2016 International Conference on Mathematical, Computational and Statistical Sciences and Engineering (MCSSE 2016) ISBN: 978-1-60595-396-0
An Improved Data Exchange Algorithm Based on the Unstructured Grids
Lin HUO
*and Tao YANG
College of Aerospace and Material Engineering, National University of Defense Technology, Changsha, China
*Corresponding author
Keywords: Data exchange, Unstructured grids, Unstructured Panel Inside Projective Constant-Volume Tetrahedron (UPIPCVT).
Abstract. Data exchange (load transfer) between boundaries is a key technique in multi-physics coupling numerical simulation. Based on the relationships of point and triangle in unstructured grids, an improved data exchange algorithm, namely Unstructured Panel Inside Projective Constant-Volume Tetrahedron (UPIPCVT), is proposed for higher precision. Furthermore, the achieved data of target point is calculated by tri-linear interpolation function in the projective panel, so that it makes the computation more simple. Examples show that UPIPCVT shows a good precision and computation efficiency in data exchange.
Introduction
With the rapid development of computer and coupling algorithm, multi-physics coupling attracts more attentions in engineering applications[1]. For its ability to fully utilize the mature algorithms for single physics filed, and lower computation resource required, loose coupling is widely adopted in multi-physics coupling analysis. In loose coupling simulation, however, the equations of each field are solved separately and then the coupled data is exchanged on the boundaries[2].
Data exchange on the field boundaries, which deeply influences the precision of the multi-physics coupling simulation, is one of the key techniques for the coupling computation, and serious distortion may induce non-physics results.
Recently, a lot of data exchange algorithms[3-7] have been developed for multi-physics coupling, such as Nearest Neighbour Interpolation (NNI), Weighted Residual Methods (WRM), Radial Basis Functions (RBF), Infinite-Plate Splines (IPS), Multi-quadric Bihannonic Splines (MQ), Thine-Plate Splines (TPS), Boundary Element Method (BEM), Constant-Volume Tetrahedron (CVT), et al in the Fluid-Structure Interaction(FSI), and Non-Uniform B-Spline (NUBS) used in the CAD/CAE of engineering design.
Since proposed by Goura, CVT has been extensively applied in data exchange for multi-physics coupling and refined further[8]. Basing on the point-triangle relationship in unstructured grids and tri-linear interpolation, the work in this paper takes effort to improve the quality of CVT, in order to get higher precision and efficiency data exchange algorithm.
Unstructured Panel Inside Projective Constant-Volume Tetrahedron
Construction Principles of Tetrahedron
ap
a
s1
s2
[image:2.595.228.372.75.216.2]s3
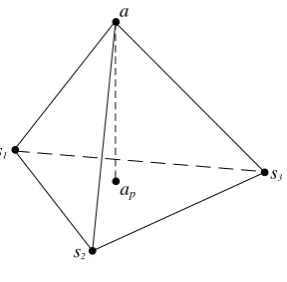
Figure 1. CVT interpolation.
As shown in Figure 1, it could always be achieved to find three nearest, but non-colinear points
, ,
i s ij
s t x (i ,j=1, 2, 3) in the grids of source field for the interpolation point a t x
, a i,
(i=1, 2, 3) in the grids of target field. The subpoint of a t x
, a i,
in the plane defined by s t xi
, s ij,
is assumed as
, ,
p a i
a t x , which follows the relationships:
, , ( , 1, 2,3)
p i j s j
x x i j
(1)
, ( ) ( 1, 2,3)
a p i i
x x v t n i
(2)
Where
3
1
1 j j
, ni is normal vector of the triangle s1s2s3, the value of v(t) is chosen to ensure thatthe volume of the tetrahedron formed with a and si is constant.
Since the data exchange function is determined, the precision of data exchange is affected significantly by tetrahedron. In UPIPCVT, the tetrahedron underside is a panel of the unstructured grids.
Little differences exist between the precisions of different data exchange algorithms on non-match meshes at small curvature, while it may be obvious at large curvature. To decrease computation error at large curvature, some construction principles of tetrahedron should be abided.
(1) Three points on a tetrahedron underside should belongs to one panel of the unstructured grids, and to ensure the normal direction of the tetrahedron underside, points of all the panels should be numbered clockwise or counterclockwise.
(2) The subpoint should be in the tetrahedron underside, namely in one panel. But if at large curvature and that cannot be made up, it must ensure that the difference of the sum of volumes of three tetrahedrons, the underside of which is made up of each two points of the chosen panel and the subpoint, and the volume of original tetrahedron is the smallest.
