Fostering Students' Spatial Skills through Practice in
Operating and Programming Robotic Cells
Igor M. Verner1, Sergei Gamer2, Avraham Shtub2
1 Dept. of Education in Technology and Science, Technion – Israel Institute of Technology,
Haifa, Israel
2 Dept. of Industrial Engineering and Management, Technion – Israel Institute of
Technology, Haifa, Israel
[email protected], [email protected], [email protected]
Abstract
This paper presents results of our educational experiments aimed to raise awareness of freshmen engineering and senior high school students on the im-portance of spatial skills and develop strategies for spatial learning through practice of remote operation and programming robot systems in automated manufacturing labs. In the first experiment senior high school students per-formed two assignments: (a) design of a multi-robot system for automatic labe-ling of blocks, and (b) picture puzzle assembly by remotely teleoperating a ro-bot manipulator. Pre-course and post-course paper-and-pencil spatial tests indi-cated considerable improvement in performing cube rotation tasks. An addi-tional indicator of spatial learning was the considerable reduction of the assem-bly completion time with training. In the second experiment undergraduate freshmen students majoring in industrial engineering performed an exercise: to program a robot to assemble a structure consisting of blocks of different types in a virtual robotic environment RoboCell. Responses to the questionnaire con-ducted after the exercise indicated that almost all the students aware on impor-tance of spatial skills for their future profession. Majority of them noted that the exercise effectively presented spatial problems in planning and programming robot systems.
Keywords: robot operation, robot programming, spatial skills, engineering education.
1
Introduction
Engineering practice commonly depends on visual information and relies on the abili-ties of spatial perception, reasoning, and visualization in physical and virtual envi-ronments. Researchers have found that the aptitude of creating spatial representations of objects is critical to success in engineering careers. Cognitive scientists believe that spatial ability can be developed through experience and exercises [1] and that com-puter technology can facilitate effective training spatial skills in different contexts [2]. Spatial instruction was included in undergraduate engineering graphics and CAD courses [3]. As found, this change effected significant improvement in students'
achievements in the course and their spatial reasoning and visualization skills. Similar effects were observed by Hsi, Lynn and Bell [4] who included spatial instruction in an introductory engineering course. The authors recommend fostering spatial skills throughout the engineering curriculum.
Spatial instruction is a strong necessity in robot teleoperation which requires from the operator high level of perceptual and cognitive skills. The experiments of Lathan and Tracey [5] showed that the level of performance in teleoperating the robot through a maze using a single camera significantly correlated with that in performing standard spatial reasoning tests. The experiment of Menchaca-Brandan et al. in the area of space teleoperation [6] indicated that spatial skills, particularly perspective taking and mental rotation, are essential in operating robotic manipulation systems. Research shows that spatial ability is also essential for success in programming. Jones and Burnett [7] found a positive correlation between programming skills of debugging and code navigation and the ability of mental rotation. Their study indicated that stu-dents with higher spatial ability performed better in the information technology course.
There is a great body of literature which characterizes spatial ability as particularly relevant for learning mathematics, science and technology in schools, and as a prere-quisite for related professional education and careers. Wai et al. [8] summarize the findings of their longitudinal study and other research in the following general con-clusions: (1) Spatial ability is a salient predictor of advanced educational and occupa-tional achievements in science, engineering, and mathematics; (2) The role of spatial ability is critical both among learners in general and among intellectually talented individuals; (3) Spatial ability is a significant measure of intellectual giftedness to-gether with mathematical and verbal abilities. As follows from the above discussion, there is a growing understanding of the need for purposeful spatial instruction in en-gineering and pre-enen-gineering programs.
Despite the wide interest in different approaches to training spatial skills, only few studies consider spatial learning in robotic environments. Among them is our previous study [9], in which we considered the use of a programmable robot manipulator as a means for training spatial skills of school students (grades 7-10). A more recent study by Gomer and Pagano [10] dealt with spatial learning through operating mobile ro-bots. This paper presents results of our educational experiments aimed to raise aware-ness of freshmen engineering and senior high school students on the im-portance of spatial skills and develop strategies for spatial learning through practice of remote operation and programming robot systems in automated manufacturing labs.
2
Spatial Reasoning
for
Robot Manipulations
Programming robot movements is based on point-to-point control, where the basic commands are to move the mechanical arm from a present position to the next one and to open or close the gripper. In order to arrange a robot manipulation, the operator has to design the overall trajectory of the robot motion, assign a sequence of interme-diate positions (points) and program a set of point-to-point translations.
