ISSN(Online): 2319 - 8753
ISSN (Print) :2347 - 6710
International Journal of Innovative Research in Science,
Engineering and Technology
(An ISO 3297: 2007 Certified Organization) Vol. 4, Issue 2, February 2015
Genetically Optimized Multiple ANFIS Based
Discovery and Optimization of Catalytic
Materials
Virendra Nayak
1,
Y.P. Banjare
2, M. F. Qureshi
3Ph.D. Scholar, Department of Mechanical Engineering, Dr. C.V. Raman University, Bilaspur, India1. Associate Professor, Department of Mechanical Engineering, Govt. Engineering College, Jagdalpur, India2.
Professor, Department of Electrical Engineering, Govt. Polytechnic College, Narayanpur, India3
ABSTRACT: A soft computing technique based on the combination of Multiple Adaptive Neuro-Fuzzy Inference System (M-ANFIS) and a Genetic Algorithm (GA) has been developed for the discovery and optimization of new materials when exploring a high-dimensional space. This technique allows the experimental design in the search of new solid materials with high catalytic performance when exploring simultaneously a large number of variables such as elemental composition, manufacture procedure variables, etc. This integrated architecture (M-ANFIS+GA) allows one to strongly increase the convergence performance when compared with the performance of conventional GAs. It is described how both soft-computing techniques are built to work together. The proposed optimization architecture has been validated using two hypothetical functions, based on the modeled behavior of multi-component catalysts explored in the field of combinatorial catalysis.
The method consists of following stages. First, prior to feature extraction, some preprocessing techniques, Secondly, the six salient feature sets are input into the multiple ANFIS combination with genetic algorithms (GAs) for discovery and optimization of new materials. The proposed method is applied for discovery and optimization of new materials and testing results show that the multiple ANFIS combination can reliably recognize, discover and optimize new materials, which has a better performance compared to the individual GA based on ANFIS.
I. INTRODUCTION
Optimization of a multiple output system, whose function is only approximately known and is represented in tabular form, is modeled and optimized by the combined use of a neuro-fuzzy network and optimization techniques which do not require the explicit representation of the function. Neuro-fuzzy network is useful for learning the approximate original tabular system. However, the results obtained by the neuro-fuzzy network are represented implicitly in the network. The M-ANFIS neuro-fuzzy network, which is an extension of the ANFIS network.the multiple output system and a genetic algorithm is used to optimize the resulting multiple objective decision making problem.
ISSN(Online): 2319 - 8753
ISSN (Print) :2347 - 6710
International Journal of Innovative Research in Science,
Engineering and Technology
(An ISO 3297: 2007 Certified Organization) Vol. 4, Issue 2, February 2015
from HT experimentation (Ortiz etal 2001). A promising novel approach (Khuri etal 1981) is the combination of powerful data-mining tools with high-dimensional optimization algorithms, in such a way that the knowledge extracted from all the previous experimentation can be applied in the design of the new subset of catalysts to be experimentally screened in the next optimization step. In the present work, we described a new optimization procedure employing a combination (hybrid) of a Multiple ANFIS (M-ANFIS) and a genetic algorithm (GA). Hence, the Multiple ANFIS finds the internal relationships between catalyst variables in the data from the screening of the previous generations, and the optimization algorithm (GA) designs the next generation of catalysts to be screened taking into account the knowledge extracted from the Multiple ANFIS model.
