International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, Volume 2, Issue 3, March 2012)71
A Comparative Study of Routing Protocol in Vehicular Ad Hoc
Network
Pooja Duddalwar
1, Atul Deshmukh
2and S. S. Dorle
31Research Scholar, Department of Electronics & Telecommunication Engineering
G. H. Raisoni College of Engineering, Nagpur, (India)
2
Assistant Professor, Department of Electronics & Telecommunication Engineering G. H. Raisoni College of Engineering, Nagpur, (India)
3 Professor, Department of Electronics Engineering
G. H. Raisoni College of Engineering, Nagpur, (India)
2[email protected] 3[email protected]
Abstract—Routing protocols for vehicular ad hoc networks (VANETs) have attracted a lot of attention recently [4]. Vehicular Ad Hoc Networks (VANET) is a subclass of Mobile ad hoc networks which provides a differentiate approach for intelligent transport system (ITS). The routing protocols fall into two major categories of topology-based and position-based routing. The survey of routing protocols in VANET is important and necessary issue for smart ITS [5]. The chapter Firstly discusses concepts of VANET briefly, explores the inspiration behind their design and trace the evolution of these routing protocols analyzes and compares some different kinds of existing routing protocols in VANET, the advantages and restriction of different routing protocols, & finally pointing out some open issues and possible track of future research related to VANET routing.
Keywords—AODV, DSR, TORA, UMB, Vehicular Ad Hoc network.
I. INTRODUCTION
With the sharp increase of vehicles on roads in the recent years, driving has not stopped from being more challenging and dangerous. Roads are saturated, safety distance and reasonable speeds are hardly respected, and drivers often lack enough attention [7]. Without a clear signal of government agencies to develop solutions aimed at helping drivers on the roads by anticipating hazardous events or avoiding bad traffic areas.
One of the outcomes has been a novel type of wireless access called Wireless Access for Vehicular Environment (WAVE) dedicated to vehicle and vehicle-to-roadside communications [6], [7]. While the major objective has clearly been to improve the overall safety of vehicular traffic, promising traffic management solutions and on-board entertainment applications are also expected. When set with WAVE communication devices, cars and roadside units form a highly dynamic network called a Vehicular Ad Hoc Network (VANET), a special kind of Mobile Ad- Hoc Networks (MANETs). VANETs represent a particularly challenging class of MANETs. They are distributed; self-organizing communication networks formed by moving vehicles, and is thus characterized by very high node mobility.
II. NETWORK ARCHITECTURE AND CHARACTERISTICS
Three categories of network architecture of VANET are as follows.
-Pure cellular/WLAN, Pure Ad hoc and hybrid [6].
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, Volume 2, Issue 3, March 2012)72
(a) WLAN/Cellular
(b) Ad hoc
(c) Hybrid
Figure1: Three Categories of VANET Network Architecture
Information collected from Sensors on a vehicle can become valuable in notifying other vehicles about traffic condition and helping the police to solve the crime. Fig 1(b) [6] shows infrastructure-less network architecture which is in the pure ad hoc category where nodes perform vehicle-to-vehicle communication with each other. When there are roadside communication units such as a cellular tower and an access point and vehicles are equipped with wireless networking devices, vehicles can take advantage of the infrastructure in communicating with each other. Various applications in areas of urban monitoring, safety, driving assistance, and entertainment have used infrastructure communicating units to access dynamic and rich information outside their network context and share this information in a peer-to-peer fashion through ad hoc. The Fig 1(c) [6] shows hybrid architecture of cellular/WLAN and ad hoc approaches provides richer contents and greater flexibility in content sharing. Since the nodes are mobile so data transmission is less reliable and sub optimal.
Some of the distinguishing features of VANET which make it more challenging class of MANET are [6]: High Dynamic Topology: Since vehicles are moving at high speed, Topology formed by VANET is always changing.
