A Two Phase Approach for Solving Linear
Programming Problems by Using Fuzzy Trapezoidal
Membership Functions
I. U. Khan, T. Ahmad, N. Maan
Abstract– The two well known methods for solving the linear
programming problems are, i) Converting the problems to its crisp equivalent and ii) Solving the problem without converting it to its crisp equivalent using the fuzzy arithmetic. In this work we use fuzzy trapezoidal membership functions for the objective function and the constrained resources of the linear programming problem and solve it by converting the problem to its crisp equivalent. The degree of uncertainty in trapezoidal fuzzy numbers is greater than the triangular fuzzy numbers. Trapezoidal membership functions can be effectively used in situations where the decision maker is equally satisfied at different points in the acceptable ranges for the constrained resources.
The two phase approach maximize-s/minimizes the degree of membership in the objective function for the different cases arising due to the use of the fuzzy trapezoidal membership functions. The proposed method presents a complete model for optimization of constrained multiple objective linear programming problems to the decision maker. A counter numerical example is used to elaborate our assertions.
Index Term-- Fuzzy Linear Programmi-ng, Decision Analysis, Fuzzy Trapezoid-al Membership Function.
I. INTRODUCTION
A fuzzy linear programming problem can be mathematical denoted as,
Max /Min
s.t,
,
0.
t
z
c x
Ax
b
x
(1)
Where the symbol “ ” is denoting the fuzziness of the programming problem.
Definition: By [4], the height of a fuzzy set “A” in a universe “X” is defined and denoted as,
( )
Sup
A( )
x X
h A
x
(2)I. U. Khan is a PhD Scholar of COMSATS Institute of Information Technology Abbottabad, Pakistan at the Department of Mathematics, Faculty
of Science,
Universiti Teknologi Malaysia, 81310 Skudai, Johar Darul Ta’zim, Malaysia.
T. Ahmad is with the Department of Mathematics, Faculty of Science, Universiti Teknologi Malaysia, 81310 Skudai, Johar Darul Ta’zim, Malaysia.
N. Maan is with the Department of Mathematics, Faculty of Science, Universiti Teknologi Malaysia, 81310 Skudai, Johar Darul Ta’zim,
Malaysia. [email protected]
If h (A) =1 then the fuzzy set A is called a normal fuzzy set. Definition: A fuzzy set “A” in n
R
is a convex fuzzy set if and only if,1 2 1 2
1 2
(
(1
)
)
min(
( ),
(
))
,
,
0
1.
(3)
A A A
n
x
x
x
x
x x
R
An optimized solution satisfying (1) is called a feasible optimal solution. It is well known that the fuzzy set bounded by the feasible optimal solutions is normal and convex. But in many cases, the resulting crisp linear programming problems do not have unique optimal feasible solutions but multiple feasible solutions. Werners [3] showed that the solution given by max-min operator may not be efficient. Lee and Li [5] used the technique of Pareto optimality for solving multiple objective linear programming problems. A two phase approach has been used in [13], [14] for solving the linear programming problems. They showed that the max-min operator does not produce a fuzzy efficient compromise solution and therefore employed a two phase approach. They used a triangular membership function for the objective function and the constraints. Zimmermann and Zysno [6] argued that most of the real world problems are neither non compensatory (min operator) nor full compensatory (average operator). A compromised model between non compensatory (min operator) and full compensatory (average operator) has been presented in [15] for getting a fuzzy efficient solution.
Kumar et al., [1] introduced a new method for solving fully fuzzy linear programming problems with equality
constraints by using ranking function with triangular fuzzy numbers. Maleki [7] and [8] also employed the method of ranking functions for solving the fuzzy linear programming problems. Nasseri et al., [12], [9] and [10] ordered
trapezoidal fuzzy numbers by the method of ranking function for solving linear programming problems without converting the problem to its crisp equivalent. Here we use fuzzy trapezoidal membership functions for converting the objective function and the constraints to its crisp equivalent and then solving the problem as a crisp linear programming problem.
