COMPARISON OF SOME
OPTIMIZATION TECHNIQUES FOR
EFFICIENCY OPTIMIZATION OF
INDUCTION MOTOR
A. S. SINDEKAR
Associate Prof. and Head Dept. of Electrical Engineering, Govt. College of Engg. Amravati 444604
Maharashtra, India [email protected]
A. R. AGRAWAL
PG Scholar
Dept. of Electrical Engineering, Govt. College of Engg. Amravati 444604
Maharashtra, India
Dr. V. N. PANDE
Associate Professor Dept. of Electrical Engineering, Govt. College of Engg. Pune 411005
Maharashtra, India [email protected]
Abstract
This paper carries out efficiency optimization of 2.2 kW, 400 V, 1500 synchronous r.p.m., 3- phase squirrel cage
induction motor using genetic algorithm, pattern search, simulated annealing, interior point (constrained nonlinear minimization) and particle swarm method. The results obtained by each method are arranged in a tabular form, to have a comparison between the five techniques used for optimization. On the basis of results obtained by each method, best method out of those five is stated in the conclusion part.
Keywords: Pattern search, Genetic algorithm, Simulated annealing, Interior point, Particle swarm, Induction motor
1) Introduction
Induction motors are generally used in domestic, commercial and various industrial applications. Mostly, squirrel cage motors are preferred because of its simple and robust construction. As a result of this wide use, induction motors consume almost 60% of overall electricity produced, so minimization of electricity consumption through a better motor design is of much importance. For a good overall design, motor efficiency, torque produced and cost are some major concern to be optimized. Out of these three, motor efficiency plays an important role in saving considerable amount of electricity, so efficiency is chosen as an objective function for optimization. There are so many parameters involved in designing an induction motor, most of which are non-linear in nature. It is not possible to take derivative of such non-non-linear parameters every time, because of this standard non linear optimization methods becomes tedious and time consuming. On the other hand some optimization techniques like genetic algorithm, pattern search, simulated annealing, particle swarm and interior point method do not require derivative of variables and are less time consuming as well, in comparison with the non linear optimization methods. Thus these five methods are used in this paper for optimizing the efficiency of motor with the help of MATLAB.
2) Overview of Optimization Techniques a) Genetic Algorithm(GA):
b) Simulated Annealing (SA):
It is a generic and probabilistic method for global optimization problems. SA gives a good approximation to the global optimum of a given function, in a large search space. It is often used when the search space is discrete. For certain problems, simulated annealing may be more efficient than exhaustive enumeration, provided that the goal is merely to find an acceptably good solution in a fixed amount of time, rather than the best possible solution. The name and inspiration come from annealing in metallurgy, a technique involving heating and controlled cooling of a material to increase the size of its crystals and reduce their defects, both are attributes of the material that depend on its thermodynamic free energy [13].
c) Pattern Search (PS):
It is a family of numerical optimization methods that do not require the gradient of the problem to be optimized. Hence PS can be used on functions that are not continuous or differentiable. Such optimization methods are also known as direct-search, derivative-free, or black-box methods [7].
d) Interior Point:
The interior point algorithm is used for general nonlinear optimization. It is especially useful for large-scale problems that are discrete or continuous, and tolerates user-defined objective and constraint function’s evaluation failures. It is based on a barrier function, and optionally keeps all iterates strictly feasible with respect to bounds during the optimization process [9].
e) Particle Swarm:
Particle swarm optimization (PSO) is a computational method that optimizes a problem by iteratively trying to improve a candidate solution with regard to a given measure of quality. PSO optimizes a problem by having a population of candidate solutions, known as dubbed particles, and these particles are moved in the search-space according to simple mathematical formulae over the particle's position and velocity. Each particle's movement is influenced by its local best known position and is also guided toward the best known positions in the search-space, which are updated as better positions, found by other particles. This process is carried out to move the swarm toward the best solutions [10].
3) Problem Formulation
a) Objective function:
Efficiency minimization is the main objective which mainly depends on losses. Efficiency can be easily calculated if the losses occurring (such as copper losses, iron losses, friction and windage losses etc.) and output of the motor is known. However for considering the additional losses such as harmonic losses, pulsation losses, 0.5 is deducted from the equation for efficiency. So the required objective function will be:
Efficiency fun y = output output + losses
Efficiency [fun(y)] = kW×1000
kW×1000 + total loss× 100 - 0.5 (1)
b) Design variables:
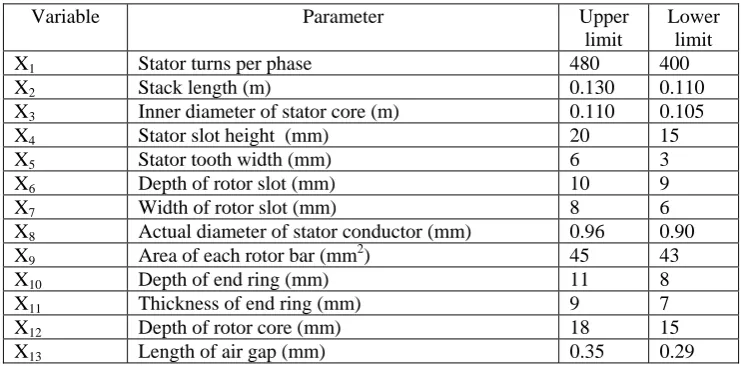
Practically there are many parameters in induction motor design which can be considered as design variables. Some important independent variables are selected as design variables and are assigned from X1 to X13 with
their upper and lower bounds [9].
