i
VOICE RECOGNITION MOTOR CONTROL SYSTEM
NURKHALIFA BINTI MOHD NOOR
This report is submitted in partial fulfillment of the requirements for the award of Bachelor of Electronic Engineering (Industrial Electronics) With Honours
Faculty of Electronic and Computer Engineering Universiti Teknikal Malaysia Melaka
ii
UNIVERSTI TEKNIKAL MALAYSIA MELAKA
FAKULTI KEJURUTERAAN ELEKTRONIK DAN KEJURUTERAAN KOMPUTER
BORANG PENGESAHAN STATUS LAPORAN PROJEK SARJANA MUDA II
Tajuk Projek : VOICE RECOGNITION MOTOR CONTROL SYSTEM
Sesi
Pengajian : 2008/2009
Saya NURKHALIFA BINTI MOHD NOOR
mengaku membenarkan Laporan Projek Sarjana Muda ini disimpan di Perpustakaan dengan syarat-syarat kegunaan seperti berikut:
1. Laporan adalah hakmilik Universiti Teknikal Malaysia Melaka.
2. Perpustakaan dibenarkan membuat salinan untuk tujuan pengajian sahaja.
3. Perpustakaan dibenarkan membuat salinan laporan ini sebagai bahan pertukaran antara institusi
pengajian tinggi.
4. Sila tandakan ( √ ) :
SULIT*
(Mengandungi maklumat yang berdarjah keselamatan atau kepentingan Malaysia seperti yang termaktub di dalam AKTA RAHSIA RASMI 1972)
TERHAD* (Mengandungi maklumat terhad yang telah ditentukan oleh
organisasi/badan di mana penyelidikan dijalankan)
TIDAK TERHAD
Disahkan oleh:
__________________________ ___________________________________
(TANDATANGAN PENULIS) (COP DAN TANDATANGAN PENYELIA)
Alamat Tetap: 19A KAMPUNG SENTOSA 09400 PADANG SERAI KEDAH
iii
“I hereby declare that this report is the result of my own work except for quotes as cited in the references.”
Signature : ……….
Author : ……….
iv
“I hereby declare that I read this report and in my opinion this report is sufficient in terms of the scope and quality for the award of Bachelor of Electronic Engineering
(Industrial Electronics) With Honours.”
Signature : ……….
Supervisor’s Name : ……….
v
vi
ACKNOWLEDGEMENT
First and foremost, I wish to express my sincere appreciation to my main thesis supervisor, En. Mazran B Esro for the guidance and support he has given me in this long, arduous process. He always made time to sit down and talk with me at every step of the way. Without his continued support and interest, this thesis would not have been the same as presented here.
I would also like to express my greatest gratitude to my sister and brother who had sacrificed much of their time in helping me.
vii
ABSTRACT
viii
ABSTRAK
ix
CONTENTS
CHAPTER TITLE PAGE
PROJECT TITLE i
STATUS REPORT DECLARATION FORM ii
DECLARATION iii DECLARATION SUPERVISOR iv
DEDICATION v ACKNOWLEDGEMENT vi
ABSTRACT vii
ABSTRAK viii
CONTENTS ix
LIST OF TABLE xii
LIST OF FIGURE xiii
LIST OF APPENDIX xv
1 INTRODUCTION OF PROJECT 1.1 Introduction 1
1.2 Objectives 2
1.3 Problem statement 3
1.4 Scope 4
x
1.6 Report Structure 6
2 LITERATURE REVIEW
2.1 Wheelchair Controlled using a Tongue 7 2.2 Wheelchair Controlled using Automatic
Vehicle Guided (AVG) 8
2.3 Smart Wheelchair Component System (SWCS) 8 2.4 Navchair assistive Wheelchair Navigation System 9 2.5 Designed a DC Motor Speed Controller by using
PIC Microcontroller 9
3 METHODOLOGY
3.1 Introduction 10
3.2 Initial Phase and Analysis 11
3.3 Equipment Needed 11
3.4 System Block Diagram 12
3.5 Hardware and Software Development Process 13
3.6 Hardware 14
3.6.1 Voltage Regulator 14
3.6.2 Power Supply/Battery Block 15
3.6.3 L293D Motor Driver 15
3.6.4 Voice Recognition Module SR-06 18 3.6.4.1 Testing the Voice Recognition 19
3.7 Component of Project 22
3.7.1 Capacitor 23
3.7.2 Resistor 24
3.7.3 Crystal Oscillator 25
3.7.4 PIC16F84A Microcontroller 25
xi
3.7.6 IC 4011 29
3.8 Software 31
3.8.1 Flowchart 31
3.8.2 Proteus 7 Professional 32
3.8.3 PIC C Compiler 33
3.8.3.1 Program the Motor Driver
L293D into PIC Microcontroller 34
