Rochester Institute of Technology
RIT Scholar Works
Theses Thesis/Dissertation Collections
11-2016
Anomaly Detection Using Predictive
Convolutional Long Short-Term Memory Units
Jefferson Ryan MedelFollow this and additional works at:http://scholarworks.rit.edu/theses
This Thesis is brought to you for free and open access by the Thesis/Dissertation Collections at RIT Scholar Works. It has been accepted for inclusion in Theses by an authorized administrator of RIT Scholar Works. For more information, please [email protected].
Recommended Citation
Anomaly Detection Using Predictive Convolutional Long
Short-Term Memory Units
by
Jefferson Ryan Medel
A Thesis Submitted in Partial Fulfillment of the Requirements for the Degree of Master of Science in Computer Engineering
Supervised by
Dr. Andreas Savakis
Department of Computer Engineering Kate Gleason College of Engineering
Rochester Institute of Technology Rochester, NY
November 2016
Approved By:
_______________________________________________________________________________
Dr. Andreas Savakis
Primary Advisor – R.I.T. Dept. of Computer Engineering
_______________________________________________________________________________
Dr. Andres Kwasinski
Secondary Advisor – R.I.T. Dept. of Computer Engineering
_______________________________________________________________________________
Dr. Roy Melton
Dedication
I would like to dedicate this thesis to my loving parents, Ric and Juliet Medel, and sister,
Acknowledgements
I would like to thank my advisor Dr. Andreas Savakis for his assistance and work guiding
me through the development of this thesis, and my committee members Dr. Andres
Kwasinski and Dr. Roy Melton for their time. I also want to thank my colleagues in the
Computer Vision Lab, Peter Muller, Dan Chianucci, and Breton Minnehan, for their
Abstract
Automating the segmentation of anomalous activities within long video sequences
is complicated by the ambiguity of how such events are defined. This thesis approaches
the problem by learning generative models with which meaningful sequences can be
identified in videos using limited supervision. We propose two types of end-to-end
trainable Convolutional Long Short-Term Memory (Conv-LSTM) networks that are able
to predict the subsequent video sequence from a given input. The first is an
encoder-decoder based model that learns spatio-temporal features from stacked non-overlapping
image patches, and the second is an autoencoder based model that utilizes max-pooling
layers to learn an abstraction of the entire image. The networks learn to model “normal”
activities from usual events. Regularity scores are derived from the reconstruction errors
of a set of predictions with abnormal video sequences yielding lower regularity scores, as
they diverge further from the actual sequence with time. The models utilize a composite
structure and examine the effects of “conditioning” to learn more meaningful
representations. The best model is chosen based on the reconstruction and prediction
accuracies. The Conv-LSTM models are evaluated both qualitatively and quantitatively,
demonstrating competitive results on multiple anomaly detection datasets. Conv-LSTM
units are shown to provide competitive results for modeling and predicting learned events
Table of Contents
Dedication ... ii
Acknowledgements ... iii
Abstract ... iv
List of Figures ... vii
List of Tables ... xii
Glossary ... xiii
Chapter 1 Introduction ...1
1.1. Thesis Contributions ... 2
1.2. Thesis Outline ... 2
Chapter 2 Background ...4
2.1. Feed Forward Neural Networks ... 4
2.2. Convolutional Neural Networks ... 5
2.3. Recurrent Neural Networks ... 7
2.3.1 Long Short-Term Memory ... 8
2.3.2 Convolutional Long Short-term Memory ... 10
2.4. Future Video Prediction... 13
2.5. Anomaly Detection in Videos ... 17
Chapter 3 Anomaly Detection through Future Prediction ...19
3.1. Proposed Architectures ... 19
3.1.2 Proposed Conv-LSTM Autoencoder ... 22
3.1.3 Parameters of Note ... 24
3.2. Evaluation Algorithm ... 26
3.2.1 Parameters of Note ... 28
Chapter 4 Experimental Results ...30
4.1. Experimental Setup... 30
4.1.1 Dataset Selection ... 31
4.2. Preliminary Code Validation ... 34
4.3. Parameter Selection ... 36
4.3.1 Model Parameters ... 36
4.3.2 Evaluation Parameters ... 38
4.4. Results ... 39
4.4.1 Predicting Past and Future Video Sequences ... 39
4.4.2 Preliminary Anomaly Detection Evaluation ... 46
4.4.3 Improved Anomaly Detection Evaluation... 46
Chapter 5 Conclusion ...66
List of Figures
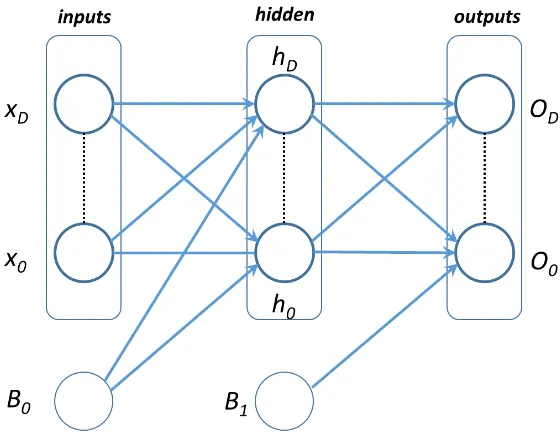
Figure 1: A Simple Feed Forward Neural Network. The nodes in the input layer is the input data, while the nodes in the hidden and output layers are perceptrons. Each
connection between nodes represents a weighted connection. ...4
Figure 2: Diagram illustrating the relationship between the input and layers. Each resulting feature map in the hidden layer uses its own convolutional filter. The filters process the input with a sliding window that sums the convolutional results across every channel at the same coordinate. ...6
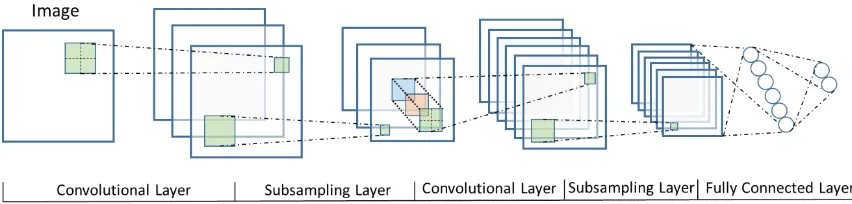
Figure 3: A visualization of the LeNet architecture. It combined convolutional, pooling, and fully connected layers to learn a model that can solve classification problems...7
Figure 4: Unrolled Recurrent Unit ...8
Figure 5: Long Short-term Memory Cell ...9
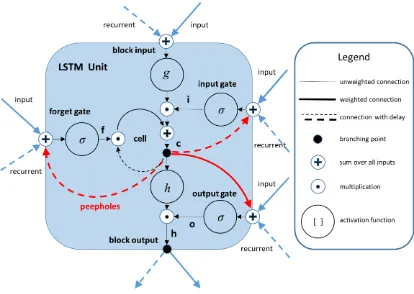
Figure 6: Inner Structure of a Conv-LSTM Unit ...12
Figure 7: The composite structure for unrolled LSTM unit. Blue lines represent potential conditioning ...14
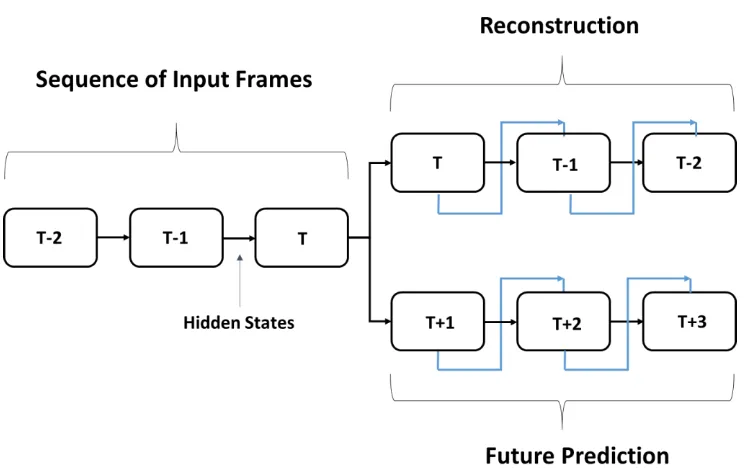
Figure 8: Reconstruction and future prediction obtained from the Composite Model on a dataset of Bouncing MNIST images [19] ...15
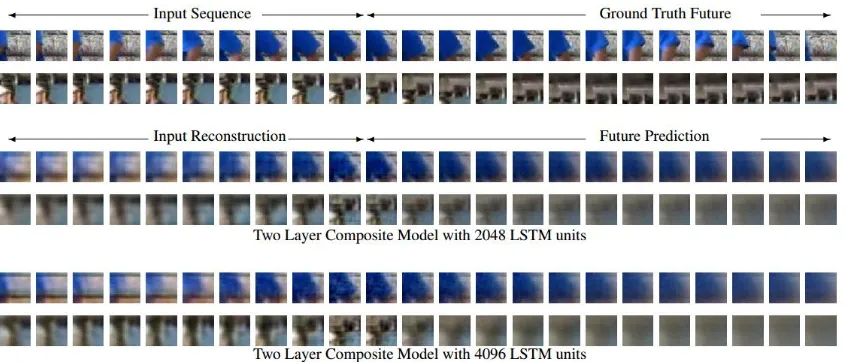
Figure 9: Reconstruction and future prediction obtained from the Composite Model on a dataset of natural image patches. [19] ...16
Figure 10: Two prediction examples. All of the predictions and ground truths are sampled with an interval of 3. From top to bottom: input frames; ground truth frames; prediction by the ConvLSTM forecasting network. [17]...17
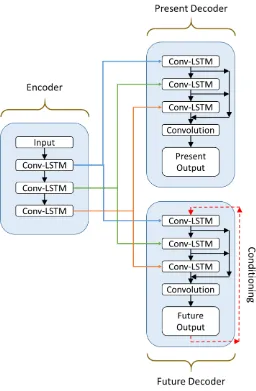
Figure 11: High-level view of the Conditioned Composite Conv-LSTM Encoder-Decoder. The right side is the encoder, while the left is the decoder. The decoder is split into a present and future decoder, where the future decoder is potentially conditioned with the output of the current time-step feeding into the input of the next. ...20
input of the next. The full composite model has a duplicate of the decoder with the target output being the input frames. ...23
Figure 13: Three samples of the first ten frames from three sequences of the Bouncing MNIST dataset ...31
Figure 14: Images from the UCSD Pedestrian dataset. The left and right columns are from the Pedestrian 1 and 2 subsets respectively...32
Figure 15: Images from the Subway dataset. The left and right columns are from the Exit and Entrance videos respectively. ...32
