International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459,ISO 9001:2008 Certified Journal, Volume 5, Issue 10, October 2015)
385
Evolutionary Algorithms for Two Area Load Frequency Control
Problem
A. Anil Kumar
1, A. Rahiman
2, V. Ashok Kumar
3 1,2,3Asst. Professor, VVIT, Nambur, Andhra Pradesh, INDIA.Abstract— This paper presents use of evolutionary algorithm techniques to study the load frequency control of interconnected power system. In the proposed scheme a control methodology is developed using Particle Swarm Optimization based Decentralized controller and Genetic Algorithm Based Decentralized Controller for interconnected thermal-thermal power system. These control strategies guarantees that the steady state error of frequencies and Tie Line powers are maintained in a given tolerance limitations. The performances are simulated using Matlab/Simulink package. A comparative study of conventional integral controller, PSO based Decentralized Controller and Genetic Algorithm based Decentralized Controller is made for 1% change in positive load
Keywords— Load Frequency Control, Area Control Error, Conventional Integral Control, Particle Swarm Optimization, Genetic Algorithms.
I. INTRODUCTION
Areas or regions of coherent generators groups always exist in large-scale power systems. These various areas are interconnected through tie lines. The tie lines are used to exchange energy between areas and to provide inter-area support in case of abnormal conditions [1, 2]. Area load-changes and abnormal conditions, such as outages of generation, lead to mismatch in scheduled power interchanges between areas. As a result of load changes in system with high capacity and close interconnection among generation areas, large tie-line power fluctuations and frequency oscillations occur. This observation suggests a Strong need to establish a more effective load frequency controller (LFC
)
The conventional control strategy for the LFC problem is based on the injection of a corrective control signal into the governor summing point using a fixed gain integral “I” controller. This controller is usually fed with the area control error signal which is a weighted sum of the tie power and the frequency deviation. The integral controller provides zero steady state frequency deviation but it exhibits poor dynamic performance.
In addition fixed gain controllers are designed at nominal operating conditions, but in power system load changes from time to time so this control fail to provide best Performance over a wide range of operating conditions. Therefore there is a need of a controller which can overcome this problem.
The Evolutionary techniques like that Particle Swarm Optimization and Genetic Algorithms providing rather promising results than integral controller. The salient feature of these techniques is that they provide a model- free description of control systems and do not require model identification. Recently, Evolutionary Algorithms application to power system is rapidly developing especially power system stabilization problem as well as load frequency control problem [9-13]. The majority of the Proposed controllers are based on scheduling the “I” term gain.
Particle Swarm Optimization is an exciting new methodology in evolutionary computation and a population based optimization tool like GA. PSO is motivated from the simulation of the behavior of social systems such as fish schooling and birds flocking. The PSO algorithm requires less memory because of its inherent simplicity. PSO is similar to the other evolutionary Algorithms in that the system is initialized with a population of random solutions, call particle (swarm), flies in the d-dimension problem space with a velocity, which is dynamically adjusted according to the flying experiences of its own and colleagues. Swarms collect information from each other through an array constructed by their positions using the velocity of particles. Position and velocity are both updated by using guidance from particles‟ own experience and experience of neighbors.
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459,ISO 9001:2008 Certified Journal, Volume 5, Issue 10, October 2015)
386
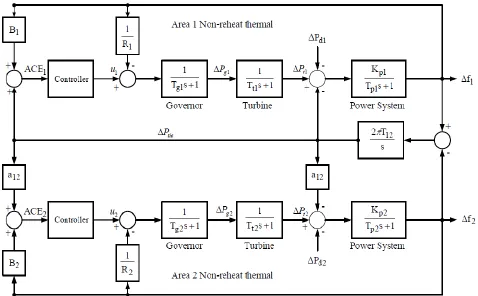
II. TWO AREA MODEL
The detailed block diagram modeling of two area thermal-thermal power system for load frequency control investigated is shown in figure 1. Each area is assumed to have only one equivalent generator and is equipped with governor- turbine system. The load flow controller shown in Fig. 1 is based upon tie-line bias control, where each area tends to reduce the Area Control Error (ACE) to zero. The ACE given in Eq. (1) for each area consists of a linear combination of frequency and tie-line power deviation [1]
ACEi = ∆Ptie + Bi∆fi , i=1,2,… (1)
An overall satisfactory performance is achieved when Bi
is selected to be equal to the frequency bias factor of that area. So
B
i= D
i+ (1/R
i) i = 1, 2
Where D is the damping coefficient and R is the speed regulation constant.
