ABSTRACT
YUE, BIN. Novel Finite Element Methods for Wave Propagation Modeling (Under the direction of Dr. Murthy N. Guddati)
The phenomenon of wave propagation is encountered in various engineering problems related to earthquake engineering, nondestructive evaluation and acoustics. Due to the complex material and geometrical features, many of these wave propagation problems are modeled using numerical methods such as the finite element method. Most numerical methods, due to their approximate nature, incur errors in the solution. In the context of wave propagation, these errors can be classified as amplitude and dispersion errors. Of these, dispersion error tends to have more severe effect on the accuracy due to its accumulative nature. Although it is possible to reduce the dispersion error by mesh refinement, such refinement imposes unrealistic computational cost even for medium-sized problems. In light of this, researchers have long sought efficient methods that reduce the dispersion error without any mesh refinement, but such efforts have only been partially successful. This dissertation develops efficient finite element methods for simulation of time-harmonic as well as transient wave propagation.
higher convergence rate while maintaining low computational cost. When applied to elastic waves, the modified integration rules can reduce the dispersion error for either longitudinal or transverse wave, but not both.
Novel Finite Element Methods for Wave Propagation Modeling
by
Bin Yue
A dissertation submitted to the Graduate Faculty of
North Carolina State University
in partial fulfillment of the
requirements for the Degree of
Doctor of Philosophy
Civil Engineering
Raleigh
2004
APPROVED BY:
_________________________
Murthy N. Guddati
(Chair of Advisory Committee)
__________________________ _________________________
Vernon C. Matzen
M. Shamimur Rahman
__________________________ _________________________
ii
BIOGRAPHY
iv
ACKNOWLEDGEMENTS
First and foremost, I want to thank my parents for their unconditional love and support. I am grateful to my doctoral advisor Dr. Murthy Guddati. This dissertation would not exist at all without him. His knowledge, energy, friendship, and inspiration will always serve to me as an example of the perfect supervisor.
Many thanks go to my committee members, Dr. Rahman, Dr. Matzen, Dr. Kumar and Dr. Yuan for helpful discussions and invaluable professional advices.
Table of Contents
List of Tables……….. xii
List of Figures……… xiii
1 Introduction ... 1
1.1 Numerical Modeling of Wave Propagation ... 1
1.2 Preliminaries ... 2
1.2.1 2-D Elastic Waves (Plane Strain) ... 3
1.2.2 Time Harmonic Plane Strain Elastic Wave ... 4
1.2.3 Anti-plane Shear Waves ... 5
1.2.4 Time Harmonic Scalar Wave Equation (Helmholtz Equation) ... 5
1.3 Background and Objectives ... 6
1.3.1 Time Harmonic Analysis ... 6
1.3.2 Transient Analysis ... 8
1.4 Organization... 9
References... 10
2 Local Mesh-dependent Augmented Galerkin Methods for Reducing Dispersion Error for Helmholtz Equation ... 15
2.1 Introduction... 15
2.2 Finite Element Method for Time-Harmonic Wave Propagation Problems ... 18
2.3 Dispersion Error Analysis on Rectangular Meshes ... 21
2.4 Mesh Dependent Augmented Galerkin Methods... 24
2.5 Proposed Local MAG Framework... 27
2.6 Systematic Design of L-MAG methods... 29
2.7 Implementation of L-MAG Finite Element Methods ... 31
2.8 Numerical Examples ... 34
2.8.1 A Plane Wave Problem... 34
2.8.2 Radiation from Point Source... 38
2.8.3 Radiation from an Infinitely Long Circular Cylinder ... 40
2.9 Conclusions... 45
References... 46
3 Modified Integration Rules for Reducing Dispersion Error in Finite Element Methods . 52 3.1 Introduction... 52
3.2 Finite Element Formulation of Time-Harmonic Wave Propagation Problems ... 55
3.3 Generalized Integration Rules for Evaluation of Stiffness and Mass Matrices ... 58
3.4 Dispersion Reducing Integration Rule... 59
3.5 Numerical Examples ... 63
3.6 Concluding Remarks... 70
References... 71
4 Performance of Modified Integration Rules in Simulating Wave Propagation in Heterogeneous and Elastic Media... 74
4.1 Introduction... 74
4.2 Reducing dispersion error for evanescent waves... 76
4.2.1 Preliminaries ... 76
4.2.2 Dispersion Relation... 77
4.2.3 Numerical Experiments ... 78
4.3 Reducing dispersion error for elastic waves ... 80
4.3.1 Finite element formulation of time-harmonic elastic wave ... 80
4.3.2 Dispersion Reducing Integration Rule... 82
4.4 Concluding Remarks... 85
References... 85
5 Extension of Modified Integration Rules to Transient Wave Propagation... 87
5.1 Introduction... 87
5.2 Preliminaries ... 90
5.2.1 Finite element formulation for scalar wave propagation ... 90
5.2.2 The modified integration rules... 92
5.3 Dispersion error analysis... 93
5.4 Dispersion Reducing Techniques for Implicit Methods ... 97
5.4.1 Constant average acceleration method... 98
5.4.2 Linear acceleration method... 98
5.4.3 Fox-Goodwin method ... 99
5.5 Dispersion Reducing Techniques for Explicit Methods ... 100
5.5.1 Modified central difference method... 101
5.5.2 Dispersion reducing integration rule... 102
5.5.3 Stability analysis ... 104
5.5.4 Procedure of the modified central difference method... 105
5.6 Numerical Examples ... 106
5.6.1 Implicit methods ... 106
5.6.2 Explicit methods ... 108
5.7 Concluding Remarks... 113
References... 114
6 Concluding Remarks... 116
6.1 Local Mesh-dependent Augmented Galerkin (L-MAG) Finite Element Method 116 6.2 Modified Integration Rules ... 117
List of Tables
List of Figures
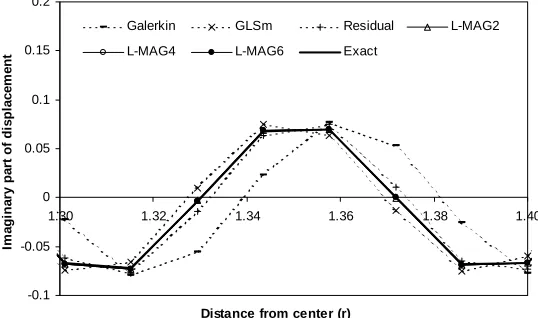
Figure 2-18. Cylindrical radiation problem: displacement in the outermost wavelength of the
computational domain along 0 degree ………... 45
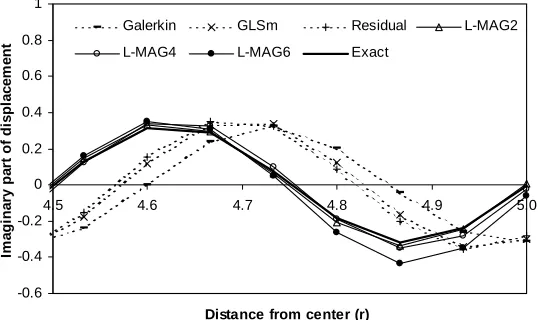
Figure 2-19. Cylindrical radiation problem: displacement in the outermost wavelength of the computational domain along 45 degree ………. 45
Figure 3-1. Nine-node four-element rectangular finite element patch for dispersion analysis (nine-node stencil in case of finite differences) ………. 60
Figure 3-2. Meshes used in numerical examples of plane wave and point source radiation ..65
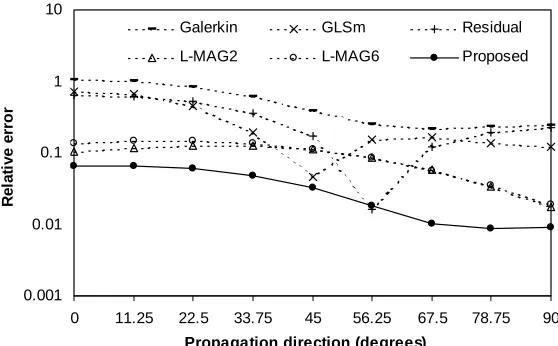