Multiple response optimization deals with systems that have more than one response. However, since many practical systems are complicated and highly nonlinear, and thus, linear regression is not suitable, we shall adopt a much more powerful neuro-fuzzy approach, namely, the multiple adaptive neuro-fuzzy inference system (M-ANFIS), to model the system responses. M-ANFIS is a generalization of the neuro-fuzzy system ANFIS (Serraetal 2004) to handle multiple outputs or multiple responses. A neuro-fuzzy system is a nonparametric regression tool, which models the regression relationship nonparametrically without reference to any prespecified functional form, and it is capable of modeling highly nonlinear and approximately known systems. Many approaches have been proposed to solve the multiple response optimization problems. Furthermore, since the functional form of the model is unknown, optimization methods, which require the explicit expression of the functional form cannot be directly applied. In this work, a genetic algorithm (GA) is employed to search the optimal solution on the response surfaces modeled by M-ANFIS. In the next section, the architecture of M-ANFIS and its learning process are summarized. The formulation of the multiple response optimization problems is presented and the genetic algorithm is used to search for the optimal solution. The adaptive neuro-fuzzy inference system (ANFIS) is a hybrid model which combines the ANNs adaptive capability and the fuzzy logic qualitative approach (Ortiz etal 2001). ANFIS harnesses the power of the two paradigms: ANNs and fuzzy logic, and overcomes their own shortcomings simultaneously. Recently the combination of Multiple ANFIS has been intensively studied to overcome the limitations of individual ANFIS and achieve higher performance (Ortiz etal 2001). Multiple ANFIS differing in feature set usually exhibit complementary optimization behavior. Thus, if the optimization results of Multiple ANFIS, which employ the same optimization engine but different input feature sets, are combined by integration techniques to yield the final optimization result, the final performance may be superior to the best performance of a single ANFIS on one feature set (Ames etal 1981). The weighted averaging technique is the simplest and most widely used technique combining Multiple ANFIS, which assigns a nonnegative weight to each individual ANFIS. By optimizing an objective function, the Multiple ANFIS weights can be estimated using various techniques. The weighted averaging technique with GAs is employed to combine the outputs of the six ANFISs and come up with the final optimization results. The proposed method is applied for Discovery and Optimization of Catalytic Materials and a desired result has been obtained adopting the combination of multiple ANFISs via Gas
II. SOFT COMPUTING ALGORITHM-PROPOSED ARCHITECTURE AND IT’S WORKING
In this work, a new optimization architecture based on combination of a M-ANFIS and a genetic algorithm (soft computing technique) will be described, this technique being specially suited for the discovery and optimization of catalytic materials, when exploring a high-dimensional space (Fig.1). In the setting-up process, the optimization variables of the material are defined considering the state of the art. Afterwards, the GA parameters are established. Moreover, an initial set of materials is obtained following a process that guarantees population diversity. This process consists of creating several random generations and carrying out a statistical population study in order to select the most diverse population.
ISSN(Online): 2319 - 8753
ISSN (Print) :2347 - 6710
International Journal of Innovative Research in Science,
Engineering and Technology
(An ISO 3297: 2007 Certified Organization) Vol. 4, Issue 2, February 2015
Fig.1. Structure of the MANFIS-GA algorithm applied to experimental design in catalysis
Fig.2. Structure of the Multiple ANFIS (MANFIS) retraining process
whereas the testing set is employed to compare the stored M-ANFIS and the newly retrained MANFIS, that with the best predicting performance being selected and stored (Fig.2).
The performance of the M-ANFIS, when training data is derived from an experimental optimization process ruled by a genetic algorithm, will be evaluated. Therefore, how to model the experimental data will be studied. The other part of the work deals with the GA. The algorithm structure and operators will be described and its optimization performance
Define Parameters and GA Parameters
Initial Populations
(Random Generation of individuals)
Experimentation
(Fitness evaluation of initial population)
MANFIS Modeling
(Training Parameters)
Convergence Criterion
Experimentation
(Fitness Evaluation) Pre-Screening
(Selection of new generation) Fitness Evaluation
Mutation: new samples by perturbing stochastically
MANFIS fitting (Retraining using previous generation
data) Crossover: new samples by fitness criteria
Stored ANFIS
ANFIS Training ANFIS Selection<MSE Samples Division (Training
and Testing samples)
Newly Retrained ANFIS
ISSN(Online): 2319 - 8753
ISSN (Print) :2347 - 6710
International Journal of Innovative Research in Science,
Engineering and Technology
(An ISO 3297: 2007 Certified Organization) Vol. 4, Issue 2, February 2015
will be evaluated when it is employed with the assistance of an M-ANFIS. The influence of the following factors will be considered in the GA evaluation: mutation, crossover and population size. The most important part of the work is concerned with the hybrid M-ANFIS-GA optimization algorithm. It will be described how both soft computing techniques are built to work together and the influence of the algorithm configuration, and the different algorithm parameters in the final optimization performance, will be evaluated.