Table 1: Design Variables
Variable Parameter Upper limit
Lower limit
X1 Stator turns per phase 480 400
X2 Stack length (m) 0.130 0.110
X3 Inner diameter of stator core (m) 0.110 0.105
X4 Stator slot height (mm) 20 15
X5 Stator tooth width (mm) 6 3
X6 Depth of rotor slot (mm) 10 9
X7 Width of rotor slot (mm) 8 6
X8 Actual diameter of stator conductor (mm) 0.96 0.90
c) Inequality constraints:
Some important performance parameters [5] are considered with their upper and lower bounds [9] as inequality constraints. The performance parameters are taken as constraints only to have a practical optimal design (feasible design), which has an optimal value of motor efficiency with all other performance parameters within the specified limits.
Table 2: Performance Constraints (limits)
4) Execution
Classical design of induction motor is carried out with MATLAB. Simple program is written for obtaining all the required design parameters. The value of efficiency which is our objective function is calculated without applying any optimization technique (classically) then with the help of MATLAB tool box efficiency is optimized using GA, PS and SA. For efficiency optimization using interior point and particle swarm method, MATLAB program is written.
5) Results
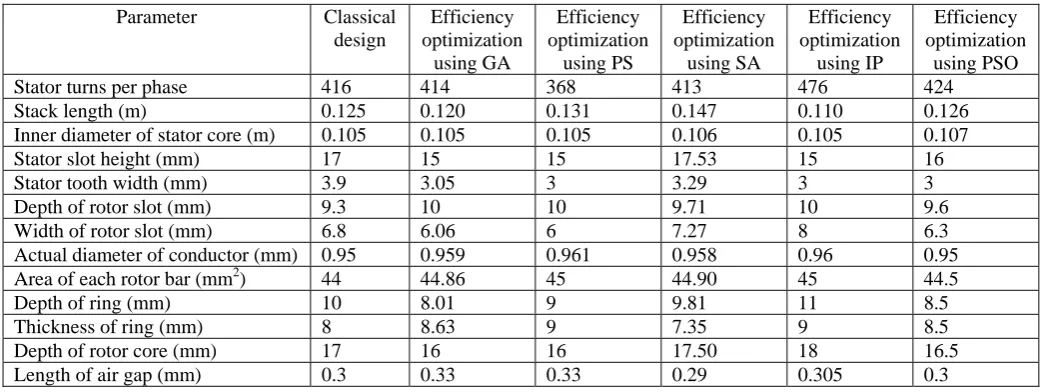
Table 3 gives values of all thirteen design variables in a comparative manner, for ex. value of X1 is given for
classical design and then it is compared with the values obtained, after using all five optimization techniques one by one. In table 4, value of efficiency for a classical design and value of efficiency obtained after applying each optimization technique is compared. Some more performance parameters apart from efficiency are also shown in a comparative manner in table 4.
Table 3: Comparative values of design variable
GA: Genetic Algorithm PS: Pattern Search SA: Simulated Annealing IP: Interior Point PSO: Particle Swarm Optimization
Variable Parameter Upper limit
Lower limit
b1 Efficiency (%) 90 80
b2 Power factor 0.9 0.8
b3 Full load slip (%) 6 3
b4 Rotor bar current density (A/mm2) 6 4
b5 Stator current density ( A/mm2) 5 3.9
b6 Starting current (A) 19 15
b7 Starting torque (N-m) 17 14
Parameter Classical design
Efficiency optimization
using GA
Efficiency optimization
using PS
Efficiency optimization
using SA
Efficiency optimization
using IP
Efficiency optimization
using PSO
Stator turns per phase 416 414 368 413 476 424
Stack length (m) 0.125 0.120 0.131 0.147 0.110 0.126
Inner diameter of stator core (m) 0.105 0.105 0.105 0.106 0.105 0.107
Stator slot height (mm) 17 15 15 17.53 15 16
Stator tooth width (mm) 3.9 3.05 3 3.29 3 3
Depth of rotor slot (mm) 9.3 10 10 9.71 10 9.6
Width of rotor slot (mm) 6.8 6.06 6 7.27 8 6.3
Actual diameter of conductor (mm) 0.95 0.959 0.961 0.958 0.96 0.95
Area of each rotor bar (mm2) 44 44.86 45 44.90 45 44.5
Depth of ring (mm) 10 8.01 9 9.81 11 8.5
Thickness of ring (mm) 8 8.63 9 7.35 9 8.5
Depth of rotor core (mm) 17 16 16 17.50 18 16.5
Table 4: Comparative values of performance parameter
GA: Genetic Algorithm PS: Pattern Search SA: Simulated Annealing IP: Interior Point PSO: Particle Swarm Optimization
6) Conclusion
A motor design with highest efficiency amongst all is obtained after using pattern search technique for optimization and that to with a good power factor.