Figure 16: Images from the Avenue Dataset. ...33
Figure 17: A comparison between prototype network outputs. Each column denotes a time-step sequentially from left to right starting at T+1. Each row from top to bottom represent the input sequence, the target ground truth future sequence, the forecasting model [17], the encoder-decoder prototype, and the autoencoder prototype. ...35
Figure 18: Input reconstruction obtained from the Composite Conv-LSTM Autoencoder Model on a non-anomalous sequence from test clip 1 of the UCSD Pedestrian 1 dataset. The first row is the input ground truth video sequences, while the second is the input reconstruction. Each column denotes a time-step. Regions of interest that change through time are highlighted by a yellow bounding box. ...40
Figure 19: Future prediction obtained from the Composite Conv-LSTM Autoencoder Model on the non-anomalous sequence from test clip 1 of the UCSD Pedestrian 1 dataset used in Figure 18. The first row is the future ground truth video sequences, while the second is the output prediction. Each column denotes a time-step. Regions of interest that change through time are highlighted by a yellow bounding box. ...41
Figure 20: Input reconstruction obtained from the Composite Conv-LSTM Encoder-Decoder Model on a non-anomalous sequence from test clip 1 of the UCSD Pedestrian 1 dataset. The first row is the input ground truth video sequences, while the second is the input reconstruction. Each column denotes a time-step. Regions of interest that change through time are highlighted by a yellow bounding box. ...41
time-step. Regions of interest that change through time are highlighted by a yellow bounding box. ...42
Figure 22: Input reconstruction obtained from the Composite Conv-LSTM Encoder-Decoder Model on an anomalous sequence from test clip 1 of the UCSD Pedestrian 1 dataset. The first row is the input ground truth video sequences, while the second is the input reconstruction. Each column denotes a time-step. Regions of interest that change through time are highlighted by a yellow bounding box. ...43
Figure 23: Future prediction obtained from the Composite Conv-LSTM Encoder-Decoder Model on the anomalous sequence from test clip 1 of the UCSD Pedestrian 1 dataset used in Figure 22. The first row is the future ground truth video sequences, while the second is the output prediction. Each column denotes a time-step. Regions of interest that change through time are highlighted by a yellow bounding box. ...43
Figure 24: Input reconstruction obtained from the Composite Conv-LSTM Encoder-Decoder Model on an anomalous sequence from test clip 29 of the UCSD Pedestrian 1 dataset. The first row is the input ground truth video sequences, while the second is the input reconstruction. Each column denotes a time-step. Regions of interest that change through time are highlighted by a yellow bounding box. ...45
Figure 25: Future prediction obtained from the Composite Conv-LSTM Encoder-Decoder Model on the anomalous sequence from test clip 29 of the UCSD Pedestrian 1 dataset used in Figure 24. The first row is the future ground truth video sequences, while the second is the output prediction. Each column denotes a time-step. Regions of interest that change through time are highlighted by a yellow bounding box ...45
Figure 26: A comparison between the original and improved model’s regularity scores for testing clip 36 of the UCSD Pedestrian 1 dataset...50
Figure 27: Regularity score (Eq.7) of test clip 29 of the UCSD Pedestrian 1 dataset. Distinct local minima are represented by a blue dot, distinct local maxima are represented by a red dot, the anomalous ground truth regions are highlighted in red, and the proposed anomalous regions are highlighted in green. ...50
Figure 28: Anomaly evaluation graphs of test clips from the UCSD Pedestrian 1 dataset. Smaller areas of interest are highlighted with a yellow bounding box. ...51
Figure 29: Regularity score (Eq.7) of test clip #2 of the UCSD Pedestrian 2 dataset ...53
Figure 31: Input reconstruction obtained from the (224x224) Composite Conv-LSTM Encoder-Decoder Model on an anomalous sequence from test clip 1 of the UCSD Pedestrian 2 dataset. The first row is the input ground truth video sequences, while the second is the input reconstruction. Each column denotes a time-step. Regions of interest that change through time are highlighted by a yellow bounding box. ...55
Figure 32: Future prediction obtained from the (224x224) Composite Conv-LSTM Encoder-Decoder Model on the anomalous sequence from test clip 1 of the UCSD Pedestrian 2 dataset used in Figure 32. The first row is the future ground truth video sequences, while the second is the output prediction. Each column denotes a time-step. Regions of interest that change through time are highlighted by a yellow bounding box ...55
Figure 33: Regularity score (Eq.7) of frames 40,000–60,000 of the subway entrance. Distinct local minima are represented by a blue dot, distinct local maxima are represented by a red dot, the anomalous ground truth regions are highlighted in red, and the proposed anomalous regions are highlighted in green. ...57
Figure 34: Regularity score (Eq.7) of frames 100,000-120,000 (top) and 120,000 – 144,000 (bottom) from the Subway Entrance video. ...57
Figure 35: Input reconstruction obtained from the (224x224) Composite Conv-LSTM Encoder-Decoder Model on an anomalous sequence from the Subway Entrance video. The first row is the input ground truth video sequences, while the second is the input reconstruction. Each column denotes a time-step. ...58
Figure 36: Future prediction obtained from the (224x224) Composite Conv-LSTM Encoder-Decoder Model on the anomalous sequence from the Subway Entrance video used in Figure 35. The first row is the future ground truth video sequences, while the second is the output prediction. Each column denotes a time-step. ...58
Figure 37: Regularity score (Eq.7) of frames 37,500–52,500 of the subway exit video. ..60
Figure 38: Regularity score (Eq.7) of frames 7,500-22,500 (top) and 22,500 – 37,500 (bottom) from the Subway Entrance video. ...60
Figure 40: Future prediction obtained from the (224x224) Composite Conv-LSTM Encoder-Decoder Model on the anomalous sequence from the Subway Exit video used in Figure 39. The first row is the future ground truth video sequences, while the second is the output prediction. Each column denotes a time-step. Regions of interest that change through time are highlighted by a yellow bounding box. ...61
Figure 41: Input reconstruction obtained from the (224x224) Composite Conv-LSTM Encoder-Decoder Model on an anomalous sequence from test clip 1 of the Avenue dataset. The first row is the input ground truth video sequences, while the second is the input reconstruction. Each column denotes a time-step. ...63
Figure 42: Future prediction obtained from the (224x224) Composite Conv-LSTM Encoder-Decoder Model on the anomalous sequence from the Avenue test clip used in Figure 41. The first row is the future ground truth video sequences, while the second is the output prediction. Each column denotes a time-step...63