II. RESEARCH METHODOLOGY
Two phase approach with fuzzy trapezoidal membership functions:
Max
s.t,
,
0.
t
z
c x
Ax
b
x
(4)
The possible range for the objective function of P1-FLP1 is given by,
LP (b+
p
)Max
s.t,
,
0.
t
z
c x
Ax
b
p
x
(5)
Also,
LP (b+
p
)Max
s.t,
,
0.
t
z
c x
Ax
b
p
x
(6)
Where
p
andp
are the lower and upper aspiration levels of the decision maker.Now by [2] the fuzzy trapezoidal membership function of the objective function is given by,
0( )
0,
for
,
for
1,
for
(7)
,
for
0,
for
t
t l t
t l
l c
c l
t c z c x
t
t u
c u
u d
t u
c x
z
c x
z
z
c x
z
z
z
z
c x
z
c x
z
c x
z
z
z
c x
z
Also the
membership functions of the ith constraint is given by,
( )
0,
for
, for
1,
for
(8)
, for
0,
for
i i i
i i i
i i i i
i
i x i i
i i i
i i i i
i
i i i
A x
b
p
A x b
p
b
p
A x
b
p
b
A x
b
p
A x
b
A x
b
p
p
A x
b
p
Where
i
A
denotes the ith row of A andi
p
andp
i are the lower and upper aspiration levels of the constrained resources for thedecision maker.
Now the decision maker can optimize his objective function in the following aspiration levels.
A. Both Objective Function and Constraints Lie in The Lower Aspiration Level.
When
z
l
c x
t
z
c andb
i
p
i
A x
i
b
iFrom (7) and (8), we can see that for maximization of the objective function and a higher degree of membership its crisp
value must lie within the range
z
l
c x
t
z
c. For the better utilization of the constrained resources and a higher degree of membership its crisp value must lie within the rangei i i i
b
p
A x
b
.Now applying [11], the max-min operator results in the following problem.
Phase I FLP
Max
s.t,
( )
(
0,1, 2, 3,..., )
0,
[0,1]
i
x
i
m
x
(9)
Here
0( )x =
0(
c x
t)
and
i( )
x
i(
A x
i)
Let the optimal of the phase 1 be
( ,
x
*
*)
. Phase II FLPIn the phase II a solution is obtained which is better than the phase I solution and is called the fuzzy efficient compromise solution of the linear programming problem.
0
*
Max
s.t,
( )
,
(
)
,
[0,1],
0, (
0,1, 2,..., )
m i i
i i
i i
i
x
x
x
i
m
(10)
Let suppose
(
x
**,
0**,
1**,...,
m**)
to be the optimal ofphase II linear program which is the fuzzy efficient compromise solution of the problem (P1-FLP1).
B. Both Objective Function and Constraints Lie in The Upper Aspiratio-n Level.
When
z
c
c x
t
z
u andb
i
A x
i
b
ip
iBack from (7) and (8), we conclude that for a higher degree of membership of the objective function its crisp value must be
within the range
b
i
A x
i
b
ip
i . In other words, the degree of membership of the objective function must beminimized to lie in the range
z
c
c x
t
z
uwith the constrained resources to lie in the rangeb
i
A x
i
b
ip
i . Apply [11], the max-min operator results in the following problem.Phase I FLP
Min
s.t,
( )
(
0,1, 2, 3,..., )
0,
[0,1]
i
x
i
m
x
(11)
Here
0( )x =
0(
c x
t)
and
i( )
x
i(
A x
i)
. Let the optimal of the phase- I is be( ,
x
*
*)
. Phase II –FLP0
*
Min
s.t,
( )
,
(
)
,
[0,1],
0, (
0,1, 2,..., )
m i i
i i
i i
i
x
x
x
i
m
(12)
Giving
(
x
**,
0**,
1**,...,
m**)
to be the optimal of phase II linear program which is the fuzzy efficient compromise solution of the problem (P1-FLP1).C. Objective Function Lie in The Lower Aspiration Level and Constra-ints Lie in The Upper Aspiration Level.
