ABSTRACT
WANG, PU. Pack Optimization Problem: Models and Solution Methods. (Under the direction of Prof. Shu-Cherng Fang.)
Fashion retailers face the problem of optimizing the order, allocation, and
replenish-ment to fulfill the size-specific demand. Merchandise is commonly pre-packed for easy
handling in the supply chain. By packaging multiple quantities of Stock Keeping Units
(SKUs) together, the flow efficiency in the supply chain can be improved. Meanwhile,
extra opening costs are introduced. The decision maker needs to match the pack level
supply to store level demand as well as to minimize the total costs involved.
This dissertation builds the foundation for the pack optimization problem, which
orig-inates from the practical need of the fashion apparel industry. It determines the optimal
pack order quantities to satisfy each store’s forecasted demand at size level. In the
mean-time, it minimizes the handling costs, and penalty costs due to mismatches between the
supply and demand. In the literature, no formal research has been conducted for this
topic. In this dissertation, the pack optimization problem is formulated as an integer
pro-gramming problem. A dynamic propro-gramming model is also developed for a special case
of the problem. Two heuristic methods are proposed for practical use. Computational
experiments indicate that the hierarchical decomposition heuristic method outperforms
c
Copyright 2010 by Pu Wang
Pack Optimization Problem: Models and Solution Methods
by Pu Wang
A dissertation submitted to the Graduate Faculty of North Carolina State University
in partial fulfillment of the requirements for the Degree of
Doctor of Philosophy
Industrial Engineering
Raleigh, North Carolina
2010
APPROVED BY:
Prof. Salah E. Elmaghraby Prof. Russell E. King
Prof. Matt Stallmann Prof. Shu-Cherng Fang
DEDICATION
BIOGRAPHY
Pu Wang was born in a small town in Jiangxi Province, China. She lived there happily
with her parents before she went to college. She graduated from Tsinghua University,
Beijing, China in 2006 with a B.Eng. degree in Industrial Engineering. She was awarded
the first class scholarship during the four years of undergraduate study.
In August, 2006, she joined the Department of Industrial and Systems Engineering
of North Carolina State University, Raleigh, NC. She is fortunate to meet Tao Hong
during the study at NCSU, who later became her husband. She served as a Teaching
Assistant in the first three semesters and got her Master’s degree in December, 2007.
She continued to pursue her doctoral degree. In the meanwhile, she began to work as a
Research Statistician in SAS Institute, Inc. in February, 2008. During her study, she was
inducted to the Honor Society of Phi Kappa Phi and Omega Rho International Honor
Society for Operations Research and Management Science. Her research is focused on
operations research and optimization, while her work at SAS is about demand forecasting
and revenue optimization. She is fortunate to learn and get trained in both fields, which
ACKNOWLEDGEMENTS
Many people offered help during my Ph.D. study. I am thankful for all of them.
I would like to thank my parents for their love and everything they have done for me.
This dissertation would not be realized without the support of my husband, Tao Hong,
who is always supportive and encouraging. Moreover, he provided many inspiring ideas
for my research. I appreciate his dedication in enabling me to get my Ph.D. degree.
It is so lucky to have Dr. Fang as my advisor. There is so much to learn from him.
Firstly, I am thankful for the knowledge I gained from him over the past few years.
Secondly, I am thankful for his guidance, responsiveness and effort he put forth for me
in the development of this research. Last but not the least, I am thankful for the lessons
that I learned from him beyond the study, which shall help me develop a better character.
I appreciate the guidance and constant support from Dr. Elmaghraby for my study. I
am always encouraged by his passion for research. I thank Dr. King and Dr. Stallmann
for their serving as members of my advisory committee as well as for their suggestions.
I also thank Dr. Hsiang for his kind help in my preliminary exam. I would also like to
express my gratitude to Cecilia Chen for her administrative support and personal touch.
I thank all members of the Fangroup. I always found help and support from them.
It is warm and lucky to be in this big family.
Last but not least, I would like to thank my manager Alex Chien for his trusts and
TABLE OF CONTENTS
List of Tables . . . vii
List of Figures . . . viii
Chapter 1 Introduction . . . 1
1.1 Background . . . 3
1.1.1 Pack Definition . . . 3
1.1.2 Packing Process in Supply Chain Management . . . 5
1.2 Problem Statement . . . 9
1.3 Models and Solutions Methods . . . 13
1.4 Outline . . . 14
Chapter 2 Literature Review . . . 15
2.1 Knapsack Problem . . . 16
2.1.1 Multidimensional Knapsack Problem . . . 18
2.1.2 Multiple Knapsack Problem . . . 25
2.2 Models and Solution Methods . . . 29
2.2.1 Dynamic Programming Approach . . . 29
2.2.2 Lagrangian Method . . . 32
2.2.3 Surrogate Method . . . 36
Chapter 3 Problem Formulation . . . 40
3.1 Integer Programming Model . . . 41
3.2 Related Problems . . . 47
3.3 Dynamic Programming Model . . . 51
3.4 Dynamic Programming Based Algorithm . . . 56
Chapter 4 Heuristic Methods . . . 60
4.1 Naive Heuristic Method . . . 61
4.2 Hierarchical Decomposition Heuristic Method . . . 67
4.2.1 Single-Level HD Heuristic Method . . . 67
4.2.2 Multi-Level HD Heuristic . . . 77
4.2.3 Clustering Method . . . 84
4.3 Summary . . . 89
Chapter 5 Computational Experience . . . 91
5.1 Design of Experiement . . . 92
5.1.2 Test Cases . . . 97
5.2 Computational Results . . . 99
5.2.1 Computational Time . . . 99
5.2.2 Solution Quality . . . 112
5.2.3 Further Exploration of the HD Heuristic . . . 123
5.3 Summary and Conclusions . . . 126
Chapter 6 Conclusions and Future Work . . . 127
6.1 Conclusions . . . 128
6.2 Future Work . . . 129
References . . . 131
Appendices . . . 138
Appendix A Box Plot . . . 139
LIST OF TABLES
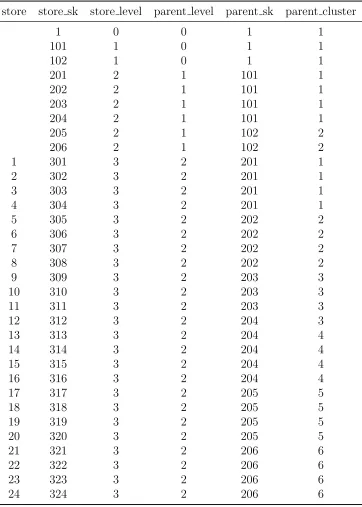
Table 4.1 Hierarchy Table . . . 88
Table 5.1 Set 1: Small-Sized Test Cases . . . 98
Table 5.2 Set 2: Medium-Sized Test Cases . . . 98