The catalyst variables considered in this model are the content (from 0 to 1) of five different elements: V(varilium), Mg(magnesium), Mo(molybdenum), Mn(manganese) and Fe(ferrum). The objective function to be maximized is the propylene yield (Y,%) and is expressed as follows:
Y=S·X (1) Where :
S=66 .xV ·xMg · (1-xV-xMg)+2 · xMo -0.1 · (xMn+xFe)
X=66·xV .xMg · (1-xV-xMg)-0.1 ·xMo+1.5 · (xMn+xFe)
The objectivel function presents three high-activity areas while presenting some periodicity, this behavior being common for heterogeneous catalysts, when varying their composition and synthesis conditions. The objective function is defined as follows:
Y(x1 ,x2, x3, x4, x5)=zi (x1 ,x2)+zj (x2 ,x3) zk (x3,x4, x5) (2)
Where : ∑xi=100 , xi≥0 (xi represents the molar percentage of the catalyst elements)
The optimization of this function is rather complicated and, for instance, for an initial random population of 100 individuals, the best value achieved was about the 71% of the fitness of the global maximum.
III. MULTIPLE ADAPTIVE NEURO-FUZZY INFERENCE SYSTEM
A neuro-fuzzy inference system, or equivalently, a neuro-fuzzy system is a fuzzy inference system which employs neural network learning techniques. Multiple adaptive neuro-fuzzy inference system (M-ANFIS) is an extension of a single-output neuro-fuzzy system, ANFIS, so that multiple outputs can be handled. M-ANFIS (see Fig.2) can be viewed as an aggregation of many independent ANFIS (Jangetal 1993). Every single ANFIS in a M-ANFIS simulates a single response of the following functional relationship:
y = f(x) + є (3)
Where є is a random error with zero mean and constant variance and the independent variables are x=x1,x2 ,..., xP. For a
problem with several outputs or multiple responses, the functional relationship becomes yi = fi(x) + єi i=1,2,….m (4)
Where m responses have been assumed. The network formulated by M-ANFIS can be used to simulate and to optimize this multiple responses problem. The objective of the multiple response optimization is to find a solution x* such that each response will attain a compromise optimum. ANFIS can be considered as a network representation of the Sugeno fuzzy inference system.
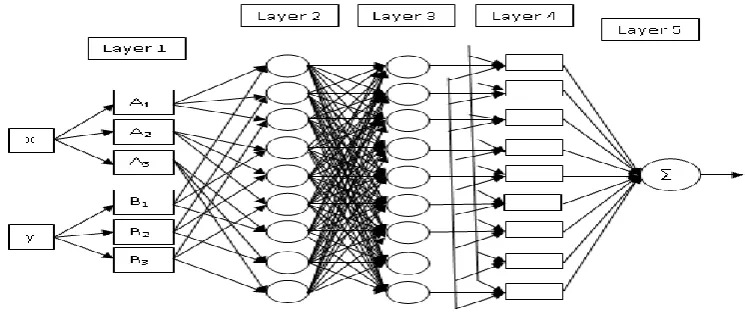
Using the if-then rule format with a two-dimensional input, the architecture of ANFIS network is represented in Fig.3.