3.8.4 Design the PCB 35
3.8.4.1 3D Visualization 36
4 RESULT AND DISCUSSION
4.1 Introduction 38
4.2 Simulation Result 38
4.3 System Recognition Performance Evaluation 41
4.4 Motor Movement Analysis 48
4.5 Discussion 55
5 CONCLUSION AND RECOMMENDATION
5.1 Conclusion 60
5.2 Recommendations 61
xii
LIST OF TABLE
NO TITLE PAGE
3.1 Project planning and objectives 11
3.2 LM78L05 15
3.3 Parametric Table 28
3.4 Motor Sequence 34
4.1 Recognition result data taken in the quiet area 41
4.2 Recognition accuracy for quiet area 43
4.3 Recognition result data taken in the noisy area 44
4.4 Recognition accuracy for noisy area 46
xiii
LIST OF FIGURE
NO TITLE PAGE
1.1 Project Methodology 5
3.1 Voice recognition control system block diagram 12 3.2 Hardware and Software task for the system 13
3.3 Voltage regulator circuit 14
3.4 Pin connections (Top view) 16
3.5 Block diagram of motor driver for L293D 17
3.6 Voice recognition module (SR-06) 18
3.7 Flowchart for the word recognition training mode 20 3.8 Flowchart for the word recognition testing mode 21
3.9 Voice recognition hardware 22
3.10 Capacitor materials 23
3.11 Resistor 24
3.12 Crystal Oscillator 25
3.13 PIC16F84A Model 26
3.14 Pin diagram 27
3.15 Dual-in-line 28
3.16 Programming Flowchart 31
3.17 Schematic diagram 32
3.18 Programming in PIC16F84A 33
3.19 Concept of motor 34
xiv
3.21 PCB design for motor driver 36
3.22 PCB board complete with component arrangement
Picture by 3D view for PIC circuit 37
3.23 PCB board picture by 3D view for PIC circuit 37
4.1 Schematic diagram 39
4.2 Programming 40
4.3 Recognition performance in quiet area 44
4.4 Recognition performance in noisy area 46
4.5 Wheelchair movement method 48
4.6 Wheelchair driving method (top view) 49
4.7 Project model (front view) 50
4.8 Project model (rear view) 51
4.9 Motor at wheelchair 52
4.10 Wheelchair driving belt 52
4.11 Left side motor 53
4.12 Right side motor 54
4.13 Performance analysis in quiet area 56
4.14 Performance analysis in noisy area 57
4.15 Wire connection 58
xv
LIST OF APPENDIX
NO TITLE PAGE
A PIC16F84A Datasheet 63
B LM741 Datasheet 69
C L293D Datasheet 76
1
CHAPTER 1
INTRODUCTION OF PROJECT
1.1 Introduction
2
1.2 Objectives
The objectives of this project:
• To combine PIC Programming (software) with DC motor (hardware). The type of PIC used in this circuit is PIC16F84A. This microcontroller has 18 pin, two input /output port that is port A and port B, oscillator and 68bytes memory.
• To convert receiving voice input signal into data which control the dc motor movements by using PIC programming.
• To control the DC motor movements by using voice command using voice recognition kit SR-06. This circuit will operate in the stand-alone manual mode. The voice recognition circuit doesn’t require a host computer and may be integrated into other devices to add voice control.
• To simplify the operations of the motorized wheelchair as to make it easier and simpler for the disabled person to operate. With this simplified operation, many disabled people have a chance to use the system with out too much effort.
3
1.3 Problem Statement
4
1.4 Scope
The first scope for this project is to control the motor movement using the voice command. This system is capable of receiving voice input signal and converting it into data which control the dc motor movements such as the directions of the rotations.
The basic voice activated functions of the wheelchair control system includes forward and backward directions movements, left and right turns, wheelchair stop function, as well as collision avoidance function. The functions and the corresponding digital command words are pre-stored in the voice recognition memory locations.
