Abstract: Traffic management has been and remains a significant issue, particularly in urban regions with elevated vehicle density. Adoption of an intelligent transport system (ITS) has extensively experimented to curb the traffic threat with blended experiences as a result. By communicating with other vehicles traveling on the same road in the form of clusters, an ad hoc vehicle network (VANET) forms and ITS that can allow vehicles with less human input to cooperate. By considering the elevated mobility nature of cars in VANET, this article provides a solution to the primary threat of VANET clustering by embracing the flexibility of fuzzy logics for cluster formation on a multilane urban high way. It also demonstrates that cluster stability is enhanced by performing the cluster head (CH) selection process based on a mixture of fuzzy logic, lane weighting, and utility function with the fuzzy membership function adjusted to boost cluster stability.
Keywords: Clustering, Intelligent Transport System (ITS), Vehicular ad hoc Network, Fuzzy Logic, Lane Weighting, VANET, Cluster Head (CH).
I. INTRODUCTION
Vehicles traveling in one direction have comparable features linked to travel direction, relative speeds, and closeness to each other. These cars can be combined in a way that enables effective and efficient leadership and data sharing with each other. Vehicle ad hoc network (VANET) is an instance of an intelligent transport scheme (ITS) with a self-organizing network architecture consisting of cars (such as motorcars, motorcycles, and buses), frequently referred to as nodes, traveling in the same direction and within a communication radius [1]–[3].Various data such as road security messages (e.g. a stationary car or accident warning) and business application messages (e.g. video and audio streaming) can be exchanged in VANET cars within a communication range[4],[5].
The VANET vehicle includes an on-board unit (OBU) which is an integrated module that enables vehicle (V2V), person (V2P), or vehicle-to-infrastructure (V2I), communication [2], [6].The most popular arrangement enables V2V or V2I communication where the infrastructure in V2I is the stationary roadside unit (RSU).Since VANET topology is not random but dynamic and predictable, vehicles can connect and share information for an extended period without breaking the link.
Revised Manuscript Received on October 05, 2019.
Mr. S. Ramakrishnan, Assistant professor, Jeppiaar SRR Engineering college, Chennai.
Ms. N. Suganthi, Assistant professor, Jeppiaar SRR Engineering college, Chennai.
This communication is produced possible by using Dedicated Short-Range Communication (DSRC), intended to support multiple vehicle communication apps with a 75 MHz band between 5,850 and 5,925GHz frequency spectrum based on IEEE 802.11p and IEEE 1609.X standard[7],[8].
Due to the elevated mobility nature of the nodes in a VANET, the network topology can often alter causing instability in the network as the network may not be robust and adaptive enough [9].Also, with the restricted bandwidth of 75 MHz assigned for communication, breakdown in communication connections is bound to be experienced. The answer to this issue is the implementation of clustering methods that divide the network into smaller units. This partitioning process, which is done based on some clustering algorithm, will group the nodes in a way that ensures longer cluster life, thus reducing the process of re-clustering. A cluster comprises nodes within certain regional limits that have been grouped and can interact with each other. These nodes in a cluster can be classified as cluster members (CM) who are the communicating nodes in a cluster or cluster head (CH) coordinating a cluster's operations. This separate classification of CM and CH offers a framework for fair communication [1], [5], [7], [10].
The main challenge with the clustering system is instability due to the mobility of the vehicle. Most researchers have proposed different complex clustering techniques and algorithms [2], [11]–[13], but they do not consider the best systems to be the simplest ones. Artificial intelligence offers a distinctive optimization function that can integrate distinct methodologies to obtain optimized output [14]–[17]. In this article, we suggest a clustering method based on a fuzzy logic based on human reasoning. The suggested novel stability fuzzy logic-based clustering algorithm (SFCA) decreases overhead re-clustering while offering an effective hierarchical network topology. The main focus of this paper is cluster stability and efficient communication within a cluster. Includes the novel contributions here;
Adaptive and simplified stable cluster head selection methodology accomplished through blurred reasoning that can be implemented for either one way or two multi-way or single-lane roads.
Incorporation of lane weighting in the CH selection to provide a CH's longer lifeline. This gives preference to the node on the middle lanes as the probability of exiting at the next junction is lower.
The organization of the rest of the document is as follows. Section II describes briefly associated works that have been released in this region.