ISSN(Online): 2319 - 8753
ISSN (Print) :2347 - 6710
International Journal of Innovative Research in Science,
Engineering and Technology
(An ISO 3297: 2007 Certified Organization) Vol. 4, Issue 2, February 2015
In Fig. 3, there are two subgroups of nodes in Layer 1. The first subgroup includes nodes of Al and B1, which are linked
by x1 and the second subgroup includes nodes of A2 and B2, which are linked by x2. These nodes are equal to the
linguistic variables in the original Sugeno inference system and they serve for the partition of the input space.. Nodes in this layer are adaptive and the output of each node is defined by a membership function on the linguistic value of the input. Usually, Gaussian function is used. For instance, the membership function for Al is defined as
𝜇𝐴 𝑥 = 1
1 + 𝑥 − 𝑐𝑖 𝑎𝑖
2𝑏𝑖 (5)
Where
a
i,
b
i,
c
iare parameters to be learnt. These are the premise parameters. Nodes in Layer 2 are fixed nodes labeled II, which is a conjunction operator. The functions of the nodes in this layer synthesize the information from the previous layer. II is defined as a multiplication of all of its incoming signals. The outputs, wj, j = 1,. . . ,4 represent the firing strength. Thus, w1=µA1(x1) .µA2(x2) (6)w2=µA1(x1) .µB2(x2) (7)
w3=µB1(x1) .µA2(x2) (8)
and w4=µB1(x1) .µB2(x2) (9)
Nodes in Layer 3 labeled N perform the normalization function of the output signals from Layer 2 and this normalization is defined as wj= wj w1+w2+w3+w4 j=1,2,….4 (10)
Each node in Layer 4 is an adaptive node with the node function defined as Cj=wjq1 j=1,2…4 (11)
Where q1is a linear combination of the input variables qj=a 0,j+a 1,j x1+a 2,j x2 (12)
Where a 0,j, a 1,j,and a 2,j are the coefficients of this linear combination and are the consequence parameters. The single node in Layer 5 is a fixed node, which computes the overall output as a summation of all the incoming signals y‟= 4 𝑐𝑗 𝑗 =1 (13)
Where y‟ denotes an estimate of the system response y. A nonlinear mapping between the independent variable x and multiple response yi, i = 1, . . . , m, through M-ANFIS is achieved by minimizing an error measure E, which is defined as E= 𝑚 (𝑦𝑖𝑘− 𝑦′𝑖𝑘)2 𝑖=1 𝑛 𝑘=1 (14)
Where yik is the i th
desired response for the kthobservation, y‟ik is the estimate of the i th
response for the kthobservation, and n is the total number of observations. Since the error measure E is a summation of the squared errors of the m independent ANFIS, the learning of M-ANFIS can be treated as the learning of m independent ANFIS. The learning process of ANFIS consists of the following two parts:
(1) The learning of the premise parameters, which is carried out by a back-propagation algorithm, and (2) The learning of the consequence parameters, which is carried out with least squares approaches.
Optimization with Genetic Algorithm
Genetic algorithm (GA), first proposed by Holland etal 1975, is a derivative-free stochastic optimization approach based on the concept of biological evolutionary processes. GA encodes each point in a solution space into a binary bit string called a chromosome, and each chromosome is evaluated by a fitness function, which corresponds to the objective function of the original problem. Usually, GA keeps a pool of chromosomes at the same time, and these chromosomes can evolve with the operations of selection, crossover, and mutation. After a number of generations, the population will contain, hopefully, chromosomes with better fitness values. Even under the best conditions, only local optimal solution can be expected. The GA procedure includes the following steps.
ISSN(Online): 2319 - 8753
ISSN (Print) :2347 - 6710
International Journal of Innovative Research in Science,
Engineering and Technology
(An ISO 3297: 2007 Certified Organization) Vol. 4, Issue 2, February 2015
x1 x2 … xP
(15) 00101 010110 … 1001
The length of the string depends on the required precision. For example, if the required precision for x1 is three places
after the decimal point and the feasible region for xi is [bl1:, bu1], then the number of bits Nb required to represent x1 is
determined as follows:
2𝑁𝑏−1=<(bu
1-bl1)x103≤2𝑁𝑏-1 (16)
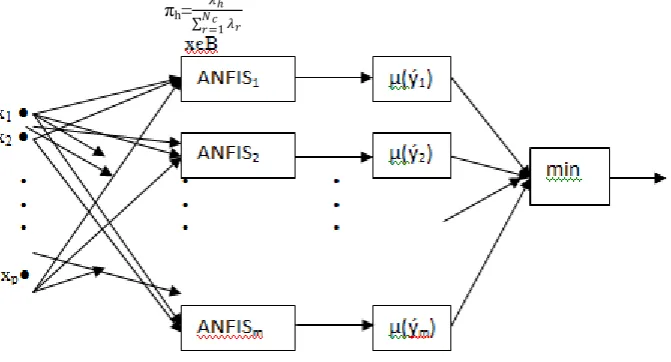
Fitness Evaluation. The next step after the chromosomes are generated is to calculate the fitness values. The chromosomes are decoded back to the solution space and their corresponding objective function values are determined. However, to solve the multiple objective optimization problem, we follow the basic idea of Zimmermann‟s maximin approach and can be rewritten as
maxλ
s.t. λ= min µý𝑖(ý𝑖)
i=1,2,…m (17)
By employing the trained MANFIS network, equation (17) is presented in a network form in Fig.4, and λ can be read directly from the output of this network.
