaussian approximation is made with graph cut model to evaluate two or more image sequences with higher inter frame motion. After smoothing the edge of the given image, the segmentation is done using graph-cut model. After segmentation, it is necessary to identify the moving object patterns in the segmented image using Gaussian approximation. The performance of the proposed edge detection and object tracking using Gaussian approximation with graph-cut model [EDOTGA] is measured in terms of
1. Edge localization
2. Object tracing speed
3. Computation time for object tracing
Edge localization poses more challenges in image segmentation process, as these instabilities could damage boundaries, pixels, and image clarity.
Object tracing speed notifies the number pf growing/moving objects are to be traced at a given interval of time t.
Computation time for object tracing is the time taken to trace the moving object patterns or motion of the object moves in a particular direction.
V. RESULTS AND DISCUSSION
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459,ISO 9001:2008 Certified Journal, Volume 3, Issue 9, September 2013)
566
The table below describes the performance of the proposed EDOTGA with an existing Vector Filtering
technique for both layered and featured image
[image:6.612.55.285.207.338.2]segmentation.
Table 5.1
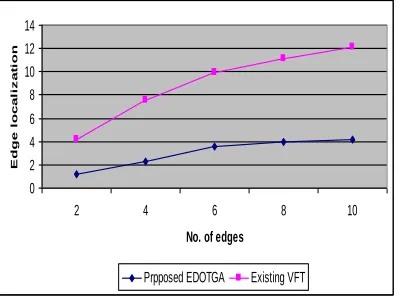
No. of edges vs. edge localization
No. of edges Edge localization
Proposed EDOTGA Existing VFT
2 1.2 3
4 2.3 5.2
6 3.6 6.3
8 4 7.1
10 4.2 7.9
The above table (table 5.1) describes the localization of edges occur when the process of smoothing the edges are done with the given image.
The performance of the proposed edge detection and object tracking using Gaussian approximation with graph-cut model is compared with an existing Vector Filtering
technique for both layered and featured image
segmentation.
0 2 4 6 8 10 12 14
2 4 6 8 10
No. of edges
E
dg
e
l
oc
a
l
i
z
a
t
i
on
[image:6.612.337.552.214.365.2]Prpposed EDOTGA Existing VFT
Fig 5.1 No. of edges vs. edge localization
Fig 5.1 describes the process of localization of edges occur when number of edges in the given image increases. Since the proposed EDOTGA used non-linear filtering technique, the occurrence of edge localization is minimal. The non-linear filtering technique efficiently smoothen the edge and the advantage over non-linear filter is that it is robust and has capability to smoothen at maximum and obtain a clear image. The edge localization is measured based on the number of edges present in the given image.
Compared to an existing Vector Filtering technique for both layered and featured image segmentation which only performs the segmentation process, the proposed EDOTGA possess less edge localization and handles the instabilities in a reliable manner.
Table 5.2
No. of objects vs. tracing speed
No. of
objects
Tracing speed
Proposed
EDOTGA
Existing VFT
2 5 10
4 9 18
6 11 24
8 14 26
10 15 30
The above table (table 5.2) describes the object tracing speed while identifying the motion of object in the given image. The performance of the proposed edge detection and object tracking using Gaussian approximation with graph-cut model is compared with an existing Vector Filtering technique for both layered and featured image segmentation.
0 10 20 30 40 50
2 4 6 8 10
No. of objects
t
r
a
c
i
ng
s
pe
e
d
Prpposed EDOTGA Existing VFT
Fig 5.2 No. of objects vs. tracing speed
[image:6.612.70.269.443.592.2] [image:6.612.337.551.460.618.2]International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459,ISO 9001:2008 Certified Journal, Volume 3, Issue 9, September 2013)
567
The object tracing speed is measured in terms of seconds (secs). Compared to an existing Vector Filtering technique for both layered and featured image segmentation, the proposed edge detection and object tracking using Gaussian approximation with graph-cut Model provides a high object tracing speed and processed well.
Table 5.3
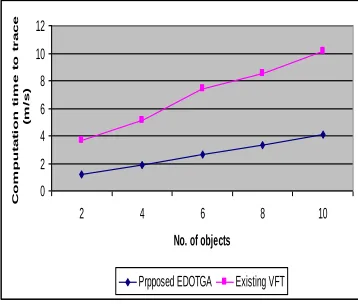
No. of objects vs. computation time
No. of objects Computation time (m/s)
Proposed
EDOTGA
Existing VFT
2 1.2 2.5
4 1.9 3.2
6 2.6 4.8
8 3.3 5.2
10 4.1 6
The above table (table 5.3) describes the computation time taken to identify the motion of object in the given image. The performance of the proposed edge detection and object tracking using Gaussian approximation with graph-cut model is compared with an existing Vector Filtering technique for both layered and featured image segmentation
.