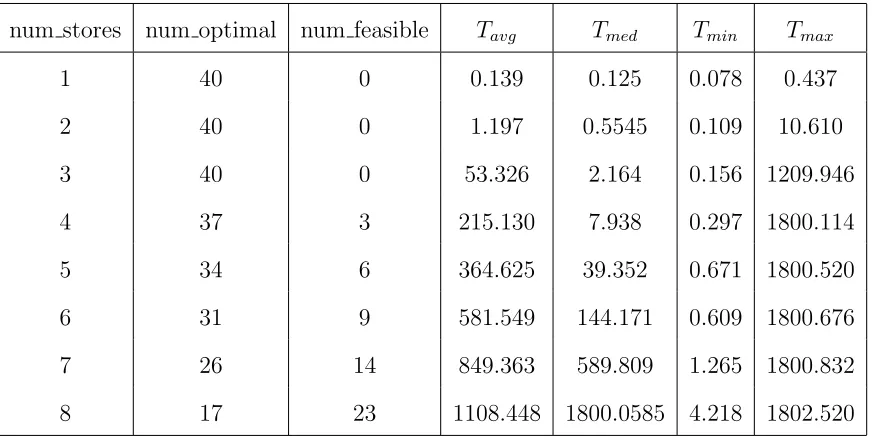
Table 5.3 Solution Status and Computational Time of the Direct Method . . 100
Table 5.4 Computational Time of the Naive Heuristic Method . . . 104
Table 5.5 Solution Status and Computational Time of the HD Heuristic Method107 Table 5.6 Percentage Difference of the Heuristic Methods/Time Limit = 60s 116 Table 5.7 Percentage Difference of the Heuristic Methods/Time Limit = 120s 116 Table 5.8 Percentage Difference of the Heuristic Methods/Time Limit = 180s 117 Table 5.9 Percentage Difference of the Direct Method/Time Limit = 1800s . 117 Table 5.10 Compare the Solution of the HD Heuristic Method with Optimal Solution . . . 122
Table 5.11 Extended Test Cases . . . 123
Table 5.12 Solution Status of the HD Heuristic Method . . . 125
LIST OF FIGURES
Figure 1.1 Pack Definition . . . 4
Figure 1.2 Merchandise Planning Procedure . . . 6
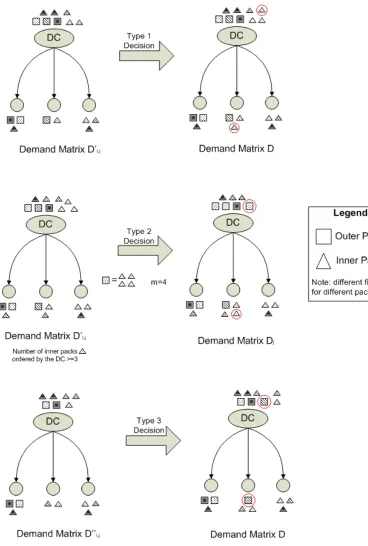
Figure 3.1 Three Types of Decisions . . . 53
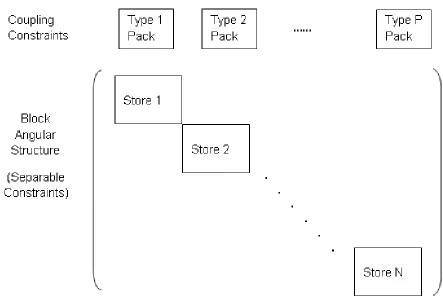
Figure 4.1 Block Angular Structure with Coupling Constraints . . . 61
Figure 4.2 Naive Heuristic Method . . . 63
Figure 4.3 Hierarchical Decomposition Heuristic Method . . . 69
Figure 4.4 Multi-Level Hierarchical Decomposition Heuristic Method . . . 78
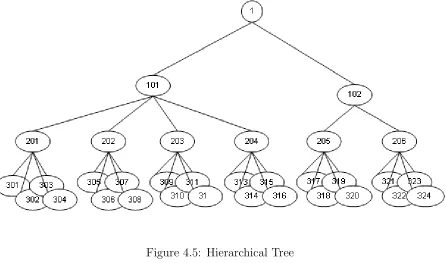
Figure 4.5 Hierarchical Tree . . . 89
Figure 5.1 An Example of the Generated Profiles . . . 94
Figure 5.2 Direct Method: BoxPlots of the Computational Time . . . 101
Figure 5.3 Direct Method: Computational Time vs Number of Stores . . . . 101
Figure 5.4 Direct Method: Histogram of the Computational Time when N = 8.102 Figure 5.5 Naive Heuristic Method: BoxPlots of the Computational Time . . 105
Figure 5.6 Naive Heuristic Method: Computational Time vs Number of Stores 105 Figure 5.7 HD Heuristic Method: BoxPlots of the Computational Time . . . 108
Figure 5.8 HD Heuristic Method: Computational Time vs Number of Stores 109 Figure 5.9 The Computational Time of the Scenarios with 64 and 88 Stores . 110 Figure 5.10 Percentage Difference of the Heuristic Methods/Time Limit = 60s. 113 Figure 5.11 Percentage Difference of the Heuristic Methods/Time Limit = 120s. 114 Figure 5.12 Percentage Difference of the Heuristic Methods/Time Limit = 180s. 114 Figure 5.13 Mean Percentage Difference of the Heuristic Methods/Time Limit = 60s. . . 118
Figure 5.14 Median Percentage Difference of the Heuristic Methods/Time Limit = 60s. . . 118
Figure 5.15 Mean Percentage Difference of the Heuristic Methods/Time Limit = 120s. . . 119
Figure 5.16 Median Percentage Difference of the Heuristic Methods/Time Limit = 120s. . . 119
Figure 5.17 Mean Percentage Difference of the Heuristic Methods/Time Limit = 180s. . . 120
Figure 5.18 Median Percentage Difference of the Heuristic Methods/Time Limit = 180s. . . 120
Figure 5.19 Mean Percentage Difference. . . 121
Figure 5.21 Box Plot of the Pct Diff of the HD Heuristic Method/Time Limit
= 60s. . . 124
Figure 5.22 Mean/Median of the Pct Diff of the HD Heuristic Method/Time Limit = 60s. . . 125
Figure A.1 A Sample of a Box Plot . . . 140
Figure B.1 Hierarchical Trees of the Test Scenarios . . . 142
Chapter 1
Introduction
Merchandise is commonly pre-packed for easy handling in a textile supply chain. The
merchandise at the lowest level of supply chain is named as thestock keeping unit (SKU).
A product line may consist of different SKUs differing in some attributes, such as the color
and size. Pre-packing lumps the merchandise into the packages of SKU combinations.
Such a package is treated as the basic flow unit in the supply chain planning and execution
cycle.
In this dissertation, we examine how the packing process affects the efficiency and
cost of a fashion appareli retail chain, which is named as the pack optimization
prob-lem. Mathematical formulations are provided for the problem. The complexity of the
problem is also studied. Exact and heuristic methods are proposed for solving the pack
optimization problem.
In this chapter, the background of the pack optimization problem is introduced in
Section 1.1. Section 1.2 presents the pack optimization problem and defines the scope as
iThe emerging need of pack optimization originates from the fashion apparel industry, which is
well as major assumptions of our study. Section 1.3 briefly introduces the models and
solution methods to be developed and implemented in our study. Finally, Section 1.4
1.1
Background
Before each selling seasonii begins, retailers often face a series of decision problems
in-cluding ordering, allocation, and replenishment:
Ordering. Orders are placed by the distribution centers (DCs) to vendors.
Allocation. After the DCs receive the orders, they need to allocate the
merchan-dise to individual stores to fulfill the demands.
Replenishment. If the product is in low inventory or sold out in the middle of a
selling season, while more sales are coming, extra orders will be placed to stock up
the inventory.
The basic flow unit is a package. The advantage of this practice is that there are fewer
shipping units in the supply chain, which, as a consequence, increases the flow efficiency.
Section 1.1.1 provides the definition of inner and outer packs that will be deployed in the
pack optimization problem. Section 1.1.2 introduces the role of the packing decisions in
the supply chain workflow.
1.1.1
Pack Definition
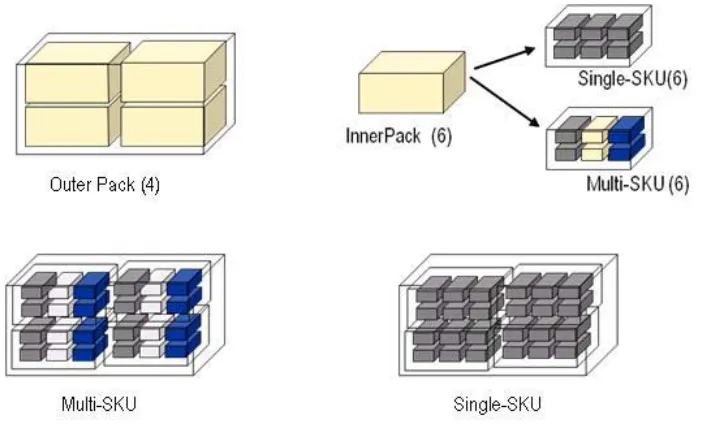
Two types of packs are commonly used: inner packs and outer packs, of which the
definitions are illustrated in Figure 1.1. An inner pack contains a specific number of
units of either identical SKUs (single-SKU inner pack) or different SKUs (multi-SKU
inner pack). In practice, a multi-SKU inner pack contains similar items differentiated
only by size. For example, an inner pack may contain 2 small, 3 medium and 1 large
SKUs. This practice is due to the large varieties of SKUs and small demand for each
SKU. An outer pack contains a specific number of identical inner packs. In Figure 1.1,
each block represents one SKU, the color of the block represents the size. As shown in
the figure, the inner pack containing blocks in the same color is a single-SKU inner pack,
while the one containing blocks in different colors is a multi-SKU inner pack. An outer
pack contain 4 identical inner packs in this case.
