'l']lJi; ON
OJi' FOWK£I
f'o:c
Doctor of
irl
of
ERRATA FeB.
"The Effect of Regulating Elements on the ]):'l!H1ulic
Behaviour of ~Jower ;)Jstems."
pa e
12.
equation,2.1)
Xl fl,
x
l,x
2' •••••• ,xnetc •
.
pa e
43.
e'luation(3.16)
= ( g' + g' ) (
1
+h)3/2 _
n-'o ~o
a e
49.
eCluationD.46)
left hand side siould be e
a e
70.
second last li~e should readefficient ( zero for constant tor~ue and -1 for constant power ),
fi
.17
Base 0.16
fi
.26
Omit G = 1.0
a e
166.
fifth lineHaireici par meter table
from caption
Tb Hydraulic toru~ue for part load e,,,-uili briulfl oi)er~tion with
rated speed and head.
I wish
thEmk
lTIy behalf'@
M:r
to
Woodward t.heir
Dr Butn
to Ike
ana. 1+ t r,j. s
Mr Millard and
at
the New Zealand
[ am support~
I thank the
staff ofthe
Mobil m;sisbJ:tl.ce in Lterg o.f:Ln
Perrfold
in 811 sta
fl
heir on
Genera1 of the New Ze
conneC
I
to
fat' vEtlu.able ,i:i~seussions of'
the Direntors of the
fo:1:' their Ba:LnhE~r
J NrrTID])lJC'L' ION
1
1
1. h Init:i.al C;rmsideY's.tions
1
G
'i of Povre:c1 2 ration of
1 ~ ;( }")OW6:('
. .1
'1 <
2
261 Introch).r.:tion 2 Definition::!
2. 1 De tion of
2"
5
TVfO theo1"crnG of2. ~['he f,lJbov Jviethoil for the Construotion of
?" 1 The
trun
of t.ho [:~e:c:Les Solution 2 m.3 j Solution of the 1/ecurrenoe
'l'he lvT atrix
[
G)
]
1
2 'J'ests fen' the cia1
2
.3
He(
,,12) and(
~?2 )D:tsc;l:tssion of ng
'['uT'bine Col.LiJllfl
5
'l'he Gate Position v8..tion~) 1 The Mechanical Inertia
')" ~'he '[1urb:i.ne
:3
I) 'rb.8 GovernorPilot j\ctuato:e
of
'I Calculation of the from
r~ 8:blJ,lcrJdon
CI1I\.Tjfl:iH II
1 tion
2 }i.:valuation of the lviode] of ConCllti
2", 'I'he Niethod of 'i\!valuation 'Che Determtnation of
~
c ' 1 '['he of
'1"
3
2 A CorrectIvlet.bo(1 of
JL:f'f'ect of' 1.0813 on the
P:r.nct:i .. caJ l~ esul t of i~)e r; Method
I~f:fcct oflJermanent and Dea.d Band on ;imal1
7 I
t
th
9
Cain
V£llidi fOl~ 011"""
I~etwo:ck
the tho Ceneral Tcrrn:Lnal
Network
for :3ffiall about a
f33,turatton F'aetrn'
Gnt ;:~ollJ --'cion.s
f'jolutiofl of the I~incar:i
model
? Prog:c8lTi DPIi:HT
6
TTl tT'ollLlct~!.o~n
1 1
the
1 q:: funetions
6
L
Lion of tbo6
1!~Differential
on LOE'cl
6 GoveTDDl'
F'urwLi o:nal 6 3 I) Value s of 'I.'
:r
6 '['he
:'3 on Rotor
'J1he
V{or.k on Rotor
6
The Genera.tion of6
He Ck,jn
6. 5
'i:'ransient
G 2
Vol
0t at Pilot
F'unetiom.:
}(O to:c
fi'uneti ons in terms of
'rhe Effect ShtJ.nt Load.s on
on Hotol'
tb
")Note
Zubov
Lo
wit], Vol
TOII
{\I'PB:NDIX
ial
{'PP1%!DJX TIll:l
Genera1
ForTII
j!I!:li'J':nli:NC1')S
'!'
of ;"3I;andard of te Srn(lll
Connection :('01' ~~olutioIJ
fOT
~l
1
?07
\T()clc 1
21
220
W J. fa.
,v.
o.
led
'\Ira.
w
N T
rp
.g n
g
'2~
11.
e
G·enerator Piela. li'lux
Genera1;m' d.-axis armatu:re flux
Generator a;cmature fhu
Generator d-axis arnortisseur flux Generator
Field
Botor
bus
Rated
Hatecl
8Inorbiss6u.r flux
from rotor to
of
)
of set
p®u" turbine Instantaneous
p.u
deviation
unle
of infinite
(
orNormalized p"Ue instantaneous pilot actm).tor
~Per uni1~ d('lvia:tion as indicated on a ze:co-1;o-uni indieator
Normalized p .. u. act.uator
p.u" (leviai:ion in head due
water
Instantaneo'Uf'\ rotor relative to refex'cmce fixed in. stator frame
Phase t;eI'm:i.ncl1
Phase tenrlirk'll cUr':ren1~f'l
d and te:cnrLnal
y Illfin:L vol
k Saturation
Gate for part load
Baae as indicated by
lORd
indicator full load
~l'GN '" 'l'utbine
B.AS1:: Base*'fGN A
D eoefficient
Nordnal load turbine coefficient
D
gen
H
Nominal damping coefficient of
intercon:nected electrical loacl.
Inertia Constant
Moment Inertia
~- 2fT time consiJa:n1;
'I' Inertia Time Constan1;
(
.,.
.,fr'
'1 + ()
Dashpot Helaxation ~.'ime Constant
'l'ernporary droop for a 1 p"Ue
gate hioH
for a 1 p
tion
Pilot valve·
Ga:Ln
~~:ime Com-:d:;~)nt
ma.ch:lnc and.
:x; / I
q
[
CJ
r
]
[
T]
r W]
L
[
]
[
V]
[
AI]
[
.11 IJ
of
gap
subtrarF2 .. Len.t reactanee
OJ;. lj'ield time constant
F'ielcl resistance
i\mortisseur oircuit reSif,\tancel:; Arrnr:d:;ure cireui t seri8s rCt3is tance
p u" resistarlce balanced transmission
line
p. u~ reactarll~e of transmission
llne
~L'otal line
or
Sb.Uf.tt resisi;i ve load at
rPotal p.u" , ox' twice
shunt
reaetive load at busP.u" resistEUlce of transformer
p. U. :r:eE).ctance of' transformer
Terrnlnal network
Rows
Co182 2
2
6
6
2
1
'I 1
[
PI:]
[A
[
]
[B]
[ dJ
[
]
[PJ
[ GJ
[oj
V(~ctor
Matrix fm:' linear of
CA]
['3. matrixVector of coefficients of
Vector of c:oefficients of
Vecd;or of coefficients of <p
of
in
Zubovmatrix of coe:t'fieients of' second order form [x][ (}][ xT]
Symmetric
matrix ofquadratic form [ ] [
c
J [
xT]Differentia,l Operator Perturbation
C l·l1\pr[,I~ll 1
,['his thesis describes the analY~iis of the dynamic of a hydro electric generating 13et und.or conditions of balanced three phase ope:cation. 'l'he hydTo generating set, or system~under conxideration ba,] been limLted to ~) single synchronous gene:catur, itn control devices a slln.nt 108e1 8t its terminaJ s and a balanced tl-rcee l)hase t:cal1Ennission 1 ioe terminating at an infinite bus. J.iLi.g. 10 'J if, an overall block diagram of
'1'he system as ~;lhown in 1 1 l S a good representation of an isola.ted
povreT' sta.t50n supplying power to a large centraJ s.Y;,tem via a h:Lgh vol taf~e
tran;:lInission line, sj nee the shunt loao at the sending end of the line c~m be used to represent line cha:cging capacitEtYlce as well aB the local load.