This project used PIC microcontroller to program the voice command. PIC is an apparatus that can be reprogrammed if the mistake is happen or to improve the system.
5
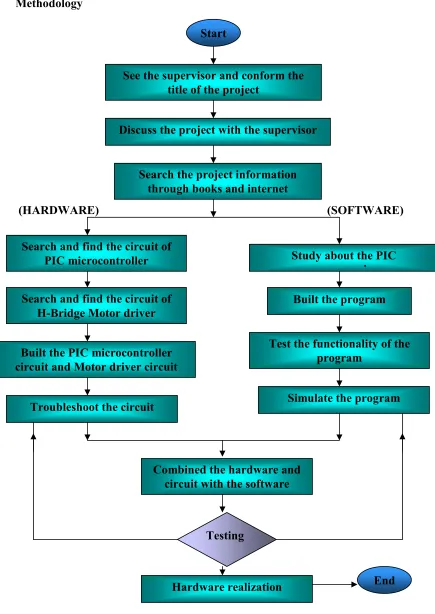
1.5 Methodology
(HARDWARE) (SOFTWARE)
[image:20.612.134.569.75.689.2]
Figure 1.1: Project Methodology
Start
See the supervisor and conform the title of the project
Testing
Discuss the project with the supervisor
Search the project information through books and internet
Search and find the circuit of PIC microcontroller
Search and find the circuit of H-Bridge Motor driver
Built the PIC microcontroller circuit and Motor driver circuit
Troubleshoot the circuit
Study about the PIC programming
Built the program
Test the functionality of the program
Simulate the program
Combined the hardware and circuit with the software
6
1.6 Report Structure
The first chapter of this report is about the introduction of the report. It includes explanation about objectives, problem statement, scope and the methodology of the project.
The second chapter is about literature review of the project. This project discusses the concept of the research and how it related with the theory.
Chapter three is explained the methodology and process that taken to complete the project. It consist the detail development of this project.
Chapter four is about the result that we obtained based on the methodology. The result will be analyzed and compared to the objectives and problem statement.
7
CHAPTER II
LITERATURE REVIEW
This chapter is discusses about previous research in wheelchair development related on the project. There are five projects which included wheelchair controlled using a tongue, wheelchair controlled using Automatic Vehicle Guided (AVG), Smart Wheelchair Component System (SWCS), navChair Assistive Wheelchair Navigation System and designed a DC Motor Speed Controller by using PIC Microcontroller.
2.1 Wheelchair controlled using a tongue
8
2.2 Wheelchair using Automatic Vehicle Guided (AVG)
Mohamed Fezari et. al. [11] used and implemented a direct voice command wheelchair control system in their design for disabled person. They used a speech recognition kit which previously had been implemented in the control of Automatic Vehicle Guided (AVG) and they used a voice recognition kit ‘Voice Direct 364’ (VD364) manufactured by Sensory Incorporated, USA. In their design microphone is directly connected by using wires to the input of the voice processor module.
2.3 Smart Wheelchair Component System (SWCS)
9
2.4 NavChair Assistive Wheelchair Navigation System
They also developed a NavChair Assistive Wheelchair Navigation System to reduce the cognitive and physical requirements of operating a powered wheelchair. It is developed to provide mobility to those individuals who would otherwise find it difficult or impossible to use a power wheelchair due to cognitive. It is an adaptive shared control system, in which divided between the wheelchair and the wheelchair operator and adaptive in how control is divided between the wheelchair and the wheelchair operator varies based on current task requirements. They used voice control to steer the NavChair through a navigation task requiring several transitions between operating modes. It could reduce the motor and cognitive effort of operating a power wheelchair by sharing vehicle control decisions regarding obstacle avoidance, safe object approach, maintenance of a straight path, and much more. The system consists of (1) IBM-compatible 33MHz 80486-based computer, (2) array of 12 sonar sensors mounted on the front of a standard wheelchair lap tray, and (3) interface module which provide the necessary interface circuits for the system.
2.5 DC Motor Speed Controller by using PIC Microcontroller
Hazli Rafis Bin Abdul Rahim designed a DC motor speed controller to control the rotational speed of the motor which is varied when the load is changed. The rotational speed of the motor will not change even when the load is changed. By using the PIC, a computer program is developed to control the motor’s speed. Based on the project analysis, rotational speed of the motor can be controlled by using pulse width modulation (PWM) through duty cycle of the wave.