Figure 43: Anomaly evaluation graphs of test sequences from the Avenue dataset. ...64
List of Tables
Table 1: A comparison of Loss between the prototype networks trained on the Bouncing MNIST dataset. ...35
Table 2: Comparing reconstruction accuracy performance ...37
Table 3: Comparing reconstruction accuracy performance ...40
Table 4: Comparing anomaly detection performance of the proposed models on UCSD Pedestrian 1 dataset. There are a total of 40 anomalous events. ...47
Table 5: Average MSE per frame when evaluated on 64x64 pixel images using the specified parameters...48
Table 6: Comparing abnormal event detection performance across multiple datasets.
Ours is the Composite Conv-LSTM Encoder-Decoder (64x64) model. * Improved
Glossary
LSTM Long Short-Term Memory
Conv-LSTM Convolutional Long Short-Term Memory
FC-LSTM Fully Connected Long Short-Term Memory
CNN Convolutional Neural Network
RNN Recurrent Neural Network
MSE Mean Squared Error
FC-LSTM Fully Connected Long Short-Term Memory
ReLU Rectified Linear Unit
TP True Positive
Chapter 1
Introduction
Anomalies in videos are broadly defined as events that are unusual and signify
irregular behavior. Detecting such irregularities is important, as errors and bugs must first
be found before they can be addressed. Consequently, anomaly detection is an extensive
field that can be applied in many different areas. One such area is in computer vision
detecting irregular activities of interest in videos and can be applied to many real-world
scenarios including surveillance and security.
Meaningful events that are of interest in long video sequences, such as surveillance
footage, often have an extremely low probability of occurring. As such, manually detecting
such events, or anomalies, is a very meticulous job that often requires more manpower than
is generally available. This has prompted the need for automated detection and
segmentation of sequences of interest [1]-[15].
In contrast to the related field of action recognition where events of interest that are
clearly defined, anomalies in videos are often vaguely defined and may cover a wide range
of activities. Since it is less clear-cut, models that can be trained using little to no
supervision, including spatio-temporal features, dictionary learning and autoencoders [15]
are more applicable to the problem of evaluating anomalies. The methodologies used by
[1]-[15] were developed to detect anomalies within video sequences specifically and are
effective in doing so. A description of these methodologies and their limitations are
1.1. Thesis Contributions
This thesis aims to make two main contributions. The first is the development of a
model architecture able to encode an input video sequence, reconstruct it, and predict the
subsequent sequence. Two such networks are proposed, an encoder-decoder and an
autoencoder based model. The model utilizes Convolutional Long Short-Term Memory
(Conv-LSTM) units that allow the neural network to better learn spatio-temporal features.
Conv-LSTM units merge convolutional operations into traditional fully connected LSTM
(FC-LSTM) units, and are further discussed in Section 2.3.2. The second is the ability to
detect anomalous video segments through the model’s output using a regularity evaluation
algorithm. The regularity of a video sequence is relative to other sequences of the same
source. A preliminary investigation on the validity of the network architectures using
simplified versions are evaluated on the Bouncing MNIST dataset. The proposed networks
are then evaluated on the UCSD Pedestrian 1 dataset. The best model is improved upon
and further evaluated on the UCSD Pedestrian 2 dataset, Subway dataset, and Avenue
dataset.
1.2. Thesis Outline
This document is organized as follows: Chapter 2 discusses the prior work relative
to the thesis domain and its influence on the proposed design. Chapter 3 discusses the
proposed architectures, their various implementations, and the evaluation algorithm. The
proposed architectures include a Conv-LSTM Autoencoder and a Conv-LSTM
results on various datasets. Chapter 5 provides a conclusion summarizing the potential and
Chapter 2
Background
2.1. Feed Forward Neural Networks
The Artificial Neural Network was first proposed by Rosenblatt in 1958 [32]. Neural
networks are a biologically inspired model simulating the way a brain works. It connects
multiple “neurons,” such that each individual neuron performs simple functions that
include a nonlinearity, to model more complex tasks. A typical feed forward neural
network consists of an input layer, output layer, and one or more hidden layers (Figure 1).
The hidden and output layers are made up of perceptrons that weight their input
connections and only activate when the values used within the unit’s function exceed a
given threshold value. Every perceptron’s weights are updated through a backpropagation
[image:18.612.164.444.435.652.2]algorithm that aims to minimize the error between network output and target value.
Since the network learns its own weights, it is able to determine on its own what
features are important and applicable to the task. While a strong tool, feed forward neural
networks utilizing only perceptrons are not as effective on problems that rely on spatial or
temporal information. This weakness has led to the development of Convolutional and
Recurrent Neural Networks [39].
2.2. Convolutional Neural Networks
Images and videos of similar articles are subject to inconsistency in properties that
include translation, rotation and scaling. As such, invariance to transformations is a
desirable property in any neural network dealing with vision. Invariance can generally be
introduced into models in three ways: pre-processing the data to be invariant so any
subsequent manipulation of the data will remain invariant, use regularization techniques
like tangent propagation to penalize transformed data, and building the invariance
properties into the network’s structure [21]. The Convolutional Neural Network (CNN)
initially proposed by LeCun [22], uses the third approach.
Convolutional Neural Networks (Figure 2) utilize three mechanisms: local
receptive fields, weight sharing, and subsampling. The local receptive fields are organized
into a plane called a feature map, with every field sharing the same weight. Each field
captures local patterns within an image by connecting each neuron only to small regions of
the input. This takes advantage of the fact that pixels that are close to one another are more
strongly correlated than pixels that are far apart. Since the local receptive fields share the
of the weight kernel with the sampled region of image pixel intensities. The neurons
making up a plane are known as the convolutional layer. Sliding the local receptive field
across the entire image allows features to be found regardless of position.