Figure 3-3. Error for varying angles of propagation (with uniform rectangular elements) …65 Figure 3-4. Error for varying domain sizes (with uniform rectangular elements)………….. 66
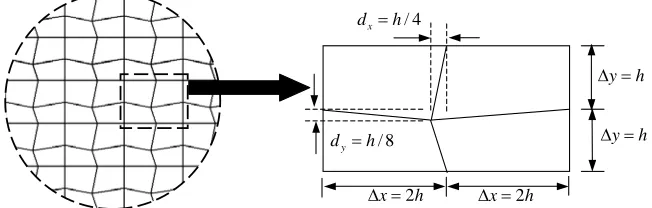
Figure 3-5. Layout of the distorted mesh (h=0.005) ………...66
Figure 3-6. Error for varying angles of propagation (with distorted rectangular elements)…67 Figure 3-7. Error for varying domain sizes (with distorted rectangular elements) ………… 67
Figure 3-8. Radiation from point source (with uniform rectangular elements): Response along the radius………..68
Figure 3-9. Radiation from point source (with distorted rectangular elements): Response along the radius ……….. 68
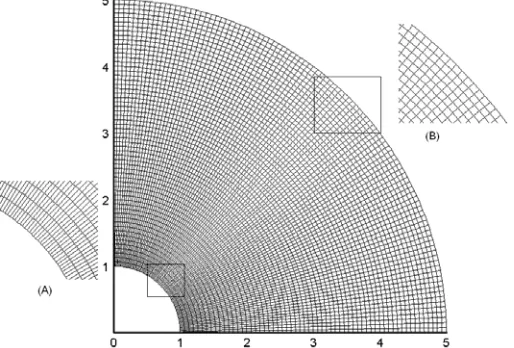
Figure 3-10. Radiation from an infinitely long circular cylinder: Finite element mesh …….70
Figure 3-11. Radiation from an infinitely long circular cylinder: Response along the radius.70 Figure 4-1. Dispersion relations of Galerkin method and Modified integration rules ………77
Figure 4-2. Incident, reflected and transmitted waves ………78
Figure 4-3. Error for varying angles of incident waves ………..79
Figure 4-4. Point load on a layered half-space ……….. 80
Figure 5-1: Four-element nine-node finite element patch ………. 95
Figure 5-4: Displacement contours for the Gaussian explosion example ……… 110
Figure 5-5: Displacement variations for the Gaussian explosion example ……….. 111
Figure 5-6: The unstructured finite element mesh ………... 112
1 Introduction
1.1 Numerical Modeling of Wave Propagation
The phenomenon of wave propagation is encountered in several engineering problems of
immense socio-economic impact. Some of such problems are related to nondestructive
evaluation (NDE), earthquake engineering and medical imaging. In several NDE techniques,
acoustic and electromagnetic wave scattering is used to detect damage, flaws and cracks and thus
predict the serviceability of vital structures [1]. In earthquake engineering, the response of the
structure to the impinging seismic waves depends on the complicated dynamic interaction
between the structure and the soil [2]. Medical imaging is similar to NDE in that the tissue
characteristics are determined by examining the scattering of waves [3]. Similar imaging
techniques are being used to detect landmines for both military and humanitarian purposes [4].
Most of the real life problems described above involve complicated material and geometrical
features. For example, in the context of nondestructive evaluation of composite structures, it is
important to understand propagation, scattering and attenuation of waves in complex
heterogeneous media. Modeling such phenomena is not possible through analytical methods,
and is often performed through numerical simulations. Among all the numerical methods (Finite
Difference Method (FDM), Finite Element Method (FEM), Boundary Element Method (BEM),
Spectral Method [5], Pseudo-spectral Method [6], Wavelet-based Method [7], Mass-Spring
Lattice model [8]), FEM is most appealing for solving wave propagation problems involving
Due to the approximate nature of the numerical methods, these simulations result in
solution errors in the form of artificial distortion, dissipation and reflection of waves. It is
possible to reduce these numerical errors by simply refining the discretization in space and time.
However, such refinement imposes significant increase in computational cost. For example, a
simulation of 40 seconds of an aftershock from the 1994 Northridge quake in Southern
California runs for 6.5 hours on 256 processors of a Cray T3D [9]. A posteriori error estimation
could be used to dynamically change the discretizations in space and/or time [10-12]. Such
adaptive methods are often taxed with huge computational efforts associated with re-meshing.
Improved computational methods producing accurate solutions without requiring fine
meshes could help overcome this limitation. Developing such efficient methods is the focus of
this dissertation.
1.2 Preliminaries
Following is a brief discussion of linear wave propagation in elastic and acoustic media.
Further discussion of wave phenomena can be found in many books (e.g. [13], [14], [15]). Essentially, the governing differential equation of the motion of a mechanical system is obtained
by combining (a) balance of linear momentum, (b) strain-displacement relationships and (c)
constitutive laws.
The balance of linear momentum gives rise to
2 2 t
ρ∂ − ∇ ⋅ = ∂
u
σ f, (1)
The constitutive relationship for isotropic linear elasticity is given by
( )
2trace λ G
= +
σ ε I ε, (2)
where is the identity tensor, I λ and G are the Lame constants of elasticity, and is the infinitesimal strain tensor defined in (3).
ε
The strain is defined as the symmetric part of the gradient of the displacement
[ ]
symm
= ∇
ε u . (3)
Using the above three equations and further simplification, we arrive at the elastic wave
equation
(
)
(
)
(
)
2
2 2G G
t
ρ∂ − ∇ λ+ ∇ ⋅ + ∇× ∇× =
∂
u
u u f. (4)
Alternatively, the constitutive equation is usually expressed as
=
σ Dε, (5)
where is a fourth order tensor made up of Young’s modulus and Poisson’s ratio D E µ. The elastic wave equation is thus expressed as
(
)
2 2 t
ρ∂ − ∇ ⋅ ∇ = ∂
u
D u f . (6)
This dissertation focuses on 2-D waves, while the methods developed here can be easily
extended to 3-D problems.
1.2.1 2-D Elastic Waves (Plane Strain)
Since the tensors are all symmetric for normal materials, they are often expressed in a
simpler way. For example, σ and ε are expressed as vectors and as a second order tensor. In this way, the governing differential equation is written as follows,
2 2 T t ρ∂ − + ∂ u
L σ =f , (7)
=
σ Dε, (8)
=
ε Lu, (9)
where,
0
, , , 0
x x x y y y xy xy x u u y x y σ ε σ ε τ ε ⎡ ∂ ⎤ ⎢ ⎥ ∂ ⎢ ⎥ ⎡ ⎤ ⎡ ⎤ ⎡ ⎤ ⎢ ∂ ⎥ ⎢ ⎥ ⎢ ⎥ =⎢ ⎥ =⎢ ⎥ =⎢ ⎥ =⎢ ⎥ ∂ ⎣ ⎦ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ ⎣ ⎦ ⎢∂ ∂ ⎥ ⎢∂ ∂ ⎥ ⎢ ⎥ ⎣ ⎦
σ ε u L (10)
and is expressed in terms of and D E µ. The problem statement is then,
(
)
22T t ρ∂ − + ∂ u
L DLu =f (11)
with boundary conditions
(
)
( )
( )
hgt on
t on
⋅ = Γ
= Γ
DLu n h
u g (12)
and initial conditions
( )
( )
0 0 at t at t t = = ∂ = = ∂ 0 0u u x u
v x (13)
1.2.2 Time Harmonic Plane Strain Elastic Wave
When the forcing function and boundary conditions are time harmonic, i.e.
