IJEEE, Volume 5, Issue 5 (October, 2018) e-ISSN: 1694-2310 | p-ISSN: 1694-2426
Microcontroller Based Robotic Arm Movement
Control
Rajdeep Kaur1, Shivani Arora Abrol2
1,2Department of Electrical Engineering, Guru Nanak Dev Engineering College, Ludhiana, Punjab, India
1[email protected], 2[email protected]
Abstract: With the enhancements in technology, the human
being is much indulged in technical era where advent of automation handles the working processes in daily routines. Lots of work related to the daily routine of a person is done using machines either automatically or manually. Robot is a form of machine which is capable of doing tasks within few minutes. Robots are widely used in industrial sector to perform heavy tasks such as shifting, pick and place, packaging of heavy goods etc. Robots based on different theories are available now a days and the size of the robot depends upon the task for which it is specifically meant. Various parts of the robot perform various operations and are known as individual robots themselves. A robotic arm is one such type of robot which performs various operations such as pick and drop, moving the objects etc.
In this postulation, an objective to develop a robotic arm
which is cost effective, capable of 360o angle movement
and free from monitoring, by using specific controls has been proposed. The robotic arm designed in this work is programmed using fuzzy logics based decision making rule set and easy to control as it performs tasks on the basis of color codes. The value corresponding to the gestures is generated and then act as an input to fuzzy logics. The movement of robotic arm is based on color codes. The result section depicts proper overview to the performance of
fuzzy logic based robotic arm.
Keywords: Robots, robotic arm, movements, fuzzy logic
set.
I. INTRODUCTION
Robot is derived from word ‘ROBOTA’, a Czech word that
means “forced labor”. Meaning of ROBOTA explains better why robots are invented. Many heavy and difficult tasks which are otherwise difficult to perform can be easily performed by robots [1]. They are designed to perform operations which are dangerous and otherwise not easy for humans. Robot is an amalgamation of electronics, mechanics and software programs, which is the basis of Mechatronics, which sense the surrounding using detectors, processes the sensor data using software and hence after produce response [2]. The response is in terms of locomotion, for instance turning on a led, rotation of wheels etc. [3].
The branch of technology and engineering that deals with automation style, creation, submission and action is termed robotics, with applications in technology, physics, engineering, defense and even several home devices [4]. Robotics involves the draw-round and configuration of
automated systems. An automated system has the capability of performing assignments and obligations for humans to reorganize life tasks and modernize work frames[5]. The persons who plan automatic systems are applying independence engineers who are predominantly preparing such machines in electrical and mechanical buildings [6]. Robots are hypothetically diverse in that they are prepared with sensors to recognize their environment and actuators to execute exact tasks and can take intelligent decisions [7]. Robots were invented with the idea of serving humans do their everyday jobs, especially 4D’s (dirty, dangerous, difficult, and dull) tasks, more contentedly. The predictable approach in preparation of robots has been to plan their hardware and software in association with the tasks they are supposed to do. Typical robots can do bound tasks precisely, but they are not very adaptable and accommodative, and therefore applications consigned to them heavily dependent to their physical formation on one hand and their controller capabilities on the contradictory hand.
II PROBLEM FORMULATION
Robotics is primarily concerned with generating specific motion of the robot joints, simultaneously allowing sensors to perform certain function, either when arm is moving or not. A robotic arm is a type of mechanical arm, usually programmable, with similar functions to a human arm; the arm may be the sum total of the mechanism or may be part of a more complex robot. The traditional robotic arm was controlled by using sensor embedded on human arm and then these sensors sense the movements which directly control the movement of robotic arm. The disadvantage of such robotic arm was that it was too costly due to the utilization of sensors and this also enhances the complexity of robot. The sensor based movement robotic arm was also not able to work on each and every person since the movements are detected on the basis of pulse rate of human body. The decision making process was also manual. Therefore, there were backlogs detected in traditional robotic arms which proposed the development of a robotic arm by using advance techniques which can make the robot capable to overcome the disadvantages of traditional robotic arm.
III PROPOSED WORK
2
pulse rate varies from person to –person which degrades the performance of arm. Along with this, the decision making system followed was manual which reduces the efficiency and reliability of the system. The robotic arms were also cost effective due to the use of sensors. As a result, the proposed work aims to develop a robotic arm by using soft computing technique i.e. fuzzy logics which make the robot capable to makes decision automatically instead of manually. The values of gestures act as an input to the fuzzy logic system. The movements are detected on the basis of color codes. The color code replaces the sensors for detecting the movement of the robotic arm which makes it capable to be used freely simply by having specific color codes.