Figure 1.1: Pack Definition
Both outer packs and inner packs can be ordered by the DCs. An outer pack may
be sent directly to a store right after it arrives at the DC. It may also be opened at the
DC so that the resulting inner packs can be sent to various stores served by the DC.
Opening an outer pack provides more flexibility to meet the store demand at size-level
at an additional cost.
Sending a package to one store could possibly meet the demand of one item while over
because of the costs due to over-ordering or stockoutiii. Secondly, if a package needs to
be opened at any point (e.g., DC, store), an opening cost applies. Therefore, the retailer
needs to determine a good packing strategy which should balance the flow efficiency
and demand satisfaction. The ultimate goal is to satisfy the store demand requirements
effectively, to enhance flow efficiency throughout the supply chain, and to minimize the
total involving cost. With all the considerations mentioned above, the development of
pack optimization becomes a challenging problem.
1.1.2
Packing Process in Supply Chain Management
A retailer buys goods or products in large quantities from vendors iv, and then sells to
the customers in small quantities. A large retailer may purchase tens of thousands of
products from thousands of vendors, it could be inefficient to ship each product directly
from each vendor to each store. Many large retailers run their own distribution networks,
while the small retailers may outsource this function to a dedicated logistics firm, who
coordinate the distribution of products for a number of retailers. In this dissertation, the
pack optimization problem provides solutions to large retailers mentioned above.
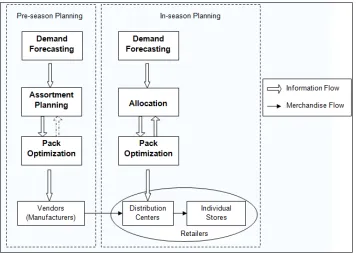
Figure 1.2 shows the decision process and information flow during the merchandise
planning horizon, and the merchandise flow within the supply chain. Most fashion
ap-parels are seasonal goods. This seasonality is not necessary to follow the actual season.
Instead, the seasonality is highly dependent on the product itself. For example, the
ac-tive selling season of a women’s trench coat can be early spring (January to March) or
iiiStockout is the situation where the demand or requirement for an item cannot be fulfilled from the
available inventory. Stockout costs refers to the economic consequences of not being able to meet an interval or external demand from the current inventory. Such costs consist of internal costs (delays, labor time wastage, lost production, etc.) and external costs (loss of profit from lost sales, and loss of future profit). Stockout cost is also called shortages costs.
early Fall (August to October). In the fashion apparel industry, the lead time is usually
long. The retailers need to plan several months ahead for the coming season, which is
called thepre-season planning. The pre-season planning is normally 3 to 6 months earlier
than the active selling season of a product. Thein-season planning plans for the period
which begins when the retailers receive their order (at the DCs), and ends right before
the clearance.
Figure 1.2: Merchandise Planning Procedure
During the pre-season planning, retailers need to determine their orders to the vendor,
so as to fulfill the demand. The pack definitions are normally decided by retailers after
considering vendor constraints, if there is any. This decision on the retailer’s side is driven
predict weekly sales by store for a product (at the style color level). When doing the
assortment planningv, they need to distribute different sizes of a product to the stores.
For example, a men’s Polo shirt in blue color may have sizes of ‘XS’,‘M’, ‘L’ and ‘XL’.
They need to decide exactly how many of each size to deliver to a particular store.
Once the DCs receive the packs from the vendor, the in-season period begins. During
the in-season planning, the packages have to be allocated to individual stores based on the
actual store demand of SKUs. In a scenario where the store demand cannot be fulfilled
in terms of packs, there are two choices. They can either open outer packs and then ship
some loose inner packs, or they can ship outer packs directly to individual stores. Either
way has cost implications. Different methods will affect the number of SKUs received at
individual stores. The packing exercise at this point can be focused on minimizing the
overall cost, including handling cost, opening pack cost and mismatch penalty cost.
In the ideal scenario where the forecasted demand coincides with the actual demand,
the packing decision can be made during the pre-season planning horizon, and the same
decision can be implemented for allocation purpose. However, this is usually not the
case in reality. The actual demand may vary significantly from the forecasted demand,
mainly due to the uncertainty in forecasting and the time difference between ordering and
sales. Ordering to vendors may precede store allocations and sales by several months,
especially for the global business. Events, unaccounted for by the forecasting model,
could occur and affect the accuracy of forecast, such as an economic downturn, a local
festival, etc.. Forecasting accuracy increases as time gets closer to the selling season of
the product. Therefore, at the time of allocating the packs from DC to individual stores,
vAssortment planning breaks the Merchandise Plan down to the components that enable the planner
better forecasts might be available and allocation decisions should be adjusted.
To sum up, in the supply chain, there are two major decisions that are impacted by
the packing process. The first one is the configuration of purchasing orders in terms of the
outer and inner packs, which is based on the demand forecast made several months before
the SKUs reaching the store. The second decision is the allocation of packs to stores to
reduce the opening costs of outer packs and demand mismatches, which is based on the
demand forecast made a couple of days before the SKUs reaching the store. Therefore,
1.2
Problem Statement
In the literature, the white paper written by Inderlal and Divyanshu [44] is the first
one to introduce the pack optimization problem for the fashion retail industry. The
white paper states that “An efficient pre-pack decision-making process involves taking
multiple decisions throughout the supply chain management cycle, starting right from the
demand forecast to initial planned allocation during assortment planning, purchase order
generation, as well as allocation performed at the distribution centers”. In other words, a
successful pack optimization solution requires robust demand forecasting as well as good
assortment planning. Inderlal and Divyanshu suggested a workflow for determining the
optimal pre-pack solution. The flow tells when and how to define a pre-pack. They also
presented mathematical models for the problem but did not give any solution methods.
Inderlal and Divyanshu’s white paper, which is mainly for marketing purpose, is an
article devoted to promoting the pack optimization problem rather than building up the
theoretical foundation. Although some simple mathematical programming models are
presented in the paper, which is also the only paper we can find in the literature, no
solution approach has been proposed. There are some research conducted in a close
related field of assortment planning [52, 45]. However, the research on pack optimization
has never been formally introduced nor mathematically formalized in the academic field.
As shown in Figure 1.2, solving the pack optimization problem requires information
from assortment planning (pre-season) and allocation (in-season). An optimal packing
solution outputs the pack composition, which optimally matches the store-level demand
for the merchandise to the pack-level supply of merchandise. In addition, it also
commu-nicates with other modules in the supply chain, to increase the supply chain efficiency
implementation of pack optimization may lead to great economic benefits.
In the fashion apparel retail industry, the SKU combination in a pack is normally
defined by the vendor. However, sometimes it is up to the retailer, such as Wal-Mart,
to decide the pack definition. In other words, the ones in the leader’s position may
give the pack definition. There are two versions of the pack definition. One is to take
the existing pack definition from retailers directly. The other is to make it as decision
variables of the pack optimization problem. The latter scenario extends the problem
to a “pack recommendation problem”. In our dissertation, we study the problems with
existing pack definitions, and multi-SKUs are allowed in each pack.