Frequently disconnected network: The highly dynamic topology results in frequently disconnected network since the link between two vehicles can quickly disappear while the two nodes are transmitting information. Unlimited Battery Power and Storage: Nodes in VANET are not subject to power and storage limitation as in sensor networks. Nodes have sufficient amount of energy and computing power.
On Board Sensors: Nodes consists of sensors which provide useful information for routing in establishing a route, decision in forwarding, and action in maintaining the route or covering from routing failure.
Sufficient Energy and Storage: in VANET nodes are cars therefore nodes having sufficient amount of energy and computing power.
III. OVERVIEW OF ROUTING PROTOCOLS
A routing protocol governs the way that two communication entities exchange information; it includes the procedure in establishing a route, decision in forwarding and action in maintaining the route or covering from routing failure.
In VANET, the routing protocols are classified into five Categories: Topology based, Position based, Cluster based, Geocast, Broadcast as shown in Figure 2.
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, Volume 2, Issue 3, March 2012)73
1. Topology based Routing Protocol
These routing protocols use links’ information that exists in the network to perform packet forwarding. They can further be divided into proactive (table driven) and reactive (on-demand) routing.
1.1 Proactive routing Protocol
It carries the various features: the routing information such as the next forwarding hop is maintained in the background regardless of communication requests. Control packets are constantly broadcast and flooded among nodes to maintain the paths or the link states between any pair of nodes even though some of paths are never used. A table is then constructed within a node such that each entry in the table indicates the next hop node toward a certain destination. The advantage of the proactive routing protocols is that there is no route discovery since route to the destination is maintained in the background and is always available upon lookup. It also provides low latency for real-time application.
1.2. Reactive (On Demand)
Reactive routing opens a route only when it is necessary for a node to communicate with another node. It maintains only the routes that are currently in use, thereby reducing the weight on the network. Reactive routings typically have a route discovery phase where query packets are flooded into the network in search of a path. The phase completes when a route is found.
1.2.1 AODV+PGB
Preferred Group Broadcasting (PGB)[9]is a broadcasting mechanism that aims to reduce broadcast overhead associated with AODV’s route discovery and to provide route stability especially important in VANETs, where fast moving vehicles are used as wireless hosts. Based on the received signal of the broadcast, receivers can determine whether they are in the preferred group and which one in the group to broadcast. Since only one node is allowed to broadcast and since the preferred group is not necessarily the one that makes the most progress towards the destination, route discovery might take longer than before.
Another drawback is that broadcast can discontinue if the group is found to be empty Packet doubling can happen as two node in the preferred group can broadcast at the same time.
1.2.2 Temporally Ordered Routing Algorithm (TORA)
Temporally Ordered Routing Algorithm (TORA) routing belongs to a family of link reversal routing algorithms where a directed acyclic graph (DAG) toward the destination is built based on the height of the tree rooted at the source. The directed acyclic graph directs the flow of packets and ensures reachability to all nodes. When a node has a packet to send, it broadcasts the packet. Its neighbor only broadcasts the packet if it is the sending node’s downward link based on the DAG. A node would construct the directed graph by broadcasting a query packet. Upon receiving a query packet, if a node has a downward link to the destination, it will broadcast a reply packet; otherwise, it simply drops the packet. A node, upon receiving a reply packet, will update its height only if the height from the reply packet gives the minimum of all the heights from reply packets it has received so far. It then rebroadcasts the reply packet. The advantages of TORA are that the execution of the algorithm gives a route to all the nodes in the network.
1.2.3 DSR
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, Volume 2, Issue 3, March 2012)74
The second difference is that in AODV, route reply packets carry the DSR; route reply packets carry the address of each node along the route.
2. Position based Routing Protocol
Position based routing consists of class of routing algorithm. They share the property of using geographic positioning information in order to select the next forwarding hops. The packet is send without any map knowledge to the one hop neighbor which is closest to destination. Position based routing is beneficial since no global route from source node to destination node need to be created and maintained. Position based routing is broadly divided in two types: Position based greedy V2V protocols, Delay Tolerant Protocols.