The parameters of the two area system are given in the Appendix
The conventional “I” controller is in the form of
G1(s)=K1/s and G2(s)=K2/s for area 1 and area 2 respectively. The system response having the integral controller gains (K1 and K2) usually satisfies the desired objectives of the LFC. The only problem of this type of controller is that the system response is less damped and the overshoot is large.
To overcome this problem, PSO based Decenralized controller and genetic algorithm based decentralized controller is proposed to replace the conventional “I” controller.
III. GENETIC ALGORITHM AND ITS APPLICATION TO TWO
AREA LFCPROBLEM
Genetic algorithm is used to optimize the objective function of the given system which is mainly based on the search technique via operations observed in natural selection and genetics of the system.[17] and [14-16] Genetic algorithms are more likely to converge to the global optima than conventional optimization technique, since they search from a population of points, and are based on probabilistic transition rules. The different GA operators are –
Objective function
The objective function is to minimization the performance index namely the integral of time – multiplied absolute value of the error (ITAE) [17], which is given by,
S = Min
0
t
.
ACE
iAnd the Fitness function used for selecting the population of chromosomes.
Fitness function =
ITAE
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459,ISO 9001:2008 Certified Journal, Volume 5, Issue 10, October 2015)
[image:3.612.71.549.146.442.2]387
Fig. 1. Two area load frequency control model
Reproduction
Selection is the process of selecting the population from the current population which will survive for the next generation population for next process of the Genetic Algorithms. In this paper we select the Roullete Wheel selection process for the selection or reproduction of the next generation population. The brief study has been performed in past some decade [19]
Crossover
Crossover is also known as recombination of the population or reshuffled the selected population. Here, we select two random selected population & then we choose random site & interchanged the individual chromosomes with each other and finally produced the new off spring, and we proceed for next process. The performed analysis is studied [19].
Mutation
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459,ISO 9001:2008 Certified Journal, Volume 5, Issue 10, October 2015)
388 Structure of Genetic Algorithms –
Fig.2 Genetic Algorithm flow chart
IV. PARTICLE SWARM OPTIMIZATION &ITS APPLICATION
TO TWO AREA LFC PROBLEM
Particle swarm optimization (PSO), originated by James Kennedy and R.C. Eberhart in 1995. It is a stochastic (connection of random variable) evolutionary computation method used to is based on swarm behavior, is a population based technique. The bird generally follows the shortest path for food searching. Based on this behavior, this algorithm is developed. It uses a number of particles where every particle is considered as a point in N-dimensional space. Each particle keeps on accelerating in the search space depending on the knowledge it has about the appreciable solution comparing its own best value and the best value of swarm obtained so far. It is welldescribed by the concept of social interaction because each particle search in a particular direction and by interaction the bird with best location so far and then tries to reach that location by adjusting their velocity this require intelligence.
Given below are the two main equations of PSO algorithm:
Velocity modification equation
= W + C1 Randi1* (pbesti - )+ C2Rand2
*(gbesti - )
= Velocity of agent I at iteration k
W = Weighing Function
Ci = Weighing Factor
Randi = Random number between 0-1
pbesti = p-best agent of i
= current position of agent I at iteration k
gbesti = g-best of the group
In the above equation W the first term is inertia component responsible for movement of particle in the direction it was previously then it speed up the convergence otherwise encourage exploration.
Second term: C1 Randi1* (pbesti - ) is the cognitive
component act as particle‟s memory
Third term: C2Rand2 *(gbesti - ) he social component
which is the reason why the particle move to best region found so far by the swarm.
Once the calculation for velocity of each particle is done then position can be updated using equation of position modification. Position modification equation:
= +
Where , are modified and current search
points respectively.
= Modified velocity
This process is repeated unless until stopping criteria is achieved
V. PSOBASED CONTROLLER DESIGN
The objective function is to minimization of the performance index namely the integral of time – multiplied absolute value of the error (ITAE) [22], which is given by,
S = Min
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459,ISO 9001:2008 Certified Journal, Volume 5, Issue 10, October 2015)
389
Step1: The initial particles are set to some linear position in the range of Ki.
Step2: Their velocities are set to zero. Step3: Initial ITAE is set to some values.
Step4: Evaluate the ITAE for the particles at their corresponding positions.
