Basu, Amlan and Mohanty, Sumit and Sharma, Rohit (2016) Introduction
of fractional elements for improvising the performance of PID controller
for heating furnace using AMIGO tuning technique. Perspectives in
Science, 8. pp. 323-326. ISSN 2213-0209 ,
http://dx.doi.org/10.1016/j.pisc.2016.04.065
This version is available at
https://strathprints.strath.ac.uk/63043/
Strathprints
is designed to allow users to access the research output of the University of
Strathclyde. Unless otherwise explicitly stated on the manuscript, Copyright © and Moral Rights
for the papers on this site are retained by the individual authors and/or other copyright owners.
Please check the manuscript for details of any other licences that may have been applied. You
may not engage in further distribution of the material for any profitmaking activities or any
commercial gain. You may freely distribute both the url (
https://strathprints.strath.ac.uk/
) and the
content of this paper for research or private study, educational, or not-for-profit purposes without
prior permission or charge.
Any correspondence concerning this service should be sent to the Strathprints administrator:
[email protected]
The Strathprints institutional repository (https://strathprints.strath.ac.uk) is a digital archive of University of Strathclyde research outputs. It has been developed to disseminate open access research outputs, expose data about those outputs, and enable the
Available online atwww.sciencedirect.com
ScienceDirect
j ou rn a l h o m e p a g e :w w w . e l s e v i e r . c o m / p i s c
Introduction
of
fractional
elements
for
improvising
the
performance
of
PID
controller
for
heating
furnace
using
AMIGO
tuning
technique
夽
Amlan
Basu
∗,
Sumit
Mohanty
1,
Rohit
Sharma
2ITMUniversity,Gwalior,MadhyaPradesh,India
Received5February2016;accepted10April2016
Availableonline 27April2016
KEYWORDS Nelder-Mead; Astrom-Hagglund; Grunwald-Letnikov; IOM; FOM
Summary Thepaperdemonstratesaboutmeliorationofintegerorderandfractionalorder modelofheatingfurnace.Bothmodelsarebeingplacedinclosedloopalongwiththe propor-tionalintegralderivative(PID)controllerandfractionalorderproportionalintegralderivative (FOPID)controllersothatthevarioustimedomainperformancecharacteristicsoftheheating furnacecanbemeliorated.Thetuningparameters(Kp,KiandKd)ofthecontrollershasbeen foundusingtheAstrom-Hagglundtuningtechniqueandthediffer-integrals(and)arefound usingtheNelder-Meadoptimisationtechnique.
©2016PublishedbyElsevierGmbH.ThisisanopenaccessarticleundertheCCBY-NC-NDlicense (http://creativecommons.org/licenses/by-nc-nd/4.0/).
Introduction
In mathematical modelling, an understanding is made of
those feelings into the vernacular of science (Lawson
夽 ThisarticlebelongstothespecialissueonEngineeringand
Mate-rialSciences.
∗Correspondingauthor.Tel.:+919981135396.
E-mailaddresses:[email protected](A.Basu),
[email protected](S.Mohanty),
[email protected](R.Sharma).
1 Tel.:+918959763079. 2 Tel.:+918269991055.
and Marion, 2008). Heating furnace is a mechanical gad-get that is used to warm distinctive substances at the
required temperature. There are bunches of
parame-ters that are not up to the imprint in the warming
heater like overshoot, steady state error and settling time. The controllers are designed and tuned utilising diverse tuning methods and streamlining systems. Tuning methods are the techniques for achieving the different tuning parameters of the controllers. Optimising proce-duresare additionally the same yet they likewisedeliver the estimations of two additional parameters called the differ-integrals which assume an essential part in the designing of the controller of fractional order controller (Figs.1and2).
http://dx.doi.org/10.1016/j.pisc.2016.04.065
2213-0209/©2016PublishedbyElsevierGmbH.ThisisanopenaccessarticleundertheCCBY-NC-NDlicense(http://creativecommons. org/licenses/by-nc-nd/4.0/).
324 A.Basuetal.
Figure1 StepresponseoftheheatingfurnaceEq.(11).
