2017 2nd International Conference on Computer, Network Security and Communication Engineering (CNSCE 2017) ISBN: 978-1-60595-439-4
Intra-Collision Avoidance with Transmission Power Control in Wireless
Ad-Hoc Networks
Naoya NUMATA and Hiroaki HIGAKI
*Department of Robotics and Mechatronics Tokyo Denki University 5 Senju-Asahimachi, Adachi-ku, Tokyo, Japan
*Corresponding author
Keywords: Wireless multihop transmissions, Collision/contention avoidance, SIR model, Routing.
Abstract. In wireless multihop networks, collisions among wireless transmission signals from the intermediate wireless nodes cause reduction of the end-to-end data message throughput. Hence, avoidance and/or reduction of collisions between 2-hop neighbor intermediate nodes due to the hidden terminal problem is required. For the disk model wireless transmissions, RH2SWL is one of efficient the solutions. However, in a wide-area wireless multihop network where a wireless multihop trans- mission route tends to be longer, the route detection ratio tends to be lower since it becomes difficult for each intermediate wireless node to detect its next-hop node. In order to solve this problem, this paper proposes a novel routing method for a wide- area wireless multihop networks based on the SIR model. The proposed routing method configures a wireless multihop transmission route where each intermediate wireless node receives wireless signal from its previous-hop intermediate wireless node without collisions with that from its next-hop wireless node. The proposed routing method improves the route detection ratio
.
Introduction
Wireless multihop networks such as mobile ad-hoc networks, sensor networks and mesh networks consist of multiple wireless nodes whose battery capacity is usually limited. For achieving higher connectivity among wireless nodes with less collisions among wireless signals, wireless multihop transmissions of data messages have been introduced. Data messages are transmitted along a wireless multihop transmission route which is a sequence of wireless nodes.
In wireless LAN protocols such as IEEE802.11 [8] and Bluetooth [9], collisions among neighbor wireless nodes are avoided by the property of CSMA/CA. In addition, collisions between 2-hop neighbor nodes called the hidden terminal problem are avoided by the RTS/CTS control. However, data message transmissions from a wireless node have to be temporarily suspended while at least one of its 2-hop neighbor nodes transmits data messages. Such contentions reduce end-to-end throughput of data messages since opportunities to forward data messages in the intermediate nodes are reduced. Under an assumption that each node controls transmission power of wireless signals to the minimum to include its next-hop node in its wireless signal transmission range, RH2SWL (Routing Protocol for Multihop Transmissions along a Sequence of Hop-by-Hop Shortening Wireless Links) has been proposed [3].
Related Works
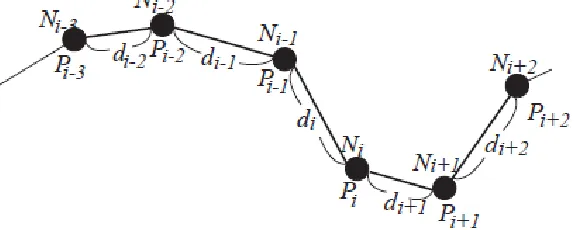
[3] proposes RH2SWL which avoids collisions between Ni−1 and Ni+1 without any temporary suspension of data message transmissions. As shown in Figure 1, a wireless multihop transmission route is configured as a sequence of hop-by-hop shortening wireless links. That is, |Ni−1Ni| > |NiNi+1| is satisfied for any i in a wireless multihop transmission route
0
|| ... n
R=
N N
〉〉. Here, Ni transmits data messages to Ni+1 with the minimum transmission power to include Ni+1 in its wireless signal transmission range. Thus, Ni is included in a wireless signal transmission range ofNi−1; however, Ni is not included in a wireless signal transmission range of Ni+1 since |NiNi+1| > |Ni+1Ni+2| and Ni+1 transmits data messages to Ni+2 with the minimum transmission power to include Ni+2 in a wireless signal transmission range of Ni+1. Therefore, there are no collisions at
[image:2.612.170.432.260.462.2]Ni between data messages transmitted by Ni−1 and Ni+1, i.e., Ni−1 and Ni+1 transmits data messages simultaneously without collisions and higher end-to-end throughput of data messages is expected.