In this thesis a general analY:3is of this system "vil1 be produced and
a rneu.ns of reducing this general analysis daVin to any of the common ~lpeciaJ co.so:::, such as a voltage regulated ~')ynchronmls machine connected to an infinite bus, vrlll be providr-;d.
1 • 2 THE: APPROACH TO 'I'HB HI.Ol:jU~\fl
'J'he problem of obtaining information on. the pe.rformEUl.Ce of the generating set for all load.ing conditioIlf3 hDB been approached from two separate but
interrelated a~;pects.
1 Tbe development of improved c1:Lf'ferential equ.ations for the gcnt)1'.'3 gove:cnor and hydra.fJ.lic tm~bine; with the aim of a :cepresentation suitable for the
con.t:col theo:eye
2 1'be stabili ano of the gener"Jting set the
p;en,coTaJ method knovin. an th,," "Second Method of' Liapounov, 11
T'h.e math.ematie;clJ model of the goveJ'nor,~tuJ;binc i~\ based on the
seTT/Nt:
WATE£ ~ESSV/t'G
SYSrE,/Vt
C eNE..eATO,.e
.Lne-rr/O'
e'.I""£Y
C' 0/1 V~ ""~/(;'n
rV~"//V$
Ene"..,?y
Con v.vo",TACE
A!.G<: V.L.ATo;€
TA;:4NS-,;r=o~E..e
t-...,."...,.,. ...
.8A~A/VCe.P
r;4!A.lVs ~/ $,$/<
HI--+-.iI ...
.5/?V'/VT L OAJt'
Y'-.1:..1 A/ E C' k' A...-eCZ,/f/ ~
A4
/'n,,#a./1~e)
ved from ( )
reel for cUli.trol tuclies but it will be sklovrn heTt~in that [3ssumptioI1E.; in the c1e:l'i of
in
tbis
thesist'o:[' 8.11 COTldt
BeCc;lJ)Be there
eyc' accu:racy of governor mo(lel~;
to suitable test
'I'he mathemE,tical
it is clLrected eguations in the form
f. l
rather than a sei; of o:perational p:co
x:-e8u1t
tion
)
or fins'] generator differential equation:,:) are fltlX orLly, iDBtead of in 8.
~lonlC fluxes ancl some Cu.cTents Bfl 1;I.:3e<'1 i n
~L'he machine model :Lncludes
amortisi3eUl' circuits, 9.rmature resistance 'fhe complete lW3.thAlllAtical model of the of such complexity that i t cannot be handled
computers at the l:Lne8rised
~d;ion::; of the
the
ion of
of doubtful aC10Ctel which
of the ff1':)del c1eri ved. in
is unu.su81 in
set of differential
( 1 . 0 "I '\ _ /
in terms of the machine
of some
the
set is nonJ.incar cmd
on t.he or
the: thiB linear
J
1'0
! S seCD:rld due to ZuboV',wJd.ch
Ot
OF CDM
vrhich
th(~
I
1J~M 1
re s triction.
th("~;A
possible to solve
'1
KLltt:) ~ Gill
were
IUM 1620
on [I hinc"
nvtchLnc
th(" fiela
and V'lhile bo.ndle
of the nonlinear set e
i~his to be of
Thus, while nOllline of r,he rl.s~_;~
;:~ tu,(t:L{]~:;, to ·he :cc
Ll
?,1!
JON
i diJi~ed fou
Ird);coduc"i;ion
conside:CDtion tri.c gove:r."nO:CE, ond the
and the
the 1
to
thein
.iUJ __ material on ~jn(J test
in
1 e 6 INI'J'BI, CONSI
1 1
'l'be
of
in 'i
Tn
fau.} hod
tr~ln.sient
'f'he
of control
the main work OIl.
of
(
) a rrurtibr';:r'Whi}e the voI
on inte:ccoymcct;eCl power Vlere first studied j,n America were mad.e in
), artd SI, 'te"l'rl ( J . , .. ~ J11.::1de contrlbutioxlf.l to the of
in incU vidual effects of water
turbine c::ha:CE1.cterif:\tics and interconnection
S11cee ss fu.} to tIle transient
under ault conditions of multi machine pow
of governors 8x!d h:::l.ve been made Aldred and. flhackshaft Th.c 8t.;:,1;e of
at
is known and it is these cont:rol element[; do
te and trl).1]sient of power whole. t in
calculate curves for tr1'lxJ.sient GOfH1Ltioml on m:ultim<';lchine power
or , but at it is not econom:i.cnJ to
includ.e detailed.
oontrol s'1:;u.clies of'
the varicH) s control SlLClt c:ls 'r'(lO+ ]" "'. .J N ()C'll co ~T I:> ('1 ~
7)
• , the II.outhHu.rwitz test ("113)
(1':)),
(6)'I'lle
have the
HlclClIJ .. nAG o.n a
Cl)Jfin~on II 1:[1 oJ'de:!:' to !lnde:t:'c3t~)nd tbH oJx;ration of a
in some
,")c'l;iO[l of' the governors 01.i sucb, 8
When a govern.or acts on an isol"ded prime mDver and load such 8,S an c.LTlsyncbronisml hydro genera.ting set it acts simply i'tS a speed :cegillating
~,1.1.~)'.1~ L . , • . _ ,al.,J, ,-L·.'t~.· ·,r.·)~l·!llc , w . J _ I.. .. r11(~/-p·.r,.'.') ·rr.~,l.,,~.t,; l-.·Ol~a.~C,! • ~., . . . 1.1. ,."I.1, J,. '(-~lP L\. ,,' crJnp L " ) , L > (E'l~n~l~l'ro-L) -'~'.",d,- -'~O~ Q-rec' "'fj,~ "'" ~l'(' v 1 ~
governor::: assurne the Cil1Dl roles of speed and tOJ'qnl'l ree;ulators0
best illustrated by conside'cing a single gellDrating set which is connected to a hypothetical infinite machine runn:ing at consta.nt. frequencyo
//')creQ.f//')9 IV.h .
.spiff? lff?eI Selt/ng
li\OVeT
i
e
tJI.H iG f'o:eced tonolon(j
I t L:~ will 'lOW
:in y!II]
d
)
frOIrl the
Lhat
ef:fect b:cium lOio,d Il'hus the governor has become
f'n:(' the
G()nnect·-:;d",
(;(;(1 HlB .. ebine wi{;h
to
of' (J, power
.'1 v(role th(' fbet th.s.t i t i~~
'OlD.y be cOl1f';irJered as a.lJ.nit the
and so the
to
the dLWJ rolf'!