As the weights of a local receptive field are the same for each neuron in the
convolutional layer, it can be seen that the convolutional layer is just an image convolution
of the previous layer. The weights are therefore specified by the convolutional filter, and
are learned alongside a bias. When the input is made up of multiple channels, the neuron
becomes the summation of convolutional operations across all channels within the same
region.
Figure 2: Diagram illustrating the relationship between the input and layers. Each resulting feature map in the hidden layer uses its own convolutional filter. The filters process the input with a sliding window that sums the convolutional results across every channel at the same coordinate.
The output of the convolutional layer feeds into a sub-sampling layer that computes
a function of sub-regions of the input. The function is generally an average or maximum,
through a sample-based discretization process [20]. This helps prevent overfitting from
highly detailed representations of the topic and reduces the complexity of the problem. The
output also becomes invariant to small changes in rotation and translation [21]. Its smaller
size also decreases the complexity of the problem. This layer is generally followed by a
fully connected layer when performing classification problems. Convolutional neural
networks are not limited to two-dimensions. Networks for multi-dimensional data are
possible as long as the filter sizes are adjusted accordingly. It should be noted that a fully
connected layer can be thought of as a special case of a convolutional layer, where the filter
[image:21.612.89.515.362.464.2]size is equal to the input size, and only a single convolution is performed.
Figure 3: A visualization of the LeNet architecture. It combined convolutional, pooling, and fully connected layers to learn a model that can solve classification problems.
2.3. Recurrent Neural Networks
Neural networks generally work under the assumption that the inputs are
independent from one another. This limits their effectiveness when applied to tasks that
may require the use of sequential information. A variety of Recurrent Neural Networks
(RNN) have been proposed, [21], [24], and [25], all of which create an internal network
evaluation of activation of current neurons, thereby allowing past data to influence current
outputs (Figure 4). This means that recurrent neural networks can learn temporal patterns
in data sequences. They have been applied to problems such as text generation where the
network learns to predict the next character or word based on the input text sequence [38].
Unfortunately, RNNs are limited in the range of context they retain and suffer from the
vanishing gradient problem, making it difficult to perform tasks with more than ten time
steps between the target and relevant inputs.
Figure 4: Unrolled Recurrent Unit
2.3.1 Long Short-Term Memory
The long short-term memory (LSTM) architecture seeks to overcome the
limitations of the typical RNN by adding the ability to selectively remember and forget
previous data. First proposed by [15], it has since been used in applications dealing with
sequences that require a way to discriminatively select what should be remembered. The
long short-term memory cell, as seen in Figure 5, utilizes three gates that control the
information received, retained, and output by the cell to find and exploit long-term
Figure 5: Long Short-term Memory Cell
There are three unique activation functions, the input, output, and gate activation
functions. The former two usually use a tanh activation function, while the latter, denoted
in the Figure 5 as “σ”, is always a sigmoid activation function. The gate activations are
calculated using a logistic sigmoid function of the dot product of the input and weights,
with each gate containing its own weights. The weights are shared by the unit through each
time step. The cell and hidden states are controlled by a input and output gates. The input
gate controls whether or not the input is considered, the forget gate controls whether or not
the previous cell data is considered, and the output gate controls if the current cell
information is released to the next state. The formulation of the LSTM cell can be
summarized as shown in (1) through (5). The inputs, outputs, and weights all represent a
Element-wise multiplication operations are denoted by “∘”. The input, forget, cell, output, and
hidden states for each timestep are denoted by i, f, c, o, and h, respectively, σ represents the
activation functions, and the connections between the input and each state in the LSTM
unit are denoted by a set of weights, W. The output state controls the information that is
propagated from the previous timestep, while the hidden state is the actual output of the
LSTM unit. The peephole connections allow the LSTM unit to access and propagate
information recorded from the preceding timestep. An LSTM encoder-decoder model was
used by [19] to reconstruct and predict video sequences. While It performed reasonably
well on Bouncing MNIST video sequences, it was less effective on patches of natural
images taken from the UCF-101 dataset [28]. The reconstructed images were fuzzy while
the predictions were little more than colored blobs. This is likely due to the fact that spatial
information within the data is lost while it propagates temporally though the unit. However,
[28] does use the weights from the encoder trained on the UCF-101 dataset to initialize an
LSTM classifier that performed well on in.
𝑖𝑡 = 𝜎(𝑊𝑥𝑖𝑥𝑡+ 𝑊ℎ𝑖ℎ𝑡−1+ 𝑊𝑐𝑖∘ 𝑐𝑡−1+ 𝑏𝑖) (1)
𝑓𝑡 = 𝜎(𝑊𝑥𝑓𝑥𝑡+ 𝑊ℎ𝑓ℎ𝑡−1+ 𝑊𝑐𝑓∘ 𝑐𝑡−1+ 𝑏𝑓) (2)
𝑐𝑡 = 𝑓𝑡∙ 𝑐𝑡−1+ 𝑖𝑡∘ (𝑊𝑥𝑐𝑥𝑡+ 𝑊ℎ𝑐ℎ𝑡−1+ 𝑏𝑐) (3)
𝑜𝑡 = 𝜎(𝑊𝑥𝑜𝑥𝑡+ 𝑊ℎ𝑜ℎ𝑡−1+ 𝑊𝑐𝑜∙ 𝑐𝑡−1+ 𝑏𝑜) (4)
ℎ𝑡 = 𝑜𝑡∘ tanh(𝑐𝑡) (5)
2.3.2 Convolutional Long Short-term Memory
The Convolutional Long Short-term Memory architecture has been recently utilized by Shi
the usual fully connected LSTM (FC-LSTM) by using convolution for both
input-to-hidden and input-to-hidden-to-input-to-hidden connections. The formulation of the Conv-LSTM unit can be
summarized with (6) through (10). While the equations are similar in nature to (1) through
(5), the input x is fed in as images, while the set of weights for every connection is replaced
by convolutional filters. This allows the Conv-LSTM unit to keep track of less weights and
perform convolutional operations that yield better spatial feature maps. The Conv-LSTM
is more advantageous when working with images than the FC-LSTM due to its ability to
propagate spatial characteristics temporally through each Conv-LSTM state.
