International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459,ISO 9001:2008 Certified Journal, Volume 2, Issue 12, December 2012)
157
MATLAB Based Response of Systems Using Auto Tune PID
Controller
S. S. Gade
1, S. B. Shendage
2, M. D. Uplane
31
BIGCE, Solapur Maharastra, India
2 PVPIT, Budhgaon Maharastra, India 3 Shivaji University, Kolhapur, Maharastra, India
Abstract—This paper covers practical study of responses
of the systems which are under control. The auto tune proportional-integral – derivative (PID) controller is used for controlling of systems. The auto tune algorithm is implemented using the successive approximation method. The auto tuner has been checked with various plant models in MATLAB environment that causes only minor perturbation on the normal operation of the process. The system responses of proposed method for automatic selection of the PID constants are also discussed. The accuracy and performance of this auto-tuning method have been substantiated by extensive lab works.
Keywords—Auto tuning, PID Controller, successive
approximation method
I. INTRODUCTION
Proportional Integral Derivative (PID) controllers are widely used in the industrial and non industrial applications to control the plant for achieving the desired plant output. The desired plant output is known as Set Point (SP) and the controller continuous monitoring the plant output for the SP by observing the Process Value (PV). The controller output varies with difference between SP and PV usually it is called as error (e). Larger the error maximum will control signal and thus vice versa. Proportional term varies with proportional gain (Kp) times error. The proportional gain is having remarkable impact on the PID controller output. Larger the value of proportional gain led to unstable oscillatory system and smaller the proportional gain, slower is the response of controller. Hence, optimum value of proportional gain is desirable that could improve the response of system and overall stable control action. Integral term improves the steady state response of control action. Larger the value of integral gain (Ki), poor is the controller response. Slower control response is undesirable and hence, response can improved with the addition of derivative term in the PI controller. The derivative term is most sensitive to the small variation in the error and so easily influenced by noise signal. Derivative gain (Kd) should be optimum so that control action will be stable and having good noise immunity.
Thus, the PID controller needs the optimum settings for small overshoot, negligible steady state error, and faster response time.
In the history of PID controller, the Ziegler and Nicholas (ZN) first time proposed optimum settings of PID controller [1]. Tuning of PID controller is the process to find out optimum value of Kp, Ki, and Kd for the small overshoot, negligible steady state error, and faster response time. ZN proposed open and closed loop tuning method of PID controller but the ZN tuning method is not suitable for the system that having large transport delay. Cohen coon gives the solution of this problem and proposed a method of PID tuning that is suitable for the system having large transport delay [2].
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459,ISO 9001:2008 Certified Journal, Volume 2, Issue 12, December 2012)
158 K. S. Tang, Kim Fung Man, Guanrong Chen and Sam Kwong [12] used fuzzy logic approach for designing of PID controller. Zhen-Yu-Zhao carried out the similar work [13].
In modern control application, genetic algorithm is used along with fuzzy PID controller. The system was designed in such a way that it will auto tune the PID controller and improves the performance. Many researchers were worked for the self-tuning of PID controller using the genetic approach [14-18]. Zwe-Lee Gaing [19] uses the swarm optimization approach for the optimum design of PID controller. Hang, C.C.; Sin, K.K were used auto tuning of PID controller based on cross-correlation method [20,21]. The huge works were carried out in the last few decades on PID controller. The PID controller uses the different algorithms like fuzzy, genetic and neural network for tuning. However, very little work carried out on the auto tuning of PID using Numerical method. The ON line auto tuning of PID controller was suggested using Successive Approximation Method (SAM) [22]. In this present work, MATLAB environment based simulations are studied for the auto tuning of PID controller using SAM.
II. MATHEMATICAL MODEL
Numerical approach is adopted to solve the certain issues in PID controller. The mathematical model of PID controller is developed using numerical method [22]. The auto tuning of PID controller is the vital problem and hence numerical technique is adopted. The important equations are
P d I
de
Y
K e
K
K edt
dt
(1)
The PID equation has many different forms. The software model of PID equation is derived and as follows.