Activities in designing and programming robot manipulations involve various types of spatial reasoning. Robot manipulation design includes a number of subtasks, such as rotating an object, which require the operator to design the manipulation as a sequence of primitive mechanical arm movements. A mechanical arm is primitive in comparison with the human arm and hand, and the performance of rotation is quite dissimilar. Robot grippers are usually intended only for simplified grasping operations and not for substituting the human hand in performing sophisticated movements re-quired in skilled craftwork. Therefore, the way of manipulating objects in space by the mechanical arm differs from the human hand operation.
While human locomotion is controlled at the unconscious level, the designer of a robot operation has to use his/her spatial skills to plan robot movements. Every opera-tion has to be designed in a way that is executable by the mechanical arm, without, of course, disturbing the stability of the entire set-up. Designing robot manipulations involves spatial perception, spatial reasoning and visualization skills. Different spatial representations of the robot and the environment are required to perform analysis of robot movements, their visual verification and physical manipulation of objects in the robot workspace. The designer “thinks with a robot,” i.e. uses it as a frame of refer-ence for the performance of spatial operations.
Observing the spatial tasks required for manipulating robot movements led us to the conclusion that programming and operating robot systems can become a meaning-ful learning activity for fostering development of spatial skills. This motivated our experiments discussed in the paper. The goal of the study is to identify spatial skills required for operating and programming multi-robot systems and develop strategies for training the skills.
3
Experimental Environment
We setup an experimental environment for spatial learning using the facilities of the Computer Integrated Manufacturing and Robotics Lab of the Technion Faculty of Industrial Engineering and Management:
A semi-industrial CIM/FMS facility (Figure 1A)
Workstations running CAD tools for graphic design and simulation
A miniature FMS cell
A robot farm which contains five semi-industrial robots that can be operated either individually or as a group (Figure 1B)
AGV area for experiments with mobile robots
A teaching class.Similar laboratories exist in other universities [11] The Laboratory provides hands-on experimentatihands-on in various aspects of design, chands-ontrol and operatihands-on of automated manufacturing cells, while supporting several courses and activities. It also serves as a test bed for research experimentation of faculty and graduate students. From the teaching experience, students have difficulties in programming and operating robot systems to manipulate objects in 3D workspace. A frequent reason of mistakes in
programming robot movements both in on-line and off-line modes is deficiency of spatial imagination.
A. B.
Fig. 1. The CIM and Robotics Laboratory: A. CIM/FMS facility; B. Robot farm.
3.1 An Outreach Project Experiment
Assignments. The experiment included two learning assignments. The first assign-ment was to create a multi-robot system for manufacturing spatial test cubes (STCs) by attaching stickers to sides of cubic parts. The manufacturing system was composed from the appropriate set of the robot farm devices: three robots of different types, a pneumatic feeder, a conveyor belt, and a rotating table (Fig. 2). The programming language used for operating and programming the robots was Advanced Control Lan-guage.
Fig. 2. Multi-Robot Assembly Cell
The second assignment was to assemble a 6-pieces puzzle through remote opera-tion of a 5 DOF robot-manipulator, while getting on-screen visual feedback from cameras positioned around the workspace (Fig. 3). The puzzle pieces were scrambled and placed in a disorderly manner on the table. The operator had to pick up each cube, rotate it to the correct position, and place in the assembly.
Spatial learning follow-up. The outreach experiment was conducted with participa-tion of two senior high school students in the framework of the 2011 Technion Inter-national Youth Summer Research Program SciTech. The students performed the ab-ovementioned assignments, while the follow-up included pre-course and post-course spatial tests, as well as analysis of remote operation performance and students' reflec-tions. The tests were similar and included tasks of two types (to be performed in a given time): 3D rotation of cubes and 2D orientation of flat figures [12]. Results of the tests indicated that both students significantly improved their performance in cube rotation tasks (62% and 38% respectively), while in figure orientation tasks the im-provements were small (5% and 3%).
Fig. 3. Operator's on-screen feedback from the workspace
The tests were similar and included tasks of two types (to be performed in a given time): 3D rotation of cubes and 2D orientation of flat figures [12]. Results of the tests indicated that both students significantly improved their performance in cube rotation tasks (62% and 38% respectively), while in figure orientation tasks the improvements were small (5% and 3%). In the remote operation assignment each of the students performed five trials of assembling the same puzzle, each time with different initial positions of the cubes. The task completion times were measured. As found, the first student significantly improved her performance, reducing the completion time from 41 min to 22 min while results of the second student kept at about the same level of 26-31 min. In the reflection the student mentioned difficulties in remote planning the mechanical arm movements for rotating and maneuvering the puzzle cubes. Possible reasons for the different progress are:
When programming and operating robot manipulations the students extensively practice mental rotations of cubes, while did not have practice with flat figures.
