5
IX
September 2017
Dam Automation Using DTMF Technology by
Remote Position Control of Stepper Motor
Akash Mhankale1, Sayli Mhankale2, Sagar Kashid3 1
Assistant Professor, Department of Electrical Engineering, SIT, Lonavala. 2
M.Tech Student, RIT Islampur, Sangli. 3
Assistant Professor, Department of Electrical Engineering, FTC COER, Sangola.
Abstract: In this paper, a technique is proposed for automation of dam. Door of dam will be controlled from remote position by converting angular motion of the stepper motor into linear motion. Opening and closing of door and its extent will be controlled by clockwise and anticlockwise motion of stepper motor respectively using DTMF technology. Step angle of stepper motor is assigned with different numbers of keypad of user GSM mobile. Microcontroller 89S52 is used to convert DTMF tone into control signal. By this method, doors of dam will be controlled more efficiently and more robustly without disturbance of environmental conditions.
Keywords: Dam Control Automation, Remote Position Control, DTMF, Stepper Motor, GSM Module, Step Angle, Microcontroller, ULN 2003.
I. INTRODUCTION
In general, dams are man-made barrier, which are constructed across the stream channel to impound water. They are functioning for reservoir of water for using it in emergency. But when water would be excess than capacity of dams, it is supposed to be released to avoid destruction due to damage of doors. So the opening/ closing mechanism of doors of dam is to be controlled frequently according to need and water level. Currently this mechanism is controlled with various methods like rope mechanism, gear mechanism or by centrifugal governing. But these all are conventional methods of control mechanism. Problem with these present mechanisms is that there is need to go at location of dam for operating purpose. When there would be certain worst environmental condition like heavy rainfall, lightning, storms, high temperature, it is not possible always to go at the dam location for operating opening/ closing of doors. Safety of operator is also a big issue. So there is need to control this mechanism from remote position by considering safety issue of operator.
So in this work, a technique is proposed for dam doors automation for controlling opening/ closing mechanism from remote position with more effective and secure way. The concept of remote position control is developed since end of the 18th century. Position control means controlling the motion of the object based on its different positions. This is possible using radio frequency technique which is more popular before now, but having disadvantages like less efficiency, less reliability, and congestion problems.
Here in this work, for controlling of position of door of dam, linear motion is derived from angular motion of the stepper motor with the help of a pulley.
By controlling step angle of stepper motor clockwise or anticlockwise, and its extent of movement, this phenomenon will be converted to linear one and will be converted into forward and backward linear motion. This linear motion will be assigned with opening/ closing mechanism. Steeper motor is being chosen for this work because of its characteristics and advantages like more position accuracy, faster response, and compatible to work with microcontroller, brushless. It has various applications in the fields like process control, machine tools, semiconductor industries, solar tracking system, robotics and various control applications. There are two types of stepper motor viz. unipolar and bipolar. In this work, unipolar (12 V) motor is used.
II. BLOCKDIAGRAM
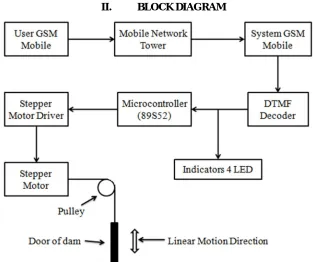
Fig. 1 Block Diagram of Proposed System
III. DESCRIPTION
The proposed system block diagram is as shown in fig. 1. From the diagram, it is clear that 2 GSM modules (handsets) are used; one is system mobile and another for operator side. User can operate mobile from anywhere, with condition of having network for operating it. Control kit containing system handset will be at dam location. The provision is made that system mobile will pick up call only from predefined user mobile; others call will not be received. Now when operator will connect to system mobile via network and if he pressed any key from keypad, DTMF tone will be generate and it will correspond to particular angular position of stepper motor.
DTMF decoder will decode the received signal and will provide it further to 89S52 microcontroller, which will process the data according to preloaded hex program to generate control signal for step angle of stepper motor. The control signal goes to motor driver ULN 2003. Microcontroller 89S52 will generate digital bit pattern of A, 6, 5, 9 for forward motion and 9, 5, 6, A for backward motion. 4 LEDs are used to show decoded signal. Further according to this change in angular position of steeper motor, linear motion is derived and opening/ closing of dam door is controlled.