When n povfer
machine tn
gc)\n~rr]orB :in
~tn con~;jd.e rnean~" thl:J.t th~~ 'w.hole of i its own si
since
the
£1,0 Ire l'no r 5
In
to
settixlg of' sorne
of the ::W"S\;cr<!
But
wben n.ny indiVidual mac.hLne of a 'is eOTlsiderecl pf 1;11econtrols the
the overall conLrolled tb!"; eol1ecti ve
di 1'd:r:ibution of' the l;r,erlf3T'at
eontrol1ec1
the
between the no lOftelal governors
~'hc c011t1'o1 of oveJ'.9.11 one rn'~'c rd.ne or,
t~hc ','(,8.porw i bili lTIt3c:bine
to
manner te) coni;:co], f'rcquency i t :l:,
tIle
can be msae
l[le no 10::,;.<1
C!)~Cr8ct Whr;";n OIle
E18 a 11
to
G8Vof tb.e
I i
f)-f' thi
of' (;h(';
II
in the
nontrol machines so
rated
dealt with
det:D:i.l in referl:lnce (power' foetor of will 'be; shifted in. in exci t"tion EUId in the le direction 17oJ.
in power
the
P + j
v
i13 8
:in power
'1 @ .An indud;i vo
a power
A
puwer
it
in 8. network
whLch Cl)rrent throv
of this (lcmventhm
"l,o a
1;1:'01
deereasi3 in. exe.ite:c
'I/,e vars
the e of to
aT G()wluctor
excitation
knoYvn dj fficlJI
The CBXl be
tr<J.I1srnission line with i line can
JHuch
the
reactive 1'13 of .normal inductive load~ ThU.i3 thepmve:c with lower excita.tion 'l'he combination of
excitation a medhun will re,;\ulL
rotor wlL1.ch in 13 reduced stab:ili
'T'he of the of underexcited of
vol '[.or:::: h::Js recleved. o. de;:)] .. of attention in
(9)
.
and Jt ",till acontinue to rise.
rrtle
of' a as
excited anCi this
1 ~
Pr6blems in the transient
decade before the eot 0:[' control
came tb.i s cLee adf)
were J:18J1dlec1
po\<;rex'
co:Llective 'l'he tcadi
of some OJ~ all of the
the
thiB thesi;:; is sui t.ible for unde}~~ reeeives clt ten,tiOl1
of power
ana
to "be known under
a short circuit
'Phe Fiest the
) > Jiovrever
differential
'l'hi is II stabil in in definj.
j
of
1;io(1 of stf:ibili :inthe seeond s is in,solu.b1e
the
;tin the II
diffe:centiaJ. fOT sirruJIDtion "in the InD.C b:1ne "
(-l) (16) ( fo:crnatiorJ
for mu.ltimachine fox),
(
in tbe indu it woul(18.ppear that before
But
control thex'6 no diG tinction bel/Heen !1
stal)j l:i stclbLl:Lty " Both terms refer to
mathematical
condl. tion of II in definition 2 of section
'rhe corrcrol s t1J.dies of Concordia.
(6)
(
) AId.red and(
tan(18)
ton(1
been concernecl In this the
but
line
ntion
11(~nco
it
II II
to
i of 'I;he Jines
Problems power were rneaJts
}:Tt!'CO(~8Siorl W:1.S
'I'he common ut3e of'hi
g;ovex·t1.0r have now m;>,de :L t t.o conf:l;iJ:le:c pov/er tra.!1sient
in their control
e.ilTIl).lation mnl timachine power been 3.chi
ar.ld several indirect control e
to
indtviduaJ. in the simula l~ion. of powerlimited. of computers wliicn are
c1vailable.
'['hi thesi tb.e
tho '.1. Zubov to element of
IN'l'HODfSC'J:ION
'rhe basic noulinea.),,:, oontrol 8.:ce
de:f:'initie>ns and which are necessary for discussion of
method of the r::rtatemtmts of
defied tions and a statement of the Zubov and
and
to
studjes~The conventional control based on
methods
deal with
b.igh or(ler linear differentialcontra.st nonlinear
control
deals with sets ofdifferential
ca.rl 'be
[
]
[ fthat
the nut!iber [ ] an(l [
by
de
of the fornl
.
.
@ ,
•
•.,
in
matrix
form ast)]
t;hia thesis the
t)
t)
t)
( '1 )
used
f[' bll[J
in
tif.;,Iteci eorrtrol
Ji'or the purpose of'
[
fo:rm. for som"e
and
the
equa't;iO(lS( x
J
--
[Al[
1
as
J
1- ,r
r(
J
(2" )
that (201) beeOlYlBS
in a more
pr:l.rts from the
r
A1
is a sqUEL1'e rr!4'Jtrix of com::tant 8.ndthe
t'' i
now
desoribed
8.l,\(1
terms of seeond and
the;
02.,2)
[xl
order.
become
[AJ [x]
i t is a
straightforward
lineal"
(
to order
linea.r fliffer'en:!;i,al equation with constant coefficierd;s in the form ( the r<'lmainder of this
[fA ]
will beto
ffi8EUl thematrix (
linear a:od nonlinear control
terms of the
planelt where the magnitude of a variable isand its time derivative is plotted
on
theother
axir:l Fora linear
or nonlinear system the
caube extended toa the eqlJ.ations (2.L,~) in the form
(
time
of the form of the
:HoweveI'
)
we deal not withone
the x.
lspace but ea.c:h
term this n-8p8.ce the l!~:ta.te }1'urther clisous::.don of the and state space is
) and
that
Each
Hovtever we note one
of the n-dimensional state or sp ac f) assoeiatect
an n-dimensional determines a state of of that
2.
When a is released from 8.
(Xi (0)
j)in s tate space i t vdJ.l move a8 by (2,,2) The
of
) )
the
at successive instants after release will follow a curve in stat~; space which is described. by the co-ordinates (xi(t ) ,
(t) ) Sttch a curve in :3tate spl'l.c:e is called a
An
pass through any
(10 not have a
of trajectories is that
of a state space" Any where
with the result that more than one
o e ,
2)
would have to pass through is a in state Rpace.
Such a
We must now define in the
the behaviour of a state where
to an
of the
of d,ynamical B.nalysis "mel disoussion. when its state of is
It mllst be noted. that the behaviollJ'." a
released from a
that the stat€"} variables a:1:'e not
from an.
when
i t(2. )
on ( ).
that CO!lcli i;ioH
In
behaviour of the
space it released from different
from
be assumed have <been
such the
the
(
(202)
th(~n beoome[
]
[
-
0
(
~['he (2,,6) ~~<=;:;,
if
there exists for8..>0 cL {) :;. OJ such that the
[ I
[
[
t,
) I
J
<[
e:: ] for t ~r/C
2 /
a
S//4I1/L/TY
def
of
s
2@1a, ~~.'Ib and 2 onto a
for stable unstable and stable
It' the i) includes the of' the state space
to
defirLi titUlS 1 and
It :1ho111d 'be different clEl.sses of
and
Such fA si tua.tion.