2
P d I
e
Y K e K K e t
t
2
1 0 P d I
e
Y Y K e K K eT
T
(2) Equation 2 is the software implementation mathematical model of PID controller equation.
Proportional Constant 1 1 n n n n Y Y e e (3) Integral Constant
Similarly, the integral & derivative constant can be determined 1 1 1 1 0 0 0
1 ( 1) 0 1 ( 1)
0 0
lim
lim
n n n n n n t t nn t t n n n n
e
n n e n n
Y
Y
e dt
e dt
e dt
e dt
(4) 1 0 1 1 01
lim
lim
n n n n n e n n eYn
de
de
Y
de
de
dt
dt
dt
dt
(5)In the discrete form, the equations are represented as follows
The Proportional constant is,
1 0 P
Y
Y
K
e
(6)The Integral constant is,
1 0 I
Y
Y
K
eT
(7) The Derivative constant is,1 0 2 D
Y
Y
K
T
e
(8)Construction of appropriate numerical method
Suggested auto tuning method is implemented using numerical computational method. The central difference method is used to solve the differentiation of PID equation. The integration is solved by using Simpson’s one – third rule. The accuracy of the numerical solution varies with number of steps and hence maximum numbers of steps are selected in order to get high accuracy.
Step 3:- Implementation of method (algorithm) to obtain solution
The design of algorithm is based on the numerical method. The algorithm can be written for the auto tuning of PID controller is
1.Set initial value of PID constants 2.calculate output of PID equation 3.Calculate one by one PID constants
4.Skip step 3 if PID constants are approximately close to each other otherwise repeat step 2
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459,ISO 9001:2008 Certified Journal, Volume 2, Issue 12, December 2012)
159
Validation of solution
Validation of solution is given by comparing data (PID constant) with calculated data or data obtained by using other tuning method.
The block diagram of SAM-PID (Successive Approximation Auto Tune Type PID) controller and the software and hardware approach is discussed in [22,23] along with detail algorithm.
III. MATLABSYSTEM
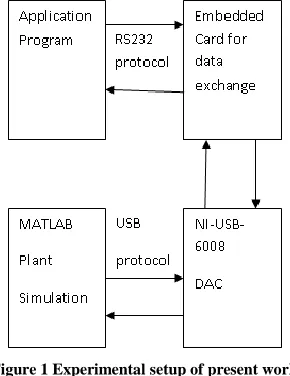
[image:3.612.326.569.167.396.2]The fig. 1 shows experimental setup of present work. The SAM-PID controller has been designed and hardware is tested in the laboratory with the MATLAB interfacing. Physical systems are implemented for simulation using MATLAB model. Plant (input, output) data exchange is possible using Data Acquisition Card (DAC) with Universal Serial Bus (USB) protocol. Plant data is used for the calculation of PID constants using SAM. The embedded card is going to collect plant data and transfers data via serial RS232 protocol to application program [24]. The application program is developed with visual studio 2005 express edition. Auto tune algorithm is implemented using visual studio 2005 express edition for calculation of the PID constants.
Figure 1 Experimental setup of present work
Third order system is implemented using MATLAB toolbox shown in Fig. 2. Real time data is acquired using analog input tool box.
[image:3.612.327.574.204.316.2]NI USB 6008 is USB data acquisition card with USB connectivity and compatible with MATLAB data acquisition tool box for data exchange. Analog output tool box is used to send System output to embedded card. Third order system is articulated in fig. 3.
Figure 2 MATLAB model of 3rd order system
Figure 3 3rd order system
[image:3.612.96.241.425.613.2]Second plant is a DC motor speed control system shown in fig. 4. The model of Current hysteresis loop is implemented to generate pulses required for switching power devices. The Power devices deliver average power to the load based on the received pulses from the current hysteresis. Voltage control method preferred for Speed control of DC motor. The complete DC motor speed control system is shown in fig. 5.