i t i t i t
e−ω e−ω e
= = =
then (11) becomes the reduced wave equation,
(
)
2T ρω
−L DLU − U F= , (15)
with boundary conditions
(
)
hg
on on
⋅ = Γ
= Γ
DLU n H
U G (16)
1.2.3 Anti-plane Shear Waves
For anti-plane shear, the displacement is scalar, and the governing equation takes the form
(
)
22T u
D u f
t
ρ∂
− + =
∂
L L , (17)
where
x
y ∂ ⎡ ⎤ ⎢ ⎥∂ ⎢ ⎥ =
∂ ⎢ ⎥ ⎢ ⎥∂ ⎣ ⎦
L (18)
with boundary and initial conditions
(
)
( )
( )
ghD u = h t on
u g t on
⋅ Γ
= Γ
L n
(19)
( )
( )
0 0
0
0
u u at t
u
= v at t
t
= =
∂
= ∂
x
x (20)
1.2.4 Time Harmonic Scalar Wave Equation (Helmholtz Equation)
When the forcing function and boundary conditions are time harmonic, i.e.
-iwt -iwt -iwt
(
)
2 TD U ρω U F
−L L − = (22)
with boundary conditions
(
)
hg
D U H on
U G on
⋅ = Γ
= Γ
L n
(23)
1.3 Background and Objectives
1.3.1 Time Harmonic Analysis
When standard (Galerkin) finite element method is used for simulating time-harmonic wave
propagation, two types of numerical errors occur - error in amplitude and error in wavelength
[17, 18]. In large-scale simulations where the domain size is much larger than the wavelength, the error in the wavelength, known as the dispersion error, tends to accumulate and produce
large phase errors, resulting in completely erroneous results [19]. On the other hand, amplitude
error is relatively benign in that it does not increase with growing domain size. For this reason,
the dispersion error has received increasing attention in the past twenty to thirty years.
It can be quickly realized that dispersion error in one-dimensional time harmonic problems
can be completely eliminated by resorting to analytical solutions [19]. For higher dimensions,
the dispersion error cannot be completely eliminated [20], but can be reduced. Over the past
two decades, several researchers have proposed various methods for reducing the dispersion in
higher dimensions. Following is a brief survey.
The peculiar aspect of dispersion error in higher dimensions is its anisotropy, i.e. the
dispersion error depends on the angle between the wave propagation direction and mesh
orientation. Researchers analyzed this property almost twenty years ago [18], and proposed
for specific cases, but lose their accuracy in more general cases. More recently, Harari and
Hughes [21] have used mathematically precise Galerkin/least squares (GLS) method [22] to reduce dispersion on square meshes. The resulting dispersion error, although reduced, is still
significant. Thompson and Pinsky [23] modified this method to further reduce the dispersion,
but their method still suffers from anisotropy. Babuska and Ihlenburg [24] used the concepts of
Generalized FEM and finite difference stencils to derive a method that reduces the dispersion by
several orders of magnitude, but only for square meshes. Oberai and Pinsky [25] used the
concept of edge residuals to derive the same scheme in the context of finite elements. Their
scheme, when extended to rectangular or unstructured meshes, becomes heuristic in nature and
loses its accuracy properties. Babuska and Melenk [26] used a partition of unity method to
reduce the dispersion, but its practicality is severely limited in that one needs to know the
behavior of the solution a-priori, which is often not the case. Other efforts to reduce the error in
time-harmonic finite element analysis include [27], [28], [29] and [30].
A fundamental limitation of all the above methods is that they are applicable only for
propagating waves in homogeneous media discretized by regular meshes. Many important and
practical problems of wave propagation involve complex geometries and material
heterogeneities, and cannot be discretized using regular meshes. Furthermore, all the above
methods have been developed for acoustics, and the more complicated case of elastic wave
propagation cannot be handled by the above methods. The modified Galerkin/gradient least
square method [31] is applicable to elastic wave propagation, but has anisotropic dispersion
error and cannot handle non-uniform and unstructured meshes.
increases the accuracy of wave propagation modeling. Thus the first objective of this dissertation
is to obtain increased accuracy finite element methods for time-harmonic wave propagation,
requiring minimal increase in the computational cost.
1.3.2 Transient Analysis
Wave propagation in the time domain is generally performed by finite element and finite
difference methods, in conjunction with time stepping algorithms. In addition to the spatial
dispersion error discussed in the previous section, such simulations result in temporal dispersion
(error in time-period) and dissipation (decay of amplitude). These errors are affected by the
choice of the spatial discretization as well as the choice of the time integration algorithm. An
analysis of time stepping algorithms and their influence on temporal dispersion and dissipation
in structural dynamics problems can be found in [16]. Wave propagation is different from
structural dynamics in that the temporal and spatial discretizations need to be closely coupled to
obtain accurate results. An analysis of combinations of spatial and temporal discretizations for
wave propagation can be found in [32].
Temporal dispersion control has been studied as early as 1973 by Krieg and Key [33]. They
realized the opposing effect of lumped and consistent mass matrices and suggested matching the
mass computation with time stepping algorithm. However, their method is robust only for
uniform one-dimensional meshes, and looses its accuracy when applied to non-uniform meshes,
heterogeneous media, or higher dimensions [16]. A simple analysis will indicate that these
shortcomings are closely related to the anisotropy of the spatial dispersion error discussed in the
previous section. Taylor-Galerkin schemes combined with higher order spatial discretization can
cost and often require smooth wave fronts. Space-time discretizations [35] and spectral methods
may reduce these errors, but they too are computationally expensive.
Wang et al. [36] obtained a semi-empirical method based on a 1-D analysis and apply it on
both 1-D and 2-D problems. Krenk introduced a local spatial averaging of the velocity [37].
Stolle [38] and Xie [39] used a direct integration algorithm different from the commonly used Newmark family. In the work by Liu et al. [40], the effect of distortional change of element
shape on wave motion is studied. Despite those efforts, existing algorithms that solve transient
wave propagation problems are not satisfactory; they are either expensive or not very accurate.
The second objective of the research is to develop a numerical method to systematically
reduce spatial and temporal dispersion errors for finite element methods combined with various
time stepping schemes.
1.4 Organization
The dissertation is divided into several chapters, each presenting a significant development.
The chapters constitute individual papers/notes. They are either published, in revision, or to be
submitted in the near future.
Chapter 2 describes the first development of the dissertation, namely the local mesh
dependent Galerkin (L-MAG) method. L-MAG method successfully reduces the dispersion
error for acoustic time-harmonic analysis on square and rectangular meshes and has superior
accuracy and flexibility in comparison with the existing methods.
Chapter 3 contains another, much simpler, dispersion reduction technique. Based on
effective for unstructured meshes. Specifically, the dispersion error is fourth order as opposed to
second order convergence associated with existing methods.
Chapter 4 explores the usage of modified integration rules to evanescent and elastic waves. It
effectively increases the accuracy for the simulation of acoustic wave in heterogeneous media.
When applied to elastic waves, modified integration rules turn out to be not very effective as
they can reduce the dispersion error for either longitudinal or transverse waves, but not both.
Chapter 5 successfully develops algorithms that make the simulation of transient acoustic
waves more efficient, for both implicit and explicit time stepping schemes. The fourth order
convergence rate is again obtained, as opposed to the second order convergence associated with
existing methods.