S. Ramakrishnan, N. Suganthi
Section III discusses the process of novel clustering and selection of CH, which elaborates on the parameters to be considered during this process. Section IV and V discuss the results of the simulation and conclude the work, respectively.
II. RELATED WORK
In the past few years, ITS have grown in interest and development with the primary focus on how cars in a network can effectively and efficiently share data. Previous research has shown that, depending on the mobility metrics adopted, the VANET clustering of vehicles achieves higher performance compared to non-clustered vehicles. Some of the recent clustering methods are described in this chapter, without purporting to cover the field of VANET exhaustively.
A clustering algorithm focused on the weakest ID algorithm called the mobility-based clustering algorithm (MOBIC) is suggested in [18].MOBIC is based on the selection of the CH with the lowest ID, with each node having a fixed ID. In MOBIC, nodes transmit their IDs in range to other vehicular nodes. Each node then determines the CH as the node with the lowest ID. MOBIC is a very easy and fundamental algorithm that is intended for portable ad hoc networks (MANETs) and does not function well in VANETs; however, it forms a foundation for comparison reasons. One of the recently proposed stable algorithms for cluster formation is an algorithm called affinity propagation (AP)[19]. The stability of the cluster is significantly improved by applying AP to VANETs .Since AP is a distance-based algorithm, frequent change of CHs is common with the vehicle's dramatic change in speed. Also, due to several iterative loops required, AP has a higher delay in the formation of clusters. Also, one major deficiency of this algorithm is the lack of consideration of the vehicle speed differences of neighbors.
Souza et al.[20] suggested a clustering method based on Aggregate Local Mobility (ALM). In ALM, the sender and receiver range difference is calculated using the Received Signal Strength (RSS).The relative mobility between the two nodes is taken from the RSS ratio in two successive hello messages being disseminated. However, clear signals are hard to come by in this system because of the noise that accompanies the signals. A lane-based clustering algorithm is proposed in [21] for improved cluster lifetime stability in VANETs. In this work, the author uses an urban scenario to illustrate it. The authors argue that fewer CH changes are required for greater cluster stability. A node with the ability to be the CH for the longest moment in this network to be chosen as the CH is paramount. [22] proposes a VANET algorithm based on a hybrid backbone algorithm. The writers in this article suggested an original development of governance designated as a backbone by the nodes sharing a greater degree of connectivity in the network. Using aggregate relative node velocity in management, a choice of CH is launched. The reorganization of the cartels is also addressed through this management. However, this methodology slows down CH formation in a non-delay tolerant network. The Utility Function algorithm[23], an algorithm, utilizes the amount of velocity, distance, and
connectivity to calculate node weights. The node with the most average of the three parameters listed above is chosen as a CH. All nodes must also periodically transmit their status to other nodes in the neighborhood and within range. The suggested AMACAD [24] based on the location of the final vehicle rallies on the notion that cars heading to the same location are highly likely to maintain the same cluster. Relative and final destination, relative velocity and current position are therefore regarded in cluster formation.
The suggested VANET Intelligent Based Clustering Algorithm (IBCAV) [25] utilizes a mixture of artificial neural network (ANN) and training its network using a genetic algorithm. However, this technique provides preference to a car with reduced speed than the remainder, which can cause frequent re-clustering if the other adjacent cars are moving at a comparatively greater speed. An NNPAC (Neural Network-based Cluster Head Partitioning) is suggested in [3], which attempts to select the CH based on parameters under distinct situations. The writers argue that the choice of CH solely depends on the static parameter values in most algorithms. Apart from not considering the bias value in the implementation of ANN, the study concentrated on single hop neighbors that could lead to the creation of too many clusters in a high vehicle density region. A fuzzy logic-based clustering methodology that utilizes the direction of motion, acceleration, and velocity is suggested in [26]. A two-way multilane highway is regarded in [13] while [24] utilizes a CH stability criterion where a certain threshold must be maintained for a vehicle to stay as a CH. Calhan [15] proposes a cluster head selection algorithm (CHSA) based on fuzzy logic input parameters such as velocity, distance, acceleration, and direction. The authors argue that on a two-way multilane highway, the proposed CHSA fuzzy logic performs in both low speed and high-speed vehicle environment. In [17] the authors propose a rough set-based fuzzy clustering in a VANET cluster formation. The authors argue that, compared to other existing clustering approaches, the rough set-based fuzzy scheme achieves 10% to 20% more average cluster lifetime and 20% to 25% more cluster lifetime. However, the writers fail to obviously state the nature of the road network used (whether a single lane or a two-way multilane highway). Also, velocity, place, and direction were used as the only input parameters in the fuzzy system, thus failing to consider the distance vector.