0 2 4 6 8 10 12
2 4 6 8 10
No. of objects
C
om
pu
t
a
t
i
on
t
i
m
e
t
o
t
r
a
c
e
(
m
/
s
)
[image:7.612.78.257.474.626.2]Prpposed EDOTGA Existing VFT
Fig 5.3 No. of objects vs. computation time
Fig 5.3 describes the time taken to trace the object when number of objects motion in the image increases. Since the proposed edge detection and object tracking using Gaussian approximation with graph-cut model used Gaussian approximation method, the time taken to trace the object moving pattern is low.
The computation time to trace the object is measured in terms of milliseconds (m/s). Compared to an existing Vector Filtering technique for both layered and featured image segmentation, the proposed edge detection and object tracking using Gaussian approximation with graph-cut model consumes less computation time and processed well.
At last, it is being noted that the proposed edge detection and object tracking using Gaussian approximation with graph-cut model efficiently performed the smoothening of image by applying non-linear filtering strategy and the object tracing is done in a reliable manner with high tracing speed and less computation time.
VI. CONCLUSION
The edge detection ad object tracking process proposed in this paper efficiently done using Gaussian approximation with graph-cut model. The non-linear filtering strategy is used here for enhancing the edges of the images and obtained the clear image quality. The segmentation of image is efficiently done using graph-cut model. To identify the growing patterns of the object in the given image, here Gaussian approximation is integrated with graph-cut model. Gaussian approximation is made with graph cut model to evaluate two or more image sequences with higher inter frame motion successfully. The experimental results have shown that the proposed edge
detection and object tracking using Gaussian
approximation with graph-cut model achieved better results compared to an existing Vector Filtering technique for both layered and featured image segmentation in terms of object tracing speed, computation time and provide a good image quality.
REFERENCES
[1] Joshua Chang, KC Brennan, Tom Chou et. Al., „Tracking monotonically advancing boundaries in image sequences using graph cuts and recursive kernel shape priors‟, IEEE TRANSACTIONS ON MEDICAL IMAGING, VOL. 31, NO. 5, May 2011
[2] C. Wolgemuth and M. Zajac, “The moving boundary node method: A level set-based, finite volume algorithm with applications to cell motility,” journal of computational physics, vol. 229, no. 19, pp. 7287–7308, 2010.
[3] N. Vaswani, Y. Rathi, et. Al., “Deform pf-mt: particle filter with mode tracker for tracking nonaffine contour deformations,” Image Processing, IEEE Transactions on, vol. 19, no. 4, pp. 841–857, 2010. [4] J. Liu, Monte Carlo strategies in scientific computing. Springer
Verlag, 2008.
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459,ISO 9001:2008 Certified Journal, Volume 3, Issue 9, September 2013)
568
[6] H. Chang, Q. Yang, and B. Parvin, “A bayesian approach for image segmentation with shape priors,” in Computer Vision and Pattern Recognition, 2008. CVPR 2008. IEEE Conference on. IEEE, 2008, pp. 1–8.
[7] P. Das, O. Veksler, V. Zavadsky, and Y. Boykov, “Semiautomatic segmentation with compact shape prior,” Image and Vision Computing, vol. 27, no. 1-2, pp. 206–219, 2009.
[8] O. Veksler, “Star shape prior for graph-cut image segmentation,” Computer Vision–ECCV 2008, pp. 454–467, 2008.
[9] L. Hartman and O. H¨ossjer, “Fast kriging of large data sets with Gaussian Markov random fields,” Computational Statistics & Data Analysis, vol. 52, no. 5, pp. 2331–2349, 2008.
[10] S. Sahu, S. Yip, and D. Holland, “A fast Bayesian method for updating and forecasting hourly ozone levels,” Environmental and Ecological Statistics, pp. 1–23, 2009.
[11] D. Cremers, S. Osher, and S. Soatto, “Kernel density estimation and intrinsic alignment for shape priors in level set segmentation,” International journal of Computer Vision, vol. 69, no. 3, pp. 335– 351, 2006.