The final chapter contains some closing remarks on L-MAG method and modified
integration rules, along with some recommendations for future research.
References
1. L. Cartz, Nondestructive Testing (ASM International, Materials Park, OH, 1995).
2. J.P. Wolf, Soil-Structure Interaction Analysis in Time Domain (Prentice Hall, Englewood
Cliffs, NJ, 1988).
3. F.W. Kremkau, Diagnostic Ultrasound: Principles and Instruments (W.B.Saunders,
Philadelphia, PA, 1998).
4. R. Voles, in: Second International Conference on the Detection of Abandoned
Landmines, (1998)
5. D. Komatitsch and J. Tromp, Introduction to the Spectral Element Method for
6. M. Lou and J.A. Rial, Modelling Elastic-Wave Propagation in Inhomogeneous
Anisotropic Media by the Pseudo-Spectral Method, Geophysics Journal International, 120
(1995) 60-72.
7. T.K. Hong and B.L.N. Kennett, A Wavelet-based Method for Simulation of
Two-Dimensional Elastic Wave Propagation, Geophysics Journal International, 150 (2002) 610-638.
8. H. Yim and Y. Sohn, Numerical Simulation and Visualization of Elastic Waves Using
Mass-Spring Lattice Model, IEEE Transactions on Ultrasonics, Ferroelectrics, and Frequency
Control, 47 (2000) 549-558.
9. H. Bao, J. Bielak, O. Ghattas, L.F. Kallivokas, and D.R. O'Hallaron, Large-scale
Simulation of Elastic Wave Propagation in Heterogeneous Media on Parallel Computers,
Computer Methods in Applied Mechanics and Engineering, 152 (1998) 85-102.
10. C.K. Choi and H.J. Chung, An Adaptive Control of Spatial-Temporal Discretization
Error in Finite Element Analysis of Dynamic Problems, Structural Engineering and Mechanics,
3 (1995) 391-410.
11. C.K. Choi and H.J. Chung, Error Estimates and Adaptive Time Stepping for Various
Direct Time Integration Methods, Computers and Structures, 60 (1996) 923-944.
12. C.A. Issa, K. Balasubramaniam, and K. Srirengan, Adaptive hp-Finite Element for
Transient Analysis, Applied Mathematics and Computation, 65 (1994) 315-334.
13. J.B. Whitham, Linear and Nonlinear waves (John Wiley and Sons, New York, 1974).
14. A. Bedford and D.S. Drumheller, Introduction to Elastic Wave Propagation (John Wiley
and Sons Ltd., Chichester, 1994).
15. J.D. Achenbach, Wave Propagation in Elastic Solids (North-Holland Publishing
16. T.J.R. Hughes, The Finite Element Method: Linear Static and Dynamic Finite Element
Analysis (Dover, Mineola, NY, 2000).
17. Z.P. Bazant, Spurious Reflection of Elastic Waves in Nonuniform Finite Element Grids,
Computer Methods in Applied Mechanics and Engineering, 16 (1978) 91-100.
18. R. Mullen and T. Belytschko, Dispersion Analysis of Finite Element Semidiscretizations
of the Two-Dimensional Wave Equation, International Journal for Numerical Methods in
Engineering, 18 (1982) 11-29.
19. F. Ihlenburg, Finite Element Analysis of Acoustic Scattering. Applied Mathematical
Sciences. Vol. 132 (Springer-Verlag, New York, 1998).
20. I.M. Babuska and S.A. Sauter, Is the Pollution Effect of the FEM Avoidable for the
Helmholtz Equation Considering High Wave Numbers?, S.I.A.M Journal on Numerical
Analysis, 34 (1997) 2392-2423.
21. I. Harari and T.J.R. Hughes, Galerkin/Least Squares Finite Element Method for the
Reduced Wave Equation with Non-reflecting Boundary Conditions, Computer Methods in
Applied Mechanics and Engineering, 98 (1992) 411-454.
22. T.J.R. Hughes, Multiscale Phenomena: Green's Functions, the Dirichlet-to-Neumann
Formulation, Subgrid Scale Models, Bubbles, and the Origins of Stabilized Methods, Computer
Methods in Applied Mechanics and Engineering, 127 (1995) 387-401.
23. L.L. Thompson and P.M. Pinsky, A Galerkin Least-Squares Finite Element Method for
the Two-Dimensional Helmholtz Equation, International Journal for Numerical Methods in
24. I.M. Babuska and F. Ihlenburg, A Generalized Finite Element Method for Solving the
Helmholtz Equation in Two-Dimensions with Minimal Pollution, Computer Methods in
Applied Mechanics and Engineering, 128 (1995) 325-359.
25. A.A. Oberai and P.M. Pinsky, A Multiscale Finite Element Method for the Helmholtz
Equation, Computer Methods in Applied Mechanics and Engineering, 154 (1998) 281-297.
26. I.M. Babuska and J.M. Melenk, The Partition of Unity Finite Element Method,
International Journal for Numerical Methods in Engineering, 40 (1997) 727-758.
27. L.P. Franca, C. Farhat, A.P. Macedo, and M. Lesoinne, Residule-free Bubbles for the
Helmholtz Equation, International Journal for Numerical Methods in Engineering, 40 (1997)
4003-4009.
28. H.P. Cherukuri, Dispersion Analysis of Numerical Approximations to Plane Wave
Motions in An Isotropic Elastic Solid, Computational Mechanics, 25 (2000) 317-328.
29. A. Deraemaeker, I.M. Babuska, and P. Bouillard, Dispersion and Pollution of the FEM
Solution for the Helmholtz Equation in One, Two and Three Dimensions, International Journal
for Numerical Methods in Engineering, 46 (1999) 471-499.
30. L. Jiang and R.J. Rogers, Effects of Spatial Discretization on Dispersion and Spurious
Oscillations in Elastic Wave Propagation, International Journal for Numerical Methods in
Engineering, 29 (1990) 1205-1218.
31. I. Harari and S. Haham, Improved Finite Element Methods for Elastic Waves,
Computer Methods in Applied Mechanics and Engineering, 166 (1998) 143-164.
32. K.J. Marfurt, Accuracy of Finite Difference and Finite Element Modeling of the Scalar
33. R.D. Krieg and S.W. Key, Transient Shell Response by Numerical Time Integration,
International Journal for Numerical Methods in Engineering, 7 (1973) 273-286.
34. A. Safjan and J.T. Oden, High-Order Taylor-Galerkin and Adaptive hp-Methods for
Linear Hyperbolic Systems, Journal of Computational Physics, 120 (1995) 206-230.
35. T.J.R. Hughes and G.M. Hulber, Space-time Finite Element Methods for
Elastodynamics: Formulation and Error Estimates, Computer Methods in Applied Mechanics
and Engineering, 66 (1988) 339-363.
36. Y.C. Wang, V. Murti, and S. Valliappan, Assessment of the Accuracy of the Newmark
Method in Transient Analysis of Wave Propagation Problems, Earthquake Engineering and
Structural Dynamics, 21 (1992) 987-1004.
37. S. Krenk, Dispersion-corrected Explicit Integration of the Wave Equation, Computer
Methods in Applied Mechanics and Engineering, 191 (2001) 975-987.
38. D. Stolle, A Direct Integration Algorithm and the Consequence of Numerical Stability,
Journal of Sound and Vibration, 180 (1995) 513-518.
39. Y.M. Xie, An Unusual Stability Property of A Direct Integration Algorithm, Journal of
Sound and Vibration, 192 (1996) 1015-1017.