III. VANET CLUSTERING PROCESS Network Model
During the clustering process, the following procedures are essential.
i) Neighborhood Discovery: The first stage in the clustering method is the discovery of neighboring nodes. A node to join a highway network first broadcasts a HELLO message with its data, while at the same moment gathering data from its n-hop neighbors. This data will be held in a neighboring table to be used for clustering.
ii) CH Selection: The next stage is to initialize the selection method of CH. The Cluster head Level (CHL) of each node is assessed and broadcast. This is performed on the basis of fuzzy logic, and by choice, the node with the highest CHL weight becomes the CH.This CH will perform routing and linking various roles in different clusters with other CHs. CH is also responsible for inviting other members of the cluster to join the cluster once they are within their range. If there is only one node in the area, it will automatically become the CH and broadcast, inviting to join any node within that cluster radius.
iii) Affiliation and Invite: A CH broadcast invites messages to join and participate in the cluster for all nodes in the vicinity. The rest of the members joining have become members of clusters.
[image:3.595.52.284.407.734.2]iv) Maintenance: All members periodically evaluate their link to their CH cluster to ensure there is a continuous link. It is also done on a regular basis to confirm its cluster affiliation status. When the CMs fail to obtain communication from CH, the re-clustering process will be initiated that will bring us back to step 2 above.
Fig. 1 Illustration of a VANET Road N
Fig. 2 Lane Weighting Scenario CH Selection Process
Cluster stability is a top concern when considering a CH selection criterion. A CH choice based on a fuzzy logic
approach is regarded where parameters such as velocity, direction, lane weighting, and connectivity levels are used.
Lane Weight
Vehicle traffic in an urban environment divides into three as at each intersection;
Left turn (LT) – This is where most of the traffic on the left turn to the left.
Right turn (RT) –This is where the traffic on the correct most of the lane takes the right turn.
No Turn (NT) – Traffic on this road, mostly in the center, does not take a turn, but goes straight.
The weighting of the lane helps to determine the travel lane of the vehicle. Using the number of lanes for each traffic flow (NLTF) and the total number of lanes on the road (TNL), the general lane weighing (LW) formula[21] is given as;
Where k is the vehicle lane number.
It is proposed in this work that the CH should be as much as possible a node in the middle lane. This requires lane weight variations based on the lane at which the vehicle is located. To achieve this, it is suggested that half of the total weights be allocated to the middle lane, while the outer lanes share the remaining half equally. Eq. Therefore 1 can be written as;
Where, 𝑇𝐹=𝑁𝑇𝑓𝑜𝑟𝑇𝑁𝐿>2 𝑎𝑛𝑑𝑇𝐹=𝑅𝑇=𝐿𝑇𝑓𝑜𝑟𝑇𝑁𝐿>2 For example, if we have a three-lane road with one LT, RT, and NT, then it will be the LW for each traffic flow;
Network Connectivity Level
For each traffic flow (TF) and overall NCL, the Network Connectivity Level (NCL) is first calculated. The maximum number of nodes/vehicles directly connected to the node/vehicle i is referred to as the total NCL (α).
Where j is a potential connected neighboring vehicle The connectivity level (CL) β for the TF of vehicle i is computed as
Where jTF is a vehicle sharing the TF with vehicle i. On the same TF, the total CL for the vehicle i is given as;
Where LWTF is the lane weight for the lane occupied by vehicle i.
Average Distance Level
The distance between the vehicles directly connected to the vehicle I am referred to as the total average absolute distance, δi and is given as
Where j is any vehicle related to I, and NV is the total number of vehicles connected directly to i. The average absolute distance between vehicle I and other vehicles in the same TF marked as χi is computed as;
Where j is any vehicle directly connected to I in the same TF, NVTF is the total number of vehicles directly connected to I in the same TF. The ADL is given in TF for vehicle i.
Average Velocity Level
By calculating the average velocity difference of all vehicles with that of the CH candidate, the overall Average Velocity Level (AVL) for a range of vehicles is estimated as;
Where Veli is the velocity of vehicle i.