2.1 Geographic Source Routing (GSR)
Earlier GSR has been used for MANET. Then it was improved to use in VANET scenario by incorporating in to it greedy forwarding of messages toward the destination. If at any hop there are no nodes in the direction of destination then GPSR utilizes a recovery strategy known as perimeter mode. The perimeter mode has two components one is distributed planarization algorithm that makes local conversion of connectivity graph into planar graph by removing redundant edges. Second component is online Routing algorithm that operates on planer graphs. So in VANET perimeter mode of GPSR is used. In GPSR if any obstruction or void occurs then algorithm enter perimeter mode and planner graph routing algorithm start operations, it involves sending the message to intermediate neighbor instead of sending to farthest node, but this method introduces long delays due to greater no. of hop counts. Due to rapid movement of vehicles, routing loops are introduced which causes dissemination of messages to long path.
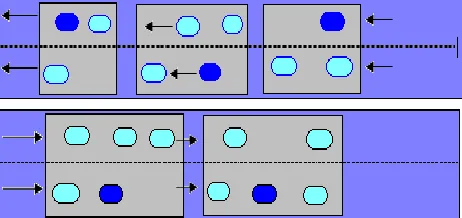
3. Cluster based Routing Protocol
In the Cluster Based Routing Protocol, routing is done using source routing. But this protocol uses also route shortening. When a node receives the reply of the destination to the source, it tries to find the farthest node in the route that is its neighbor. With this principle the route between source and destination can be reduced.
[image:4.612.330.561.325.434.2]Fig 3 [10] shows Cluster based routing protocol. If source node has to send data to the destination node, Source node sends route requests to all the neighboring cluster-heads, and only to the Cluster-heads. When a cluster-head receives the route request, it checks if the destination node is in his cluster. If this is the case, the cluster-head sends the request directly to the destination, but when Destination isn’t in the cluster, it sends the route request to all the adjacent cluster-heads. All cluster-head saves his address in the packet, so when a cluster-head receives a route request where his address is saved in the packet, it discards this packet. When the route request packet arrives at the destination, it replies back with the route that had been recorded in the request packet.
Figure 3: Cluster Based Routing Protocol
When the source doesn't receive a reply from the destination within a time period, it tries to send a route request again.
4 Broadcast Routing
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, Volume 2, Issue 3, March 2012)75
4.1 BROADCOMM Routing Protocol
BROADCOMM [6] is based on hierarchical structure for highway network. In BRAODCOMM the highway divided into virtual cells which move like vehicles. The nodes in the highway are organized into two level hierarchy: the first Level includes all the nodes in a cell, the second level is represented by cell reflectors, which are few nodes located closed to geographical centre of cell. Cell reflected behaves for certain interval of time as cluster head and handles the emergency messages coming from same members of the cell or nearby neighbor.
4.2 Urban Multihop Broadcast protocol (UMB)
UMB [3] is designed to overcome the interference, packet collision and hidden node problems during message distribution in multi hop broadcast. In UMB the sender node tries to select the farthest node in the broadcast direction for forwarding and acknowledging the packet without any prior topology information. UMB protocol performs with much success at higher packet loads and vehicle traffic densities.
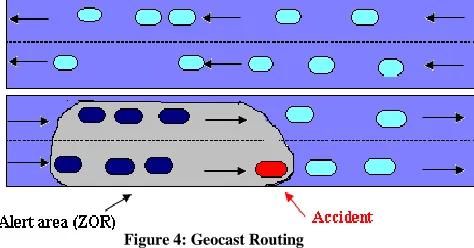
5. Geocast Routing
Geocast routing [8] is basically a location based multicast
[image:5.612.337.574.138.262.2]routing. Its objective is to deliver the packet from source node to all other nodes within a specified geographical region (Zone of Relevance ZOR). In Geocast routing as shown in figure 4 [10], vehicles outside the ZOR are not alerted to avoid unnecessary quick reaction. Geocast is considered as a multicast service within a specific geographic region. Normally defines a forwarding zone where it directs the flooding of packets in order to reduce message overhead and network congestion caused by simply flooding packets everywhere. In the destination zone, unicast routing can be used to forward the packet.