𝐼 = 𝜎(𝑊𝑋𝐼∗ 𝑋𝑡+ 𝑊𝐻𝐼∗ 𝐻𝑡−1+ 𝑊𝐶𝐼∘ 𝐶𝑡−1+ 𝑏𝐼) (6)
𝐹𝑡= 𝜎(𝑊𝑋𝐹∗ 𝑋𝑡+ 𝑊𝐻𝐹∗ 𝐻𝑡−1+ 𝑊𝐶𝐹∘ 𝐶𝑡−1+ 𝑏𝐹) (7)
𝐶𝑡 = 𝐹 ∙ 𝐶 + 𝑖𝑡∘ (𝑊𝑋𝐶∗ 𝑥𝑡+ 𝑊𝐻𝐶∗ ℎ𝑡−1+ 𝑏𝐶) (8)
𝑂𝑡 = 𝜎(𝑊𝑋𝑂∗ 𝑋𝑡+ 𝑊𝐻𝑂 ∗ 𝐻𝑡−1+ 𝑊𝐶𝑂∙ 𝐶𝑡−1+ 𝑏𝑜) (9)
𝐻𝑡= 𝑂 ∘ tanh(𝐶𝑡) (10)
Convolutional and element-wise multiplication operations are denoted by “∗” and
“∘” respectively. Similar to the LSTM unit, the input, forget, cell, output, and hidden state
of each timestep are denoted by I, F, C, O, and H respectively, the activation by σ, and the
weighted connections between states by a set of weights, W. However, each state is now a
matrix representing the image, while the set of weights W is a convolutional filter. Just as
the convolutional filters of the input-to-hidden connections determine the resolution of
feature maps created from the input, the convolutional filter size of the hidden-to-hidden
connections determine the aggregate information the Conv-LSTM unit receives from the
previous time-step. The transition of states between time-steps for a Conv-LSTM unit can
capture faster motions while smaller transitional kernels capture slower motions [17]. A
visualization of the process can be seen below in Figure 6. The size of the convolutional
filters in the input-to-hidden and hidden-to-hidden connections may differ depending on
both the size and speed of the observed objects. The models used in [17] and [18] are able
to successfully reconstruct a recognizable prediction of an input video sequence from the
bouncing MNIST dataset [19]. Patraucean et al. however, does not make use of peephole
connections, showing that the effectiveness of such connections in an LSTM architecture
is debatable [18]. It should be noted that a FC-LSTM can be thought of as a special case of
a Conv-LSTM, where the filter size is equal to the input image and only a single
convolutional operation is performed, and that each Conv-LSTM unit shares the same
parameter through all time-steps.
Figure 6: Inner Structure of a Conv-LSTM Unit
The models in [17] and [18] are able to successfully reconstruct a recognizable
prediction of an input video sequence from the bouncing MNIST dataset [19]. The model
effectiveness of such connections in an LSTM architecture is still unresolved. It should be
noted that a FC-LSTM can be thought of as a special case of a Conv-LSTM, where the
filter size is equal to the input image and only a single convolutional operation is
performed.
2.4. Future Video Prediction
Long Short-Term Memory networks are capable of learning long-term
dependencies. As such, they are able to extrapolate temporally sequential data given certain
inputs. Srivastava et al. [19] takes advantage of this property to train a composite
encoder-decoder model able to reconstruct the past and predict the future video sequences. More
specifically, the encoder maps an input video representation to a fixed length
representation, while the decoder extrapolates the learned encoding into the past and future
video sequences. When using only a normal encoder-decoder model, the target values of
the model determine what the model can be used for. When the target output is of the input,
the model is able to create a reconstruction of the input video sequence. When the target
output is of subsequent frames, however, the model learns to predict the subsequent video
sequence.
The model is further improved by combining both the reconstruction and prediction
models into a composite model, using both the current and future video sequences as target
outputs and potentially conditioning each step with the output of the previous
time-step (Figure 7). Reconstruction models have the tendency to learn trivial representations
the most recent frames, as they are generally the most immediately relevant, i.e, {vt-1, . . .
,vt-k} are more important than v0 when predicting vt While this is effective for specific
predictions, the loss of information from older time-steps will lead to less accurate
predictions for more general video sequences during testing. The reconstruction of both the
past and future video sequences forces the learned encoding to contain more meaningful
[image:28.612.121.495.247.481.2]data, thus improving the overall performance of the system.
Figure 7: The composite structure for unrolled LSTM unit. Blue lines represent potential conditioning
Srivastava et al. evaluates his proposed model on the Bouncing MNIST dataset,
comprised of 64x64 grayscale images (Figure 8), and a set of 32x32 natural image patches
(Figure 9) from the UCF-101 dataset [28]. It is able to successfully reconstruct and predict
a sequence of images accurately on the Bouncing MNIST images, with the best
reconstruction nor the prediction maintaining spatial resolution. The input reconstruction
does show a blurred approximation of both structure and motion though time, but the future
prediction loses cohesion in both by the fourth time-step. While the reconstructions get
sharper when more LSTM units are added to each layer, the predictions remain the same,
showing the model’s inability to extrapolate the future from the encoding. The results by
Srivastava et al. show that while the model is effective on simple synthetic images, it is
unable to learn and temporally propagate spatial features on more complex images,
[image:29.612.98.517.321.546.2]regardless of size.
Figure 9: Reconstruction and future prediction obtained from the Composite Model on a dataset of natural image patches. [19]
Shi et al. propose the use of Convolutional LSTMs with the encoder-decoder
structure for future video prediction that is able to better retain spatio-temporal information.
Its decoder is unique in that it performs a 1x1 convolutional operation across the output of
each layer to obtain an output, as opposed to looking solely at the last layer. The proposed
architecture was shown to outperform the LSTM models used by [19] when predicting
future video sequences for a synthetic Bouncing MNIST Dataset. It was also successfully
applied to a precipitation forecasting problem that used satellite imagery of clouds to
predict weather patterns (Fig. 10), showing its applicability in predicting non-synthetic
Figure 10: Two prediction examples. All of the predictions and ground truths are sampled with an interval of 3. From top to bottom: input frames; ground truth frames; prediction by the ConvLSTM forecasting network. [17]
2.5. Anomaly Detection in Videos
When labels are provided as a ground truth for anomalous actions, anomaly
detection is a problem that can be evaluated by building predictive models and considering
a binary classification problem. However, such labels are often uncommon, or unwieldy,
and the data available for training a model are limited to containing little to no anomalous
events. The available training data often result in the formulation of semi-supervised
models that can be adapted to operate in an unsupervised mode by using a sample of the
unlabeled data set as training data. Scoring techniques can be used to evaluate the output
of the models on testing data and used to label the data using domain-specific thresholds
[16].
Such techniques have been used to great effect in [5], [19], [1], [18], and [4], where
models are trained with little to no supervision and used to classify anomalous sequences
in a given video. Handcrafted features comprised of a mixture of dynamic textures and
spatial anomaly maps are used by Cong et al. in [5] to learn the “normalcy” of a video
in [19] by creating a probability distribution of low-level observations. Given a new
observation, it can calculate the likelihood of occurrence to determine whether or not it is
anomalous. The issue with hand-crafted features is that they may be too specialized, which
makes them unable to adapt to or learn unexpected events effectively. Neural networks
deal with this issue by allowing the network to learn what features are important. Zhao et
al. utilizes an unsupervised dynamic sparse coding algorithm in [1] to train dictionaries
with which anomalies are detected through the reconstruction error. Lu et al. improves
upon this in [18] by introducing an approach that directly learns sparse combinations
instead of a dictionary, thereby significantly speeding up testing. While sparse coding has
been shown to be effective, dictionaries may still contain unused or noisy elements within
the dictionary, reducing their effectiveness. Hasan et al. employs a convolutional neural
network in [4] to learn the temporal regularity of given video sequences. A regularity score
is computed from the reconstruction error and used to detect anomalous segments. While
effective, convolutional neural networks were not developed with temporal features in
Chapter 3
Anomaly Detection through Future Prediction
This chapter describes the approach used to perform anomaly detection through
future prediction using convolutional long short-term memory units. The proposed
approach is inspired by the idea that an encoder-decoder model will be able to learn and
reconstruct “regular” video sequences from the training data. This will force anomalous
data to be more difficult to reconstruct with each subsequent time-step due to error
propagation. The design of the proposed architectures used to predict future video
sequences are discussed in Section 3.1, and the evaluation algorithms used to identify
anomalous video segments is discussed in Section 3.2.
3.1. Proposed Architectures
Convolutional LSTM (Conv-LSTM) units have recently been proposed and used
by [17] and [18] (Section 2.3.2). It takes advantage of the spatial information retained by
training convolutional weights to better propagate spatial features temporally in the LSTM.