I'eeJ~izable i"ltates of a the
are said to
'I'hw'l a
ma;v be different, be stable in the
buJi:; not stable in the
I3hovm in 2" .3
//\/
T,#'E LARCE A/Vb
SrAL7/L BUT /VoT ASY/"1'P;'V/7C
not of
IIfhole fox~
the
If
of theste:ble in then is to
is ensIJ.:cec1 in if aJ.l the
of charaeteris tic have
Houth ~ Hurwitz test p:roves linear
but a
can in B. small
the
st'lmi=·defiai te i'unctions furlctions. These classes of
functions are now defined~
A
v
of sp;;\cethe same
for
[ xJ
\'Ii ttLin and vl::l.nishesLX]
==
For
)
2i.s ve defini te and.
v (
)
= ( 2 2is
fUYl.ction V is nD.l1cd
[
]
Before
function we observe that a
V
(x
1
to the
'rhen
the set of
n
Z
w
n
.z
cOD.sidered 'Inth a
( 6)
:md thedefini
te funct.ion the Ji~ule:J":i.an tlerivative of V withf. ( ~
Now if wi thin some clomain D:~
) V(x
1, @ •
)
is pos ..
definite(ii) is neg. definite
then V(
for the
2 .. 2 ..
5
One of the most
means of and means that fo:cmsthe
1113.sis for theto nonlineEtl' control
methodr~ of this
the
Method of II 'rhis second metJ')oc1the
or more of number of theoremf;'
were
We no'll wi
thou 1;
, the tVIO mostof' these o1;her theorems of aTe
'T'he
thero
for the
of t3table:
there funct;ion
that
I~uleri.an de:civative thethe definition
7
it is evident; sufficientfor of a domain D of'the
that
function l'mmd i.'()l''l'he of theorems of and of
from tbei'J':' result,.~ are too numerous to
)
(
)whioh discuss corl'trol eof the 11,11ethoo,1I
'rID:
ZUBOV lvfi';trJ:"lOD ]j'OH Tffi~ GONSTHUG'l'ION OIil LIAPOUNOV li'UNCTIONHThe second method of
the and the of
pui, it is "t:ll unfort-u.nate charactc:cil3i;ic of
app:roach that met;hods 'bafJed on tbe main theorems are often
on One
of' the second
in
f. ( ]~
f'
It ~LG sbown
cp cP
(Xi'
in 6 of vre novJ
form
( .)
l,t', ~7( 2.
)
n wllf'Jr(; 1;hG . arel
, It are
fTahn (
.
,
formfo:rmc~d
::;1;,"1111e"
a.s:"nJmed. that the; f".
1,
'J' and. so one
L.
the linea.r ternl;,:
ElJ'J.O. Vogt
(1.
18) that the solu.tion function fo~(' the.:( ') 7)
0(;-,0 J'., =-.,ll q(' u ) . l'n" E:~(j
+ OX
n
)
o
x
n
...
) n ){)
x ) i~ a po~;d, ti ve definite OJ,:"
11 t.ive
rl'b.c clo:::ed form SOll1tion of
(2.9)
i:3 often but it :LS pos::abL3 to obtain a sol:u.tion to this equation in the form. of a ~ler:u~['lu
where
sums u of U l\1 +III ie' ,~
the
+
an mth m:,der ser:L8S
(2. 'I 0)
+
+ II Tn
homogeneous
by U slJ.eh.
III
form tb.at
U
tTl
in
the
x..
~l Vi e denote tb.c p:':iJ:·tial
(2.1'1 )
'l'he series solLltion of (2<o~)j is generated, by Lwing equation (2@ '12)
to Corm ,and. then
d
+ f
n
where l'
[
CC)[lSi:3tf3
;j c:dl
o • +
f +
;jth
ar,ld 13180 snown that space where th.e fU,nGtion u valid 8;:: identi ty holdr~e
(0)
)
)
t
t) )
The dorllr:un of
tho function
domain st[~hili of' tb,e
and Vogt shows that
r
i.)
]
o
~u(It sh.oulc1 be noted that this do;:m noi;
any satisfied because
!)ecorne infitute for f'i,n:Lte values of 1ihe
( "I ! \
0
+
]
(20
the doma.in
i'u.rK:tion the
f:l, apouno" fLlTlctJon, is the Tbcormn I [
or
t;})j,,[;l dOlfl21.tn
for
':Che theorems on the domai.n of valiclLty of the (2" 1 0) to the :;:lolJltion of the Zu:bov
is and Vogt@
i8 [lot here taxt the mOBt
tbe
't'hen
fini
w:L the
dorm:lin of'
'J1he
.
-)
calculated and. rmlal1est values
the domatn is bO!lnded.
(
(Zubov
(1-17)
p. (Th.eol'Grn 'I)
'be the minimum value of
the
Therl
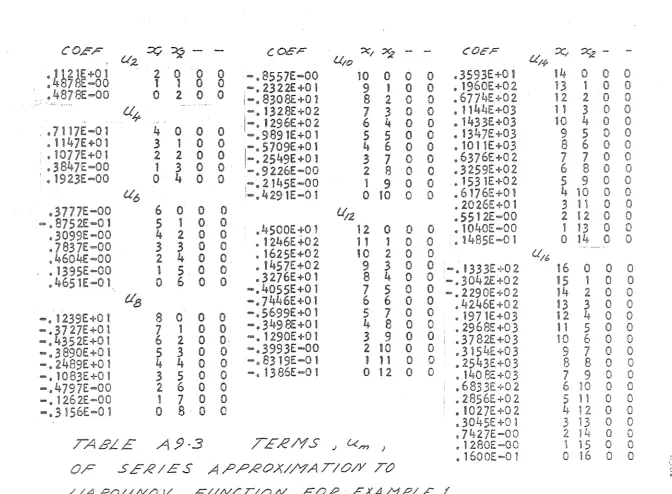
the surfaee Um
of
for
(m)
C:1
on the
hs.nd of' the recrtrrence of seoo:r:ul CJJla rntrl in
'"
y x.~ 11!.J 0 • •
~)
of
ca:"Lctl.lated,
(
Gontl)ined in the
(2 .. -1;;-) B.nd 'l ) are
the
where
y + (;,'"
~•
"h 11 -, m andthe coefficients r
h
are the
coefficients
the ind:i vidual
each of wh,1.oh ha.'3 aof ~the Y:J
c;
VIJ1he lef't hand of (2@ 12) and (2.15) are
,'c~econd. and mth whicl:.l. the
'I'herefore the sollltion of eqrw.
Goeffic forms
the coofficient:')
[B][d]
J
the r" BJ L
in the
(ii) [
y
(iii)
k isk
(n(n
1 )x y
1
unlc!1.own
terms in the (4*~) as
+
2)
combinations
v
v
m(n
+m-1)
(
] is the of coeff'icients = cp ork
1;0 liUbov (ref page 6~) the determinants of the
[
from ( -12) and (20 1 ) are different fromunigae solu,tioDJ;; f'or the coefficients of the u always
m
of the solution of the recurrence
(2",1 ) for a second order There
is:-The
2 eli x'l
2
wruch are, in
1
Therefore
(2
+ (
+
(2
~-1)
with the linear[ J;
[AJ[ ]
(
17)
(x
1l' + L) (b
+
[f(x)]
(
)
fOJ'JllBtionthe
[:s]
MacF'arltwe ( ) haf3 alterrwtiv('l
It that thEl z,e of th~; mt:ttrix
Inl
increase::;\very
as nand m are increased since xmmber crr terms in the 81lBwercal(mlate~ct froIlt ( 19 c1etermin8.tio:n
for '10 x 10 rna:trix while i;he determina.L.i.on
ot~ for a four variable rna.trix
x
often
the second.method
of'result, of to a
.A second 0 rder Gart be in
v
][ x]
(2021 )Ivhere [
G] is
a matrix" For a[ G] is a
definite matrix (
)
..