When
z
l
c x
t
z
candb
i
A x
i
b
ip
iFrom (7) and (8), we can see that for maximization of the objective function and a higher degree of membership its crisp
value must lie within
z
l
c x
t
z
c. For the better utilization of the constrai-ned resources and a higher degree of membership its crisp value must be restricted to lie within therange
b
i
A x
i
b
ip
i.On applying [11], the max-min operator results in the following problem.
Phase I FLP
Max
s.t,
( )
(
0,1, 2, 3,..., )
0,
[0,1]
i
x
i
m
x
(13)
Here
0( )x =
0(
c x
t)
and
i( )
x
i(
A x
i)
Let the optimal of the phase 1 be( ,
x
*
*)
. Phase II –FLP0
*
Max
s.t,
( )
,
(
)
,
[0,1],
0, (
0,1, 2,..., )
m i i
i i
i i i
x
x
x
i
m
(14)
Giving
(
x
**,
0**,
1**,...,
m**)
to be the optimal of phase II linear program which is the fuzzy efficient compromise solution of the problem (P1-FLP1).D. Objective Function Lie in The Upper Aspiration Level and Constraints Lie in The Lower Aspiration Level.
When
z
c
c x
t
z
uandb
i
p
i
A x
i
b
i.Again from (7) and (8), we can see that for a higher degree of membership of the objective function its crisp value must be
restricted to lie within the range
z
c
c x
t
z
u. For the better utilization of the constrained resources and a higher degree of membership its crisp value must lie within the rangei i i i
b
p
A x
b
. In other words, the degree of membership of the objective function must be minimized tolie in the range
z
c
c x
t
z
u with the constrained resources to lie in the rangeb
i
p
i
A x
i
b
i.Using [11], the max-min operator results in the following problem.
Phase I FLP
Min
s.t,
( )
(
0,1, 2, 3,..., )
0,
[0,1]
i
x
i
m
x
(15)
Here
0( )x =
0(
c x
t)
and
i( )
x
i(
A x
i)
Let the optimal of the phase- I be( ,
x
*
*)
. Phase II –FLP0
*
Min
s.t,
( )
,
(
)
,
[0,1],
0, (
0,1, 2,..., )
m i i
i i
i i
i
x
x
x
i
m
(16)
Let
(
x
**,
0**,
1**,...,
m**)
be the optimal of phase II linear program which is the fuzzy efficient compromise solution of the problem (P1-FLP1)III. NUMERICAL EXAMPLE
In this section we introduce a numerical example to verify our results. Consider the fuzzy linear programming problem.
1
3
1 2 3
1 2 3
2 1 2 3
1 2 3
1 2 3
Max
5
3
12
s.t,
( )
20,
( )
9
3
4
90,
( )
5
4
8
120,
,
,
0.
z
x
x
x
g x
x
x
x
g x
x
x
x
g x
x
x
x
x x x
Here
p
1
10
,p
1
15
,p
2
20
,p
2
30
,p
3
30
,3
60
p
are the upper and lower tolerances for the corresponding constrained resources. Now the member-ship functions for the three fuzzy constraints are givenbelow.