40. J.B. Liu, S.K. Sharan, and L. Yao, Wave Motion and Its Dispersive Properties in A Finite
2 Local Mesh-dependent
Augmented Galerkin Methods for
Reducing Dispersion Error for Helmholtz Equation
Abstract
Finite element solution of time-harmonic wave propagation results in numerical dispersion that sometimes translates into completely erroneous results, especially for large-scale problems. This paper presents a new framework for developing reduced dispersion finite element methods. Based on the idea of adding element level mesh-dependent parameters to the original Galerkin FEM, hence called the local mesh-dependent augmented Galerkin (L-MAG) method, the proposed method effectively reduces the anisotropic numerical dispersion occurring in multi-dimensional wave propagation simulations. The computational cost of L-MAG FEM is almost identical to Galerkin FEM. With respect to accuracy, while the existing dispersion reducing methods are largely limited to uniform meshes with square elements, the L-MAG FEM, due to its local nature, is able to significantly reduce the numerical dispersion on non-uniform meshes with rectangular elements. This paper contains the formulation of L-MAG FEM, an analysis of associated dispersion errors, and numerical examples that illustrate the method’s effectiveness. [In revision for International Journal for Numerical Methods in Engineering]
2.1 Introduction
Numerical techniques for analyzing wave propagation have been developed by various
researchers over the latter half of the past century. These include finite difference methods,
finite element methods, boundary element methods, spectral methods and other specialized
methods. Of these, finite element methods (FEM), due to their flexibility, appear most appealing
for solving problems involving complex geometry and material heterogeneities. Due to their
approximate nature, FEM and other numerical methods incur errors in the solution. In
wave propagation, two types of numerical errors occur – error in amplitude and error in
wavelength [1, 2]. In large-scale simulations where the domain size is much larger than the
wavelength, the error in the wavelength – known as the dispersion error – tends to accumulate
and produce large phase errors, resulting in completely erroneous results [3]. On the other hand,
amplitude error is relatively benign in that it does not increase with growing domain size. For
this reason, the dispersion error has received increased attention in the past twenty to thirty
years.
The dispersion error could simply be reduced either by using a finer mesh, or by using
higher order finite elements. Both of these options come with large increase in computational
cost, making some of the large-scale simulations prohibitively expensive. Thus, if possible, it is
desirable to reduce the dispersion error without significantly increasing the computational cost.
It can be quickly realized that dispersion error in one-dimensional problems can be completely
eliminated by resorting to analytical solutions [3]. For higher dimensions, the dispersion error
cannot be completely eliminated [4], but can only be reduced. Over the past two decades,
several researchers have proposed various methods for reducing the dispersion in higher
dimensions. Following is a brief survey.
The peculiar aspect of dispersion error in higher dimensions is its anisotropy, i.e., the
dispersion error depends on the angle between the wave propagation direction and mesh
orientation. Mullen and Belytchko [2] have analyzed this property, and proposed some ad-hoc
methods to reduce the dispersion on uniform meshes. These methods work well for specific
cases, but lose their accuracy in more general cases. More recently, Harari and Hughes [5] have
used mathematically precise Galerkin/least squares (GLS) method [6] to reduce dispersion on
and Pinsky [7] modified this method to further reduce the dispersion, but their method still
suffers from anisotropy. Babuska, Ihlenburg et al. [8] used the concepts of Generalized FEM
and finite difference stencils to derive a method that reduces the dispersion by several orders of
magnitude, but only for square meshes. Oberai and Pinsky [9] used the concept of edge
residuals to derive the same scheme in the context of finite elements. Their scheme, when
extended to rectangular or unstructured meshes, becomes heuristic in nature and loses its
accuracy properties. Babuska and Melenk [10] used a partition of unity method to reduce the
dispersion, but its practicality is severely limited in that one needs to know the behavior of the
solution a-priori, which is often not the case. The method of Residual free bubbles, developed
by Franca, Farhat et al. [11], is a robust method that can improve the accuracy by effective
enrichment of shape functions, but such enrichment demands significant increase in
computational cost, especially for non-uniform meshes. Similar comment applies to the sub-grid
modeling approach proposed by Cipolla [12]. Other contributions include Lee and Cangellaris
[13], Scott [14], Harari [15], Ihlenburg [16], Deraemaeker et al. [17] and Rao et al. [18].
A fundamental limitation of all the above methods is that they are applicable only for
propagating waves in homogeneous media discretized by regular meshes. Many important and
practical problems of wave propagation involve complex geometries and material
heterogeneities, and cannot be discretized using regular meshes. Although dispersion reducing
methods for triangular meshes may offer added flexibility [19], the current versions are limited to
uniform structured meshes.
In this paper, a new dispersion reducing finite element method is proposed. Based on a new
local mesh-dependent augmented Galerkin (L-MAG) framework, the proposed method reduces
proposed method is applicable to non-uniform rectangular meshes, and due to its local nature,
shows promise for extension to completely unstructured meshes. This paper focuses on the
development, implementation and testing of the new dispersion reducing methods, with focus
on non-uniform rectangular meshes.
The outline of the paper is as follows: Section 2 contains discussion of the variational
boundary value problem and the (standard) Galerkin finite element discretization of the
problem. In section 3, dispersion error analysis for rectangular meshes is reviewed.
Mesh-dependent augmented Galerkin (MAG) framework is discussed in section 4. This section also
contains the analysis of some existing methods that fit into the MAG framework. In section 5,
the proposed Local MAG (L-MAG) finite element framework is developed and its dispersion
error is analyzed. Subsequent design of dispersion reducing methods based on the L-MAG
framework is presented in Section 6. Section 7 contains the aspects of implementation and
computational cost, whereas section 8 contains several numerical examples illustrating the
effectiveness of L-MAG methods. Concluding remarks are given in section 9.
2.2 Finite Element Method for Time-Harmonic Wave Propagation
Problems
Helmholtz equation, or the reduced wave equation, is used to analyze scalar wave
propagation encountered in linear acoustic and anti-plane shear problems. The corresponding
boundary value problem takes the form: Find u:Ω → , such that
in f u k u− = ∇
− 2 2 Ω
, (1)
with boundary conditions
on g
( )
on hu b u F
∇ ⋅ +n = Γ . (3)
In the above, is the complex-valued field variable (acoustic pressure, or anti-plane
displacement), is the wave number associated with the excitation frequency u
k
(
k =ω c)
, isthe specified field variable on the Dirichlet boundary
g
g
Γ , whereas a Robin type boundary
condition is specified on the remainder of the boundaryΓh. Here, b is an operator ranging
from zero (for pure Neumann boundary condition) to the DtN map in the context of absorbing
boundaries.
Using classical variational calculus, the above (strong) form of the boundary value problem
can be converted to the following (weak) variational form: Find u:Ω → , with u=g on Γg, such that
(
)
2( ) (
)
(
) (
)
g
, , , ( ) , , , , 0 on
h h
v u k v u v b u Γ v f v F Γ v v
∇ ∇ − + = + ∀ = Γ (4)
The notation
( )
i i, is used to define inner product (over the domain Ω) as follows:(
)
*,
f g f g d
Ω
=
∫
Ω, (5)where the *
f is the complex conjugate of f . The notation
( )
, hΓ
i i represents inner product
taken over the boundary Γh.