We now which re~ml t3 :f'roHl
derivative of the
[xTJ[(}J[x]
toa
where [ C
J
form
[ xJ[
T a defirrite matrix@(
H
][ A ] ~[ ]
(
)
(
)
A.
l
of the Ai' of [.II ] is zero. It is not nGCef3SE1J:~y for [ C] or [ G
J
to be positi vo defin:i:te for thi~1 unique solution to exist.when [ C
J
is t1H-': mat,rix [ (}] o..eterminecl as the sOlU:t.i011 of' (2022) i:01 pCH'litive definite if and only if all the of [ .A ] havereal parts"
Under these conclLtions the guad:r:-atic form v [ XII'l [C'
1 [ xl·;
c·,oJ
e"ply·~. : :f' _ , _~ d:.1.:~ ,-,,==:'Cd .. ~,
a Liapounov function for the system ( ), 3Jld f\ince it is positive definite:
with a negative definite derivative over the whole state space the existence of such a
[G]
matrix proves global asymptotie stcibili ty of the linear system[x
l
0:[A
J
[xJ.
rrhe traditional teehnigue for proving t.he stability of linear differentia~1 equa.tions has been the Routh Hurwitz test -which ensures that a real polynomial has roots with negative real parts (~ ..
3).
The use of the Eou.th Hunvi tz, tei~tthe characteristic equation to be rectuced to the form of a polynomial, and while this is always possible the algehrB. frequently becomes impractieaT.
However there are two methods of p:coving thE:) asymptotic stabili of linear cLifferential equations with the form
l x
r 0 ]
~
[.AJ[X]
which do not require the algellraic production of tb.o characteristic equation. The first method is to use Bocher i s F'orml~lae ((
69· ),
p8.ge 61) to determinethe coefficients of tb.e characteristic equation arid then to a}Jply theH.outh Hurwi tz criteria in the usual rnannero Tbis method removes the need
for
algebraic manipulation but i t reqtlires the produ.ction of' the matriees
2 n
[AJ, [AJ , ••
@ • ,[.AJ
@'I'he 8oeo.nc1 metboc1 of ensurinp: that (?®4.) has a stable eqv·i. .. l:Lb:dunJ is to 'l'heCl if
r
t. Gl
.is positive defini te the a.,sYlrrptotic stability of
(2.L})
i~1 p~coved aa in 1\ ' . - «"-; < G · · · . - 0 c" ·f'P.· -' .. -1- .,,' -t-'" J 3 _ , [' C' ] J._.. ' Dcces,_,cu,Y arlu . . _~LL _~ <lc:teD, CO.l1CLl. ,I. on 1. 01 . A _ l.')
definite (51) i:::: tlw.t all its principal minor determixk'3Jd;s have values
>
n(
i3lib:cou tineo described in
2"
Consider
the
( ) for the C8.Be of a second orderThe
r
a1
r
g11
G~'11 218'12 [3,22 g21
g2:)
[g11
2J
r
1 812
)
!
°11
,,]
°2:
g21
g22
1322
NoV! indi viclual equ8.tions
for the
of []
we
si.nce ')
~
1 g11 + + g11 8.11 + g'l ~? 1
1 "":-
g11
8.12 + g'l ~l.2 + 8.12 + &;22
since we can vlr:ite these a8 a matrix
1
J...lut we C8Jl alfJ()wri te the form [ ] [
c] [ ]
in the 2(
equivalence Gan be extended to and so i t can be
that tbe '17) deveLoped from ( 1 )
'rherefc.re
tfollows that
f (
]
(
) i~; i(lprltical to the solution of(
c~ ' ) ). 2 .• 12
[
])
(0 )
'rhus progr'am 1 ) in the ('orrn
2
1 , n
to the ~301ution. of (2 e 2? ) PU
c
'l'he ( 1 ) with (:2022)
of
the
ZUllOV'8.nd to form the means of (
defin:i te the of th'" recurrence e
is vaJ.id; beCBm:lG the
must have the form
former1 by the linear
the
(
R.H.S.
veetor[A ] [
x]
and the s tabili ty of' thi~lbe
in order to
matrix routine for
de fi ni te <p function defini te <p fUnction cen
teness of
[G]
to use a (p f'Lmction which a desired functional
so that a1; least
be considered@ Then the to forrmllate the [ G ] one ar'bitrary
u;:> for the
matrix~ and jj' ] is posi ti ve definite the resl),lts of section 2" can be invokec1 to determine tb,e dom~d.n -of' of each fune
the Zubov
It should be noted that when the
(p
function is only positive semi·~ <lefini te the described by ) must be observe<l whf:mtheorems
we notice from (2 .. 13) and ( 1Lf.) that for the linea.!.'
u _
Hence from (
)
[
J[
] -
Q • ,) dt
(
)
rp
[
J[C][x]
it bas inclicatect K31man
(
tho
to the J:/DU ·1:;11 t.hen
and. Be:ct:cam -I:;
do not of
valid 0
I t front ( ) th.a the Routh
assoei.a.ted with i,he functional
"" / n
J
(
:6 \ J dtt::.::o i;:;;:~i
[
J[l~]since
(2e
) shows thatn
Z However wri
been to find any detailed discm.8sion of the
between the Houth Hurw:i.t~ test and (2@22) than in (
)
in La ~ialle and.r~ef8hEltz ).
(
)
)
It
is nowclear
the tWO ( 22) and the) ha~; two the Houth Hurlvi tz
manual
solution of (
to form the characteristic
program or else while
) (leD in the first of the Zubov
series const:ruct:Lon
While it hafJ been Elhown in this thElt tho Routh Hurwitz
cri terion is assoc:Lated with an measure there
is
choice of the quadra1;ic in this In contrast theassociated. with (2@ 22) under the control
of the user by virtue of (2,,2J
+),
(20
)
and (2.26).i3UM.NIARY
:ccGorcled tl:I.O Zubov
to used fl.S n fnethod control,
location
In stc'lte
if
( iv) 'I'b.c of a index for
':celnerrts Cf1n be
(i)
Obt"'Lin Et set of d::LCferentialin
theform
(2~7)
b;y
Ilbout the equili'brium( 7
:2I.nd express them in ther ® ]
form: x
"" [AJ[x]
) Use the result of section the matrix [ G
J.