IOPID
and
FOPID
controller
IOPID controlleris mathematically defined as(Shahri and Balochian,2012), u(t)=Kpe(t)+Ki t 0 e() d+Kd de dt (1)
where, Kp is the gain of proportionality, Ki is the gain of
Integral,KdisthegainofDerivative,eistheError,tsignifies
theinstantaneoustimeandisthevariableofintegration. OnperformingtheLaplacetransformoftheEq.(1)whichis thePIDcontrollerequationis,
LI(s)=Kp+
Ki
s +Kds (2)
Numerically, the FOPID controller can be defined as
(RastogiandTiwari,2013), u(t)=KPe(t)+KiD
−
t e(t)+KdD
te(t) (3) OnperformingtheLaplace transformoftheEq.(3)we get(ShahriandBalochian,2012),
Lf(s)=Kp+
Ki
s+Kds
(4) Where,Kp is the gain of proportionality, Ki is the gain of
Integral,Kd isthe gainof Derivative and and arethe
differential-integral’sorderforFOPIDcontroller.
Astrom-Hagglund
or
AMIGO
tuning
technique
The other name for this tuning method is AMIGO which
stands for approximate M-constrained integral gain opti-misation method for tuning. The tuningprocedure of the AMIGOisasfollows(AstromandHagglund,1995),
Kp= 1 K 0.2+0.45T L (5) Ki= 0.4L+0.8T L+0.1T L (6) Kd= 0.5LT 0.3L+T (7)
Nelder-Mead
optimisation
technique
The different operations in Nelder-Mead optimisation
methodare(Wright,2012),Takingafunctionf(x),x ∈ Rn
which is to beminimised in which thecurrent pointsare
x1, x2...xn+1. (i). Order: On the basis of valuesat the
vertices,f(x1)≤f(x2)≤...≤f(xn+1).(ii).Calculate
thecentroidofallpoints(x0)exceptxn+1.(iii).Reflection:
Calculatexr=x0+˛(x0−xn+1).Ifthe reflectedpoint is not
betterthan thebestandisbetterthan thesecond worst, that is, f(x1)≤f(xr)<f(xn). After this by putting back the
worstpointxn+1withreflectedpointxrtogetanewsimplex
andgotothefirststep.(iv).Expansion:Ifwehavethebest reflected part then f(xr)<f(x1), then solve the expanded
point xe=x0+␥(x0-xn+1). Ifthe reflected point is not
bet-terthanexpanded point,thatis,[f(xe)<f(xr)]theneither
by replacingthe mostawful point xn+1 by expanded point
xe toget newsimplex andthen go tothefirst stepor by
replacingthemostawfulpointxn+1byreflectedpointxrto
acquireorgetanewsimplexandthengobacktothefirst step.Elseifthereflectedpointisnotwellagainthan sub-sequentworstthenmovetothefifthstep.(v).Contraction: Herewe know thatf(xr)≥f(xn), contractedpointis tobe
calculatedxc=x0+(x0-xn+1),iff(xc)<f(xn+1)thatisthe
con-tracted pointis betterthan themost awfulpoint then by replacingthe most awfulpoint xn+1 withcontracted point
xc toachieve a new simplex and then go to first stepor
proceedtosixthstep.(vi). Reduction:reinstatethe point withxi=x1+(xi-x1)foralli ∈ {2,...,n+1},thengoto
thefirststep.
Table1 Outputparametervalues.