For numerical solution of the above variational boundary value problem, (Bubnov) Galerkin
Finite Element Method (FEM) can be used, where the Galerkin approximation of the variational
boundary value problem takes the form: Find uh:Ω → , with uh =gh on Γg, such that
(
) (
2) (
) (
) (
)
g
, , , ( ) , , , , 0 on
h h
h h h h h h h h h h
v u k v u v b u v f v F v v
Γ Γ
In the above, and are approximations of u and respectively, and is the
consistent approximation of the Dirichlet data. In the context of conventional finite element
method, and take the form:
h
u vh v gh
h
u vh
, (7) ( ) ( ) and ( ) ( )
h h
u x =N x U v x =N x V
where is the shape function vector, while Uis the discretized field variable (degree of freedom vector) and is its variation. By substituting (7) in (6), we obtain the algebraic
equation ( ) N x
V
Gal =
S U F, (8)
where SGalis the coefficient matrix (associated with standard Galerkin method):
(
)
2(
) (
)
, , , (
h Gal
k ) Γ
= ∇ ∇ − +
S N N N N N B N , (9)
and is the force vector: F
(
,) (
,)
h
f F Γ
= +
F N N . (10)
In (9), note that is the discretized version of the operator in (3). B b
Due to the approximate nature of Galerkin FEM, errors are incurred in the solution.
Considering that the exact solution for the Helmholtz equation is oscillatory, these errors can be
quantified in terms of amplitude error and the dispersion error (error in wavelength). In
contrast with the amplitude error, dispersion error in each wave cycle accumulates to result in
large phase errors. This is a significant concern especially for large-scale wave propagation
problems where the domain size is several orders of magnitude larger than the wavelength.
Thus, it is desirable to reduce the dispersion error to a small value. First step in obtaining such
a dispersion reduction technique is to perform a quantitative analysis of the dispersion error for
element meshes, which is a modified version of the analysis for square meshes by used by
Ihlenburg [3] and others.
2.3 Dispersion Error Analysis on Rectangular Meshes
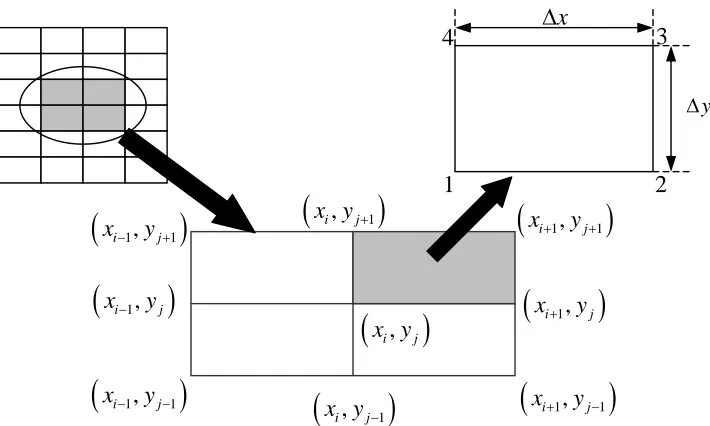
Consider a uniform mesh of rectangular finite elements shown in Figure 2-1. The
coefficient matrix for a four-node rectangular finite element would be:
0 0
0 0
x xy y
x y
element
xy y x
y xy x
S S S S
S S S S
S S S S
S S S S
xy
⎡ ⎤
⎢ ⎥
⎢ ⎥
=⎢ ⎥
⎢ ⎥
⎢ ⎥
⎣ ⎦
S . (11)
The reasons for the above form are as follows: (a) The stiffness matrix is symmetric
since the operator in (9) is self-adjoint. (b) Due to the geometric symmetry of the element, we
can observe the following equalities (the subscripts 0,
(
Sij =Sji)
,
x y and xy have obvious geometrical interpretations): S11=S22 =S33 =S44 =S0, S12 =S34 =Sx, S13 =S24 =Sxy, .
These observations apply not only to the Galerkin FEM but also to any other modification. In
order to obtain the equations associated with the central node
14 = 23 =Sy
S S
( , )x y of the finite element patch in Figure 2-1, we need to assemble all the four elements connected to the node. Such an
assembly will result in the following form of the equation:
(
)
(
)
(
)
0 , , , , ,
, , , ,
4 2 2
0
h h h h h
x y x x x y x x y y x y y x y y
h h h h
xy x x y y x x y y x x y y x x y y
S u S u u S u u
S u u u u
−∆ +∆ −∆ +∆
−∆ −∆ +∆ −∆ +∆ +∆ −∆ +∆
+ + + +
Figure 2-1. Nine-node four-element rectangular finite element patch for dispersion analysis (nine-node stencil in case of finite differences)
x ∆
1 2
3 4
(
xi+1,yj)
(
xi+1,yj−1)
(
xi+1,yj+1)
(
xi−1,yj+1)
(
xi−1,yj−1)
(
xi−1,yj)
(
x yi, j)
(
x yi, j+1)
y
∆
(
x yi, j−1)
This equation can also be obtained by an equivalent finite difference method using a nine-node
stencil shown in the Figure 2-1. Noting that (12) is applicable for all nodes of the discretized
system, it can be shown that the solution for the difference equations takes the form of a plane
wave:
( cos cos h
ik x y h
u =e θ+ θ) (13)
The only difference between the approximate solution and the exact solution
is that the wave numbers and are different. In fact, the dispersion error can be quantified
as the error in the wave wavelengths:
( )
(
ik xcos ysin)
u=e θ+ θ
h
k k
2 2
absolute h
dispersion h
e
k k
π π
λ λ
= − = − . (14)
h h relative dispersion h k k e k λ λ λ − −
= = . (15)
In the above equations, the approximate wave number can be obtained by substituting
the approximate waveform in (13) into the difference equation (12). Such substitution, after
some simplification, results in:
h k
0 x x y y xy x y x y 0 S S C S C S C C u
⎡ + + + ⎤ , =
⎣ ⎦ , (16)
where,
(
)
(
)
cos h cos and cos sin
x y
C = k ∆x θ C = kh∆y θ . (17)
The expression in the brackets in (16) must be zero for the non-trivial solution
(
. Thusthe discrete dispersion relationship relating the exact and approximate wave numbers is given by:
)
, 0 x y u ≠
0 x x y y xy x y 0
S +S C +S C +S C C = . (18)
For Galerkin method, the elements in the coefficient matrix (11) are:
2 2 2
0
2 2 2
2 2 2
2 2 2
, 3 9 2 , 6 1 2 , 6 1 . 6 3 x y xy 8 8 6
x y k x y
S
x y
x y k x y
S
x y
y x k x y
S
x y
x y k x y
S x y ∆ + ∆ ∆ ∆ = − ∆ ∆ ∆ − ∆ ∆ ∆ = − ∆ ∆ ∆ − ∆ ∆ ∆ = − ∆ ∆ ∆ + ∆ ∆ ∆ = − − ∆ ∆ (19)
The resulting dispersion relation for the Galerkin FEM is:
(
)(
2 2)
(
2 2)
(
2 2) (
)
2 2 2Using (20), we can obtain a relation between the exact wave and the approximated wave
number :
k
h k
(
)
(
2 2)
(
2 2)
(
2 2)
12 6 6 2 6 2
1
4 2 2
x y x y
x y x y
C C x y C x y C y x
k
x y C C C C
− ∆ + ∆ + ∆ − ∆ + ∆ − ∆
=
∆ ∆ + + + . (21)
To evaluate the order of difference between and , we take Taylor expansion of in
terms of (note that and are functions of ),
kh khh k
h
k Cx Cy kh
( )
3(
( )
5(
)
4)
2 4 2 4
1
cos sin
24
h h
k=k + ⎣⎡∆x θ + ∆y θ⎦⎤ k +O kh ∆ + ∆x y . (22)
The relative dispersion error is given by:
( )
2(
(
(
)
)
4
2 4 2 4
cos sin 24 h h h h k k k
x y O k x
k θ θ
− = ∆ + ∆ + ∆ + ∆
)
y . (23)
Noting that h, we have k ≈k
(
(
24
2 4 2 4 4
cos sin 24
h
h
k k k
)
)
x y O k x
k θ θ
− = ∆ + ∆ + ∆ + ∆
y . (24)
For square meshes where ∆ = ∆ =x y h, the dispersion error is give by:
( )
2(
( )
4 3 cos 4
96 h h kh k k O kh k θ −
= + +
)
. (25)For lumped mass matrix, the dispersion errors associated with standard Galerkin method
can be obtained using a similar procedure and are given in Table 2-1.