1
1
1
1
1
1
1
1
0,
for
( ) 10
( ) 10
, for 10
( )
20
10
( )
1,
for
( )
20
35
( )
, for 20
( )
35
15
0,
for
( )
35
g x
g x
g x
x
g x
g x
g x
g x
2
2
2
2
2
2
2
2
0,
for
( ) 70
( ) 70
, for 70
( )
90
20
( )
1,
for
( )
90
120
( )
, for 90
( ) 120
30
0,
for
( )
120
g
x
g
x
g
x
x
g
x
g
x
g
x
g
x
3
3
3
3
3
3
3
3
0,
for
( ) 90
( ) 90
, for 90
( ) 120
30
( )
1,
for
( )
120
180
( )
, for 120
( ) 180
60
0,
for
( )
180
g x
g x
g x
x
g x
g x
g x
g x
We
solve the objective function for the upper and lower ranges and get,
z z
l,
u
150, 240
.Now the membership function for the objective function with
a lower and Upper tolerance
p
= 40 andp
= 50 becomes,0
0,
for
( ) 150
( ) 150
,
for 150
( ) 190
40
( )
1,
for
( )
190
240
( )
,
for 190
( )
240
50
0,
for
( )
240
z x
z x
z x
x
z x
z x
z x
z x
Here
we suppose to optimize the objective function in the lower aspiration level and the constrained resources in the upper
aspiration level. That is when
(
150
z x
( )
190
,1
20
g x
( )
35
,2
90
g x
( ) 120
and3
120
g x
( )
180
)We can see that for a higher degree of membership of the objective function its crisp value must be maximized to lie in the range190
z x
( )
240
,whereas for the better utilization of the constrained resources and a lower degree of membership (as it is desired for better utilization of resources) its crisp valuemust be restricted to lie within
(
1
20
g x
( )
35
,2
90
g x
( ) 120
and3
lie in the range
150
z x
( )
190
with the constrai-nedresources to lie in the ranges,
1
20
g x
( )
35
,2
90
g x
( ) 120
and3
120
g x
( )
180
.(Phase I LP)
1 2 3
1 2 3
1 2 3
1 2 3
1 2 3
Max
s.t,
5
3
12
50
240,
15
20,
9
3
6
30
120,
5
4
8
60
180,
,
,
0,
0,1 .
x
x
x
x
x
x
x
x
x
x
x
x
x x x
Optimal solution of phase I LP is,
* *
1
* *
2 3
( ) 165.00,
3.00,
10.00,
10.00
z x
x
x
x
* *
1 2
* 3
(
)
23.00,
(
) 117.00,
(
) 135.00
g x
g x
g x
* *
0 1
* *
2 3
(
)
0.375,
(
)
0.8,
(
)
0.1,
(
)
0.75.
x
x
x
x
(17)(Phase II)
0 1 2 3
1 2 3 0
1 2 3 1
1 2 3 2
1 2 3 3
1 2 3
0
1
2
Max
s.t,
5
3
12
50
240,
15
20,
9
3
6
30
120,
5
4
8
60
180,
,
,
0,
0,1 .
[0.375,1]
[0.466,1]
[0,1]
x
x
x
x
x
x
x
x
x
x
x
x
x x x
3
[0.516,1]
Optimal Solution of phase II LP is,
** **
1
** **
2 3
(
) 165.00,
9.00,
12.00,
7.00
z x
x
x
x
** **
1 2
** 3
(
)
28.00,
(
) 159.00,
(
) 149.00
g x
g x
g x
** **
0 1
** **
2 3
(
)
0.375,
(
)
0.466,
(
)
0.0,
(
)
0.516.
x
x
x
x
(18)IV. RESULTS AND DISCUSSION
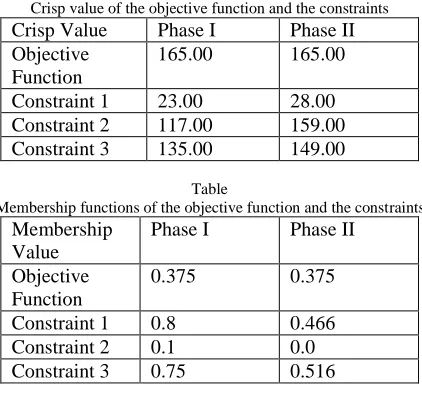
Comparing the results obtained in (17) and (18) we can easily deduce that the membership function of the constrained resources decreases to lie in the upper aspiration level. This is what the decision maker desires. In other words, the degree of membership of the constrained resources is minimized to lie in the upper aspiration level, thus giving a better utilization of the resources. A keen decision maker is always concerned with the minimization of the utilization of the scarce resources. So the solution is more efficient than the phase I LP.