PID+IOM FOPID+IOM PID+FOM FOPID+FOM
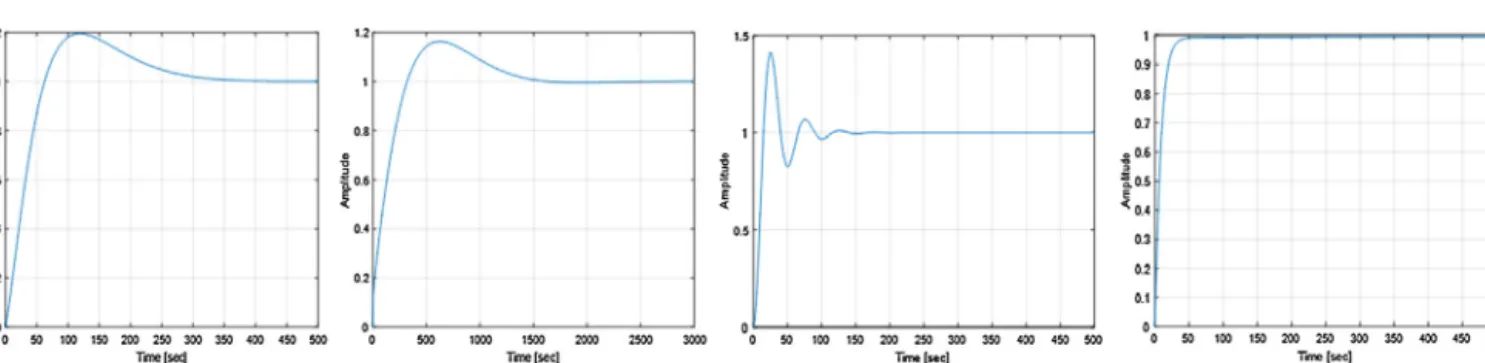
Overshoot(%) 19.5 41 16.3 0
Settlingtime(sec.) 435 171.7 2345 133
Results
Foranyphysicalsystem,thetotalforceisequaltothe sum-mationof individualforcesexertedbymass(m),damping (b) and spring (k) element.Mathematically, we can state thesameas,
F=ma+bv+kx (8)
In the Eq.(8) acceleration is signifiedasa, velocityis signifiedasvanddisplacementissignifiedasx.Therefore, thedifferentialequationofEq.(8)is,
F=md 2 x dt2 +b dx dt+kx (9)
Note:Fordesigninganetwork-basedPID,theabove equa-tion or model is a rough process behaviour description. Therefore,thedifferentialequationoftheheatingfurnace using the aboveequation becomes (Zhao etal., 2005,Vic Dannon,2009), F=73043d 2 x dt2 +4893 dx dt +1.93x (10)
TheLaplacetransferfunctionofEq.(10)isgivenas(Maiti andKonar,2008),
GI(s)= 1
73043s2+4893s+1.93 (11)
InEq.(20)‘s’istheLaplaceoperator.TheFOPDTmodel ofEq.(12)is,
GIOM-FOPDT(s)=
0.518133 1+2520.04se
−15.2189 (12)
The FOM of the heating furnace is obtained using the Grunwald-Letnikovequationforfractionalcalculuswhichis giveninEq.(13), aD˛ tf(t)=lim 1 (˛)h˛ (t −a) h k=0 (˛+k) (k+1) f(t−kh) (13) Therefore,theFOMofheatingfurnacewhichcomesout tobe(Tepljakovetal.,2011),
GF(s)=
1
14494s1.31+6009.5s0.97+1.69 (14)
Therefore,theFOPDTmodelfortheEq.(14)is, GFOM-FOPDT(s)=
0.404257 1+3440.71se
−66.9314 (15)
The PID controllerequation deduced using the FOPDT
modeloftheIOMis, LI1(s)=144.198+
1.25211
s +1095.28s (16)
The PID controllerequation deduced using the FOPDT
modelofFOMis,
Lf1(s)=57.7181+ 0.127522
s +1920.37s (17) The FOPID controllerequation deduced for the IOM of heatingfurnaceis,
LI2(s)=144.198+1.25211
s0.4876 +1095.28s
0.01011 (18)
The FOPIDcontrollerequationdeduced forthe FOMof heatingfurnaceis,
Lf2(s)=57.7181+ 0.127522
s0.3636 +1920.37s
0.12483 (19)
WhentheEqs.(16)and(17)are,respectively,putinthe closedloopsystemalongwithEq.(11)theoutputsobtained are H1(s)= 1095.3s2+144.2s+1.2521 73043s3+5988.3s2+146.13s+1.2521 (20) H2(s)= 1920.4s2+57.718s+0.12752 14994s2.31+1920.4s2+6009.5s1.97+59.408s+0.12752 (21)
When the Eqs.(18) and (19) are,respectively, put in the closedloopsystemalongwithEq.(14)theoutputsobtained are, H3(s)= 1095.3s0.49771 +144.2s0.4876 +1.2521 73043s2.4876+4893s1.4876+1095.3s0.49771+146.13s0.4876+1.2521 (22) H4(s)= 1920.4s0.48843 +57.718s0.3636 +0.12752 14994s1.6736+6009.5s1.3336+1920.4s0.48843+59.408s0.3636+0.12752 (23)
Discussion
It is clear that the IOM transfer function of heating fur-naceexhibitsverypoorresponsewithasteady-stateerrorof morethan50%.SoaPIDcontrollerisdesignedusingAMIGO tuning technique. But the overshoot of the system then became19.5%where asthesettling became435s. There-fore,Nelder-MeadOptimisationalgorithmwasusedtothis PID tofind the fractional elements & , so that FOPID