Figure 1. Routing by the Original RH2SWL.
Though the improvement of the data message throughput is achieved, the route detection ratio in RH2SWL is lower than the usual wireless multihop transmissions since RH2SWL requires the transmission routes to be a sequence of hop-by-hop shortening links. Hence, it is difficult to detect longer wireless transmission routes since the number of candidates of next-hop intermediate wireless nodes gets smaller as the number of hops increases. In order to solve this problem, this paper proposes an extension of RH2SWL. The proposed method surely provide the inter-route collision-free wireless multihop transmissions and introduction of various transmission power in the intermediate wireless nodes keeps the probability of next-hop detection high.
Proposal
Suppose that a wireless signal is transmitted from a wireless node N with the transmission power P
to one of its neighbor wireless nodes N'. The receipt power at N' of the wireless signal is βP/dα
where d = |NN'|. In order for N' to receive the wireless signal correctly, the receipt power is required to be more than or equal to a certain threshold P¯ , that is, βP /dα ≥ P¯ should be
Ni and its next-hop intermediate wireless node Ni+1 is longer than the distance from Ni+1 to the point where the receipt power of the wireless signal transmitted from Ni+1 equals to P¯ . Thus, |Ni−1Ni| > |NiNi+1| is satisfied for any i, that is, the wireless multihop transmission route is a sequence of hop-by-hop shortening wireless links.
Figure 2. Distance and Receipt Power in RH2SWL.
In SIR model [2] or the Physical Model [7], the condition for correct receipt of a wireless signal in a wireless node Nr from one of its neighbor wireless node Ns is as follows where Pi is the wireless transmission power of the other neighbor wireless nodes Ni, di is the distance between Ni and Nr, i.e., di = |NiNr|, and n
r
P
is the noise wireless signal power at Nr:/ ( n / )
s s r i s
i s
d
d
P
αβ
P
P
α≠
≥ +
∑
(1)For simplicity in this paper, it is assumed that n
r
P
= 0 is satisfied and wireless signal power from an intermediate wireless node is surely reduced at its 2-hop neighbor wireless nodes. That is, wireless signals transmitted from its previous- and next-hop intermediate wireless nodes are required to be considered by each intermediate wire- less node for collision-free receipts of data messages transmitted along the wireless multihop transmission route. For an intermediate wireless node Ni in a wireless multihop transmission route ||N N
0... n〉〉 to receive data messages transmitted from its previous-hop intermediate wireless node Ni−1 without collisions with the wireless signals transmitted from its next-hop intermediate wireless node Ni+1, the following condition is required to be satisfied where di = |Ni−1Ni|:1/ 1/ 1
i
d
i id
iP
− α≥βP
+ α+ (2) In order for Ni+1 to achieve higher probability to detect its next-hop intermediate wireless node Ni+2, it is prefer to get higher Pi+1. Hence,1 ( 1/ )( 1/ )
i
p
id
id
iP
β
α+ = − + .
Same as in RH2SWL, this paper assumes that the intra-route collision-free wireless multihop transmission routes are detected by using the flooding-based ad-hoc routing protocols such as AODV [6] and DSR [1]. Here, a flooding of a route re- quest control message Rreq is initiated by the source wireless node N0 and each wireless node receiving the Rreq control message broadcasted by one of its neighbor wireless nodes conditionally broadcasts the copy of the Rreq control message. Before an intermediate wireless node Ni+1 is searched, a sequence of intermediate wireless nodes
N1, . . . , Ni has been detected. Hence, Ni+1 can calculate Pi+1 since Pj (0 ≤ j < i) and dj (1 ≤ j < i) has already been determined. Thus, each neighbor wireless node Ni+1 of Ni whose receipt power of the wireless signals transmit- ted by Ni with the transmission power Pi is higher than
independent of the relation between the distances |Ni−1Ni| and |NiNi+1|, which is different from the original RH2SWL, though both methods provide intraroute collision-free wireless multihop transmissions of data messages. As shown in Figures 3 and 4, Ni+1 is the next-hop intermediate wireless node of Ni along the intra-route collision-free wireless multihop transmission route where
di > di+1 and di < di+1, respectively.