IV. METHODOLOGY
1) Step 1: System mobile will be contacted by operator side mobile, which system mobile will automatically receive and deny calls from other mobiles with provision made with android app for call rejection and auto call receive.
2) Step 2: After receiving call, if user will press any number, then according to preloaded value of angle for that corresponding number, the stepper motor will be set for that step angle.
3) Step 3: 10 different step angles are assigned to 0, 1, 2,….9 numbers and * will be used for clockwise motion and # will be used for anticlockwise motion. So when the operator will press #9 from operator mobile, motor will be set for corresponding step angle in anticlockwise direction & if operator will press *9 then motor will set to corresponding step angle with clockwise direction.
4) Step 4: when there will be clockwise full deflection, doors will be fully closed and when there will be anticlockwise full deflection, doors will be completely opened.
A. DTMF Decoder
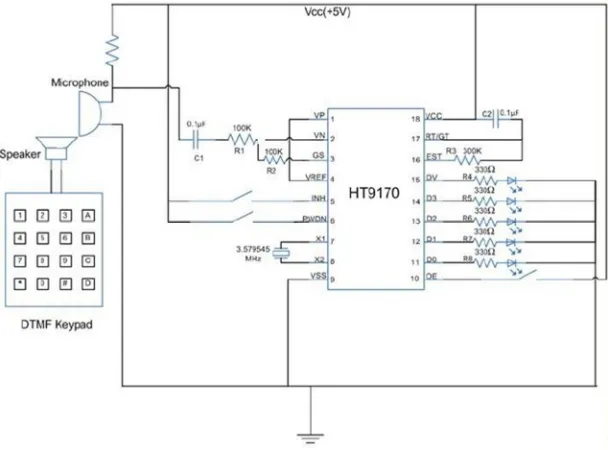
System mobile is receiving DTMF signal from user mobile phone. The specific pin of Cm8870 is connected with the tip and ring of microphone as shown in fig. 2. For gain control of the input signal, C1, R1, and R2 have been adjusted. R3 and C2 are used to set the guard time, within which valid DTMF tone must be present for its recognition. The 15th pin indicates Q-test which represents existence of valid DTMF tone.
[image:4.612.158.462.132.357.2]
Fig. 2 Circuit Diagram for DTMF Decoder.
B. ULN 2003
The ULN2001A, ULN2002A, ULN2003 and ULN2004A are high voltage, high current Darlington arrays each containing seven open collector Darlington pairs with common emitters. Each channel rated at 500mA and can withstand peak currents of 600mA. Suppression diodes are included for inductive load driving and the inputs are pinned opposite the outputs to simplify board layout. Features
1) Seven Darlington’s per package output current 500ma per driver
2) (600ma peak) .output voltage 50v integrated suppression diodes for
3) Inductive loads outputs can be paralleled for
4) Higher current ttl/cmos/pmos/dtl compatible inputs pinned opposite outputs to simplify layout.
Fig. 3 Pin Diagram for ULN 2003.
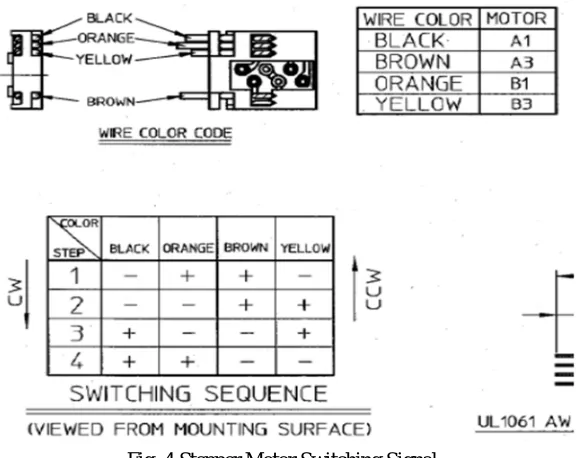
C. Stepper Motor: (12 V, unipolar)
magnetic field in the stator and rotor. The strength of the magnetic fields is proportional to the amount of current sent to the stator and the number of turns in the windings.