Selection. Selection is carried out based on probability. The purpose is to choose chromosomes from the current generation to produce offspring for the next generation based on probability. Those chromosomes which have higher fitness values will be chosen with higher probabilities. In this study, a roulette wheel approach is adopted to fulfill the selection procedure. The selection probability for each chromosome is set equal to
πh=
𝜆ℎ 𝜆𝑟 𝑁 𝑐 𝑟=1
Fig. 4. M-ANFIS Network representation
where λh is the fitness value of the hth chromosome and Nc is the total number of chromosomes in the current
generation. A cumulative probability for each chromosome is then calculated by Qh= ℎ𝑟=1𝜋ℎ
The selection procedure is operated by randomly generating a number d within [0,l], and if d≤Q1, then select the first
chromosome, otherwise, select the hth chromosome such that Q h-1≤d ≤ Qh. This procedure is replicated Nc times.
ISSN(Online): 2319 - 8753
ISSN (Print) :2347 - 6710
International Journal of Innovative Research in Science,
Engineering and Technology
(An ISO 3297: 2007 Certified Organization) Vol. 4, Issue 2, February 2015
operation of crossover in this study. This method sets a crossover point on the genetic codes randomly and two parent chromosomes are interchanges at this point.
Mutation. The operation of mutation creates a new chromosome which is very different from the current gene pool, therefore, it can provide a new search direction and prevent the population from converging to a local optimum too early. This operation is carried out by flipping bits of the chromosome strings randomly. A bit is chosen to flip if the random number generated for it is less than or equal to a mutation rate. The algorithm repeats with the process of selection, crossover, mutation, and fitness evaluation until no significant improvement can be obtained.
In order to improve the training efficiency and eliminate the possible trapping due to local minima, a hybrid learning algorithm is employed to tune the parameters of the membership functions. It is a combination of the gradient descent approach and least-squares estimate. During the forward pass, the node outputs advance until the output membership function layer, where the consequent parameters are identified by the least squares estimate. The backward pass uses the back propagation gradient descent method to update the premise parameters, based on the error signals that propagate backward.
IV. COMBINING MULTIPLE ANFISS (M-ANFIS) WITH GAS
The idea of combining multiple ANFISs (M-ANFISs) with GAs in a committee is based on the expectation that the committee can outperform its members. The M-ANFIS plus GA combination exhibiting different behavior will provide complementary information each other. When they are combined, performance improvement will be obtained. Thus, diversity between the M-ANFIS plus GA combination is recognized to be one of the desired characteristics required to achieve this improvement (Jangetal 1995). Therefore, if the results of M-ANFIS plus GA combination using different feature sets are fused by integration techniques, the final recognition accuracy may be higher than that of any of the participating M-ANFIS plus GA combination. Of the various integration techniques proposed in the literature, the weighted combination (weighted averaging technique) is the simplest and most frequently used, which is to assign a nonnegative weight to each individual ANFIS. ANFIS was adopted to implement the committee member. The weighted averaging technique was utilized to combine the M-ANFIS plus GA combination based on ANFIS, and the final result is given as follows:
𝑦 𝑛= 6𝑘=1𝑤𝑘𝑦 𝑛,𝑘, 𝑛 = 1,2,3 … … , 𝑁′, 𝑘 = 1,2 … . ,6. (18)
Subject to
𝑤𝑘 6
𝑘=1 = 1
𝑤𝑘 ≥ 0 (19)
where yn and ynk represent the results of the nth sample using the M-ANFIS plus GA combination and the kth single
ANFIS, respectively, wk is the weight associated with the kth single ANFIS, N’ is the number of all samples. Here, the
weights were estimated by using GAs to optimize the fitness function. Real-coded genomes were adopted and a population size of ten individuals was used starting with randomly generated genomes. The maximum number of generations 100 was chosen as the termination criterion for the solution process. Non uniform- mutation function and arithmetic crossover operator were used with the mutation probability of 0.01 and the crossover probability of 0.8, respectively. The fitness function can be defined as
𝑓 = 1
1+𝐸 (20)
Where E is root mean square training errors expressed by the equation 14:
Training of MANFIS Model Using Optimization Data
ISSN(Online): 2319 - 8753
ISSN (Print) :2347 - 6710
International Journal of Innovative Research in Science,
Engineering and Technology
(An ISO 3297: 2007 Certified Organization) Vol. 4, Issue 2, February 2015
Fig.5.Conversion and selectivity predictions for M-ANFIS3trained and Tested with several sets of samples with momentum (η=0.7 and µ=0.7)
Taking into account the MSE and MAE errors for all samples of training data set, the model M-ANFIS3 trained with momentum (η=0.7 and µ=0.7) provided better results. In Fig.5, predictions for conversion and selectivity obtained with the M-ANFIS3 model, trained and tested with all sets are shown. It can be observed that predictions are very close to real values, so a good model of the problem can be obtained, even with a small number of training samples. In the further study, the sensibility of the optimized M-ANFIS model to experimental errors was evaluated. Therefore, the selected topology M-ANFIS3 was trained with 50 samples drawn from function 1 with emulated errors (normalized Gaussian distribution), using different standard deviations (1, 5, 15 and 20). Then, it was tested with 20 samples with same standard deviations of emulated errors (see Fig.5). In Fig.5, the experimental error sensitivity of the M-ANFIS models is shown. We observed that the M-ANFIS, even trained with data with some experimental error, can provide high-quality predictions. Following the same procedure, a suitable M-ANFIS model was found in order to predict the outcome of the objective function 2,
ISSN(Online): 2319 - 8753
ISSN (Print) :2347 - 6710
International Journal of Innovative Research in Science,
Engineering and Technology
(An ISO 3297: 2007 Certified Organization) Vol. 4, Issue 2, February 2015
ISSN(Online): 2319 - 8753
ISSN (Print) :2347 - 6710
International Journal of Innovative Research in Science,
Engineering and Technology
(An ISO 3297: 2007 Certified Organization) Vol. 4, Issue 2, February 2015
The training method consists of training an empty M-ANFIS with all the data provided by the GA from initial until current generation. Therefore, the M-ANFIS would have a general view of the explored space. Regarding the retraining method, each new GA generation is employed to re-train the previous M-ANFIS model. Therefore, the M-ANFIS modifies its weights in order to better adapt itself to the values of the samples of the last generation in each optimization step. Concerning the improved retraining method, the previous M-ANFIS is retrained with the last generation provided by the GA. After that, the prediction performance of the starting ANFIS and the newly fitted M-ANFIS are compared, and the best of both is selected to be used.
The data employed in this study was obtained during the GA optimization of function 2, employing a population size of 50 samples. Each new experimental data derived from the testing of each GA generation is divided into training (80%) and testing (10%) data. The prediction performance of the three different training methods can be seen in Fig.7, where the mean relative errors are plotted for the different GA generations. It can be observed that both training
Fig.7. Influence of the training methodology on the final prediction performance
and improved retraining methods offer similar prediction results, being both interesting for our approach. However, we adopted the improved retraining method in the whole soft computing architecture, since this method prevents the generalizing capacity of the M-ANFIS model from being diminished.
We have studied the suitability of employing M-ANFISs for the modeling and prediction of multi-dimensional data, i.e., the modeling of the two objective functions see eqns.1&2. Different factors involved in the M-ANFIS prediction performance have been studied: M-ANFIS models, training algorithms, number of samples, as well as the sensibility of the optimized M-ANFIS model to experimental errors. This study will be explained in detail, using the first objective function that describes the performance of oxidation catalysts. Output values were conversion (X) and selectivity (S), where yield Y=X·S. The three best combinations of parameters were: η=0.7, µ=0.7; η=0.7, µ=0.4 and η=0.4, µ=0.7. Regarding the M-ANFIS models, those models that offered a lower mean square error (MSE) are indicated in Table 3&4. In Table 3, the mean absolute errors (MAE) and MSE errors for the best ANFIS models are shown. The M-ANFIS1, M-ANFIS2 and M-ANFIS3 models were selected for the further studies.