326 A.Basuetal. can be designed for the System. But it also exhibited an
overshoot and settling time of 41% & 170s, respectively. Therefore,PID is designed based onthe Fractional Order Modelof Heating FurnaceTransfer function. When AMIGO methodwasappliedtoFOMforthetuningparameters,the finalsystembecamestablewithan exhibitedovershootof 16%,whereasthesettlingtimeincreaseddrasticallyupto 2400s. Therefore to improvise the response Nelder-Mead optimisationalgorithmswasusedtotunethealreadytuned tuning parametersusing AMIGO method and also to opti-mise the differ-integral parameters. It is clear from the stepresponsethatthesystemovershootdecreasedtoazero valuewhereasthesettlingtimewasaround130s(Table1).
Conclusion
Theplotsoftimeresponsecharacteristicsclearedthatthe PID & Fractional order PID designed for the IOM gave a verydisturbedresponse.FOMoffurnacegavecomparatively goodresponsewhileusedwithAMIGO tuningmethod,but itexhibitedahighovershootandalsoasluggishresponse. Astheovershootinfurnacegeneratessuddenhighpressure whichmayendangerthelifeofworkersandproperties,this methodwasavoided.Butwhenfractionalelements ofPID wereoptimisedusingNelder-Meadoptimisation,thesystem exhibitedalmost negligiblerange of overshootand alsoa comparativelylowsettlingtime.Therefore,itcanbe con-cluded that more the fractional elements are introduced moretheresultwillbesmoothandswift.
References
Astrom,K.,Hagglund,T.,1995.PIDControllers:theory,Designand Tuning.TheInstrumentation,SystemsandAutomationSociety (ISA).
Lawson,D.,Marion,G.,2008.AnIntroductiontoMathematical Mod-eling.BioinformaticsandstatisticsScotland.
Maiti, D., Konar, A., 2008. Approximation of a fractional order systembyanintegerordermodelusingparticleswarm optimiza-tiontechnique.In:IEEESponsoredConferenceonComputational Intelligence,ControlAndComputerVisionInRobotics& Automa-tion.
Rastogi, A.,Tiwari, P.,2013. Optimaltuningof fractional order PIDcontrollerforDCmotorspeedcontrolusingparticleswarm optimization.IJSCE3(May(2)).
Shahri,M.E.,Balochian,S.,2012. FractionalPID controllerfor a highperformancedrillingmachine.AMEA2(4),232—235.
Tepljakov,A.,Petlenkov,E.,Belikov, J.,2011,January.FOMCON: fractional-ordermodelingandcontroltoolboxforMATLAB.In: Proc.18thInterntionalMixedDesignofIntegratedCircuitsand Systems(MIXDES)Conference.
VicDannon,H.,2009.Thefundamentaltheoremofthefractional calculus,andtheMeaningofFractionalDerivatives.GaugeInstit. J.5(February(1)).
MargaretH.Wright,Nelder-Meadandtheothersimplexmethod, Documenta Mathematica Extra Volume ISMP, pp: 271-276, 2012.
Zhao,C.,Xue,D.,Chen,Y.,2005,July.AFractionalorderPIDtuning algorithmforaclassoffractionalorderplants.In:Proceedings oftheIEEEInternationalConferenceonMechatronics& Automa-tion,NiagaraFalls,Canada.