[image:4.612.147.462.273.367.2]Since the original RH2SWL is based on the disk model, in order to avoid the collisions at an intermediate wireless node due to the hidden terminal problem between its previous- and next-hop intermediate wireless nodes, a wireless multihop transmission route with a sequence of hop-by-hop shortening wireless links is detected. The lower wireless transmission signals, i.e., the smaller wireless transmission ranges cause the difficulty to detect longer wireless transmission routes due to lower probability for detection of the next-hop intermediate wireless nodes. However, since the proposed extended method by avoidance of the collisions at an intermediate wireless node based on the SIR model does not require the sequence of hop-by-hop shortening wireless links, the probability to detect the next-hop intermediate wireless node is expected to keep high even in the longer wireless multihop transmission routes as shown in Figure 5.
Figure 3. Distance and Receipt Power in SIR Model (di > di+1).
Figure 4. Distance and Receipt Power in SIR Model (di < di+1).
Therefore, the conditions of the distance di+1 = |NiNi+1| and the transmission power Pi+1 to be satisfied for intra-route collision-free wireless multihop transmission route based on the SIR model are as follows:
_
1 /
i
d
i PP
αβ
+ ≥ (3)
1 ( 1/ )( 1/ )
i
p
id
id
iP
+β
α+ −
≥ (4) For detection of the next-hop intermediate wireless node Ni+1 of an intermediate wireless node Ni, the longer di is, the higher Pi is allowed to be applied due to the above formula (4). Hence, from the view of the collision avoidance at Ni due to the hidden terminal problem between
[image:4.612.144.476.389.528.2]the formula (4), Pi/di+1α becomes smaller as di+1 becomes longer. Hence, the restriction on
[image:5.612.164.452.156.271.2]Pi+2/di+2α becomes hard to satisfy and Pi+2 is required to be lower. It results in the narrower available area for Ni+3 and the lower probability to detect a longer wireless multihop transmission route. Therefore, for highly available wireless multihop transmissions without intra-route collisions, reasonable tradeoff between Pi+1 and di+1 is required for detection of Ni+1.
Figure 5. Routing based on SIR Model.
Concluding Remarks
This paper proposes an extension of RH2SWL collision-free ad-hoc routing. Different from the original RH2SWL, i.e., instead of the disk collision model, the SIR collision model is introduced. Thus, the transmission power control is not so simple as the hop-by-hop shortening links in the original RH2SWL, both the distance be- tween successive intermediate wireless nodes and the transmission power are +considered to select the next-hop intermediate wireless nodes. As a result, our novel method realizes higher route detection ratio. Therefore, intra-route collision-free wireless multihop transmissions of data messages are possible for longer transmission routes than the original RH2SWL. For much higher route detection ratio, additional extention such as prioritized transmissions of Rreq control messages are required, which is one of the future work of this research.
References
[1] David, B., David, A. and Hu, Y.C., “The Dynamic Source Routing Protocol,” Internet Draft, draft-ietf-manet-dsr-09.txt (2003).
[2] Gupta, P. and Kumar, P.R., “The Capacity of Wireless Networks,” IEEE Trans- actions on Information Theory, Vol. 46, pp. 388–404 (2000).
[3] Numata, Y. and Higaki, H., “Power Controlled Routing in Wireless Ad-hoc Networks for Higher End-to-End Bandwidth,” Proceedings of the International Conference on Wireless Networks, pp. 199–205 (2006).
[4] Numata, Y. and Higaki, H., “Improvement of Routing Ratio in RH2SWL with Re-Broadcasts of Rreq Control Messages,” IEICE Technical Report, Vol. 107, No. 39, pp. 85–90 (2007).
[5] Perkins, C.E., “Ad Hoc Networking,” Addison-Wesley (2000).
[6] Perkins, C.E. and Royer, E.M., “Ad hoc On–Demand Distance Vector Routing,” RFC 3561 (2003).