The AVL, ρi, for the vehicle I and the TF it belongs to determine as;
Where jTF is a vehicle in the same TF as vehicle i. For vehicle in TF, the AVL is computed as
CH Selection Algorithm
[image:4.595.320.538.74.272.2]Due to the mobility and dynamic nature of nodes in VANET, a node's parameters may change before the CH selection process is completed and nodes with the highest selection probability may suddenly lose that status. In this research, fuzzy logic is used to tackle this uncertainty by introducing a rule-based system with the ' IF-THEN ' rules used in the Fuzzy Inference System (FIS).The FIS membership functions (MFs) are defined under the fuzzifier as illustrated in Figure 3, while the rule base provides the fuzzy rules. The defuzzifier lastly transforms the fuzzy sets into crisp output values.
Fig. 3 Fuzzy Logic CH Selection System
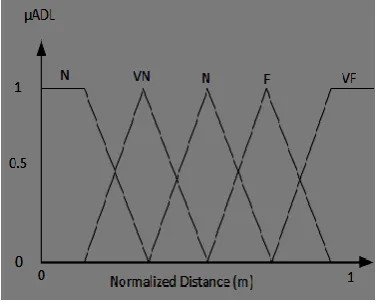
[image:4.595.329.526.396.535.2]The outcomes of equations 6, 10, and 14 for NCL, ADL, and AVL varying from 0 to 1 are fed into the fuzzy system where 5 MFs are specified for each as shown in Figure 4-6.The MFs of NCL are specified as Close (C), Very Closer (VC), Normal (N), Far (F), and Very Far (VF), while ADL has Near (N), Very Near (VN), Normal (N), Far (F), and Very Far (VF) MFs. Similarly, AVL has 5 MF as Slow (S), Very Slow (VS), Normal (N), Fast (F), and Very Fast (VF).
Fig. 4 Normalized Network Connectivity Level
[image:4.595.333.522.559.711.2]Fig. 6 Normalized Average Velocity Level All vehicles calculate and transmit their Cluster head Candidacy Level (CHL) weights to their neighbors along with their other parameters such as velocity, position, etc. The highest weighted CHL vehicle is selected as the CH based on Eq. 15.
The vehicle with the highest CHL becomes the CH.
IV. SIMULATION RESULTS
The VANET architecture suggested with a three-lane two-way hightwo-way network was simulated on MATLAB with performance metrics such as cluster size, CH length, CM length, and the average cluster lifetime among others. The roadway network used in this work is a two-way lane with a length of 1500 m and a width of 24 m (12 m each direction) and has two RSUs each with a coverage radius of 1000 m. Being a highway and assuming the random nature of vehicle speeds, the allowed maximum vehicle speed of 50 km/h (13.89 m/s) is used in this work with each simulation being simulated 1000s in real time and averaged. In addition, all vehicles on the network are equipped with an OBU and Global Positioning System (GPS) that allows the vehicle to know its position on the road segment. Using a 5.9GHz frequency QPSK modulation, the maximum communication range of a used vehicle is about 250 m radii. An RSU used is not limited to one-way vehicles but can communicate in different directions with vehicle headings. With vehicle grouping depending on the direction of movement, RSU plays a crucial role in vehicle synchronization. When a vehicle joins a road network, it transmits itself and waits for 5s for CH or RSU communication. If there is no communication from CH and a ping from 2 RSUs have been received, the vehicle is aligned with and ahead of an RSU with a lower distance difference. Using fuzzy logics, the next phase of CH selection will be initiated after communication with other vehicles within its range.
[image:5.595.49.294.54.237.2]Fig. 7 Surface Viewer: CHL vs AVL and NCL Finally, after CH choice, the CH sends a message to participants informing them of their cluster parameters. It also sends regular invitation emails to fresh vehicles wishing to enter the cluster.
[image:5.595.327.527.297.462.2]Fig. 8 Surface Viewer: CHL vs ADL and NCL Figures 7 and 8 demonstrate the surface view output of a blurred inference system. It can be seen that NCL is a key element in the nomination of CH. The production of a CHL scheme from both figures is directly proportional to ADL, AVL, and NCL.