Step5: Initialize pbest for each particle. Step6: Find gbest based on minimum ITAE. Step7: Start iteration 1.
Step8: Update the positions.
Step9: Then calculate ITAE at their corresponding position. Step10: Accordingly update pbest and gbest based on ITAE.
Step11: Update velocity. Step12: Iteration=iteration+1.
Step13: If iteration<=maximum iteration, go to step 8 otherwise continue.
Step14: The obtained gbest is the optimum set of parameters of PI controller.
VI. SIMULATION RESULTS
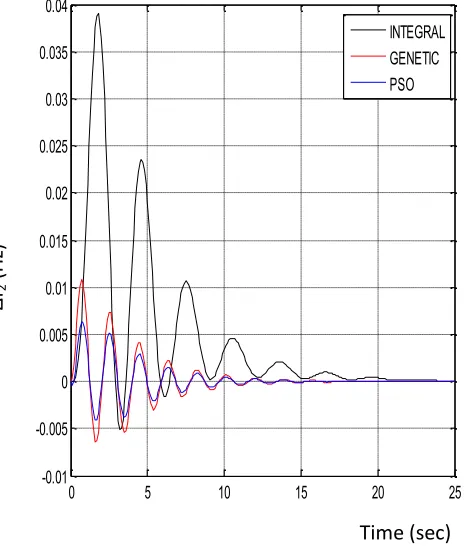
A comparative study between three controllers; Integral controller, the GA based decentralized controller and PSO based decentralized controller; is premeditated in this part. The time-domain simulations of the two power area are performed using Matlab/Simulink. The simulations consider the effect of the integral controller, the GA controller and the PSO Controller.
The system is exposed to a positive load disturbance of 0.01pu on area1. The dynamic response of frequency deviations for area1; ∆f1 and area2; ∆f2 and tie line power
∆Ptie are shown in Fig.4, Fig.5, and Fig.6 for three
controllers.
0 5 10 15 20 25
-0.03 -0.02 -0.01 0 0.01 0.02 0.03 0.04 0.05
INTEGRAL GENETIC PSO
Fig.3 Area1 frequency deviation due to area1 disturbance
∆
f
1(Hz
)
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459,ISO 9001:2008 Certified Journal, Volume 5, Issue 10, October 2015)
390
0 5 10 15 20 25
-0.01 -0.005 0 0.005 0.01 0.015 0.02 0.025 0.03 0.035 0.04
[image:6.612.45.277.153.426.2]INTEGRAL GENETIC PSO
Fig.4 Area2 frequency deviation due to area 1disturbance
0 5 10 15 20 25
-14 -12 -10 -8 -6 -4 -2 0 2x 10
-3
INTEGRAL GENETIC PSO
[image:6.612.328.568.154.402.2]Fig.5. Tie line power deviation due to area 1 disturbance
Table 1
Comparative study of peak overshoots
Controller ∆f1(Hz) ∆f2(Hz) ∆PTIE12 (pu
MW)
Integral -0.0234 0.039 -0.01264
GA -0.0145 0.0109 -0.0027772
PSO -0.0109 0.0063 -0.0019906
Table 2
Comparative study of settling time
VII. CONCLUSION
A simulation result shows that PSO based Decentralized Controller providing better dynamic performance and faster settling time compared to other two controllers The main advantage of PSO is Only algorithm that does not implement the survival of the fittest hence entire population is member throughout the process. PSO unlike GA is not affected by size of the problem. The shortcoming of GA i.e. premature convergence is overcome by PSO. However GA based decentralized controller providing better dynamic response and better settling time compared to conventional fixed gain integral controller. To view a complete picture about the performance of the PSO based Decentralized controller a set of simulation experiments are conducted to assure the robustness of the PSO controller under different disturbance magnitude. Disturbances of 0.05, 0.10, 0.15pu. Load disturbance are applied to area 1 each at a time. For every disturbance magnitude PSO based Decentralized Controller providing better dynamic response and fast settling time.