In the first assignment the group work was divided, so that the first student focused on programming spatial manipulations, while the second student dealt mainly with integration of the multi-robot system.Despite the abovementioned differences, the students in the final project report noted that they significantly improved their spatial skills.
3.2 A Freshmen Engineering Course Exercise
Viewing the need to raise awareness of freshmen students on the importance of spatial skills in industrial engineering and to extend their opportunities for spatial learning,
we developed a laboratory exercise "Robot Assembly Planning" and implemented it in the Technion course "Introduction to Industrial Engineering and Systems Integra-tion". The course was delivered in the fall semester 2011.
The students were assigned to program a 5 DOF robot to assemble a structure con-sisting of blocks of three types: 505050mm3, 1005050mm3,
50 50
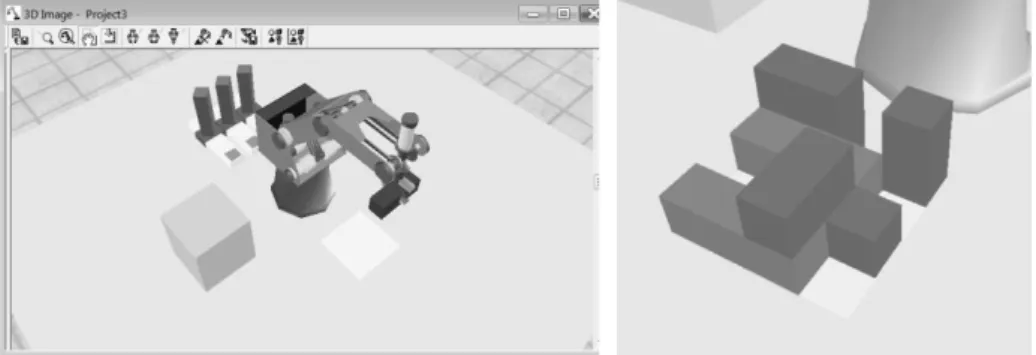
150 mm3. They worked with the virtual robotic environment (Fig. 4A) that was created using the RoboCell software [13]. Criteria for evaluation of the exercise performance included the following:
The minimum of robot movements and used parts;
Correct and precise calculation of positions of blocks in the robot workspace;
Accuracy of the robotic assembly;
Report quality.Each pair of the students got a plan (top view) of the structure to be assembled. Performing the exercise included selection of suitable parts and defining their disposi-tions in the assembly, as well as defining posidisposi-tions and programming robot pick-and-place operations to assemble the structure (Fig. 4B).
After performing the exercise, the students were asked to answer the attitude ques-tionnaire that included five questions (four semi-open and one open). The first and second questions requested students' opinion about the extent to which an industrial engineer is involved in solving spatial problems of manufacturing layout and robotic material handling. The third question asked students' views about the importance of spatial skills in planning manufacturing processes. The fourth and fifth question asked to what extent the laboratory exercise helped to understand the spatial problems of programming and operating robotic systems and difficulties faced by the engineer. A. B.
Fig. 4. A. Robotic environment; B. Assembled structure.
Responses were accepted from 111 students. Absolute majority of the freshmen (93.7%) believe that industrial engineers actively participate in solving spatial prob-lems of manufacturing. With regard to robotic material handling students' opinions are divided: 51.4% think that the industrial engineer is closely involved in planning robotic production processes, while others are of opposite opinion but believe that
understanding these processes is required. 93.5% of the students consider spatial abili-ty as important or very important for planning and management of manufacturing processes. 71.4% noted that the laboratory exercise helped them to understand prob-lems in planning and programming robot systems, among them 38.1% evaluated this impact as strong.
92.7% of the students mentioned difficulties in solving spatial problems of the la-boratory exercise. In the analysis we divided the difficulties into three categories: spatial perception, mental operation and visualization. Perception related difficulties, mentioned by the students, were in positioning and perspective taking in the robot workspace. The challenges of mental operation were in imagination of spatial move-ments (especially in the presence of obstacles), describing positions of the mechanical arm by coordinates, and understanding spatial locations of objects from their screen representations. The difficulties of visualization were related mainly to on-screen design and verification of spatial operations. Following this finding, in further experiments we plan to combine spatial learning activities in both virtual and real robotic environments.