if
[G]
is definite the linearised system is asymptotically and as shown Kalman. and Bertram9,
ref'(55)) Jehe
nm.l~linear
is
s'(;able(l,n linearised of the
:t\xe small perturbations.,
Thus
(
Use the recurrence p1'oeeclure with ) and. ( suffioient nuniber of' term,,; of tl:.!6) Use theorems III or TV of sec t:.ion 2@
3
e 2 to'l'hen, wi "chin this
U
m an to tho1 ]]\!~lRODUCfI'ION
II.S recordet),
by Almeras and
work of the e:bove autho:cs hut thif'. tb.osis vtill demonst:cF!.te a f)asic
in the The
r'l()r']]'nn,,"~ _l __ ~1-.Lvt;"'" ... 1, C ()rl •. _-'" eli' ~ tJ..i., 4orl'" _ .-~) l"_"~~,~_ ~ 1"1'" ~ ~'.< Y'<"c'e""l"''''r' ~,v v __ t e~OlYl'" at"-c·!~t:' /",;, .),."I.:J '(; tl'-<-u 1 4.(~ '111 ( t;bc intelltion of
no
model has
to be inclttded power where both and. s!l1aJ.l
loading mLlst be corwiderec1"
Irhe inteni;:i.on of' tbis to governor
which includ.es 8.11 the major nonlineer:itieE. of the wh:ich :l3 still able to be
of' the form
[ J
=f'or control stuClieSe
set of
) 1
Section
3
2 diflcusses thebut
l,u.led in the governor
the gove:cnor moclc;;)l
and section contr::.:iJJs the derivations
DIi:lGUSSION GE' GOVE:'RNING SYS7.'EM CO'WJIUNE:N'l'S
1
we consiclen.' reaction t.urbines i.n
It
haf;l Ii ttle
the
and
where
l}(,l
Y
H
on tho that
lived to have any effect em the response of'
~,
:::
a,llows the tur'bine
turbine
turtJine flow (c f s )
of' water
(Tb/ft
jheac1
(feet)
be based.
the
the
detailed infocmation is ,?nra:Llable from the turbine man,ufacture:CI'I
on the vcfri8tion of'l wi t11 va:riatiol1 in the of a
lIm/ever since our so mmry ef'fecd:;f3 such
on the water and
friction not consider the the
'but we the effec't of variation in T) in the turbine
effects"
.AI though such curves are seld.om used as a basis for turbine
because of
thedifficulties
of' . tbecharac teris tic~~ tUTbines in our :range of' interest form
shown in
1 *fal1B off
mre:e 'wide ranges of t:ion" In 'the tU:I'hlne
fan off
to
wi 1 of
as defined
It can l)e seen that the
the servomotor
ZncreQS'/nY'
C;o/~t:joe/?/rJS
eed
of the turbine iH ba.sed
such
that it nm'.1t be as I t
account for the non]j~nea:dties and first order vaI'iati0l1~1
in turbine "
The water collUlU1 in the preasure of a station has fini te
of veIoel ty of' this colU.mn is obtained at the expense of head V3T'iaticms tbe
since both the fJtruebl'I:'C and the water are elastin any
8udd,en
in the
pressure will be the wt;l,tel'w!:wewhieh will the well knownw8:ve
) 0 {\ more modern ;:;olul:.ion of
(3
?)
has bee n m~l.de byDonelson (
15)
e 'I'hi,~J)9
to
i'OJ"m of the well kOlJVm~tn be slJcce::;~lful in the :resporu:~e
of Et preSi..,ure
( 5).
'I'he,;;e complete solutions of the pre:3Sl1re are essentiaJ, where Dt;anding waves set up reflections of pressure surge:::; in the penstock can EJ,pproe.ch re::.~onaJlce yv:Lth the oDcillation::1 0[' the mech8Id.cal governing
I3Te not neces:~8:ry when euch. a conctLtion is not to occur.
~I'hus, beCaUE)e of the high Vfllod. of of tfl.e prer'3sure ~'ur.!?:e[) in pem3tock,'3, the problem of resonance J~n
penstocks I~'or mO[Ji; cOflve:ntional sta.tion,o;; vvi 1;h reasonably 8110:Ct pcn8todc (less thl3Xt about jO() feet) it :u:; permissible to
the effects of' compressibility in the preSSll"re system anr1 derive ~) lra.n::d:'e:c function based on the :'Lnerti:::l of the water coluIlLn Thifl watel' inertia t:c~:msi'cr flll1ction :u-; wel]~ known, 8.wI one form of i t 1_5
'r
VI d
where ,'\H
(tm)
(
tl1.rbine head v.<3x'iatiorl
gate tion va:riation.
In terms of frequency response tbiD tranp,fer function ilJ an adegu.::d;e repre[lentation of mOBt typical penstock fwst:erlh'3,. except at high frequencies where standing wave effects become a.pparlfmt@ lnoquent ,justification hAS
been provided by Oldenbul'ger
C:5:i)
for u:::in.g(j.
3)
in most stuclie[l instead of lwing a complete soJ:lltion of thep:cemm.:ce including elastic ef':('ect[:;.~L'bus for power stuilies wbere the higb f:ceqLtency ef'fectf.~ a]:'("; f-lUb~;taut:Lal.l.y integrated out by the inertia. of the
., oy vm.l:er ' :Ulert:ta. • , . aeco:ccl"l. " . ng '(:0 , ( -.~ ". '-, _. -.. ... ) ,''' ... l1 .. (~l 'r-," . Leo .I .• n ..• +; v
studies of the
su.ch which can
in the
(
the governor the appears be two
(
device with a. finite inertia.) A source of active
which
Cl'he eiTeci; of the rota:~ionC\l inertL'1 of' the is described
power
ng
the IiInertiaex.e:t'ted at the tu~('bine sba:Ct
eonsists of friction and and of the air
'l\he and in lOt small
in power t;ern studielc~ ar(~ ei theY' vlith the
eoefficiellt~ 'L'he i::1:Lr gap
ire; a concU tions on
8],ld of and
Of course a full cr:msicleration of a full
the
g£lp but until rlOWomi tted from atuc1ies
5
of this 1;h0si8 conf:lid(lI'S the accurateof the air gap in limi tations of tho
used for tlds thesis hHve the execution of Ci.n,y numerical
stlHlies with t'his
It ha.s lmen GOIDJnOn
the
lmwhine to thel~
'e
0,)) +- D ni~ gen
(
d.eviatiol1 :(n
'l'hif3 ir\ the
the most of governor
load
ZCl'O tlleS8 C(clS8S the appropria'ce
c
6'1'
In
for. needed 'becaU1::le only off linecondi tions are cons:Ldered, but the purpose the
and accurate a.ssessment of the instar.Ltaneouf>
gap torque
The universal prc\c t:i co is to
the
:3ervon01;ors wb:Lch t:U~E:l in turn Gontrolledor electric pi.lot aetLlatol'o although it h.as never control the rate of change of
actuator 8.11(1 servovalve has been
of is whether or not the
:tn the derivation of the governor'
of
of the pilot [1C II.e<~d not be i t eOllld e well be
in
::uw
other~p:Llot=,
The
(
)
)
canbt:')
the reason
ca.sc WQu.ld wh:tch l,S
eoncl:udeCl. tha.t the actlv;,tOI' not
between this
Ctetuatol' is two
sleeve self neutrali
as tlJat used
the WoodwardWith this of the
servovalve
will not follow the
but the will be so small as to ·be ThuEl the
actuator / f;crvomotor d.e t ermined
t:he of form
shown
£>MAX
U/VO/<!!/7 If
eecr" yet//'? ~ C;
FIe;
'1'.ho
of actua:t:Ol'" It will be
th1:::
been
found
the G.
discussion t follows tt1;;.l.t reasonHble and.
of the servoV8~ve
.".,rhe:ce z
=-
actua andii'( z) is defined 2t.1:1e raJ.lge constraints on. thE)
and the preaonce of'
huf'f'ers will
'Gl(
.l' z,~
( 6)
of the function
J"(
z,g)
d.escribecl in tletail in~'0 close Lhis f,8C note that ba .. sed OIl
r1.etailed of the Woodward governor
(38)
it isgovernors bV most other m8rlU~
facturers" governors are
to
siIlulate the of governor and so too Garl be treated
the of this ttteBi8e
It :w COIOIaon
arrange t.he inctlcator to )cion of the
servomotor a, fraotion of the stroke from eIoned
to
However at. no 108,('1 the will rlOt beeloseCl and may not be
(
the
(leviation in tlem be 11erivecl subtraction of ir!.d:Lc~a.tor
Cll1(l definitiow>:
'/.'he turbine for rated f:LrH.1 hea.d is rolated to
in t11e :cangc from no load to full loade
in ideal hEwed on th(~ change from no load. to full lOG.d being
ch:3.nge in indicExtcd opening based on the ChEHlgf3 from fnll
clOBed to full opened being 1 p.u.
no load indicated gate position full load ind:iG<:lted gate
'l'GI\j ~ 1 turbine
'rhe interr'elatiorlship of the se qU.ant:Ltie[! is shown in fig.