2.4 Mesh Dependent Augmented Galerkin Methods
Many of the methods proposed for dispersion reduction attempt to solve a modification of
(
) (
2) (
)
(
) (
) (
)
, , , ( ) , ,
h h
h h h h h h h h h h
h
v u k v u v b u D v u v f v F,
Γ Γ
∇ ∇ − + + = + , (26)
where, a new term is augmented to the original Galerkin problem. The augmented
term is dependent on the element size; hence we name this class of methods
mesh-dependent augmented Galerkin (MAG) methods. Although the MAG problem is different from
the Galerkin problem, MAG methods, like the Galerkin method, converge to the exact solution
of (4). Such convergence is assured because the MAG term
(
h, hh
D v u
)
)
(
h, hh D v u
(
h, h)
hD v u vanishes in the limit of mesh refinement. The basic idea of the MAG method is to choose the MAG term so as to
improve the accuracy of the solution even for coarse meshes.
Harari and Hughes [5] used this idea in the form of Galerkin least squares (GLS) method for
square meshes, where the MAG term takes the form
(
)
(
)
(
( )
2( )
)
2 4 2
2 1 cos 1
, ,
GLS h h
h
kh
D v u v k v u k u
k k h
⎡ − ⎤
=⎢ − ⎥ ∇ ⋅ ∇ − ∇ ⋅ ∇ −
⎣ ⎦
2
. (27)
GLS method has zero dispersion error for waves propagating along mesh lines, but the method
retains significant dispersion error when the waves do not propagate along the mesh lines. The
dispersion error can be derived using the procedure in sec. 3, and is given by [5]:
( )
2(
( )
1 cos 496
h
h
k k
kh O kh
k
θ
− = − + 4
)
. (28)
A modified GLS (GLSm) method that reduces the maximum dispersion error is proposed
by Thompson and Pinsky [7], where the MAG term is given by:
(
)
(
( )
2( )
)
2 4 2
8 2 2 4 1
, ,
3
x y x y
GLSm h h h
f f f f
D v u v k v u k
k k h
− − −
⎡ ⎤
=⎢ − ⎥ ∇ ⋅ ∇ − ∇ ⋅ ∇ −
⎣ ⎦
2
where fx =cos
(
kh 2+ 2 2 ,)
fy =cos(
kh 2− 2 2)
. The resulting dispersion error is given by:( )
2(
( )
cos 496
h
h
k k
kh O kh
k
θ
−
= + 4
)
. (30)
Although the error is improved in comparison with GLS, the dispersion is still significant when
the propagation direction does not make ±22.5 angle with the mesh lines.
In order to reduce the anisotropy of the dispersion error in square meshes, Babuska et al. [8]
used the nine-node stencil directly to minimize the dispersion error for all propagation angles.
Oberai and Pinsky [9] obtained an equivalent MAG method (residual-based method), where the
augmented term not only contains the least square term, but also some terms associated with
edge residuals:
(
)
(
( ) ( )
2( )
2)
, , Edge Residual Terms
Res h h h
D v u = τ x ∇ ⋅ ∇ −v k v ∇ ⋅ ∇ −u k u + . (31)
The dispersion error for these methods is impressive:
( )
6(
( )
cos 8774144
h
h
k k
kh O kh
k
θ
− = + 8
)
. (32)
However, these methods, as well as the GLS and GLSm methods are derived for uniform square
meshes. They can be extended to uniform rectangular meshes by taking the mesh parameter
( )
has the square root of the element area
(
∆ ⋅ ∆x y)
. However, from numerical examples it can beclearly seen that the above methods, when extended to rectangular meshes, quickly lose their
accuracy. Furthermore, these methods do not provide a systematic way of extension to
unstructured meshes. In the next section, we propose a local (element-by-element) MAG
2.5 Proposed Local MAG Framework
The proposed method is based on the observation that the finite element discretization
results in anisotropic dispersion, which is equivalent to rendering the material anisotropic. In
order to counteract this anisotropy, it may be useful to introduce some artificial anisotropy in the
material so that, after discretization, the behavior is nearly isotropic and the exact propagation
characteristics are restored. To this end, we propose the following MAG term:
(
)
(
intint int
, , , ,
proposed h h h h h
h x y
v u v u
D v u v u
x x y y
α ⎛∂ ∂ ⎞ α ⎛∂ ∂ ⎞
= ⎜ ⎟ + ⎜ ⎟ + ∇∇ ∇
∂ ∂ ∂ ∂
⎝ ⎠ ⎝ ⎠ C ∇
)
, (33)where h x
α and h
y
α are designed to reduce dispersion errors along the mesh directions, and is
a fourth order tensor that is designed to minimize the anisotropic dispersion. The subscript
indicates that the inner products are computed only on the element interiors and the
discontinuities of the derivatives at the element edges are not considered. Furthermore, the
MAG coefficients (
h
C
int
h x
α , h
y
α and ) can be different for different elements, i.e., MAG term
takes the form:
h
C
(
,)
, ,(
,)
h h h h
L MAG h h e e h e h
h x y e
e e e
v u v u
D v u v u
x x y y
α α
− = ⎡ ⎛∂ ∂ ⎞ + ⎛∂ ∂ ⎞ + ∇∇ ⎤
⎢ ⎜ ∂ ∂ ⎟ ⎜ ∂ ∂ ⎟ ⎥
⎢ ⎝ ⎠ ⎝ ⎠ ⎥
⎣ ⎦
∑
C∇∇ , (34)where is the element index and e
( )
i i, erepresents inner product taken over the interior ofelement . It is important to note that the MAG coefficients for a given element are completely
determined using its geometry and material properties, and are independent of the other element
properties. Due to this local nature, the method is named local MAG (L-MAG) method. Such
dispersion error. The remainder of the paper focuses on the development and testing of the
L-MAG method for non-uniform rectangular meshes with bilinear elements.
Noting that, for bilinear rectangular meshes, the only nonzero second derivative is
2 h u x y
∂ ∂ ∂ , the L-MAG term simplifies to:
(
)
2 2, , , ,
h h h h h h
L MAG h h e e e
h x y xy
e e e
v u v u v u
D v u
x x y y x y x y
α α β − = ⎡ ⎛∂ ∂ ⎞ + ⎛∂ ∂ ⎞ + ⎛∂ ∂ ⎤ ⎢ ⎜ ∂ ∂ ⎟ ⎜ ∂ ∂ ⎟ ⎜∂ ∂ ∂ ∂ ⎥ ⎢ ⎝ ⎠ ⎝ ⎠ ⎝ ⎥ ⎣ ⎦
∑
e ⎞ ⎟⎠ . (35)
The L-MAG coefficients ( e x
α , e
y
α and e xy
β ) of an element can be chosen such that the
dispersion error is minimized when the element is used in a uniform mesh. While not losing any
generality, such a treatment greatly simplifies the derivation and the results from section 3 can be
utilized. For uniform rectangular meshes with element size of ∆ × ∆x y, the terms for the coefficient matrix (11) for the L-MAG method is given by (see section 3 for details):
2 2 2
0
2 2 2
2 2 2
2 2 2
,
3 9 3 3
2
,
6 18 3 6
2
,
6 18 6 3
.