4
Conclusion
Engineering departments at many universities have CIM and robotics laboratories similar to our lab. The labs are equipped with expensive systems that need continuous professional maintenance. They are used mostly by manufacturing majors in ad-vanced undergraduate courses and projects that focus on robot control and systems integration. The approach proposed in our paper significantly expands the use of such laboratories, particularly in introductory engineering courses for freshmen and in engineering outreach for school students.
We focus laboratory practice of these learners on training spatial reasoning skills, which are of great importance for engineering studies. In the past experiments we found that school students of grades 7-10 after practice in programming and operating robot manipulations demonstrated significant progress in performing spatial tasks.
The new experiments in the CIM and Robotics Lab indicate that even basic as-signments of programming and operating robotic cells in physical and virtual envi-ronments, being focused on spatial tasks, can facilitate meaningful spatial learning of university freshmen and senior high school students.
The novelty of these experiments was that robotic manipulations were executed with spatial test cubes instead of regular cubes. Using STCs significantly raised the complexity of the spatial reasoning tasks. In the first experiment we carefully ob-served performing the robot programming and tele-operation assignments by two high school students. The evidence of their better results in the spatial tests, and their ref-lections convinced us in the potential of using these assignments for spatial instruc-tion. Of course further investigation and careful measurement of outcomes of such spatial learning is required. In the second experiment the spatial task proposed to a quite large group of freshmen engineering students was to assemble a given block structure from blocks of different lengths placed in different orientations. The attitude questionnaire after the exercise indicated that absolute majority of the students did not
have prior experience of such exercises. Many students mentioned that the exercise helped them to understand spatial problems of computer aided manufacturing which an industrial engineer solves. The students suggested that the spatial task could be more complex, but also reported difficulties in performing it in the virtual environ-ment. We plan to continue the study and explore spatial skills, required for operating and programming multi-robot systems in manufacturing processes, and develop strat-egies for training these skills in CIM and robotics laboratories.
Acknowledgement
This work is supported by the Technion Gordon Center for Systems Engineering re-search grant.
References
1. D. F. Lohman “Spatial abilities as traits, processes, and knowledge,” in R.J. Sternberg (Ed.), Advances in the Psychology of Human Intelligence, vol. 4, pp.181-248 (1988).
2. P. Peruch, L. Belingard and C. Thinus-Blanc “Transfer of spatial knowledge from virtual to real environments,” Lecture Notes in Artificial Intelligence, Spatial Cognition II, vol. 1849, pp. 253-264 (2000).
3. S. A. Sorby “Developing 3D spatial skills for engineering students,” Australasian Journal of Engineering Education, vol. 13, no. 1, pp. 1-11 (2007).
4. S. Hsi, M. Linn and J. Bell “The role of spatial reasoning and the design of spatial instruc-tion,” Journal of Engineering Education, vol. 86, no. 2, pp. 151-158 (1997).
5. C. E. Lathan and M. Tracey “The effects of operator spatial perception and sensory feedback on human-robot teleoperation performance,” Presence, vol. 11, no. 4, pp. 368-377 (2002). 6. M. A. Menchaca-Brandan, A. M. Liu, C. M. Oman and A. Natapoff (2007) “Influence of
perspective-taking and mental rotation abilities in space teleoperation,” Proc. of the 2nd ACM/IEEE International Conference on Human-Robot Interaction HRI’07.
7. S. Jones and G. Burnett “Spatial ability and learning to program,” Human Technology: An Interdisciplinary Journal on Humans in ICT Environments, vol. 4, no. 1, pp. 47-61 (2008). 8. J. Wai, D. Lubinski, Benbow CP “Spatial ability for STEM domains: Aligning over fifty
years of cumulative psychological knowledge solidifies its importance,” Journal of Educa-tional Psychology, vol. 101, pp. 817−835 (2009).
9. I. Verner “Robot manipulations: A synergy of visualization, computation and action for spatial instruction,” International Journal of Computers for Mathematical Learning, vol. 9, no. 2, pp. 213-234 (2004).
10. J. Gomer and C. Pagano “NASA task load index for human-robot interaction workload measurement,” ITEA Journal, vol. 32, pp. 210–214 (2011).
11. O. Goldstain, I. Ben-Gal and Y. Bukchin “Remote learning for the manipulation and con-trol of robotic cells”, European Journal of Engineering Education, 32(4), pp. 481-494 (2007).
12. J. Eliot and I. Smith “An international directory of spatial tests,” NFER-Nelson (1983). 13. “RoboCell for Controller USB,” www.intelitek.com/ProductDetails.asp?Product_ID= 57&CategoryID=7&Industrial=&Education=yes.