[image:3.612.330.574.513.635.2]International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459,ISO 9001:2008 Certified Journal, Volume 2, Issue 12, December 2012)
[image:4.612.53.297.141.323.2]160
Figure 5 DC motor Speed control methodology
IV. AUTO TUNE RESULTS
[image:4.612.340.558.241.370.2]Third order system consider for auto tuning at set point of 22. The auto tune algorithm results are summarized in table 1. Derivative gain (KP) is zero; this is possible due to the fact that third order system is more susceptible to the noise [25]. If derivative constant is non zero then the overall control system is more likely influenced with the noise signal. Proportional and integral constants are equal in magnitude but having apposite sign. Proportional gain is responsible for quicker control signal and integral constant is responsible for error summation. PID control output is now become subtractive due to the negative sign of integral action. This process makes the stable control action only for the range of set points. The range of set points is the minimum to maximum values of set point where, there will stable control action. It is very difficult to have a stable control action for 3rd order system. Fig. 6 and 7 shows the variation of plant output with the variance and values of PID constants respectively.
Table 1
Third order auto tune results
Third order system having damping nature and it is very difficult for smooth controlling. However, the higher order systems are compensated and it is making suitable for smooth controlling with allowable margin [26]. The margin is calculated in terms of variance based on the data collection (Database). The output response of 3rd order system is shown in fig. 6. The output is oscillating near about the set point which is undesirable. The difference between data variance and set point is 0.3333.
Figure 6 Output response of 3rd order system
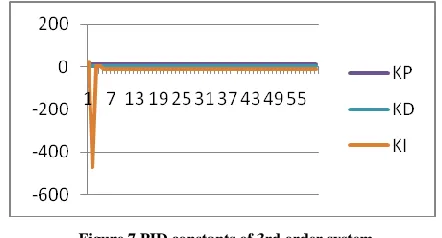
[image:4.612.331.552.477.596.2]The PID constants are iterated and the values are computed according to successive approximation algorithm. The change of PID constants per unit sample is shown in fig. 7 after each of iteration. Derivative constant converges very much faster than the proportional constant. The Integral constant having slow convergence rate as compare with other two PID constants.
Figure 7 PID constants of 3rd order system
[image:4.612.61.303.589.693.2]International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459,ISO 9001:2008 Certified Journal, Volume 2, Issue 12, December 2012)
[image:5.612.324.576.138.324.2]161
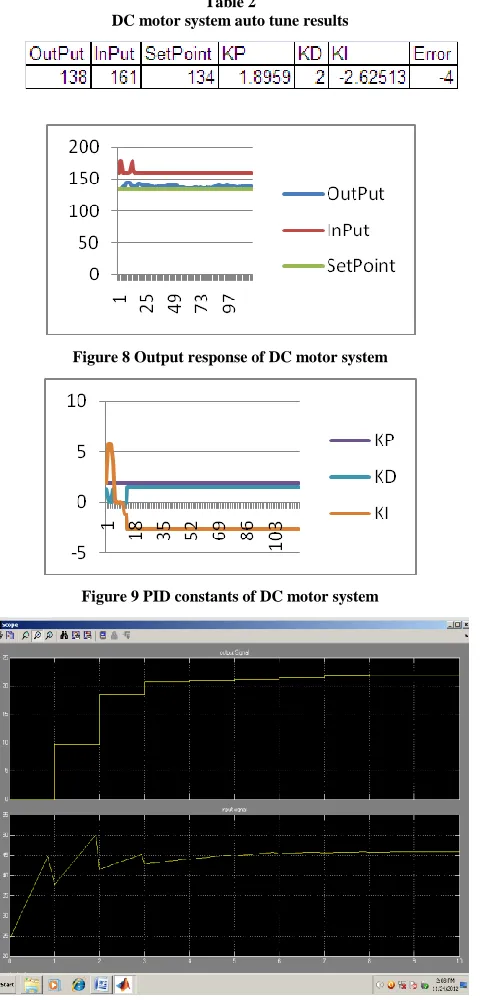
Table 2
DC motor system auto tune results
Figure 8 Output response of DC motor system
Figure 9 PID constants of DC motor system
Figure 10 Response of 3rd order system using MATLAB
Figure 11 Response of DC motor speed control using MATLAB
V. CONCLUSION
PID controller has improved response after tuned properly. Various tuning methods have been proposed and used for the tuning of PID controller. The optimum values of PID constants are desirable for smooth control action. Many researchers have been proposed various rules of tuning of PID controller. However, among the all tuning method very little attention was given to the use of numerical method in the literature. The present work is carried out in the laboratory using MATLAB toolset which describes the development of auto tuned PID controllers can be used on line or off line. The simulation results are very much satisfactory for the 3rd order system with allowable margin. Steady state error is observed in the response of developed systems that can improve using implementation of suitable noise filter in the feedback. The performance of present auto tune method is found to be satisfactory; however there is every chance to improve its speed, performance and response by using suitable hardware and software platform.