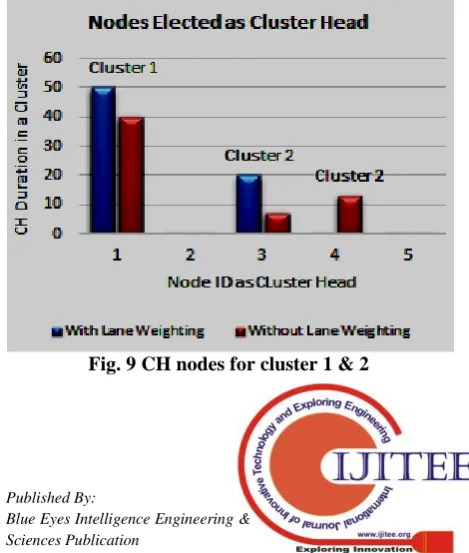
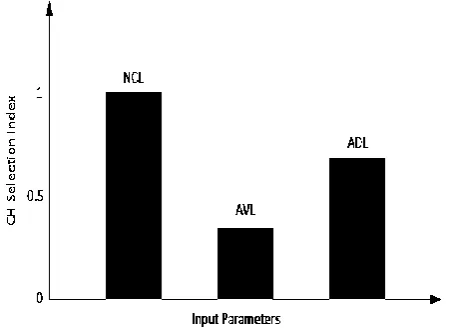
[image:5.595.312.547.560.837.2]A comparison of the same vehicle scenario with and without lane weighting was made to compare the effect of lane weighting on CH stability. A vehicle with ID no. 1 is selected as the CH for cluster one while a vehicle with ID no. 3 becomes a CH of cluster 2 both for two situations as shown in Figure 9.The duration of node 3 as CH without the use of lane weighting was shorter and node 4 was then selected as the new CH for the simulation period. CH is re-selected when a CH leaves the cluster and another CH has to be selected to take over the cluster's coordination operation. Figure 10 shows the impact of the selection of different input parameters. NCL is a crucial parameter in the selection as it is important for a CH to have as many as possible the highest number of directly connected vehicles. The average distance level is the second most important parameter simply because a vehicle outside the cluster range or at the furthest point of the cluster cannot become a CH, but the preference is for the node in the middle of the cluster as much as possible. Figure 11 shows the average number of nodes in the VANET network in each cluster.
[image:6.595.56.281.496.666.2]Fig. 10 CH Selection Index based on Input Parameters
Fig. 11 Average No. of Nodes in a Cluster V. CONCLUSIONS
In this work, an efficient fuzzy logic-based clustering algorithm (SFCA) for VANET that reduces overhead re-clustering is proposed. By using parameters such as vehicle speed, speed, and connectivity level, extremely stable clusters that are optimal for VANETS can be accomplished by applying the suggested clustering system. It has also been
shown that for a more effective and efficient clustering process, the lane weighting system can be integrated effectively in fuzzy logic-based clustering systems.
REFERENCES
1. Abuashour and M. Kadoch, “Performance improvement of
cluster-based routing protocol in VANET,” IEEE Access, vol. 5, pp. 15354– 15371, 2017.
2. P. K. Dharmawardena and Z. Wang, “Cluster Head selection Based
Routing Protocol for VANET Using Bully Algorithm and Lamport Timestamp,” Int. J. Comput. Theory Eng., vol. 9, no. 3, pp. 218–222, 2017.
3. S. Thirumurugan and J. B. Gnanadurai, “A Novel Application based
Generic Cluster Creation Mechanism in Ad Hoc Networks,” Int. J. Comput. Networks Appl., vol. 4, no. 4, pp. 113–120, 2017.
4. R. P. Surender Pal, “Vanet Based Simulation Using [4]Cluster,” Int. J.
Latest Res. Sci. Technol., vol. 6, no. 3, pp. 25–28, 2017.
5. G. Martuscelli, A. Boukerche, L. Foschini, and P. Bellavista, [5]“V2V
protocols for traffic congestion discovery along routes of interest in VANETs: a quantitative study,” Wirel. Commun. Mob. Comput., vol. 16, no. June 2009, pp. 2907–2923, 2016.
6. Cooper, D. Franklin, M. Ros, F. Safaei, and M. Abolhasan, “A
Comparative Survey of VANET Clustering Techniques,” IEEE Commun. Surv. Tutorials, vol. 19, no. 1, pp. 657–681, 2017.
7. K. D. Singh, P. Rawat, and J. Bonnin, “Cognitive Radio for Vehicular
Ad Hoc Networks ( CR-VANETs ): Approaches and Challenges,” EURASIP J. Wirel. Commun. And Networking, vol. 1, no. 49, pp. 1– 22, 2014.