Controller ∆f1(Sec) ∆f2(Sec) ∆PTIE12 (Sec)
Integral 22 23 25
GA 13.5 14 15
PSO 12 12.2 13.8
∆
f
2(Hz
)
Time (sec)
Time (sec)
∆
P
tie(pu
M
W
[image:6.612.54.278.447.685.2]International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459,ISO 9001:2008 Certified Journal, Volume 5, Issue 10, October 2015)
391 Appendix
Table 3:
Parameters of the two power area
Parame ters
Area1 Area2
TP 20 Sec 20 Sec
TG 0.08 sec 0.08 sec
TT 0.30 sec
Sec
0.30 sec
R 2.40
Hz/p.u. MW
2.40 Hz/p.u. MW
KP 120
Hz/p.u. MW
120 Hz/p.u. MW
T12 0.0707
Sec
a12 -1
Table 4:
Parameter Values tuned for PSO Algorithm
Parameters Values
Population Size 11 No of Iterations
Iterations
50 Cognitive Coefficient 0.8 Social Coefficient 2
Nomenclature
ΔPG = Generated power derivation, pu MW.
ΔPD = Change in power demand, pu MW.
ΔPC = Change in speed changer position
(u), pu MW.
Δf = Derivative in frequency, Hz. KP = Static gain of power system inertia
Dynamic block, Hz/puMW. TP = Time constant of power system
Inertia dynamic block, sec. TG = Governor time constant, sec.
TT = Turbine (non reheat type) time
Constant, sec.
R = Speed regulation parameter, Hz/pu MW. REFERENCES
[1] Reddoch, P., Julich, T. Tan, and Tacker, E., ―Models and Performance Functional for Load Frequency Control in Interconnected Power Systems,” IEEE Conf. on Decision and Control, Florida, Dec. 1971.
[2] O. P. Malik, A. Kumar, and G. S. Hope, “A load frequency control algorithm based on a generalized approach,” IEEE Trans. Power Sys.., vol. 3, (2), pp. 375- 382, 1988.
[3] T. HIYAMA,”Design of Decentralized Load Frequency Regulators for Interconnected Power Systems,” IEEE Proc., Vol. 129, Part. C,.(1), pp. 17-23, 1982.
[4] Aldeen, M.,” A Fresh Approach To the LQR Problem with Application to Power Systems,” Proc. of Int. Power Engineering Coif., Singapore, Vol. 1, pp374-379, 1993.
[5] Bekhouche, N., and Feliachi, A, “Decentralized Estimation for the Automatic Generation Control Problem in Power Systems,” First IEEE Conference on Control Applications, Vol. 2, pp 626-631, 1992.
[6] Aldeen, M., and Trinh, H., “Load-Frequency Control of Interconnected Power Systems Via Constrained Feedback Control Schemes,” Computer & Electrical Engineering , Vol. 20, No. 1, pp71-88, 1994.
[7] Djukanovic, M., et. al., “Conceptual Development of optimal load frequency control using artificial neural networks and fuzzy set theory,” Int. J. of Engineering Intelligent Systems for Electrical Engineering & Communication, Vol. 3,Part 2,pp.95-108,1995. [8] El-Metwally, K., & Malik, O. “Application of fuzzy-logic stabilizers
in a multi-machine environment”, IEE Proceedings of the generation, transmission, and distribution, 143(3), 263–268, 1996. [9] M.A. Panduro et al, “A comparision of Genetic algorithm, Particle
Swarm Optimization and the Differential Evolution methods for the design of Scannable circular antenna arrays”, Progress in Electromagnetic Research, Vol.No.13, pp171-186, 2009.
[10] Haluk GOZDE et al, PSO based Load Frequency Control in a single area power system, University of Pitesti, Scientific Bulletin, Vol.2,No.8, 2008, pp106-110.
[11] Karnavas,K.L. and Papadopoulos, D.P, “AGC forautonomous power system using combined intelligent techniques”. Electric PowerSystem Research , 2002,62: 225-239.
[12] Zwe-Lee Gaing, “A particle Swarm Optimization approach for optimum design of PID controller in AVR system”, IEEE Transactions on Energy Conversion, Vol.19, No.2, 2004, pp384-391.
[13] Subramanyam B and Veera Reddy V C, New control strategy for LFC problem, IEEE International Conference on ECCC held at Hotel Taj International, New Delhi, (1991).
[14] A.Y.Abdelaziz, M.A. El-Sharkawy “Optimal allocation of TCSC device using using genetic algorithms” Cario University, Egypt, Dec.19-21, 2010.
[15] R.Mamatha, D.Devraray “genetic algorithm approach for optimal power flow with facts device”2008,IEEE-conferenceon „intelligent system‟.
[16] Ibraham, Omveer Singh, Namuail Hassan “Genetic Algorithms based scheme for optimization of AGC gains of interconnected power system” Journal of theoretic & applied information technology 2005-2009.