REFERENCES
[1] J.G. Ziegler and N.B. Nichols, ―Optimum settings for automatic controllers‖, Trans. ASME, 64, 1942, 759- 768.
[2] Cohen, G.H., Coon, G.A. "Theoretical consideration of retarded control", Trans. ASME vol. 75, pp.827-834, 1953
[image:5.612.53.293.139.639.2]International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459,ISO 9001:2008 Certified Journal, Volume 2, Issue 12, December 2012)
162 [4] Jong-Hwan Kim, Member, IEEE, Kwang-Choon Kim, and Edwin K.
P. Chong, Member, IEEE, ―Fuzzy Precompensated PID Controllers‖, IEEE transactionson control systems technology, vol. 2 , no. 4, december 1994 pp.406-411
[5] Wei Li, Member, IEEE, ―Design of a Hybrid Fuzzy Logic Proportional Plus Conventional Integral-Derivative Controller‖, IEEE transactions on fuzzy systems, vol. 6, no. 4, november 1998, pp. 449-463
[6] Wei Li , Xiaoguang Chang, ―Application of hybrid fuzzy logic proportional plus conventional integral-derivative controller to combustion control of stoker-red boilers‖, Fuzzy Sets and Systems,2000, pp. 267-284
[7] W. Li, X. G. Chang, Jay Farrell, and F. M. Wahl, ―Design of an Enhanced Hybrid Fuzzy P ID Controller for a Mechanical Manipulator‖, IEEE transactions on systems, man, and cybernetics— part b: cybernetics, vol. 31, no. 6, december 2001 pp- 938-945 [8] Chunhua Yanga, Min Wua, Deyao Shena, Geert Deconinck, ―Hybrid
intelligent control of gas collectors of coke ovens‖, Control Engineering Practice 9 (2001) 725– 733
[9] Un-Chul Moon, Member, IEEE, and Kwang Y. Lee, Fellow, IEEE, ―Hybrid Algorithm With Fuzzy System and Conventional PI Control for the Temperature Control of TV Glass Furnace‖, IEEE transactions on control systems technology, vol. 11, no. 4, july 2003, pp 548-554
[10] Isin Erenoglu Ibrahim Eksin Engin Yesil Mujde Guzelkaya, ―An Intelligent Hybrid Fuzzy Pid Controller‖, Proceedings 20th European Conference on Modelling and Simulation ECMS, 2006 ISBN 0-9553018-0-7 / ISBN 0-9553018-1-5
[11] Kyoung Kwan Ahn and Bao Kha Nguyen, ―Position Control of Shape Memory Alloy Actuators Using Self Tuning Fuzzy PID Controller‖, International Journal of Control, Automation, and Systems, vol. 4, no. 6, pp. 756-762, December 2006
[12] K. S. Tang, Member, IEEE, Kim Fung Man, Senior Member, IEEE, Guanrong Chen, Fellow, IEEE, and Sam Kwong, Member, IEEE, ―An Optimal Fuzzy PID Controller‖, IEEE transactions on industrial electronics, vol. 48, no. 4, august 2001, pp. 757-765
[13] Zhen-Yu-Zhao, Member, IEEE, Masayoshi Tomizuka, IEEE and Satoru Isaka, Member IEEE, ―Fuzzy Gain Scheduling of PID controller‖, IEEE transactions on system, man and cybernetics, vol 23, no 5, September/octomber 1993 pp- 1392-1398
[14] Tzuu-Hseng S. Li, Ming-Yuan Shieh, ―Design of a GA-based fuzzy PID controller for non-minimum phase systems‖, Fuzzy Sets and Systems 111 (2000) 183-197 2000 Published by Elsevier Science B.V.