The scope of the dissertation is to make optimal packing decisions for retailers. The
goal is to minimize the sum of the costs over the DC and individual stores, including the
handling cost, opening pack cost and mismatch penalty cost. The following assumptions
are made for this study:
1. There is one DC which serves all stores. In reality, DC may serve several stores and
a store may be served by two or more DCs. To simplify the problem, it is assumed
there is only one DC and all stores get supplies from the single DC.
2. The DC cannot hold inventory. In other words, all packs that get into the DC
should be allocated to individual stores.
3. No inner packs can be opened at the DC.
4. The demand for the entire planning season is known. As discussed in Section 1.1.2,
the accuracy of demand forecast changes as time goes by. Probabilistic demand
might be better in presenting the reality. To simplify the scenario, a deterministic
forecast, made at any time, is the same as the actual demand, in other words, it
should not change across the planning horizon.
5. One order is placed per planning season, which means that no backorder and no
replenishment can happen. The assumption could be reasonable for the fashion
industry, where the lead time can be up to 6 months.
6. All the costs involved are linear. In the packing process, a series of costs incur as
the flow goes through the supply chain. Our study is to help the retailers make
the best packing decisions. Therefore, we will focus on the costs at the DCs and
individual stores, which includes the handling cost and opening pack cost. Since the
pack configuration affects the demand fill rate vi and stockout ratevii, a mismatch
penalty cost is also included in the cost function.
Although mismatches are allowed, each store may have a tolerance interval for the
shipment. For each SKU, there exist lower and upper limits for the number of items
received by each store. In particular, it is required that the number of items to be
received by each store be more than its corresponding lower limit and capped by its
corresponding upper limit.
To sum up, the scope of the dissertation is to make optimal packing decisions for
retailers. The goal is to minimize the sum of the costs over the DC and individual stores,
including the handling cost, opening pack cost and mismatch penalty cost. The following
assumptions are made for this study:
1. There is one DC which serves all stores.
viPercentage of customer or consumption orders satisfied from stock at end. It is a measure of an
inventory’s ability to meet demand.
viiPercentage of customer or consumption orders unsatisfied due to stockout. It is a measure of the
2. The DC cannot hold inventory.
3. No inner packs can be opened at the DC.
4. The demand for the entire planning season is known.
5. One order is placed per planning season, which means that no backorder and no
replenishment can happen.
6. All the involving costs are linear.
To provide a complete solution to the pack optimization problem, we need to determine
the number and type of outer and inner packs that should be ordered by the DC. We
also need to decide the number of outer packs to be opened at the DC before allocating
to individual stores. Finally, we need to know the numbers of outer and inner packs to
1.3
Models and Solutions Methods
The pack optimization problem will be formulated as an integer programming problem
(IP) in Chapter 3. It is a straight-forward way of interpreting the problem
mathemat-ically. The resulting IP model can be solved by using some commercial softwares, for
example, SAS/OR, CPLEX, etc., given that the time and computational resources are
sufficient. However, it may not be an efficient way for solving practical problems.
A dynamic programming (DP) model is presented in Chapter 3 to help understand
the complexity of the problem. A DP-based algorithm is also developed. However, the
DP-based algorithm is not an efficient approach for solving large scale pack optimization
problems. Nevertheless, the process of building a DP model and developing a DP-based
approach for the problem may reveal some hidden properties of the problem.
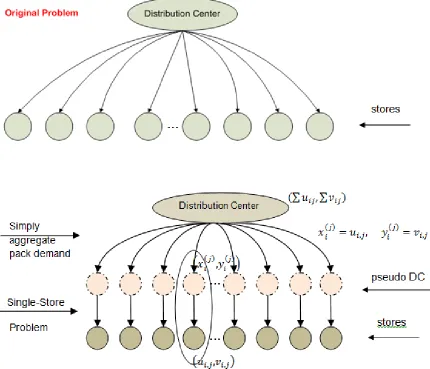
Two heuristic methods: a naive heuristic method and a hierarchical decomposition
(HD) heuristic method, are developed based on some special structures of the problem.
The naive heuristic method treats each individual store separately and breaks the original
problem to multiple “single-store” problems. After solving each of the “single-store”
problem, the solutions are aggregated together to form a solution of the original problem.
It is a quick and dirty approach. In the HD heuristic method, a hierarchy tree is created
and the original problem is decomposed into several small size problems at different
levels of the tree. The computational efforts is eased through the decomposition. These
subproblems are solved from top to down. Computational experiments indicate that this
1.4
Outline
This dissertation is organized as follows: Chapter 1 provides a brief introduction to the
pack optimization problem, including the background, problem statement, related issues,
as well as the proposed models and solution approaches. Chapter 2 is a literature review
on the related knapsack problem and frequently used solution approaches including the
dynamic programming approach and Lagrangian and surrogate methods. In Chapter 3,
an integer programming model of the pack optimization problem is built. The size of the
model is analyzed. A dynamic programming model is also presented, which deals with
a special case of the pack optimization problem with an additional assumption that no
mismatch is allowed. In Chapter 4, two heuristic methods are proposed. Computational
experience and results are reported in Chapter 5. The limitation of the direct method
(solving the IP model directly) is shown to be the most time-consuming. The naive
heuristic method is shown to be most time efficient, while the hierarchical decomposition
heuristic method is efficient in terms of the computational time and effective in terms of
the solution quality. Pros and cons of each method are summarized. Improvements on
the heuristic methods are also recommended. Chapter 6 gives some concluding remarks
Chapter 2
Literature Review
The pack optimization problem is new to academic, there is no paper directly discussing
the pack optimization problem in the literature. However, it is related to some existing
problems, of which the most widely studied one is the knapsack problem because of
its wide applications. This chapter reviews the literature on the related problems and
solution methods.
In Section 2.1, we conduct a review over the multidimensional knapsack problem and
multiple knapsack problem, since both problems are closely related to the pack
opti-mization problem. The pack optiopti-mization problem is formulated as an integer problem
in Chapter 3. Therefore, in Section 2.2, we review some solution approaches for
solv-ing integer programmsolv-ing problems includsolv-ing dynamic programmsolv-ing and Lagrangian and
2.1
Knapsack Problem
Suppose that someone plans to climb a mountain. He can choose among various types
of food to put into his knapsack. The goal is to maximize the nutrition he gets without
exceeding the knapsack capacity (for example, weight). This type of problem is called a
knapsack problem. Number these items from 1 to n. Define the following notations:
pj: the nutrition of item j, for j = 1,· · · , n.
wj: the weight of item j, forj = 1,· · · , n.
b: the knapsack capacity, which is the maximum weight that the knapsack can hold.
xj: the number of item j to be selected, for j = 1,· · · , n.
Then the knapsack problem can be mathematically formulated as follows:
maximize Pn
j=1pjxj (2.1)
subject to Pn
j=1wjxj ≤b, (2.2)
x∈Zn
+. (2.3)
Two types of the knapsack problem are normally considered. One is the 0-1 knapsack
problem withxj = 0 or 1. The other is the bounded knapsack problem where the number
of each item j has an upper bound uj, i.e., 0≤xj ≤uj and xj is an integer.
The special structure of the knapsack problem and its generalizations have attracted
researchers to tackle this problem using various mathematical programming techniques.
Progress has been made over the years and formed a rich literature. Various approaches
Kellerer, Pferschy and Pisinger [49] provided comprehensive surveys on the knapsack
problem.
There are many variants and extensions of the knapsack problem. Lin [55] provided a
bibliographical survey on some well-known extensions of the knapsack problem. The most
frequently studied generalizations include themultidimensional knapsack problem,
multi-ple knapsack problem,multiple choice knapsack problem andquadratic knapsack problem.