6 36 6 6
y xy x y x x x y x x y y x x xy x y
x y k x y
S
y
y
y
x y x y
x y
x y k x y
S
x y
x y x y
x y
y x k x y
S
x y
x y x y
x y
x y k x y
S
x y
x y x y x y
α β α α β α α β α α β α ∆ ∆ ∆ + ∆ ∆ ∆ = − + + + ∆ ∆ ∆ ∆ ∆ ∆ ∆ ∆ ∆ − ∆ ∆ ∆ = − − + − ∆ ∆ ∆ ∆ ∆ ∆ ∆ ∆ ∆ − ∆ ∆ ∆ = − + − − ∆ ∆ ∆ ∆ ∆ ∆ ∆ ∆ ∆ + ∆ ∆ ∆ = − − − − + ∆ ∆ ∆ ∆ ∆ ∆ (36)
Substituting the above in the dispersion relation (18) results in the dispersion relation
specific to L-MAG method:
(
)(
2 2)
(
2 2)
(
2 2) (
)
2 22 2
12 6 6 2 6 2 4 2 2
6 2 2 6 2 2 36 1 0
x y x y x y x y
y x y x y x y x x y xy x y x y
C C x y C x y C y x C C C C x y k
xα C C C C yα C C C C β C C C C
− ∆ + ∆ + ∆ − ∆ + ∆ − ∆ − + + + ∆ ∆
⎡ ⎤ ⎡ ⎤ ⎡
+ ∆ ⎣ + − − ⎦+ ∆ ⎣ + − − ⎦+ ⎣ − − + =
where Cx and Cy are given in (17). In the preliminary version of this method [20],
e x
α is
chosen such that the dispersion error is eliminated ( ) for wave propagating along the
x-axis ( ). Substituting and in (37) results in:
h k k = 0 = θ h
k =k θ =0
(
)
(
)
2 2 2 cos
1
1 cos 6
e x
k x k x k x
α = + ∆ ∆ −
− ∆ . (38)
Similarly, e y
α is evaluated by eliminating the dispersion error in direction by letting
and :
y θ =90
h k =k
(
)
(
)
2 2 2 cos
1
1 cos 6
e y
k y k y k y
α = + ∆ ∆ −
− ∆ . (39)
From (37), (38) and (39), it can observed that there is no choice of βxy(independent of θ) that
would completely eliminate the dispersion error. Instead, one can significantly reduce the
dispersion error by choosing:
2 2
2 2 2
2 y x xy
x y
x y k
α α
β = −⎛⎜ + ⎞ ∆ + ∆⎟
∆ ∆
⎝ ⎠ . (40)
The L-MAG coefficients in (38), (39) and (40) represent the original variant of the L-MAG
method. This ad-hoc choice of L-MAG coefficients can be significantly improved by systematic
procedure followed in the next section.
2.6 Systematic Design of L-MAG methods
In this section, the dispersion relation for the L-MAG methods (Equation (37)) is
systematically utilized to obtain a set of dispersion reducing methods with increasing accuracy
parameters α α βx, y, xy can be chosen independently). With the expectation of significantly
reducing dispersion in all the directions, we chose to eliminate dispersion errors along the mesh
lines (θ1 =0, 90θ2 = ), and along the direction perpendicular to the main diagonal
(
(
13 tan x/ y
)
)
θ = − −∆ ∆ . Three distinct equations are obtained by substituting
1, 2, 3
θ θ θ θ= ,
each of them is linear in α α βx, y, xy. These equations can then be solved to obtain the expressions for α α βx, y, xy in terms of k,∆ ∆x, y. As one would expect, the results for α αx, y
are given by (38) and (39). However, the expression for βxy takes a rather complex form that
would involve tricky computations. In order to simplify the computation for βxy, the
polynomial approximation based on Taylor’s expansion around k x∆ = ∆ =k y 0 is employed. For consistency purposes, αx and αy are approximated in a similar way. Such approximations
lead to a series of MAG methods. These methods are named as MAG2, MAG4, and
L-MAG6 reflecting the order of approximation (2, 4 or 6) used in Taylor’s expansion.
The parameters α α βx, y, xy as well as the associated dispersion errors for various L-MAG methods are shown in Table 2-1 (for lumped integration of mass matrix) and Table 2-2 (for
consistent integration). The tables also include parameters for GLSm and “Residual” methods,
since each of these methods can be represented using equivalent L-MAG methods with identical
dispersion properties.
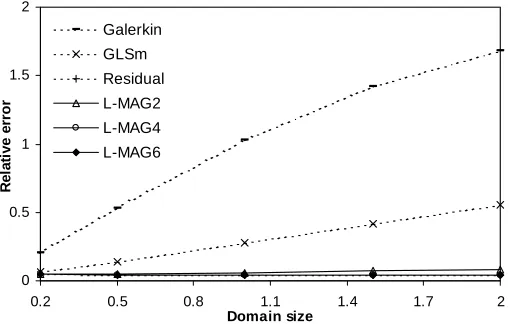
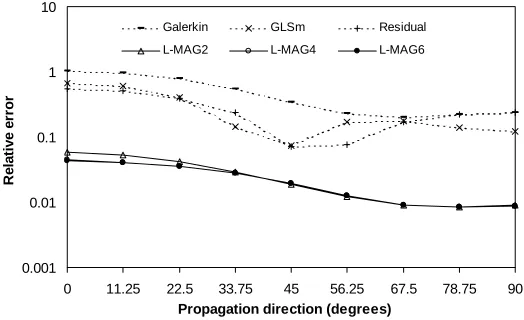
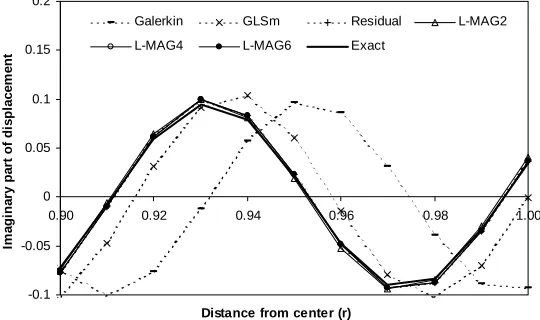
From the dispersion errors for various methods presented in Tables 2-1 and 2-2, we can
(a) For square meshes, all the L-MAG methods are superior to GLSm method. The
best available L-MAG method (L-MAG6) has almost identical error properties as the
best available dispersion reducing method (Residual method/GFEM).
(b) For rectangular meshes, the errors for all the L-MAG methods are considerably less
than any of the existing dispersion reducing methods.
(c) The second order method (L-MAG2) is a very simple modification of the Galerkin
method, and, although not as good as L-MAG6, is effective in reducing the
dispersion error for both rectangular and square meshes.
It thus appears that L-MAG framework resulted in a spectrum of dispersion reducing schemes
ranging from simple methods (L-MAG2) to highly accurate methods (L-MAG6).
2.7 Implementation of L-MAG Finite Element Methods
L-MAG FEM essentially differs from standard Galerkin FEM in that the coefficient matrix
in (9) is augmented with additional coefficient matrix arising from the MAG term:
, (41)
L MAG Gal L MAG
Aug
− = +
S S S −
where L MAG is the coefficient matrix arising from the MAG term and is given by:
Aug
−
S
L MAG
Aug x y xy
− = + +
S S S S , (42)
where,
2 2
, ,
, ,
x x
y y
x x
y y
α
α
β
∂ ∂
⎛ ⎞
= ⎜ ⎟
∂ ∂
⎝ ⎠
⎛∂ ∂ ⎞
= ⎜ ⎟
∂ ∂
⎝ ⎠
⎛ ∂ ∂ ⎞
=
N N S
N N S
N N
S