[15] Dong Hwa Kim a, Ajith Abraham b, Jae Hoon Cho a, ―A hybrid genetic algorithm and bacterial foraging approach for global optimization‖, science direct, Information Sciences 177 (2007) pp. 3918–3937
[16] Jones, A.H.; De Moura Oliveira, P.B.; , "Genetic auto-tuning of PID controllers," Genetic Algorithms in Engineering Systems: Innovations and Applications, 1995. GALESIA. First International Conference on (Conf. Publ. No. 414) , vol., no., pp.141-145, 12-14 Sep 1995 doi: 10.1049/cp:19951039
[17] Wang, P.; Kwok, D.P.; , "Auto-tuning of classical PID controllers using an advanced genetic algorithm," Industrial Electronics, Control, Instrumentation, and Automation, 1992. Power Electronics and Motion Control., Proceedings of the 1992 International Conference on , vol., no., pp.1224-1229 vol.3, 9-13 Nov 1992 doi: 10.1109/IECON.1992.254429
[18] Liu Fan; Er Meng Joo; , "Design for auto-tuning PID controller based on genetic algorithms," Industrial Electronics and Applications, 2009. ICIEA 2009. 4th IEEE Conference on , vol., no., pp.1924-1928, 25-27 May 2009 doi: 10.1109/ICIEA.2009.5138538 [19] Zwe-Lee Gaing, Member, IEEE, ―A Particle Swarm Optimization
Approach for Optimum Design of PID Controller in AVR System‖, ieee transactions on energy conversion, vol. 19, no. 2, june 2004, pp. 384-391
[20] Hang, C.C.; Sin, K.K.; , "On-line Auto-tuning Of PID Controllers Based On Cross Correlation," Industrial Electronics Society, 1988. IECON '88. Proceedings., 14 Annual Conference of , vol.2, no., pp.441-446, 24-28 Oct 1988 doi: 10.1109/IECON.1988.665179 [21] Hang, C.C.; Sin, K.K.; , "On-line auto tuning of PID controllers
based on the cross correlation technique," IEEE Transactions on Industrial Electronics , vol.38, no.6, pp.428-437, Dec 1991 doi: 10.1109/41.107098
[22] Gade S S, Shendage S B, Uplane M D,―On line Auto Tuning of PID controller Using Successive Approximation Method,‖ IEEE International conference on Recent Trends in Information, Telecommunication and Computing (ITC), 2010, page no. 277-280 [23] Gade S. S., Shendage S. B. and Uplane M D,‖ Comparison of Auto
Tune PID Parametrs with other Tuning Methods‖, International Journal of Computer and Electronics Engineering (IJCEE), Volume 4 Number 1, January-June 2012, ISSN : 0975-4202; pp. 25-35 [24] Gade S S, Kanase A B, Shendage S B, Uplane M D,―Serial
Communication Protocol for Embedded Application‖, published in International Journal of IT and Knowledge Management, july- December 2010, Vol-III, No – 2,pp. 461-463, ISSN: 0973-4414 [25] Gade S S, Uplane M D, Kadam D B, Phakade S V,―FPGA based
PID controller implementation‖, ICVCOM 2009,International Conference at SAINTGITS college of engineering, Kottayam (Kerala) 2009