A comparative evaluation of the Phase-I and Phase-II solutions of the linear programming problem is given in the Table. I and Table. II respectively.
Table II
Crisp value of the objective function and the constraints
Crisp Value Phase I Phase II Objective
Function
165.00 165.00
Constraint 1 23.00 28.00
Constraint 2 117.00 159.00 Constraint 3 135.00 149.00
Table
Membership functions of the objective function and the constraints
Membership Value
Phase I Phase II
Objective Function
0.375 0.375
Constraint 1 0.8 0.466
Constraint 2 0.1 0.0
Constraint 3 0.75 0.516
A comparative study of the results given in Table. 1 and Table. 2 suggest that the solution obtained by the two phase approach is more efficient in terms of utilization of
resources and optimization of the objective function.
V. CONCLUSION
REFERENCES
[1] A. Kumar, J. Kaur, & P. Singh, “A new method for solving fully fuzzy linear programming problems,” Applied Mathematical
Modeling, vol. 35, pp. 817-823, 2011.
[2] A. Kaufmann & M. M. Gupta, “Fuzzy mathematical models in
engineering and management science,” (1st Ed.). The Netherlands:
Elsevier Science Publishers B.V Amsterdam, (Chapter 3), 1988. [3] B. Werners, “Interactive multiple objective programming subject
to flexible constraints,” European Journal of Operational
Research, vol. 31, pp. 342-349, 1987.
[4] C. R. Bector & S. Chandra, “Fuzzy mathematical programming
and fuzzy matrix games,” (1st Ed.). Studies in fuzziness and soft
computing, Berlin Heidelberg: Springer-Verlag, vol. 169, (Chapter 2), 2005.
[5] E. S. Lee & R. J. Li, “Fuzzy multiple objective programming and compromise programming with Pareto optimum,” Fuzzy Sets and
Systems, vol. 53, pp. 275-288, 1993.
[6] H. J. Zimmermann & P. Zysno, “Latent connectives in human decision making,” Fuzzy Sets and Systems, vol. 4, pp. 37-51, 1980. [7] H. R. Maleki, “Ranking functions and their applications to fuzzy linear programming,” Far East J. Math. Sci., vol. 4, pp. 283-301, 2002.
[8] H. R. Maleki, M. Tata & M. Mashinchi, “Linear programming with fuzzy variables,” Fuzzy Sets and Systems, vol. 109, pp. 21-33, 2000.
[9] K. Ganesan & P. Veeramani, “Fuzzy linear programs with trapezoidal fuzzy numbers,” Ann. Oper. Res. vol. 143, pp. 305-315, 2006.
[10] N. M. Amiri & S. H. Nasseri, “Duality results and a dual simplex method for linear programming problems with trapezoidal fuzzy variables,” Fuzzy Sets and Systems, vol. 158, pp. 1961-1978, 2007. [11] R. E. Bellman & L. A. Zadeh, “Decision making in a fuzzy environment,” Management Science, vol. 17, pp. 141-164, 1970. [12] S. H. Nasseri, E. Ardil, A. Yazdani, & R. Zaefarian, “Simplex
method for solving linear programming problems with fuzzy numbers,” Proceedings of World Academy of Science, Engineering
and Technology, vol. 10, pp. 284-288, 2005.
[13] S. M. Guu & Y. K. Wu, “Weighted coefficients in two-phase approach for solving multiple objective programming problems,”
Fuzzy Sets and Systems, vol. 85, pp. 45-48, 1997.
[14] S. M. Guu & Y. K. Wu, “Two phase approach for solving the fuzzy linear programming problems,” Fuzzy Sets and Systems, vol. 107, pp. 191-195, 1999.
[15] Y. K. Wu & S. M. Guu, “A compr-omise model for solving fuzzy multiple objective linear programming problem-s,” Journal of