3.:;
<>I
In this
of section
me charlicel
'{' I
"
or 'I: OJ Wo (;J
All'
"
'-,-~
W
the deftnition of
Ii
therefore there
lSIw
o
V.A.
suhsti
T (JJ
D~ 0
2H w
o
f' our gover{lOr l'he derivation8 of known but
in this the
electrical)
inertia conntB.nt
(
~n becomes0J
o
Now the rotational time
defined asby the
to
(
2 m
(
on
7)
b'Ltt in of
'r
canrn
W
o
whenc:e.
have
I
o
'I'
But
Tw()
is the rated powerper urrLt
.
n
'1' HI
so that we have
2H
the equ.ation of motion
Wo
W
o a
has the dimens:lcms sec -1 or ( 3 .' ga.ve
~~Jj
•
(J
~~
w 0
V 1\0
p",U"
to the r'at",d volt amps in tho
(
)
per lHUt that
I t tbat
NoV! the substitution of (
( 1
C))
(
2H 9
n
V
<:>
T "
-~ n
m
(3
11)of th.c d.Lf'finult:LefJ that carl a:cise 138 8.
of units u~jed tha lH1it
nett in p~u~ of
constant in seconds
in poU. per sec of
n.eglect:3
The is based on the
P
K
H 8n(1 (~'"
K'
G ( 1 )}1'rom 12) caD write
TN
;;;;; K G II 1 )where
'r
:::: ratedN rated
~
raterl
H rated
Now consider a
('I'
\ b + 6
'r)
'I'N( 1 +
di
headw
6N)
position from zeri) at no load to the valu,!,) and head.,.
K (C~
."
6G)( o3
K G
n2
1 )
l~ o
/1" 'I' /\
) (1
H18ke
and above
Now the defirtitions of per un:LI~ variables
h , .. P0U. head va:ciation
:3
,2
We
write ideal baseTbe turbine then becomes
+
Now notice that the .. ~~~.~,"-... ) in the inlwrent
coefficient
cannot be neglected or held constant bees.use
we
~N 'be small and so
it
i.s clea~(' thatcoefficient; must be includecL in the tln:;bine 'l'he tel'm indicates th.at
have
some
T
(
3 2
) is
(
( '1 )
( 16)
varLlb1e
of the turbine wi.thout
'I'his variable damping
not tbat and
vari8b1e
increaBes with incre
to
thatThis term does not
variat:ions t,urLdne and
effe:cts
vH~,:iEJ . .tion
well
f:)Swith
te:r:'lll Dn in h
flow head ik~viation
by ( 16
.~ but the reduction the
fOrTlI would have been rather
D ) r 1
£1' \
beoome
of'
( 1
dQviB.tion we incluJle tha.t the inereased
If
have been nee(:)seary
the
( 1
To e.xpre3s () 17) and 18) in terms of the incticated. tion Vfe first note that G 'is meaf:mrecl f'rom the no load
f:eom the clm~ed 'Jlhe restt.lt at' which is show.n
g'
(3
1 )since we wish to use the
of the
indicator in
of
(
)
H!U.st
1 ) and
11)
)
+
(
)
It be claimed that ( 21) and ( 22)
a reasoneiblE;
atioX1 on
the
of linear'account for the
and
acourate enough for electric: power
studiesoD
"
3
;;;; TGN
(g
+2
follows
~
D*n
We conside:r a simple
of
II aXldcross section
at V under ratccl 's second
g
>tAHA
where ¥
of water
g
acceleration
by the rated veloci ty and h(~a,d
g
d
h
there :l.S
)
dis~
(
)
(1
+the <l:ee not mathematical
for t.he COIlJli tions vJh;Lchbhe
the exiEltenc:e value
of order terms in
)to
we lineari('lG
(3.
) toAV
V g
1 'h
"2
be
the veloc:itieG
small '['hus
(j.27) 1;hen
eldswhere to of of be rated '1' VI dh
IN
gIl hto the time for the from
head., l"or L, and with
J. a :.eest pres~~ure rated system we
For the case of a preasure of exaot
but a suita:ble
Note
(
) since based on abased, on from
(
)
watcx' column from intake
a+ .,'
full
by themade up of a numbel' of' each
3
)
sectiOl)' t:rH~
the form ( )
no't; g n
zel"O
s :i.::~ basecl used
:is a
of the
link between
the lower the
of:' the be wi
of' the servovo_lvf:l
'1'he lever ratios ::;hm'm in the been chosen as combiflation the !y:!qui:ced :cel:'Hl1
t.
Differentthe
result in (Efferent relating lever ratiosbui'.would
11'1113 e, y and
n
°t
y(
)
'I'ben") a:ce also the equations
e
f z
whence z e
(
)
n y
(
t
Next
definr:; temporaxy droop limd droop 8S th.e valuesto maintain wh.en g ~ 1 @
in t~he valu,e of
f:rom the corlstraint he loeked
K I
}t
.£I/s~/qc<!:P'1
(/r.{t)
=
Q~-SC'//ENA
P/A
Next K
substi
or
'l'hus
y, and SJ.,Ilce y
temporary
o
thai;n
g
foY'
o
1
)
contributed the feedbac.k
trte
is
the value ofNow let tbe relax so that the
and let K take a non zero v3~ue"
K
~[lhe is the
there the
- · - - K
K
t
It HI here tha.'t, the
1 p.u" :in
Now consider the J00:r the
'I'
Then
values 0
in
(3
)
wrlich we call 0 •
p
Op are defined rlcrl; for :in indicated
for
k
1'heref'ore from t.hree eql)
']'
:v
so
rc (')
1 +r
) g
)
NoV! di1:'ferent:Late ( 1+1) w. t. time
1 +
6
a:nd substitute ( 1 ..
5)
toy between this
)
s the governor1
•
n
(1
.
ge :::
(
)
~rhe governor of the servo~
va.Lve
equation ( 6)g __
[11 (g,z)
One6)
is thatfor smftll
where the vcloci
and lLmits arc noteneountereCi.