These units have been utilized to create two distinct network architectures, a Composite
Conv-LSTM Encoder Decoder, described in Section 3.1.1, and a Composite Conv-LSTM
Autoencoder, described in Section 3.1.2. The results can be found in Section 4.
3.1.1 Proposed Composite Convolutional LSTM Encoder-Decoder
The architecture is inspired by the models discussed in Section 2.4. The network
by Shi et al. utilizes only a future encoding-decoder model to predict future video
sequences, while the model by Srivastava et al. utilizes a composite conditioned structure,
but is comprised of FC-LSTM units. The proposed architecture utilizes multiple stacked
parts, the encoder, and the decoder. A high level view of the proposed model using three
[image:34.612.175.431.135.526.2]Conv-LSTM layers can be seen in Figure 11.
Figure 11: High-level view of the Conditioned Composite Conv-LSTM Encoder-Decoder. The right side is the encoder, while the left is the decoder. The decoder is split into a present and future decoder, where the future decoder is potentially conditioned with the output of the current time-step feeding into the input of the next.
3.1.1.1
Encoder
The encoder accepts a sequence of reshaped frames in chronological order as input.
non-overlapping patches, the model will lose detail but learn more significant data. Each
Conv-LSTM layer is made up of multiple Conv-Conv-LSTM units that span across the specified
number of time-steps. The outputs of the last time-step of each Conv-LSTM layer are used
as the encoding. Unlike traditional convolutional neural networks [10], the proposed model
does not utilize max-pooling layers. It instead feeds the output of each Conv-LSTM layer
directly into the next one, allowing each subsequent layer to accrue temporal changes and
focus on different features.
3.1.1.2
Decoder
The decoder is split into two parts, the past, and the future. The past decoder
reconstructs the input video segment, while the future decoder creates a prediction of what
the future video segment will be. The first time-step of both portions of the decoder are
initialized with the same encoding provided by the corresponding layers of the encoder.
The past decoder does not use anything as input to the first layer, and the output is
determined solely from the information extracted from its initialization. The outputs of
each layer are concatenated together and summed through a 1x1 convolutional filter to
obtain the reconstruction of the input. This final step essentially forces each layer to
represent the same set of input patches at different temporal features. The first layer is the
most static and will focus on still objects while the last layer will focus on larger
movements. We consider two options for the future decoder, one in which it is not
conditioned, and one in which it is. An unconditioned decoder has the same architecture as
the past decoder. A conditioned decoder uses the summed output of each time-step as the
input to the first layer of the subsequent time-step, thus “conditioning” it to the previous
As stated in [19], only the future decoder is conditioned, because the past only has
one possible outcome, while the future may vary. Conditioning potentially limits the
variation by providing more information from the previous time-step. The proposed
architecture uses a composite conditioned structure comprised of Conv-LSTM units. By
combining the approaches taken by Shi et al. and Srivastava et al., a better prediction can
be obtained for more accurate reconstruction errors. This potentially allows the model to
better learn a video’s normality, thus making anomalous video segments containing
sequences that are hard to reconstruct more likely to stand out.
3.1.2 Proposed Conv-LSTM Autoencoder
This architecture is inspired by the convolutional autoencoder network used by
Hasan et al, and is adapted for future prediction by the inclusion of an additional encoder.
The proposed architecture utilizes multiple stacked Conv-LSTM layers in conjunction with
max-pooling layers in an end-to-end trainable model. The design utilizes a two-step
encoder-decoder format, where the decoder is structured as an autoencoder (Fig. 12). The
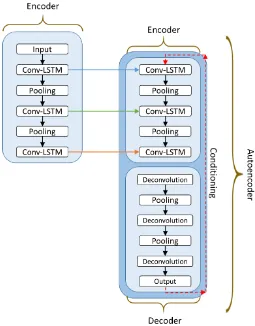
Figure 12: High-level view of the Conditioned Conv-LSTM Autoencoder. The right side is the encoder, while the left is the decoder. The decoder uses an autoencoder format and is conditioned with the output of the current time-step feeding into the input of the next. The full composite model has a duplicate of the decoder with the target output being the input frames.
3.1.2.1
Encoder
A sequence of frames is used as input to the first Conv-LSTM layer. It is then
immediately followed by a max-pooling layer. The max-pooling layer helps consolidate
the activation of neurons representing the features while increasing spatial invariance and
reducing dimensionality. The output is then fed back into any additional Conv-LSTM
layers, with the process repeating. This allows the features within large images to found
Conv-LSTM layer is an encoding and used to initialize the corresponding Conv-Conv-LSTM layers of
the decoder.
3.1.2.2
Decoder
The decoder employs an autoencoder structure, with its own encoder and decoder.
The encoder portion utilizes the same structure as the first encoder, but initializes its
Conv-LSTM layers with the encoding of the corresponding layer from the encoder. This encoder
is responsible for transforming the initialization into a traditional convolutional
autoencoder encoding at each time-step. The new encoding at each time-step is decoded
through deconvolution followed by unpooling layers to restore the image to its former size.
The deconvolution weights are tied to the input-to-cell convolutional weights from the
respective Conv-LSTM layer. Two decoders are also employed, one for the past input
video sequence, and one for the future prediction. As with the Encoder Decoder model, we
consider both an unconditional and a conditional structure for the future decoder. The
conditioned decoder accepts the output of the last layer in the previous time-step as the
input to the first layer of the current time-step.
It should be noted that this architecture does not utilize tied weights between the
encoding and decoding portions of the autoencoder. This is due to the fact that the input of
the encoder portion is not the same as the output of the decoder, as the architecture
extrapolates the future.
3.1.3 Parameters of Note
The proposed architecture has many more parameters than a convolutional or
size of each connection in a Conv-LSTM unit, the number of Conv-LSTM units in a layer,
the number of layers, the input and target segment lengths, and the patch size by which a
frame is reshaped.
The number of Conv-LSTM layers is important in that it determines the number of
chances temporal information have to be transmitted in a model. For instance, the third
time-step in the first layer could only receive information from the input and the previous
two time-steps. The same time-step at the third layer would receive the same, but the input
of each step from the second layer may receive information from the previous
time-steps of that layer. At the same time, only so many layers can be added before the data
propagated through time becomes redundant. The input-to-hidden filters serve a similar
purpose to the convolutional filters in traditional convolutional neural networks. As
discussed in Section 2.3.2 however, the filter size of hidden-to-hidden connections is
responsible for both controlling the propagation of information between states and
capturing motion between frames. It is therefore important to examine the speed of objects
in the target domain when selecting this parameter.
The input and target lengths determine the amount of information to be encoded
and extrapolated, respectively. The longer the input length is, the more information it will
have to learn, i.e. what data is meaningful and should be propagated into the encoding. At
the same time, this comes at the cost of additional parameters that increase the memory
and computational cost. Conversely, a longer output requires more information to be
extrapolated from a single encoding. The patch size determines the complexity of the
model.A large patch size will result in more detailed feature maps. However, not all
down into smaller motions that can be modeled together. A larger patch size is therefore
more likely to produce more noise and contain non-essential information.
It is also important to select a proper non-linearity function to prevent the issue of
vanishing gradients, a suitable loss function to calculate the deviation between the target
and model outputs, and an appropriate update function to learn weights efficiently.