IV. METHODOLOGY
The methodology and block diagram of proposed robotic arm is as below: Methodology of robotic arm:
Input 1
Step 1:-Fuzzy object creation
Step 2:-Add X-Y coordinates variables in fuzzy as input Step 3:-Add movement as fuzzy output variable
Step 4:-Rules are defined for Fuzzy input/output
Input 2
Step 1:-Initialize the Webcam
Step 2:-Detect object in captured frame and extract the
coordinate. Fuzzy System
Step 1:-Final designed fuzzy system
Step 2:-Evaluate coordinates as Fuzzy input and decide the movement.
Step 3:-Serially transmit decision command to
connected Robotic Arm: Transmit decision command to
move the Robotic Arm. Signal transmit and receive with the help of RF modem.
Fig.1. Block diagram of proposed work
V Results
This section is designed to represent the results that are obtained after implementing the fuzzy based movement detection in a robotic arm. The proposed work is based on Graphic User Interface which helps user to operate the robotic arm without any difficulties.
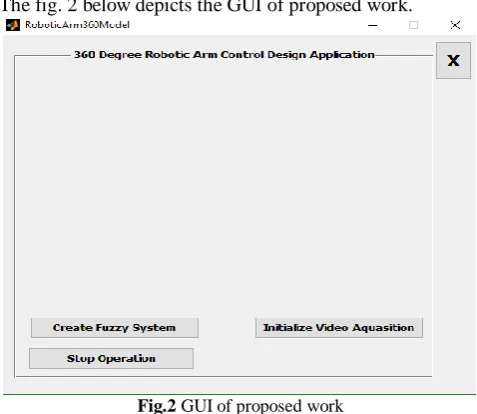
The fig. 2 below depicts the GUI of proposed work.
Fig.2 GUI of proposed work
The GUI consist of three buttons on it, one for creating fuzzy system, second for initializing video acquisition and third to stop the operations.
Fig. 3 Fuzzy initialization
The fig. 3 below depicts the fuzzy interference system of proposed work. In this there are two inputs i.e. X coordinate and Y coordinate which further includes 5 membership functions in it.
These membership functions are depicted in images given by figure 2 and 3. Then MAMDAMI based rules are created to produce the output on the basis of given input to the system.
System ROBOTIC ARM: 2 inputs, 1 outputs, 5 rules X Coordinates (5)
Y Coordinates (5)
Movement (5) ROBOTIC ARM
(mamdani)
5 rules
0 10 20 30 40 50 60 70 80 90 100
0 0.2 0.4 0.6 0.8 1
X Coordinates
D
e
g
re
e
o
f
m
e
m
b
e
rs
h
ip
Very Low Low Medium High Very High Input 2
Input 1
Fuzzy Object creation
Add X-Y co-ordinate variables
in fuzzy as input
Final designed
fuzzy system
Define rules for 2 inputs’ and 1 output Add movement as fuzzy output variable
Initialize the Webcam
Serially transmit decision command to
connected Robotic Arm Detection of hand object
in captured frame
Capturing the video frame
Extract the coordinates of detected object
Fuzzy evaluation
of coordinates detected as
input
Object fuzzy movement
decision
Fig. 4 Membership functions of x coordinate
Figure 4 and 5 shows the membership function corresponding to the first and second input to the fuzzy system. In this the five membership functions are as: very low, low, medium, high, and very low.
Fig. 5 Membership functions of y coordinate
The values for X and Y coordinate have fixed ranges as per the divided quadrants. The table 1 shows the ranges for the used X and Y coordinates.
If both X and Y coordinates have input 1, then the range for this rule is very low that is from 0-20 and this will tends to movement 1 which is left movement of robotic arm.
Table 1 Ranges for X and Y coordinates
When x and y coordinates are sets at 2 then the range is from 21-40 which is low and this will tends to right movement of arm. Similarly, for open and close movement the ranges are from 41-60 and 61-80 respectively.
Figure 6 depicts the membership function corresponding to the output generated by the proposed work. It comprises of five movements of robotic arm as follows:
1. Left
2. Right
3. Open
4. Close
5. Stop
The output or movement of the arm is decided on the basis of the rule set that is defined in table 5.1. If the input of both x and y coordinate is taken as 1 then the range of x and y coordinates lies between 0-20. Hence, the movement of the arm is decided as Left as shown in figure 7.
Fig. 7 Left movement of robotic arm in proposed model
Fig. 8 Surface viewer graph of X,Y coordinates and left movement of robotic arm
Figure 8shows the surface viewer graph of X,Y coordinates and left movement of robotic arm. Here in surface viewer graph, x and y axis represents the input values i.e. X coordinates and Y coordinates ann z axis shows the movement of robotic arm.