Figure 4: Geocast Routing
One pitfall geocast is network partitioning and also unfavorable neighbors which may hinder the proper forwarding messages. The various geocast routing protocols are IVG, DG-CASTOR and DRG.
IV. CONCLUSIONS
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, Volume 2, Issue 3, March 2012)76
The future perspectives for VANET routing protocols should also include following.
1. A major challenge in protocol design in VANET is to improve reliability of Protocols and to reduce delivery delay time and the number of packet retransmission.
2. Driver behavior should be considered for designing of delay bounded routing protocols since carry and forward is the mainly approach to deliver packets.
TABLEI
SUMMARY OF DIFFERENT ROUTING PROTOCOL IN VANET
Routing Protocol Type Subtype Overhead Mobility Model Propagation Model
AODV Topology based
Reactive Path states IDM on Manhattan Grid, Videlio, MTS
Road blocking, Probabilistic shadowing
AODV +PGB Topology based
Reactive Path states MTS Probabilistic shadowing
TORA Topology based
Reactive Path states IDM on Manhattan Grid
Unknown
DSR Topology
based
Reactive Path states IDM on Manhattan Grid, Videlio, MTS
Road blocking
GSR Position based Non DTN overlay
Beacons Videlio, MGrid Mobility
Road blocking
BROADCOMM Broadcast - Path states MGrid Mobility Unknown
UMB Broadcast - Path states MGrid Mobility Unknown
References
[1] Yu Wang and Fan Li, “Vehicular Ad Hoc Networks” in Guide to Wireless Ad Hoc Networks, Computer communication and Networks, DOI 10.1007/978- 84800-328-6_20.
[2] K. M. Z. Mo, H. Zhu and N. Pissinou, “MURU: A Multi-Hop Routing Protocol”, California, USA, pp. 1-8, 17-21 July 2006.
[3] G. Korkmaz, E. Ekici , F. Özgüner, and Ü. Özgüner, “Urban multi-hop broadcast protocol for inter-vehicle communication systems,” in ACM International Workshop on Vehicular Ad Hoc Networks, pp. 76–85, 2004.
[4] “Linear Regression-Based Delay-Bounded Routing Protocols for Vehicular Ad Hoc Networks” by Yuh-Shyan Chen Chih-Shun Hsu Yi-Guang Siao Dept. of CSIE, Nat. Taipei Univ., Taipei, Taiwan,
[5] “Routing Protocols in Vehicular Ad Hoc Networks” Yuh-Shyan - National Taipei University, Taipei, Taiwan, R.O.C.Chen Yun-Wei Lin National Taipei University, Taipei
[6] “Survey of Routing Protocols in Vehicular Ad Hoc Networks” by Kevin C. Lee, UCLA, USA , Uichin Lee, UCLA, USA Mario Gerla, UCLA, USA.
[7] “Enhanced Perimeter Routing for Geographic Forwarding Protocols in Urban Vehicular Scenarios” by Kevin C. Lee , Jer´ ome H ˆ aerri, ¨ Uichin, Lee Mario Gerla.
[8] C. Maihöfer, “A survey of geocast routing protocols,” IEEE Communications Surveys & Tutorials, vol. 6, no. 2, pp. 32–42, 2004.
[9] C.E. Perkins and E.M. Royer, “Ad-hoc on demand distance vector routing,” in Proceedings of the 2nd IEEE Workshop on Mobile Computing Systems and Applications, pp. 90–100, Feb. 1999.
[10] “Routing in Vehicular Ad Hoc Network: A Survey” by Fan Li and Yu Wang, University of North Carolina at Charlotte
[11] D. B. Johnson and D.A. Maltz, “Dynamic source routing in ad hoc wireless networks” in Mobile Computing, vol. 353.