3.2. Evaluation Algorithm
A trained model can be used to obtain a reconstruction of the input video sequence and
prediction of its subsequent frames. This reconstruction can be visualized for a qualitative
inspection by the user, or quantified for use in evaluation algorithms. In a qualitative
inspection of the reconstruction and predictions, anomalous events will be more likely to
stand out, as the trained model does not have the necessary information to properly
reconstruct or predict it. For a quantitative assessment, the reconstruction and prediction
errors will be recorded and used in an evaluation algorithm. The reconstruction error, e, is
obtained by taking the total Mean Squared Error (MSE) as defined in Eq. (11), where 𝜃̂ is
the pixel value of the model’s output, 𝜃 is the target value, n is the number of pixels per
frame, and p is the number of frames.
𝑒 = ∑ ∑(𝜃̂𝑘𝑖− 𝜃𝑘𝑖)2
𝑝
𝑖=1 𝑛
𝑘=1
(11)
The quantitative evaluation algorithm used in this thesis is based on the one used
by [19]. A regularity score is computed from the error values. The regularity score
reconstructions from the same video, as different videos may have different notions of
abnormality. The regularity 𝑔(𝑥) of a sequence can be computed as follows:
𝑔(𝑥) = 1 −
𝑒(𝑥) − min
𝑥 𝑒(𝑥)
max
𝑥 𝑒(𝑥)
(12)
where x is the output reconstruction sequence and 𝑒(𝑥) is the reconstruction error of that
sequence. Video sequences containing normal events will have a high regularity score since
it is similar to the data used to train the model, while sequences containing abnormal events
will have a low regularity score. Abnormal events will cause the prediction reconstructions
to diverge further from the target output, as the model will not contain information to
support it. Distinct local minima or scores below a certain threshold from a time series of
regularity scores can therefore be used to determine the location of abnormal video
sequences.
This thesis improves upon the methodology by Hasan et al. by using Conv-LSTMs
to learn better spatio-temporal features and making use of both distinct local minima and
maxima within the evaluation algorithm to determine anomalous regions more accurately.
The distinct points are found with a filter using the Persistence 1D algorithm [30]. The
algorithm finds such points by finding local minima and maxima after smoothing the
function using a biharmonic reconstruction. Distinct local minima represent video
sequences that are highly likely to contain anomalies. Regions of anomalous video
segments are proposed based on the minima found. Points that are within a certain
threshold can be considered to be part of the same anomalous sequence. Distinct local
maxima potentially represent regular video sequences that take place immediately before
limiting the length of the proposed anomalous segment. More specifically, the new
proposed region border is midway between the maxima and minima. This constraint is
precluded when the distinct maxima is between two distinct minima that are considered to
be of the same anomalous sequence. The proposed anomalous regions are recorded for
every video evaluated and compared to the ground truth. Anomalies are considered
detected if a certain percentage of the proposed detection is overlapped by the ground truth
anomaly. Multiple detections of the same anomaly are considered a single true positive
detection.
3.2.1 Parameters of Note
The evaluation algorithm has several tunable parameters. The length of the
proposed anomalous segment directly impacts how likely it is for it to overlap the ground
truth anomalous segment. A large area may include the actual anomaly, but contain large
sequences of data that are normal. Conversely, it is more likely for a small area to include
only the anomalous region, but is less likely to do so and may not encompass the entire
thing. The overlap percentage is responsible for determining if the proposed anomalies are
actually anomalies. A low percentage means that it would be correct even if only a tiny
portion of the proposal is correct, while a high percentage would require very high
precision for it to match the ground truth. The distance by which two distinct minima would
be considered of the same anomaly ties into this by affecting the area of the anomalous
segment, as it merges the proposed segments based on both minima.
anomalous video segment, while each distinct maximum helps constrain the regions for
more accuracy. It should be noted that the evaluation algorithm is more likely to be accurate
in longer video clips. Shorter videos are more likely to have anomalies near the beginning
of end of the video, thus reducing the amount of information provided and making it harder
Chapter 4
Experimental Results
4.1. Experimental Setup
The proposed system is designed, coded, and trained using Lasagne. Lasagne is a
lightweight library used to build and train neural networks in Theano. Its supports many
different neural network implementations including, but not limited to, dense networks,
Convolutional Neural Networks, and recurrent networks. It is also highly modular with
every part able to be used independently of Lasagne, transparent with its source code easily
understandable and available in Python, and easily modified. The last part is especially
important, as the source code for the Conv-LSTM unit used in [6] was not yet available
when work for this thesis was started. Caffe was considered but not chosen. While it is
easy to implement existing networks in Caffe, it is much more difficult to modify the source
code. Classes in Lasagne were modified to allow for a Conditioned Encoder-Decoder
implementation of a Conv-LSTM network.
MATLAB was chosen as the tool used to evaluate the model outputs and detect
anomalies. It is a powerful tool that allows for a quick visualization of both the regularity
scores and reconstructions. A prototype of each proposed network was first tested and
evaluated to ensure that the code written was working as intended. The proposed networks
were then evaluated to determine the most effective one. The best model was then trained
and evaluated over multiple datasets. The outputs were analyzed qualitatively through a
visualization of the past reconstruction and future prediction, and quantitatively by
comparing the average loss and detection rates. Matlab was used to visualize the
4.1.1 Dataset Selection
The datasets used in the experiments are the Bouncing MNIST dataset [19], UCSD
Pedestrian Datasets [8], Avenue Dataset [14], and Subway Datasets [3]. The results used
for comparison were obtained from [15] and [9].
The Bouncing MNIST dataset is a synthetic dataset comprised of 10,000 video
sequences, with each sequence depicting two MNIST [21] figures moving around in a
64x64 pixel area, and 20 frames long (Figure 13). It is used by [17] and [19] to show that
their models are able to predict and reconstruct future video sequences.
Figure 13: Three samples of the first ten frames from three sequences of the Bouncing MNIST dataset
The UCSD Pedestrian dataset is comprised of two subsets, Pedestrian 1 and
Pedestrian 2, that each depict the activities of a different pedestrian walkway and are further
split into training and testing data. The training data contains only the “regular” activity of
pedestrians, while the test data contains “anomalous” events including but not limited to
people skateboarding, cycling, and driving small vehicles (Figure 14).
The Subway dataset is split into two subsets, Enter and Exit (Figure 15). The first
subset depicts people entering a subway station, while the second shows them leaving.
Figure 14: Images from the UCSD Pedestrian dataset. The left and right columns are from the Pedestrian 1 and 2 subsets respectively.
[image:46.612.91.523.419.671.2]The Avenue dataset captures activity on a CUHK campus avenue (Figure 16). The
images are in RGB and contain images of activity that are generally larger than those found
in the UCSD and Subway datasets. Like the other two, it also contains both a training and
testing dataset.
Figure 16: Images from the Avenue Dataset.
The Bouncing MNIST dataset is only evaluated on the baseline Future Conv-LSTM
Encoder Decoder model seen in Section 2.4. As it was also used by [17] and [19] in their
experiments, the preliminary results obtained from it are used as a benchmark to ensure
that the base code is working correctly. While useful as an initial validation for the base
network code, it is unable to show whether or not the model is applicable to the problem
explored in this thesis. The Bouncing MNIST dataset is synthetic and simplistic, while the
videos relevant to the problem domain are all natural footage.