Fig. 9 Right movement of robotic arm in proposed model
0 10 20 30 40 50 60 70 80 90 100
0 0.2 0.4 0.6 0.8 1
Y Coordinates
D
e
g
re
e
o
f
m
e
m
b
e
rs
h
ip
Very Low Low Medium High Very High
0 10 20 30 40 50 60 70 80 90 100
0 0.2 0.4 0.6 0.8 1
Movement
D
eg
re
e
of
m
em
be
rs
hi
p
Left Right Open Close Stop
X
coordi-nate
Range
Y coordi
-nate
Range
Move-ment
1 Very Low
[0-20] 1
Very Low
[0-20] 1 (Left)
2 Low
[21-40] 2
Low
[21-40] 2 (Right)
3 Medium
[41-60] 3
Medium
[41-60] 3 (Open)
4 High
[61-80] 4
High
[61-80] 4 (Close)
5 Very High
[81-100] 5
Very High
4
As if the input for x and y coordinates is 2 as given set of rules. The values of X and Y coordinate lies between 21-40 then the robotic arm rotate right sideas shown in figure 9.
Fig. 10 Surface viewer graph of X,Y coordinates and right movement of robotic arm
Figure 10 shows the surface viewer graph of X,Y coordinates and right movement of robotic arm.
Fig. 11 Jaw open movement of robotic arm in proposed model
Now, consider the input 3 for both x and y coordinates, therefore the values for x and coordinated lies in range 41-60 and the detected movement is open jaw as shown in figure 11.
Fig. 12 Surface viewer graph of X,Y coordinates and opening jaw of robotic arm
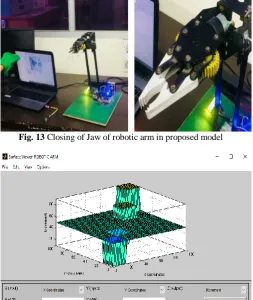
If the input of x and y coordinates is 4 then the values of X and Y coordinate lies between 61-80 range. Hence the detected movement is closing of jaw as shown in figure 12.
Fig. 13 Closing of Jaw of robotic arm in proposed model
Fig. 14 Surface viewer graph of X,Y coordinates and clossing jaw of robotic arm
Figure 14shows the surface viewer graph of X,Y coordinates and clossing jaw of robotic arm.
x-axis:- X coordinates
y-axis:- Y coordinates
z-axis:- Movement of Robotic arm
From the results, it can be concluded that the proposed model is capable of performing efficiently in terms of cost reduction and time.
VI. CONCLUSION
After simulation of the model for the robotic arm shows that the proposed model is cost effective and the easy to use for the application where manual process is difficult to install. The proposed model is soft computing operated model based on MATLAB (control MAMDANI model) which works on the fuzzy based decision capability module and provide better decision model for the movement of the robotic arm in terms of action taking capabilities. The proposed model with the wireless control save the time and the cost as the model is working without using sensors as it was in the traditional approaches which were very costly and complex to install. The proposed model is less complex more efficient in field of cost, decision capability, time. The robotic arm in the proposed model is capable of the rotation for 360 degree angle with pick and drop feature. The whole model operates using the colour gesture based MATLAB interface with fuzzy operated decision capability which providesa novelty and advancement to present technology.
security front. So further modifications are possible in the field of the soft computing and the operation enhancement of the robotic model presents here.
REFERENCES
1. Asma, S., Santhi, J. and Krishna, P. (2015), “Pick and
Place Robotic Grasper using Wireless Communication”, Vol. 3, Issue 11, pp. 11660-11668.
2. ButkarVinayak, B. D., Devikar, S. R., Vikas, J. B. and
Patharwalkar, S. (2014), “Android Based Pick And Place Robot”, International Journal of Informative & Futuristic Research, Volume - 2, Page No: 859-867.
3. Karnik, N., N., Mendel,J., M. and Liang, Q. (1999),
“type-2 fuzzy logic systems” in ieee transactions on fuzzy systems, vol.7, no.6, pp.643-658.
4. Mangukiya, Y., Purohit, B. and George, K. (2017),
“Electromyography (EMG) sensor controlled Assistive Orthotic Robotic Arm for Forearm Movement”, IEEE Conference.
5. Mohammad, J. A., Ali, A. and Hoque, A. (2014),
“Microcontroller Based Robotic Arm”, International Journal of Electrical Engineering and Information & Communication Technology, vol. 4, no. 4, pp. 2410-2416.
6. Rahman, M. A., Khan, H. A., Dr. Ahmed, T. and Sajjad,
M. M. (2013), “Design, Analysis and Implementation of a Robotic Arm-The Animator”, American Journal of Engineering Research (AJER), Vol. 02, No.10, Pp-298-307.
7. Shivani, A. and Saini, S., S. (2007),“ Mechatronics,its