Table 3. Mean absolute error (MAE) and mean square error (MSE) for best MANFIS modeling objective function 1 MANFIS name Algorithm Parameters
MAE MSE
ISSN(Online): 2319 - 8753
ISSN (Print) :2347 - 6710
International Journal of Innovative Research in Science,
Engineering and Technology
(An ISO 3297: 2007 Certified Organization) Vol. 4, Issue 2, February 2015
Table 4. Mean absolute error (MAE) and mean relative error (MRE) for best M-ANFIS modeling objective function 2 MANFIS name Algorithm Parameters
Yield prediction η µ MAE MRE MANFIS1 0.7 0.7 14.049 0.039 MANFIS2 0.7 0.4 14.052 0.039 MANFIS3 0.4 0.7 15.002 0.045
In Table 4, mean absolute prediction errors of the best-performing trained ANFISs are shown. The aim of the M-ANFIS model in the proposed optimization architecture (Fig.1) is not to provide a very accurate prediction of the experimental performance but provide a qualitative estimation of the catalyst quality. The optimization variables can represent concentrations of the active compounds (catalyst formulation), preparation conditions or reaction conditions. In addition, it is possible to define some rules that guide and restrict the optimization procedure, i.e., the maximum and minimum quantities of each optimization variable, compatibility between elements and/or conditions, the number of elements that can be selected simultaneously, etc. Concretely, each sample or chromosome is formed by zero or more compounds and conditions. The compounds describe the chemical elements (ingredients) including in the formulation of the material. Each compound can have one or more sections. Each section groups together those elements that obey specific characteristics. Moreover, sections are divided into subsections, which contain the elements of the material. Table 5 shows an example of a chromosome showing its hierarchy structure. Conditions are also divided into types, subtypes and final variable values. For both compounds and conditions, it is possible to define different guiding rules in each division level, enabling one to determine the number of elements to be selected from the lower level, and the maximum and minimum values of each element.
ISSN(Online): 2319 - 8753
ISSN (Print) :2347 - 6710
International Journal of Innovative Research in Science,
Engineering and Technology
(An ISO 3297: 2007 Certified Organization) Vol. 4, Issue 2, February 2015
V. CONCLUSIONS
This new optimization architecture for the intelligent discovery of new catalytic materials integratesan M-ANFIS and a genetic algorithm, being the integration/interaction between both very strong. Therefore, this approach is especially appropriate for high dimensional optimization (GA) while keeping in memory (M-ANFIS) the whole history of the search, reducing the experimental screening of statistically poor active materials. This integrated architecture allows one to increase strongly the convergence performance when compared with the performance of conventional genetic algorithms.The genetic algorithms and artificial neural networks are fully integratedfor the design of experiments in the field of combinatorial catalysis, following the concepts already stated in Ortizetal 2001.In this paper, we proposed the combined use of a neuro-fuzzy learning network, namely, the M-ANFIS network, and a derivative free optimization technique, namely, the genetic algorithm, to model and to solve a multiple nonlinear response system. The neuro-fuzzy network replaces the modeling or the usually used regression techniques, which cannot handle complicated nonlinear and approximately known systems. Since the results are implicitly represented by the M-ANFIS and the explicit functional form is unknown, some optimization approaches which does not require the explicit representation of the model must be used. Genetic algorithm is an ideal approach to serve this purpose.
REFERENCES
1. C. Bishop, “Neural Networks for Pattern Recognition”, Oxford Clarendon Press, Oxford, UK, 1966.
2. B. D. Ripley, “Pattern Recognition and Neural Networks”, Cambridge University Press., Cambridge, UK, 1996.
3. J. M. Serra, “Combinatorial Catalysis: Development of New Techniques and Applications of Interest”, Ph.D. Dissertation, (70 – 72) pp 55 – 56, April 2004.
4. S. Valero, E. Argente, V. Botti, J. M. Serra, A. Corma, “Soft Computing Techniques Applied to Catalytic Reactions in: Proceedings CAEPIA 2003”, Vol. 1, pp. 213 – 222, 2003.
5. R. C. Rowe, R. J. Roberts, “Intelligent Software for Product Formulation”, Taylor and Francis Ltd, London, 1998.
6. A. Zell, G. Mamier, M. Vogt, “SNNS– Stuttgart Neural Network Simulator”. User Manual 4.1, University of Stuttgart, Stuttgart, Germany, 1995. 7. J. A. Freeman, D. M. Skapura, “Neural Networks: Algorithms”, Applications and Programming Techniques, Addison-Wesley, Boston, MA, 1992. 8. A. B. Bulsari, “Neural Networks for Chemical Engineers”, Elsevier, Amsterdam, The Netherlands, 1995.