C~ (
)
(
the governor model
3mr).11 condi tions. When the studies
Ge ( .11'S)
It ll111st be remembe:eed that the levex' ratios used. in the s of the
to the schematic where ELll the
or per the actual construction the levers
the schematic may have different or
not even 'be levers at al]~~ could be cams or the
well lcnown English Eaectric governor or circu,its the eleci;:t'o~ governors"
occur in the same ratios appea,r in
may not but the comlJined result of
both alld lever ratios vJi11 result in
the
schema'hie of although the
1+ or in a direct 'rhus it C8Xl be seen that of the actuator may be small in te:cms of
um
ts it is neither small nor in the based upon no:rmalizedTt
is to consider the effect ofthe actua.tor has infjnite and negligible
The condition for infinite pilot actuator gain is z ::::
o.
( :,,, ) in the new form°t
.n y
1 g
aXld a11bst:i:\;ution inl;o
(3
) giveEl!'lb ove which
that
( ) f its
,= fj'
r
(
~')
o
tc1efinc8 the
hi
o
th
and gl
Subs1:i
wh,ich if1
)
'I'(
(
0 ) ~ 'if
P'
to
use~3 the
in loael be
~l'GN
these into (
)
e
n n
the
gOV'I;;:rnorit
can be observed(
)
"
('i
°
P'<:'
0 ) ~
roO ( '1
for
1 p .. Uog I of' thi~~ thesis"
Then
.
n + n
of
that
)
tbe
)
lJOf)
)
thai;
i l l load and, that
reference
))
a direct
'l'h .. e
condit.ion:;; If terJi; :cesults are a;vailc;J,le the val:lw
by
the
of the indica'l;o:c 3i'te!~(U:;"(.urbances about gi'V'Eln equilibrivm lo"tding
in the ~J~bsence of test data. the vcllue of Base call be cD,Tcul[xted from the fox"nrula
Ba.se N.I •• indj~cai;ion +- ( ':J())
tb,e 'I'G.N*Ba.i3e appearr': :Ln the fin£:tl -Glll"bine equation
all COlI!:pu.terprogr8Jfla u~{e the nl.odif'ied pa:rameter, BAtm:, defined 'by
~L'GN >I< Base
It follows that
indication) + p.u" eqllilibrium load"
c~.
)
~rhe results of :,lecticm constitute a governing model.
Ine:rtia .11
ter h
~:'urbine D*n
IJ1nrbirle D
Governor
E'
(g,
z)
'1 ]}\['I'HODUC'I'ION
In t})is eha.pter the gover'ning moo.el developed in chapte:c j i:') ai.~'JCUSE!ed B.nd eva.luated. by reference to a class of step respon,'3e tests B.nd model flimu1ation of these tests~
~Cbe lJlOi'3t important question regarding the usefLJ,lne~:s of the governing
model wa}';: the matter of the deterllLination of certain pa:r'ameters, and a ser:ies of tests I'laS performed to p:r:'ovide a ba[lif3 fo:!:' the inve:::l'tigation of this
question" Since any testing technique in power system engineering must involve an absolu.te assurance that the contirmi ty of supply aXlc1 immediate availability of machinery will not be af'fected this chapter does not separate theoretie2.1 and practical. consi(J,eration:::;.
Cbronological1y the eX}lerimenta1 results l;;iven at the end of this cha:pter were obtained first 0.110. the analytical studio::;. of secttons L1
-.4
mld. 1+. 6 were made to explaj.n anomalous results. However the chapi:.er isdeveloped on the basis of the correct technique ·'i'ihich vms produced all a result of the explana.tion of the an.om,s1lies 0
[I. 2gXPEHI}VIEN~'l\L FNJiLUATION OJ!' ~L'1J1~ MOD)1;L
~'he ultimate proof of any engineering model is the complete of calculated and test results for all rCEJ.lizablc combinatiorm of circumstances" 'l'bLw complete proof' of the governing model would, ~requ.ire a range of tests cove:cing all possible operating concliticms of a hydro set, including some condi tions involving imrtability@ It is est3enl;iaJ" however, tbr! .. t; te;:d:.s on an operational power system be restricted to conditions v,hLcb do not affect
the
security ofhave
t
tlle that.while load do
(;mto the their exccu.tion
~'be off tes ts 8.1:"e rna~ae lilni
g;overno:c error in the ve.,ri;iblcB n,
line
In
the load teststhe
the to produce 1ni tia]. error in the
conoition in both tiests thbt of the no load
ngwi Base =:
The fao1; that test d<>.ta Gould
for
one value of' ab
wld.le on
13ase :is limi ta.tion of the work 1x'.cor(ted in this but
the exeGut:ton of on-load tests wew oonsidered to be the scope
of the between the Emo the N • .z.~~. D.
'1'he methorl of eval'Ll.at::i.on of the moclel is to corrrp1::1re the measured
response from the small ",mel load ection tests vvl th the trar~sients
vue".',,"'U by model simulation of these tests.
If
the
of the
set and governor were knOl'ln thi direct
check on the of the lIk'lde in the dertv.f;ltion of the modele HOVlever not all of the governors CDJl be deduced from the
data of a the
of the pilot~a(Jtuator/servovalve and the dl'l1nping coeffici.ent
Dnorn cannot; be determined. ~'herefore values for these
mUfd; be trial and erI'or to model s:i .. lTIula.tions whioh
best
to
the testThis of the two mDdel :recluces
the tmt f:lince
sarne values of'
to
rpWQ other the and
Go:rJfJ"tant flUJ.s'C be determined test to dete:r:m:Lne
t:he exeetltion of reco:cded :in no
this
is determined, 'by aof
Vlhen IS rnethod for' used wi thout mocllfic8,tion i t was found that no could be obtained between sinulation and
test
This lead to the of error in the method ofnn",,,v, which is in the next section~
1
L. M. Hovey, (52), ( ) has d,escribed a tes 1; and c:alcula. tion to the
value the
the
a correction to
for 1 p.n.
1\)1:' a '1 p. u.
the
WE; consici.er
Consi,der now governor
As
locked
so that ( LI)) becomes
(\
(z
Kg)n ~ +
and to
~ (0)) g
(
Novi 's '\;eI31; to d.etennine
of
test
the
governor" s method of
a.efirled i l l this
lood, but :in the the initial d.etermination of the
for the condition of
section 3
h
there is.v
°t
g)
,
when z 0we
~cespOllse on
(
)
of of a
insta.ntllneous value
g s rnethotl o:f G£1J based on
three
(
)
dev:i.a.tion in needed to(c) In the closed dashpot test the effect of' water' inex'tia. to
the
deV:LEttiOl1 from i tS.Llyi.of the
to
(
)
where
p;a.tewith
(
readi ng of
at
0:(' :('i:(,8tIt became
simulated
from to obtain bet,ween test and
response tntnsient::1 thai;
t\
determinedthan
true value of 0t@The
errot'G were eonsig thaI),of and so not 'Lb.e
r:.ource of' the Neither is
(b)
s.incemagni
reduce the value
In in
12 deyjat:ion
COflBtarrt of
metbod
1"01'
that
(l,IJI 1;
:in the assumed
consideration of
(
t]:le case of
reCTJ
te~ems
cond:t tions and we
the turbine
J\ll.l where B
is m8.de
.h
(
)
then, theWEl.ter inertia e:ff'eet in the t:ruc no load. te[d. co.ndition
mUCfl amaLler :vL is in full load corlditi on considered
and tbe
ftY'st l.nvD]id~
frorn