The UCSD Pedestrian 1 dataset was chosen as the benchmark dataset for all
experiments done in this thesis. It is used to find the most effective model by tuning the
parameters discussed in Section 4.3.1. Once the optimal model was found, it was then
4.2. Preliminary Code Validation
Prototypes of the encoder-decoder and autoencoder networks that are only able to
perform future prediction are evaluated on Bouncing MNIST data. The initial parameters
selected for the preliminary future Conv-LSTM encoder-decoder used to evaluate the
Bouncing MNIST (BMNIST) dataset are based on the parameters used in [17]. The
convolutional filter size used for both the input-to-hidden and hidden-to-hidden
connections was 5x5. Since the target pixels are either black or white, a sigmoid
nonlinearity was applied to the output of the convolutional layer, and a binary cross entropy
was used as the loss function. Three Conv-LSTM layers were used, with 256, 128, and 128
filters respectively. As in [6], RMSProp [31] with a learning rate of 10−4 and decay rate of
0.9 is used. An input and output length of five frames each was selected, as the accuracy
of the reconstructions is prioritized over an abstraction of predicted motion. As the
parameters for the Conv-LSTM Autoencoder model are similar, the same parameters are
chosen for use when applicable.
The models are compared with an implementation of the precipitation forecasting
model used by Shi et al. While it is not stated in [17], the released code by Shi et al. also
reconstructs the output of the last time-step of the input. A comparison of the average
binary cross entropy per frame between the model output and ground truth, as seen in Table
1, would show that the forecasting model performed the best while the autoencoder model
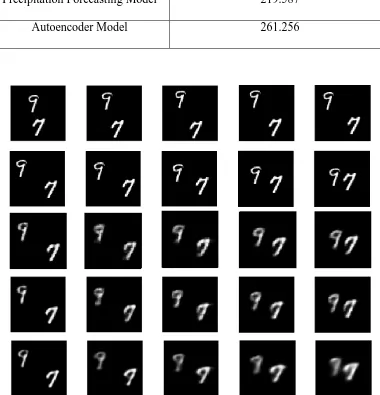
performed the worst. This is misleading because it averages in the input reconstruction
output of the encoder. A visualization of the outputs in Figure 17 shows that output of the
encoder-decoder model has a much higher resolution than the autoencoder model, whose
were evaluated to make sure the code was written correctly, they were only trained using
a mini-batch for 20,000 iterations, and the parameters were not optimized.
Table 1: A comparison of Loss between the prototype networks trained on the Bouncing MNIST dataset
Average Binary Cross Entropy Per Frame
Encoder-Decoder Model 238.406
Precipitation Forecasting Model 219.587
[image:49.612.116.496.231.626.2]Autoencoder Model 261.256
4.3. Parameter Selection
4.3.1 Model Parameters
The input images are resized to 224x224 pixels and converted to grayscale. A
preliminary Conv-LSTM Encoder-Decoder baseline model was evaluated for use as
reference in parameter selection. The baseline model utilizes parameters similar to the
prototypes tested in Section 4.2, with an input length of five, output length of five, a filter
size of 5x5, three Conv-LSTM layers, and a total of 512 Conv-LSTM filters. A sigmoid
non-linearity is also applied to the final convolutional layer.
The parameters tested in variations of the baseline model include the length of both
the input and output, the filter size, and the non-linearity function (Table 2). The model
with an input length of ten outputs a slightly lower MSE per frame, but takes 1.5 times the
amount of time to train, making it largely inefficient. Furthermore, the more time-steps into
the future the model predicts, the worse each prediction becomes (Table 1). A filter size of
3x3 was considered as the objects in the datasets utilized move more slowly than the one
used by [17]. As most convolutional neural networks use a rectified linear unit (ReLU)
nonlinearity function, that is tested as well. Ultimately, the parameters used by the baseline
model are shown to be the most effective. As the parameters for the Conv-LSTM
Autoencoder model are similar, the same parameters are chosen for use when applicable.
The binary cross entropy loss function is not suitable for natural images like those
seen in the UCSD Pedestrian dataset. The loss function for the baseline model is therefore
changed to Mean Square Error. All other parameters remain the same. Evaluations using
The parameters changed include the number of layers, and the number of
Conv-LSTM units per layer. While traditional convolutional layers apply a rectified linear unit
(ReLU) nonlinearity to the output, a sigmoid nonlinearity is also considered. The total
number of units remain the same though, (i.e., one layer has 512 units, while two layers
may have 256 units in each). The input and output length are set at ten for two different
experiments. The best model parameters are then used to evaluate a composite and
[image:51.612.103.507.303.526.2]conditioned composite model.
Table 2: Comparing reconstruction accuracy performance
Parameters Modified
(Input Length, Output Length, Filter Size, Output Nonlinearity)
Average MSE Per Frame
(5, 5, 5x5, Sigmoid) 20.5076
(10, 5, 5x5, Sigmoid) 17.46702
(5, 10, 5x5, Sigmoid) 23.0266
(10, 10, 5x5, Sigmoid) 24.8644
(5, 5, 3x3, Sigmoid) 30.183
(5, 5, 5x5, ReLU) 24.8302
For the UCSD Pedestrian 1 and 2 datasets, the last training video sample was held
out for validation. For the Subway and Avenue datasets that have only one video for
training, the last twentieth of the video was held out for use as validation. Early stopping
4.3.1.1
Optimization and Initialization
The cost function of eq. (11) was optimized with RMSProp [31]. It uses a running
average over the root mean squared of recent gradients to normalize the gradients and
divide the learning rate. A learning rate of 10−3 and decay rate of 0.9 are used. Adagrad
[33] and Adam [34] were both considered and tested as well, but RMSProp was empirically
chosen for its smaller resulting loss values. The learning rate is set to .0001. We use a
mini-batch of five video sequences and train the models for up to 25,000 iterations. Early
stopping is performed based on the validation loss if necessary. The weights are initialized
using the Xavier algorithm [35]. The algorithm automatically scales the initialization based
on the number of input and output neurons to prevent the weights from starting out too
small or large. This is significant, as weights that start too small cause a reduction of
variance in the output that propagate a decrease in both the weights and values until they
become too small to matter. Similarly, too large of a starting weight will cause the learned
weights and outputs to explode in magnitude [31]. It is also an important factor in speeding
up and ensuring the convergence of the network. The convolutional filters within the
input-to-hidden and hidden-input-to-hidden states in the Conv-LSTM units all use the same filter size
in this thesis. It should be noted that while units share the same parameters at each timestep,
the filter sizes of different states within the unit may differ in size if necessary.
4.3.2 Evaluation Parameters
A temporal window of fifty frames before and after distinct local minima is used
to propose anomalous regions, as most anomalous activities are approximately one hundred
be a part of same abnormal event. We consider a detected abnormal region as a correct
detection if it has at least fifty percent overlap with the ground truth. A parameter-sweep
at intervals of 0.05 is performed to determine the threshold parameter for the Persistence1D
algorithm [30]. Since abnormal events are unique to each target video domain, a different
threshold is selected for each dataset.
To make the results easier to visualize, the regularity score and its evaluation are
graphed. Distinct local minima are represented by a blue dot, distinct local maxima are
represented by a red dot, the anomalous ground truth regions are highlighted in red, and
the proposed anomalous regions are highlighted in green. It should be noted that the last
nine frames are not evaluated since the model requires a minimum of ten frames, five as
the input and five as the target, to return a reconstruction score.
4.4. Results
4.4.1 Predicting Past and Future Video Sequences
The learned models are able to successfully reconstruct the past and predict the
future. The encoder-decoder based model performs significantly better than the
autoencoder based models (Table 3), with the former an average MSE per frame of less
than a tenth of the latter. Contrary to our expectations, the unconditioned model performed
slightly better that the conditioned version. We were not able to test the conditio
![Figure 8: Reconstruction and future prediction obtained from the Composite Model on a dataset of Bouncing MNIST images [19]](https://thumb-us.123doks.com/thumbv2/123dok_us/39640.3227/29.612.98.517.321.546/figure-reconstruction-future-prediction-obtained-composite-dataset-bouncing.webp)