For a comprehensive list of the generalizations of the knapsack problem, one can refer
to Chapter 13 of the book of Kellerer, Pferschy and Pisinger [49]. The multidimensional
knapsack problem (d-KPi) is a knapsack problem with multiple resource constraints. The
goal is to determine a subset of the items such that the total profit is maximized and all
resource constraints are satisfied. Themultiple knapsack problem (MKP) is another
vari-ation of the standard knapsack problem. It extends the original knapsack problem from
a single knapsack tom knapsacks with (possibly) different capacities [49]. The objective is to assign each item to at most one of the knapsacks so as to maximize the total profit
without violating any of the constraints. Themultiple choice knapsack problem (MCKP)
arises from the following case: the items are partitioned into several mutually exclusive
sets, and at most one item per set can be selected. As a result, one more constraint
is imposed for each set in addition to the single resource constraint. Another variant
appears if an item has a corresponding profit, and an additional profit is redeemed if the
item is selected with another item. The objective is still to select among the items so
that the total profit is maximized, and the capacity constraint is not violated. This is
the so-called quadratic knapsack problem (QKP).
iThere are several short forms for the multidimensional knapsack problem in the literature, for
As discussed in Section 1.3, both the d-KP and MKP are subproblems of the pack
optimization problem. the solution methods and algorithms for the d-KP and MKP are
reviewed in Section 2.2.1 and Section 2.2.2, respectively.
2.1.1
Multidimensional Knapsack Problem
The multidimensional knapsack problem (d-KP) is a knapsack problem with multiple
resource constraints. It can be mathematically formulated as
maximize Pn
j=1pjxj (2.4)
subject to Pn
j=1wijxj ≤bi, i= 1,· · · , m, (2.5)
x∈Zn
+, (2.6)
where wij is the amount of resource i consumed by item j, and bi is the maximum
capacity of resource i. The d-KP has received attention for its applications, including the capital budgeting problem (Lorie and Savage [56] and Weingartner [84]), cutting
stock problem (Gilmore and Gomory [30]), project selection problem (Petersen [69]),
cargo loading problem (Shih [76]), resource allocation problem (Gavish and Pirkul [25])
and many others. Since the 0-1 knapsack is well known to be NP-hard (Martello and Toth
[64]), it follows that the d-KP is NP-hard. Due to its NP-complexity, most of the work
in the literature are focusing on finding approximation algorithms or heuristic methods
to solve the problem. Exact solution approaches, therefore, receive less attention. And
not to be surprised, most exact methods are reported to be efficient only for small size
problems.
The basic idea in most solution approaches, either exact or approximate, is to transfer
algorithms. The techniques of Lagrangian relaxation and surrogate relaxation therefore
have been widely used. The multiple resource constraints of d-KP can be aggregated
to a single constraint through surrogate relaxation. It can also be decomposed into
several single-constraint knapsack problems by dualizing the resource constraints using
Lagrangian relaxation. The theoretical relation of Lagrangian relaxation, surrogate
re-laxation and composite rere-laxation (i.e., combined Lagrangian and surrogate rere-laxations)
for the 0-1 d-KP have been studied by Gavish and Pirkul [26]. They also provided a
detailed study of the computation of the multipliers concentrating on the d-KP.
Heuristic Solution Approaches
A major part of the research on heuristics for d-KP deals with the utilization of
relax-ations. LP relaxation is the most straightforward relaxation, which simply removes the
integer constraints, or replaces them by linear constraints (e.g., replace binary constraint
for variable xwith 0 ≤x≤1). Lagrangian relaxation and surrogate relaxation also play important roles in providing bounds for approximate solutions.
Senju and Toyoda [75] first proposed a dual gradient method to find approximate
solutions of the 0-1 d-KP. The method starts with all variables being set to one. It
then follows an effective gradient path which searches for a feasible solution by setting
one variable at a time to zero according to increasing reward to weight ratios until the
feasibility is reached. In contrast, the KOCH method presented by Kochenberge, McCarl
and Wyman [50] builds up a solution by assigning a value of one to one variable at a time
until it reaches infeasibility. Magazine and Oguz [59] proposed an LP based heuristic
method called Multi-Knap. Their method combines the idea of Senju-Toyoda’s [75]
heuristic method with Everret’s [20] generalized Lagrange multipliers approach for solving
from the LP relaxation directly without any additional effort. The algorithm is compared
with Senju-Toyoda’s [75] method and KOCH [50]. KOCH starts with a feasible solution
and stops when it reaches infeasibility, while the other two starts with an infeasible
solution and try to reach feasibility. KOCH performs better when the constraints get
tighter, in opposite to the other two. Senju-Toyoda’s method is better when the constraint
is loose, in terms of the quality of the solution. For large size problems, Multi-Knap
almost matches KOCH in performance, and reduces the computational time significantly.
In contrast to the dual gradient method, Toyoda [80] developed a primal gradient
method, which is an enhanced version of KOCH [50]. By incorporating the primal gradient
method of Toyoda [80] and the greedy method for the solution of standard knapsack
problem, Loulou and Michaelides [57] developed a greedy-like heuristic method. The
greedy-like heuristic method expands the feasible solution by including the variable with
the maximum utility instead of the effective gradient as in Toyoda. The
pseudo-utility of a variable represents the profit per unit of resource consumed by this variable.
Computational results show that the greedy-like heuristic method performs better than
the primal dual method in terms of solution quality. However, the CPU time consumed
is slightly higher.
Fr´eville and Plateau [23] proposed aLagrangian and surrogate relaxation based heuris-tic algorithm to solve the d-KP. It was the first algorithm using the idea of perturbing
the solutions to surrogate relaxations and updating the multipliers to obtain good
feasi-ble solutions. Fr´eville and Plateau constructed three sets of surrogate multipliers: from the Lagrangian dual, from the surrogate dual, and from a structural multiplier. Two
linear time heuristics AGNES1 and AGNES2 were proposed to solve the surrogate
con-junction of tests applied to Lagrangian and surrogate relaxations of the original problem.
Computational results have shown encouraging performance of the heuristic algorithm.
Later Fr´eville and Plateau improved the heuristic approach by introducing an efficient subgradient method [24] which effectively controls the step-size. As a result, both the
lower and upper bounds of the d-KP are sharpened. In addition, a new reduction scheme
was also introduced. Fr´eville and Plateau’s improved heuristic method that can serve as an efficient preprocessing procedure for solving large-size d-KP.
Pirkul [70] proposed a surrogate duality approach for the d-KP based on the
opti-mality theory reported by Gavish and Pirkul [26]. Pirkul’s method first solves a series
of LP relaxed standard KP problems. Each has the constraint corresponding to one of
the resource constraint in the d-KP. The solution associated with the minimum objective
value is chosen as the initial set of surrogate multipliers. The set of surrogate
multipli-ers is improved by taking into consideration the most violated resource constraint until
all resource constraints are satisfied. An approximate solution to the d-KP is obtained
by solving the standard knapsack problem, which is resulted from the set of surrogate
constraints based on the ordering of the return to resource consumption ratios.
Com-putational results show that the proposed surrogate dual approach performs better than
Loulou and Michaelides’ [57] both in computational time and solution quality.
Volgenant and Zoon [82] presented a method called K2UB which improved the
heuris-tic method presented by Magazine and Oguz [59]. Instead of computing the values of
multipliers one per iteration (as in [59]), it computes k values simultaneously in one
iteration. It also provides an improved upper bound. Both methods are programmed
in Pascal. In general, the method K2UB obtains better solution than Multi-Knap and
consumes a modest amount of extra computing time.
can be realized with Lagrangian and surrogate relaxations. They showed that the
im-provement of the bound cannot exceed the largest coefficient in the objective function.
Moreover, it cannot exceed one-half of the optimal objective-function value of linear
re-laxation. In particular, it implies that for a problem where all coefficients in the objective
function are 1, the bound derived by the Lagrangian and surrogate relaxation cannot be
better than the one by simply rounding the solution of linear relaxation.
Osorio, Glover and Hammer [68] focused on the generation of logic cuts by using
surrogate analysis and constraint pairing. They allow variables to be fixed at zero based
on the reduced costs associated with the LP relaxation. The rest are then put into two
groups: those tend to zero and those tend to one. Computational results show that
their method uses less number of nodes in the search tree than those leading commercial
softwares including CPLEX. They also reported that when augmented with the proposed
approach, CPLEX performed much better on average.