9. F. Herrea, M. Lozano, J. L. Verdegay, “Tackling real-coded genetic algorithm. Operators and tools for behavioural analysis, in: Artificial Intelligence Review”, Kluwer Academic Publishers, Dordrecht, The Netherlands, Vol. 12, pp. 265 – 319,1998.
10. E. Goldberg, “Genetic Algorithms in Search, Optimization and Machine Learning”, Addison-Wesley, Boston, MA, 1989.
11. D. Ortiz, C. Hervas, J. Munoz, “Genetic algorithm with crossover based on confidence interval as an alternative to traditional nonlinear regression methods”, ESANN 2001, Bruges, Belgium, pp. 193 – 198,2001.
12. S. Valero, E. Argente, V. Botti, J. M. Serra, A. Corma, “Soft Computing Techniques Applied to Catalytic Reactions, in: E. Conejo, M. Urretavizcaya, J. L. Perez-de-la-Cruz (Eds.), Current Topics in Artificial Intelligence”, Springer, Heidelberg, Germany, Vol. 3040,pp. 536 – 545. 2004
13. L. Baumes, “Combinatorial Stochastic Iterative Algorithms and High-Throughput Approach: from Discovery to Optimization of Heterogeneous Catalysts”, Ph.D. Dissertation, , (Lyon), pp. 149 – 192, 2004.
14. J.-S.R. Jang, “ANFIS: Adaptive-network-based fuzzy inference system, IEEE Transactions on Systems”, Man and Cybentetics 23 (3), pp 665-684, 1993.
15. G. Derringer and I. Suich, “Simultaneous optimization of several response variables”, Journal of Quality Technology 12,pp 214-219, 1980. 16. C.B. Cheng and ES. Lee, “Applying fuzzy adaptive network in fuzzy regression analysis”, Computers Math. Applic. 38 (2), pp 123-140, 1999. 17. A.I. Khuri and M. Conlon, “Simultaneous optimization of multiple responses represented by polynomial regression functions”, Technometrics 23, pp 363-375, 1981.
18.J.J. Pignatiello, Jr., “Strategies for robust multiresponse quality engineering”, IIE Transactions 25, pp 5-15,1993.
19. A.E. Ames, N. Mattucci, S. MacDonald, G. Szonyi and D.M. Hawkins, “Quality loss functions for optimization across multiple response surfaces”, Journal of Quality Technology 29, pp 339-346,1997.
20. G.G. Vining, “A compromise approach to multiresponse optimization”, Journal of Quality Technology 30 (4), pp 309-313, 1998. 21. R.H. Myers and W.H. Carter, “Response surface techniques for dual response systems”, Technometrics 15 (2), pp 301-317,1973. 22. D. Lin and W. Tu, “Dual response surface optimization”, Journal of Quality Technology 27, pp 34-39, 1995.
23. K.-J. Kim and D. Lin, “Dual response surface optimization: A fuzzy modeling”, approxh, Journal of Quality Technology 30 (l),ppl-10, 1998. 24. H.-J. Zimmermann, “Fuzzy programming and linear programming with several objective functions”, fuzzy Sets and Systems 1,pp 45-55, 1978. 25. Y.-J. Lai and S.I. Chang, “A fuzzy approach for multiresponse optimization: An off-line quality engineering problem”, Fz1z.z~S ets and Systems 63, pp 117-129, 1994.
26. J.-S.R. Jang and C.-T. Sun, “Nemo-fuzzy modeling and control”, Proceedings of the IEEE 83 (3), pp 378-406,1995.
27. T. Takagi and M. Sugeno, “Fuzzy identification of systems and its application to modeling and control”, IEEE „Transactions on Systems, Man, and Cybernetics 15 (l), pp 116-132, 1985.
28. C.B. Cheng and ES. Lee, “Response surface based on fuzzy adaptive network”, International J. Fuz.zy Systems 1, pp 14-24, 1999. 29. J.H. Holland, “Adaptation in Natural and Artificial Systems”, University of Michigan Press, Michigan, 1975.