Fig. 4 Stepper Motor Switching Signal.
[image:5.612.114.497.407.644.2]The simulation of this work is done on the Proteus software. And we have also taken help of the Keil uVersion2 software for programming purpose. The programming is done in Keil and the hex file is inserted into the microcontroller in the simulation.
Table I
Experimental Data For Remote Positioning Of Stepper Motor With Step Angle Of 1.8°
Key to be pressed on user mobile
Output bit decoded Step angle corresponding to
pressed no.
Q3 Q2 Q1 Q0 Calculated
Angle (degree)
Observed Angle (degree)
1 0 0 0 1 000.0 000.0
2 0 0 1 0 050.8 051.0
3 0 0 1 1 101.6 102.0
4 0 1 0 0 152.4 152.8
5 0 1 0 1 203.2 204.0
6 0 1 1 0 254.0 255.2
7 0 1 1 1 304.8 306.0
8 1 0 0 0 355.6 356.0
9 1 0 0 1 406.4 407.0
0 1 0 1 0 457.2 458.1
* 1 0 1 1 508.0 508.5
# 1 1 0 0 558.8 559.0
Equivalent decimal value (m) of the decoded output of the corresponding key pressed on user mobile phone has been plotted against
the measured angular position (θm) in Fig.3. The curve shows a linear relationship. Calculated angular position (θc) and the
measured angular position (θm) in degree, corresponding to the key pressed on the user mobile phone have been plotted in Fig.4.
V. CONCLUSIONS
The experimental set up and readings observation shows that system is more robust, reliable, simple, rugged, cost effective, user friendly and linear with minimum chances of error. Dam automation is provided with operator safety. The proposed method overcomes all the problems faced with radio frequency method. This is the best non-conventional method for dam automation. The system can be controlled from remote place and still privacy and accuracy is maintained. The system motor will hold its position firmly at a given step angle providing a relatively high holding torque.
REFERENCES
[1] Sai K.V.S. and Sivaramakrishnan R , “Design and Fabrication of holonomic Motion Robot Using DTMF Control Tones”, International Conference on control, Water in A DAM”, IJSRD - International Journal for Scientific Research & Development| Vol. 4, Issue 02, 2016.
[2] Jegede Olawale, Awodele Oludele, Ajayi Ayodele and Ndong Miko Alejandro, “Development of a Microcontroller Based Robotic Arm”, proc. of the 2007 Computer Science & IT Education Conference, Mauritius, 16-18 November 2007.
[3] Andrew Gilbert, John Illingworth and Richard Bowden, “Accurate Fusion of Robot , Camera and Wireless Sensors for Surveillance Application”, IEEE 12th International Conference on Computer Vision Workshops (ICCV Workshops), Kyoto, 2009, pp. 1290-1297.
[4] Yun Chan Cho and Jae wook Jeon, “Remote Robot Control System based on DTMF of Mobile Phone” , The IEEE International conference on Industrial Informatics(INDIN 2008) DCC, Daejeon, Korea, July 13-16, 2008, pp. 1441-1446.
[5] Tulijappa M Ladwa, Sanjay M Ladwa, R Sudhrashan Kaarthik, Alok Ranjan Dhara and Nayan Dalei, “Control of Remote domestic System using DTMF”, International Conference on Instrumentation, Communications, Information Technology, and Biomedical Engineering (ICICI-BME), Bandung, Indonesia, 2009, pp. 1-6.
[6] Daniel Heß, Christof Röhrig. “Remote Controlling Technical Systems Using Mobile Devices”, IEEE International Workshop on Intelligent Data Acquisition and Advanced Computing Systems: Technology and Applications, Rende (Cosenza), Italy 21-23 September 2009, pp.625-628.
[7] T. Kubik and M. Sugisaka, “Use of a Cellular Phone in Mobile Robot Voice Control”, Proceedings of the 40th SICE Annual Conference. International Session Papers, Nagoya, 2001, pp.106-111.
[8] Muhammad Ali Mazidi & Mazidi “The 8051 Microcontroller & Embedded Systems”, Pearson Education. [9] Automation, Communication and Energy Conservation, Perundurai, India, 4-6 June 2009 , pp.1- 4.