Bertsimas and Demir [8] presented an approximate dynamic programming (ADP)
approach for the d-KP. They approximated the value function using two methods. The
first method is to use parametric and nonparametric methods. The second method is
to use a base-heuristic. Their new heuristic approach adaptively rounds the solution
of the LP relaxation problem. It is reported to produce high quality solutions fast
and robustly, even faster than CPLEX. The ADP approach using the new heuristic
algorithm outperforms other heuristics such as the genetic algorithms. The ADP based
on parametric and nonparametric is not so competitive.
Instead of using a single technique to develop the heuristic approach, people also
started to exploit the features of different heuristics and try to combine the good features
of different heuristics together. This leads to some hybrid algorithms. The resulting
But through the clever combination of different heuristics, it can obtain very good solution
values for many classes of the problem. The four phase heuristic AGNES by Fr´eville and Plateau [24] is a typical example of the hybrid algorithm.
The heuristic method proposed by Lee and Guignard [53] is also a hybrid method. It
incorporates the modified version of the primal gradient method of Toyoda [80] and the
complement operations of the Balas and Martin algorithm [2]. Computational results
show that their procedure generates better results than Toyoda [80] and Magazine and
Oguz [59], and consumes less time than the latter but not the former. It is also faster
than Balas and Martin algorithm [2], but obtains a little worse solution values. A recent
paper of Thiongane, Nagih and Plateau [78] is a successful application of the hybrid
algorithm.
Due to the complexity of the problem, meta-heuristics have been applied and tested
in the field of the d-KP. Battiti and Tecchiolli [6] marked the importance of the d-KP
as a benchmark problem in their study on reactive tabu search. We will not give a
detail review on this subject since it is not the major view of our study. Here, we only
mention some surveys. Hanafi, Fr´eville and El Abdellaoui [38] provided a good survey on existing contributions in this field. Chu and Beasley [10] not only proposed a new
genetic algorithm for solving the d-KP, but also presented a comprehensive survey of
existing heuristics. For an overview of tabu search approaches, one can refer to Hanafi
and Fr´eville [37].
Exact Solution Approaches
The development of exact algorithms for solving the KP began in the 1960s. The
d-KP is closely related to the general IP problems with the restrictions that all knapsack
the literature, the classical branch-and-bound algorithms for general integer programming
is frequently applied for calculating the optimal solution of the d-KP. Some attempts to
tackle the problem were also made by dynamic programming.
Gilmore and Gomory [32] are among the first to develop an exact approach with a
modified dynamic programming algorithm. The algorithm is based on a major
character-istic of one dimensional cutting stock problem, i.e.,F(x1+x2)≥F(x1) +F(x2). Where
x1 andx2 are the length of each item, and F(x) is the knapsack objective function value
when the length of the item is x. This characteristic is extended into two dimensional problem and used in the dynamic programming forward recursion equation. However,
the characteristic exists only for guillotine cutsii. The inequality is not necessary to hold
for non-guillotine cuts.
Weingartner and Ness [85] proposed a dual approach applied within a dynamic
pro-gramming framework to find an exact solution. In the complement problem, all items
are included at the beginning. During the dynamic programming iterations, it
elimi-nates one variable at a time, from the existing solution, until a feasible solution is found.
Nemhauser and Ullmann [67] extended the work of Weingartner and Ness [85]. For more
literature on improving the dynamic programming algorithm, one can refer to Pisinger
[72] and Balev et al. [4].
Balas [3] presented a branch-and-bound approach for solving general integer
program-ming problems. In his approach, all the variables start at zero and increase to one based
on a systematic pseudo-dual algorithm. The earliest paper containing a
branch-and-bound algorithm especially for the d-KP was given by Thesen [77].
iiA cut is called aguillotine cut if it breaks a connected area into at least two pieces, otherwise it is
Shih [76] designed the first linear programming based branch-and-bound approach
which takes advantage of the special structure of the 0-1 d-KP. It treats the original
problem as m single-constraint binary knapsack problems. Each problem has the same objective function and one of the resource constraints of the original problem.
Compu-tational results show that Shih’s method outperforms Balas’ additive algorithm [3] and
the improved Balas algorithm (Kuester and Mize [51]) in terms of the solution time and
the number of iterations.
2.1.2
Multiple Knapsack Problem
Themultiple knapsack problem (MKP) is another generalization of the standard knapsack
problem. It arises when m knapsacks of possibly different capacities ci (i = 1,· · · , m)
are available. Define the following notations:
pij: the profit of putting item j in knapsack i, for j = 1,· · · , n, i= 1,· · · , m.
wij: the resource consumed by putting item j in knapsack i, for j = 1,· · · , n,
i= 1,· · · , m.
xij: the number of item j selected to put into knapsack i, for j = 1,· · · , n, i =
1,· · ·, m.
The MKP can be mathematically formulated as
maximize Pm
i=1
Pn
j=1pijxij (2.7)
subject to Pn
j=1wijxij ≤ci, i= 1,· · · , m, (2.8)
A classical application of the MKP can be found in the cargo loading problem (Eilon and
Christofides [18]). The same as in the d-KP, the branch-and-bound scheme is frequently
used for solving the MKP. However, dynamic programming algorithms rarely appear in
the literature for this case. The reason is that the MKP does not admit a fully polynomial
time algorithm scheme (FPTAS) unless P = N P [12, 14]. Lagrangian relaxation and surrogate relaxation are among the most popular techniques for providing good lower
and upper bounds in branch-and-bound schemes.
Branch-and-Bound Scheme and Lagrangian/Surrogate Relaxation
Several Branch-and-Bound algorithms for the MKP have been presented. For example,
the algorithms presented by Neebe and Dannenbring [66] and Eilon and Christofides [18]
are designed for problems with many knapsacks and relatively few items. The algorithms
presented by Hung and Fisk [42], Martello and Toth [62, 63] and Pisinger [73] are best
fit for problems with a large number of items and few knapsacks.
Hung and Fisk [42] proposed a branch-and-bound procedure. Various bounding
tech-niques based on Lagrangian and surrogate relaxations have been investigated.
Com-putational results show that the incorporation of surrogate constraints is more efficient
for smaller size problems, while the incorporation of the Lagrangian relaxation is more
efficient for larger size problems.
Martello and Toth [62] presented a different branch-and-bound scheme utilizing the
Lagrangian relaxation technique. Algorithms are developed by using two different
branch-ing strategies and boundbranch-ing procedures, namely MTL and MTLS. The proposed
algo-rithm is compared with Hung and Fisk’s algoalgo-rithm [42]. They refer to HFS for Hung
and Fisk’s algorithm if it is based on surrogate relaxation, HFL if based on Lagrangian
results show that MTL is better than MTLS when m= 2, and worse when m >2. HFS is better than HFLS when m = 2, and worse when m > 2. Later Martello and Toth [63] improved the branch-and-bound scheme and presented a Bound and Bound (called
MTM) framework. The MTM framework has the advantage that it can avoid updating
all variables. The Bound and Bound algorithm based on the MTM framework is
com-pared with Hung and Fisk’s algorithm and MT (MTL and MTLS [62]). Computational
results show that it outperforms the other two.
Pisinger [73] presented a MulKnap algorithm based on the MTM framework. The
framework has been improved in several aspects. First of all, lower bounds are derived
by solving a series of subset-sum problems. The subset-sum problems are also used for
tightening the capacity constraints of each knapsack. Secondly, better upper bounds are
obtained through surrogate relaxation. DP is used to solve each individual subset-sum
problem. The algorithm is the first one designed for solving large size problems with the
number of knapsacks up to n = 100000.
A recent paper in the field is presented by Yamada and Takeoka [86]. Their method
obtains upper bounds using Lagrangian relaxation and lower bounds using a greedy
heuristic approach. A branch-and-bound algorithm is also presented. At each terminal
subproblem, it solves the MKP exactly by invoking the MulKnap code written by Pisinger
[73].