The design obtained after using PS has least slip amongst all four designs and least starting current as well, but it is the most expensive design amongst all.
For implementing the designs obtained after using GA, PS, SA, interior point and PSO, new stator and rotor stampings are to be made according to the new dimensions obtained. Same stator and rotor stampings can be used for designs obtained by GA and PS.
All five optimized designs can be assembled (fabricated) in the frame size ‘D100L’ which is also used for assembling the classically designed motor.
The design obtained after using PSO offers an improved efficiency (apart from the efficiency given by PS) and that to with the least cost amongst all six designs.
PSO is the best method for optimization in comparison with PS, SA, GA and interior point, if efficiency and cost both are to be optimized.
On the other hand, if efficiency alone is the priority then PS will be the best optimization technique amongst all five.
References
[1] J. Appelbaum, E.F. Fuchs and I.A. Khan, “Optimization of Three-Phase Induction Motor Design Part II: The Efficiency and Cost of Optimal Design”, IEEE Transactions on Energy Conversion, Vol. EC-2, No. 3, September 1987
[2] Li Han, Hui Li, Jingcan Li, Jianguo Zhu, “Optimization for Induction Motor Design by Improved Genetic Algorithm”, Australasian Universities Power Engineering Conference, pp 26-29 September 2004
[3] Shivendra Prakash Verma, “Design Optimization of 7.5 kW, 4 Pole, 3-Phase, 50 Hz Induction Motor Employing Genetic Algorithm / Improved Genetic Algorithm Using Sweep Frequency Response Analysis”, MIT International Journal of Electrical and
Instrumentation Engineering Vol. 1, No. 2, Aug. 2011, pp 108-115 ISSN 2230-7656© MIT Publications.
[4] S. Ghozzi, K. Jelassi, X. Roboam, “Energy Optimization of Induction Motor Drives”, IEEE Conference on Industrial Technology, 2004
[5] J. Faiz, M.B.B. Sharifian, “Optimal Design of Three Phase Induction Motors and Their Comparison with a Typical Industrial Motor”, Int. J. of Comp. and Elect. Engg. Eng. 27:133-144, 2001
[6] X. Liu, G. R. Slemon, “An Improved Method of Optimization for Electrical Machines”, IEEE Trans. on Energy Conversion, Vol. 6, no. 3, pp 492-496, sep. 1991
[7] D. Popovic and A. R. Teel, “Direct Search Method for Nonsmooth Optimization” IEEE Conference on Decision and Control, vol. 3, pp 3173-3178
[8] M. Ramamoorty, “Computer Aided Design of Electrical Equipment”, Affilated East West Press Private Limited, New Dehli, 1987, pp 1 -4, 86-94
[9] R. Ramarathinam, B. G. Desai, “Optimization of Poly-phase Induction Motor Design: A Nonlinear Programming Approach”, IEEE Trans. Power Apparatus and Systems, Vol. PAS-90, No. 2, Mar. / Apr. 1971, pp. 570-578.
[10] R. H. A. Hamid, A. M. A. Amin, R. S. Ahmed, A. El-Gammal, “New Technique for Maximum Efficiency of Induction Motors Based on PSO”, IEEE Conference Proceedings, 2006, pp. 2176-2181.
[11] C. Thanga Raj, S. P. Srivastava, Pramod Agarwal, “Optimal Design of Poly-Phase Induction Motor Using Improved Particle Swarm Optimization”, XXXII National Systems IEEE Conference, NSC 2008, December 17-19, 2008
Parameter Classical design
Efficiency optimization
using GA
Efficiency optimization
using PS
Efficiency optimization
using SA
Efficiency optimization
using IP
Efficiency optimization
using PSO
Efficiency (%) 81.3 84 85.21 83.5 83.48 84.25
Power factor 0.829 0.85 0.90 0.89 0.9 0.84
Full load slip (%) 5.6 3.26 3 3.03 5 4.8
Rotor bar current density (A/mm2) 4 4 4 5.66 6 5.25
Stator current density (A/mm2) 3.9 3.91 3.9 3.99 4.1 4
Starting current (A) 18.86 18.50 17.64 17.70 17.68 17.75
Full load torque (N-m) 15 14.9 14.8 15 15.02 15.1
Starting torque ( N-m) 15 14.85 14.78 14.98 15.02 15.1
[15] K. Sawhney, “A Course in Electrical Machine Design”, Dhanpat Rai and Sons, New Delhi, 5th Edition, 1991, pp 10.1-10.97, 22.1-22.7
[16] P. J. M. van Laarhoven and E.H.L. Aarts, “Simulated Annealing: Theory and Application”, Kluwer Academic Publishers, Netherlands, 1992