8. X. He, W. Shi, and T. Luo, “Survey of cognitive radio VANET,” KSII
Trans. Internet Inf. Syst., vol. 8, no. 11, pp. 3837–3859, 2014.
9. G. V. Rossi, Z. Fan, W. H. Chin, and K. K. Leung, “Stable clustering
for Ad-Hoc vehicle networking,” IEEE Wirel. Commun. Netw. Conf. WCNC, 2017.
10. N. Nguyen-Thanh and I. Koo, “A Cluster-Based Selective Cooperative
Spectrum Sensing Scheme in Cognitive Radio,” Eurasip J. Wirel. Commun. Netw., vol. 2013, no. 1, pp. 1–9, 2013.
11. A. H. Khalid, Z. Lian, L. Zaiyi, and M. Bobby, “Clustering and
OFDMA-based MAC protocol (COMAC) for vehicular ad hoc networks,” EURASIP J. Wirel. Commun. Netw., vol. 2011, no. 1, p. 117, 2011.
12. E. C. Eze, S. J. Zhang, E. J. Liu, and J. C. Eze, “Advances in Vehicular
Ad-Hoc Networks (VANETs): Challenges and Road-Map for Future Development,” Int. J. Autom. Comput., vol. 13, no. 1, pp. 1–18, 2016.
13. M. Shoaib, W. C. Song, and K. H. Kim, “Cluster based data
aggregation in vehicular adhoc network,”Nets4Cars/Nets4Trains, pp. 91–102, 2012.
14. A. El Khatib, A. Mourad, H. Otrok, O. A. Wahab, and J. Bentahar, “A
Cooperative Detection Model Based on Artificial Neural Network for VANET QoS-OLSR Protocol,” in 2015 IEEE International Conference on Ubiquitous Wireless Broadband, ICUWB 2015, 2015, pp. 1–5.
15. L. I. ÇALHAN, “A Fuzzy Logic Based Clustering Strategy for
Improving Vehicular Ad-Hoc Network Performance,” Sadhana - Acad. Proc. Eng. Sci., vol. 40, no. 2, pp. 351–367, 2015.
16. R. S. Jadhav and M. M. Dongre, “Performance Enhancement of Vanets
Using Fuzzy,” no. 2, pp. 39–42, 2017.
17. Jinila, “Rough Set Based Fuzzy Scheme for Clustering and Cluster
Head Selection in VANET,” Elektron. IR Elektrotechnika, vol. 21, no. 1, pp. 54–59, 2015.
18. P. Basu, N. Khan, and T. D. C. Little, “A Mobility Based Metric for Clustering in Mobile Ad Hoc,” in 21st International Conference on Distributed Computing Systems Workshops, 2001, pp. 413–418.
19. Shea, B. Hassanabadi, and S. Valaee, “Mobility-based clustering in
VANETs using affinity propagation,” in GLOBECOM - IEEE Global Telecommunications Conference, 2009, pp. 1–6.
20. Souza, I. Nikolaidis, and P. Gburzynski, “A new Aggregate Local
Mobility (ALM) clustering algorithm for VANETs,” in IEEE International Conference on Communications, 2010, pp. 1–5.
21. S. A. Mohammad and C. W. Michele, “Using traffic flow cluster
22. J. P. Singh and R. S. Bali, “A hybrid backbone based clustering algorithm for vehicular ad-hoc networks,” in International Conference on Information and Communication Technologies, 2015, vol. 46, pp. 1005–1013.
23. A. W. Min, X. Zhang, and K. G. Shin, “Detection of small-scale
primary users in cognitive radio networks,” IEEE J. Sel. Areas Commun., vol. 29, no. 2, pp. 349–361, 2011.
24. M. M. Caballeros Morales, C. S. Hong, and Y. C. Bang, “An
Adaptable mobility-aware clustering algorithm in vehicular networks,” in APNOMS 2011 - 13th Asia-Pacific Network Operations and Management Symposium: Managing Clouds, Smart Networks and Services, Final Program, 2011, pp. 1–6.
25. M. Mottahedi, S. Jabbehdari, and S. Adabi, “IBCAV :Intelligent Based
Clustering Algorithm in VANET,” IJCSI Int. J. Comput. Sci. Issues, vol. 10, no. 1, pp. 538–543, 2013.