Approximation Algorithms
The building of polynomial time approximation scheme only starts recently. Caprara,
Kellerer and Pferschy [12, 13] presented a polynomial time approximation scheme (PTAS)
for the multiple subset sum problem. It described a 2/3-approximation algorithm. After
Khanna [14] generalized the results and presented a PTAS for the MKP with different
capacities. They also presented a guessing strategy which can provide in polynomial
time almost all the items that are packed by an optimal solution. For the MKP with
assignment restrictions, Dawande et al. [15] showed that simple greedy approaches yield
1/3-approximation algorithms for the objective of maximizing assigned weight. The
dominant property is also exploited to reduce the search space (see Balachandar and
Kannan [1]). Wang and Xing [83] utilized the dominant property and presented a
succes-sive approximation algorithm that packs the knapsacks in nondecreasing order of their
capacities. It analyzes the algorithm for solving the 2 and 3 knapsack problems by a
worst-case analysis and provides error bounds. The error bounds of their approximation
2.2
Models and Solution Methods
In this section, we review the approaches we intend to apply for solving the pack
opti-mization problem. Dynamic programming has been used to find exact solutions of the
knapsack problems. Despite the fact that most of the time it fails to perform efficiently
in solving large size problems, it is still a popular method. The main reason is that the
algorithm identifies the basic components of the original problem, which can help people
understand the details of the problem.
As regard to the heuristic methods, most papers in the literature for solving the d-KP
and MKP, tend to relax the original problem, or decompose the original problem into
subproblems. Each subproblem is a single-constraint knapsack problem. As a result,
La-grangian and surrogate methods have been frequently used. The combination of the two
methods is the so-called composite relaxation (i.e., combination of Lagrangian relaxation
and surrogate relaxation) or composite dual (i.e., combination of Lagrangian dual and
surrogate dual). It is introduced by Greenberg and Pierskalla [35] in 1970. An
intro-duction and brief review of dynamic programming, Lagrangian methods and surrogate
methods is presented in the following three subsections.
2.2.1
Dynamic Programming Approach
Dynamic programming (DP) is both a mathematical optimization model and a computer
programming method. In both contexts, it refers to simplifying a complicated problem
by breaking it down into simpler subproblems in a recursive manner. The technique of
DP is introduced by Bellman [7]. If subproblems can be nested recursively inside larger
problems, so that DP methods are applicable, then there is a relation between the value
relationship is called the Bellman equation.
There are a number of characteristics that are common to all dynamic programming
problems. They are listed as follows:
1. The problem can be divided into stages with a decision required at each stage.
2. Each stage has a number of states associated with it.
3. The decision at one stage transforms one state into a state in the next stage.
4. Given the current state, the optimal decision for each of the remaining states does
not depend on the previous states or decisions.
5. There exists a recursive relationship that identifies the optimal decision for stage
j, given that stage j+ 1 has already been solved.
6. The final stage must be solvable by itself.
The last two properties are tied up in the recursive relationship given above. The major
skill in dynamic programming, and the art involved, is to take a problem and determine
the stages and states so that all of the above characteristics hold.
The knapsack problem has the property of an optimal structure as described above.
Assume that the optimal solution of the knapsack problem has already been computed
for a subset of the items, and part of the knapsack capacity has been used. Then we
add one item to this subset and check whether the optimal solution needs to be changed
for the enlarged subset. This check can be done very easily by using the solutions of
the knapsack problems with a smaller capacity. To preserve this advantage we have to
compute the possible changes of the optimal solutions for all possible capacities. This
procedure of adding an item is iterated until finally all items are considered. Then an
Consider the function
f(n, b) = max
( n X
j=1
pjxj| n
X
j=1
wjxj ≤b, xj ∈ {0,1}, j = 1,· · ·, n
)
, (2.10)
which represents a 0-1 knapsack problem with f(n, b) being the optimal value of the problem. The optimal value can be found using the recursion
f(k, g) = max{f(k−1, g), pk+f(k−1, g−wk)}, (2.11)
fork= 1,· · · , nandwk ≤g ≤b. The recursion is initialized byf(0, g) = 0 for 0 ≤g ≤b.
Gilmore and Gomory developed the first DP model for the KP and two dimensional
KP in in 1966 [32] . Toth presented a DP-based approach for the KP in [79] and reported
numerical experiments with limited success. More recently, Pisinger [71] proposed a DP
algorithm for the KP. It constructs a core problem of minimal size, which can minimize the
sorting and reduction efforts. Hybrid methods, combining DP and implicit enumeration,
were developed for the KP. The first approach was published by Plateau and Elkihel [74].
An approach proposed later by Martello, Pisinger and Toth [61], called combo algorithm,
is able to solve very large instances with 10000 variables in one second. There is basically
no difference in the solution time of solving “easy” and “hard” instances.
Marsten and Morin [60] proposed the first hybrid method for the d-KP, which
com-bines the heuristic algorithms, DP method and branch-and-bound approaches. More
sophisticated methods such as a successive sublimation procedure can be found in [43].
Bertsimas and Demir [8] presented an approximate dynamic programming (ADP)
ap-proach for the d-KP and reported fairly good computational results. Balev et al. [4]
shows that their reduction procedure can improve the CPU time of leading commercial
softwares such as CPLEX. The MKP has been proven to be strongly NP-hard even when
m = 2 (only two knapsacks). Therefore, very few literature can be found to apply DP for solving the MKP.
2.2.2
Lagrangian Method
The introduction of Lagrangian relaxation methods simplifies many hard IP problems.
These hard IP problems can be viewed as an easy problem with some complication caused
by a relatively small set of side constraints. The idea is to dualize the side constraints
using Lagrangian multipliers such that the resulting problem is relatively easy to solve.
The optimal value of the Lagrangian relaxed problem provides an upper bound (for
maximization problem) for the optimal value of the original problem. Consider an integer
programming P in general form
maximize Pn
j=1cjxj (2.12)
subject to P
j=1aijxj ≤bi, i= 1,· · ·, m, (2.13)
x∈Z+n. (2.14)
The Lagrangian relaxed problem L(P, λ) can be written as
maximize Pn
j=1cjxj−
Pm
i=1λi
P
j=1aijxj −bi
(2.15)
x∈Zn
+, (2.16)
where λ = (λ1,· · · , λm) is a vector of nonnegative Lagrangian multipliers. The relaxed
objective function (2.15). Since all feasible solution for P is also feasible for L(P, λ), it naturally leads to the fact that z∗(L(P, λ)) ≥ z∗(P), where z∗ denotes the optimal solution of the problem.
In a branch-and-bound algorithm, we would like to achieve the tightest upper bound
for P. The goal can be achieved by finding a vector of Lagrangian multipliers such that problem L(P, λ) is minimized, namely, the Lagrangian dual problem LD(P) where
z(LD(P)) = min
λ≥0 z(L(P, λ)). (2.17)
Lagrangian decomposition is also a technique of great interests. The idea is to split
the problem into a number of independent problems which can be solved efficiently.
By copying variables and linking them to original variables, as well as a Lagrangian
relaxation, one hopes to be able to decompose the resulting Lagrangian relaxed problem
into several independent subproblems. By introducing copy variables xi
j to the problem
P, where i = 2,· · · , m, for each variable xj and link them to x1j, the following model
applies:
maximize
n
X
j=1
cjxij (2.18)
subject to
n
X
j=1
aijxij ≤bi, i= 1,· · ·, m, (2.19)
x1j =xij, i= 2,· · ·, m, j = 1,· · · , n, (2.20)
Taking Lagrangian relaxation of constraint (2.20), it becomes
maximize
n
X
j=1
cjxij − m X i=2 λi n X j=1
x1j −xij (2.22)
=
n
X
j
cj− m
X
i=2
λi
! x1j +
m X i=2 λi n X j=1
xij (2.23)
subject to X
j=1
aijxij ≤bi, i= 1,· · · , m, (2.24)
x∈Z+mn. (2.25)
The problem can now be decomposed into m independent single-constraint IP problems
maximize zi =Pnj=1cijxij (2.26)
subject to Pn
j=1aijx
i
j ≤bi, (2.27)
x∈Zmn
+ , (2.28)
where c1
j = cj −Pmk=2λk and cij =λi for i = 2,· · · , m. The overall solution is found as
z =Pm
i=1zi.
The Lagrangian relaxation and decomposition techniques have been intensively
stud-ied during the past five decades. It plays a fundamental role in discrete optimization
problems and has been widely used in solving many classical problems. For example, the
generalized Lagrange multipliers approach for solving resource allocation problem in [20],
the well-known column generation techniques applied in cutting stock problem in [30], the
highly successful Lagrangian-based algorithm for the traveling salesman problem (TSP)
in [39, 40], the multiplier adjustment method based-algorithm for solving generalized
improv-ing sequences for solvimprov-ing generalized assignment problem and multiple-choice knapsack
problem in [5], Lagrangian relaxation combined with branch-and-bound for solving
lot-sizing problems in [16]. More applications can be found in the literature. Theoretical
development in the Lagrangian approaches can be found in [29, 9, 36, 87].
A classical reference for the application of the Lagrangian relaxation methods in
solving the IP problems is given by Fisher [21]. It gives a review and a framework of
the approach. Fisher proposed five issues which arise from applications. First of all,
how to find the appropriate values for multipliers? Secondly, is it possible to get a
relaxed problem whose objective value is close to or equal to the optimal value of original
problem? This problem is closely related to the first one. Thirdly, which constraints
to dualize. Fourthly, how to achieve primal feasibility from the Lagrangian relaxations?
Finally, how to integrate the bound obtained from Lagrangian relaxation in a
branch-and-bound method? Each of the issues is discussed below.
Many efforts have been spent on finding the values for the multipliers. For the
non-differentiable case, three approaches are discussed. The first approach is the subgradient
method. The second one is the simplex-based method with column generation. The third
one is the multiplier adjustment method. The subgradient method is the most widely
used one. Held et al. [41] discussed the computational performance and theoretical
con-vergence properties of the subgradient method. The justification for the step size formula
was also given. The simplex-based method with column generation was introduced by
Gilmore and Gomory [30]. It is harder to program, and does not perform well
compu-tationally. Held and Karp [39] tried with the primitive-direction ascent in their work on
TSP. Later Erlenkotter [19] devised a multiplier adjustment method for incapacitated
location problem. Fisher et al. [22] also developed a successful multiplier adjustment
The answer to the third question (i.e., which constraints to dualize) is a little bit
tricky since it is related to the IP formulation. One can have different IP formulations
for the same problem. A “good” formulation (i.e., have the integrality property, see
Geoffrion [29]) can make the problem much easier to solve. With a good formulation,
the selection of relaxations becomes a trade-off between the sharpness of the generated
bounds and the amount of computation required to obtain these bounds.
There are no theoretical answers to the rest three questions. The answers proposed
by Fisher are from the empirical studies of researchers. The second question essentially
concerns about the quality of the solutions obtained by Lagrangian relaxation.
Com-putational experience provides strong evidence that the bounds provided by Lagrangian
relaxation are of high quality in terms of the tightness of bounds. For the fourth problem
(i.e., how to achieve primal feasibility from the Lagrangian relaxations), Fisher reported
that several researchers have successful experience of using Lagrangian solutions obtained
when applying the subgradient method to construct primal feasible solutions. For the last
problem (i.e., how to integrate the bound obtained from Lagrangian relaxation in
branch-and-bound), Fisher stated that Lagrangian relaxation can be used in branch-and-bound
in the same fashion as linear relaxation.
2.2.3
Surrogate Method
A different relaxation technique which attracts less attention is the surrogate relaxation.
Instead of dualizing the constraints, surrogate relaxation simplifies the problem by
re-placing some of the original constraints by a surrogate constraint. A surrogate constraint
is obtained through a nonnegative linear combination of those constraints. Glover [33]
first introduced surrogate constraint into the IP problems in 1965. Geoffrion [27, 28]
the bound obtained by surrogate relaxation. LetS(µ, P) denote the surrogate relaxation of an IP, where µ∈Rm is a vector of multipliers satisfying µ ≥0. Take the problem P
in Section 2.2.2 as an example, the surrogate relaxed problem of P can be written as
maximize Pn
j=1cjxj (2.29)
subject to Pm
i=1µi
Pn
j=1aijxj ≤
Pm
i=1µibi, (2.30)
x∈Zn
+. (2.31)
Similar to the Lagrangian dual, a surrogate dual is to find a vector of multipliers µ =
µ1,· · ·, µm so as to minimize the objective value of problemS(µ, P). It can be presented
as follows
z(SD(P)) = min
µ≥0 z(S(P, µ)). (2.32)
Search methods for computing surrogate multipliers were given by Karwan and Radin
[47], Gavish and Pirkul [26] and Fr´eville and Plateau [24]. Martello and Toth [63] proved that for the MKP the optimal choice of the multipliers is to set them all to the same value.
Karwan and Rardin [46] investigated the relationship between the bounds obtained from
the Lagrangian duals and surrogate duals.
The paper presented by Greenberg and Pierskalla [35] provides the first theoretical
analysis on surrogate duality. Greenberg and Pierskalla provided sufficient conditions
for the absence of surrogate duality gap. Sufficient and necessary conditions were later
developed by Glover [34]. The dual surrogate is proven to be quasi-concave [58], thus
assuring that any local maximum is also a global maximum. It is also shown that the
surrogate approach has a smaller duality gap than the Lagrangian approach.
generalized linear programming and the other one to the subgradient method. Villarreal
and Karwan [81] applied the surrogate relaxation method to develop the upper bounds
(for a maximization problem) in their combined dynamic programming and
branch-and-bound approach for solving the multi-criteria integer programming problem. Karwan
and Rardin [47] provided some empirical evidence on the effectiveness of the surrogate
constraints in solving the integer linear programming problems.
A new surrogate constraint called p-norm surrogate constraint was proposed by Li
[54], which is obtained by taking the p-norm of the surrogate constraint on each side. The
new method based on the p-norm surrogate constraint does not require to search for the
optimal surrogate multiplier vector. Moreover, it is proved to have zero duality gap and
the existence of saddle point is also assured. However, the resulting surrogate relaxation
problem, in general, seems to become more difficult to solve due to the nonlinearity of
the p-norm function.
Nakagawa [65] presented a surrogate constraint method which exactly solves a
multi-constraint separable nonlinear integer program. An approach for closing the surrogate
gap is presented. They also proposed aslicing algorithm (SA). The algorithm can search
exact optimal solutions from the feasible region of the optimal surrogate problem (i.e., a
surrogate relaxation problem with an optimal surrogate multiplier vector) of the original
multi-constrained problem. Computational results show that the proposed method is
quite effective. A previously unsolved 500-variable 5-constraint multidimensional
knap-sack test problem was solved using the SA.
Zhao, Luh and Wang [87] developed a surrogate subgradient method, where a proper
direction can be obtained without optimally solving all subproblems. In fact, only
approx-imate optimization of one subproblem is needed to find a proper surrogate subgradient
the algorithm is proved. Compared with other methods that take efforts to find better
directions, this method can obtain good directions with much less effort. Therefore, it
Chapter 3
Problem Formulation
This chapter formulates the pack optimization problem. Two mathematical programming
models are presented. Section 3.1 formulates the pack optimization problem as an integer
program(IP). The size of the IP model is analyzed. Section 3.2 discussed how the pack
optimization problem relates to several other well-known problems, such as the knapsack
problem, assignment problem, and cutting stock problem. In Section 3.3, a dynamic
programming (DP) model is presented, followed by a DP-based algorithm in Section 3.4.
Since the original pack optimization problem does not exhibit the property of optimal