Tetrahedron Construction
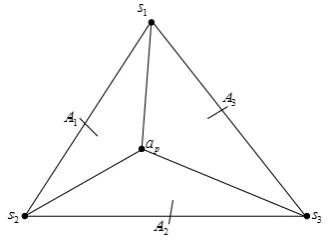
As shown in Figure 2, it is obvious that the subpoint ap and the three source points si(t) (i=1, 2, 3) lie in
the same plane. On the assumption that the area of the triangle s1s2s3 is A, the area of triangle the
s1s2ap is A3, the area of the triangle s2s3ap is A1, the area of the triangle s3s1ap is A2, the relationships
between the subpoint and the source triangle s1s2s3 could be defined by the following equations.
1 2 3
1 2 3
inside
outside
A A A A
A A A A
Figure2. Point locating inside triangle.
Based on the relationships between point and triangle, the Unstructured Panel Inside Projective CVT (UPIPCVT) can be formed, and the process is as showed in Figure 3.
Step1: Search for the nearest source point to the target point, and record all the panels that contain the selected source point.
Step2: Compute the relationships between point and triangle in one of the panels and record the sum of the squares of three triangle made up of the subpoint and each two points of the panel.
Step3: Judge the relationship based on step2, if the subpoint is inside the triangle then the panel is the one that is looked for, and step4 is passed over. If the subpoint is outside the triangle then record the difference between the sum of the squares of three triangle made up of the subpoint and each two points of the panel and the original triangle square and go back to step2.
Step4: Rank the differences and the panel with the smallest difference is the one that is looked for. Record the number of the panel.
Step5: Record the numbers and the coordinates of the three points of the panel.
Select the nearest source point and
the panels containing it
Take each panel and compute
1 2 3
AAA
Relationship between A and
1 2 3
AAA
1 2 3
AAA A
1 2 3
AA A A
All panels are considered No
Find the panel with smallest
difference Yes Take the
coordinate of target point
Record the panel number and containing point
[image:3.595.215.379.74.194.2]information
Figure 3. Process of UPIPCVT.
Verification Examples
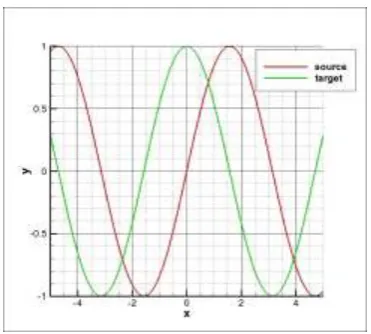
Figure 4. Non-match meshes of verification example.
In the verification example, x
5, 5
and the feature size of source mesh is dx0.5 and that oftarget mesh is dx0.01, 0.1, 0.5, 1 respectively. The value of source mesh point fits for F10sin(x). Nearest Neighbour Interpolation(NN), Multi-quadric Bihannonic Splines (MQ) and Gauss algorithms are chosen for contrast to UPIPCVT. The precision and efficiency of the results are showed in Table 1 and Table 2 respectively.
Table 1. Result precision.
dx = 1 dx = 0.5 dx = 0.1 dx = 0.01
NN
Maximum error 9.872904932 9.872904932 12.42586460 12.42586460 Average error 6.349802525 5.767132664 5.969801537 5.900201474
Gauss
Maximum error 1.29639e-10 4.56579e-10 2.99544e-09 0.096032673 Average error 6.50926e-11 1.89088e-10 1.14382e-09 0.000191912
MQ
Maximum error 1.29639e-10 4.56579e-10 2.99544e-09 0.096032976 Average error 6.50926e-11 1.89088e-10 1.14382e-09 0.000192025
UPIPCVT
[image:4.595.77.521.360.740.2]Maximum error 1.03036e-08 4.56579e-10 3.73640e-08 0.096032660 Average error 2.14782e-09 1.89088e-10 2.38683e-08 0.000191875
Table 2. Computation time.
t
(dx=1) t(dx=0.5) t(dx=0.1) t(dx=0.01)
Gauss 0.00198438 0.003906 0.021563 0.153125
MQ 0.00186563 0.003156 0.018438 0.143750
UPIPCVT 0.00163125 0.002344 0.012188 0.117187
NN 0.00064375 0.001125 0.003438 0.022656
Gauss and MQ method. UPIPCVT method is at an advantage in data exchange computation especially when large number of points are in the two non-match meshes.
Summary
In this paper, a data exchange algorithm called UPIPCVT is proposed based on the relationships of point and triangle in unstructured grids. By taking example verification, UPIPCVT shows a good performance in data exchange. It has a high precision as well as a high computation efficiency contrasted to classical algorithms. It can well fit for the data exchange computation in multi-physics coupling problem.
Acknowledgement
This research was financially supported by the National Science Foundation.
References
[1] Eric L. Blades, James C. Newman. Computational Aeroelastic Analysis of an Unmanned Aerial Vehicle using U2NCLE. AIAA 2007-2237.
[2] Juan R. Cebral, Rainald L. On the Loose Coupling of Implicit Time-Marching Codes. AIAA 2005-1093.
[3] Charbel Farhat, Charbel Lesoonne. A conservative algorithm for exchanging aerodynamic and elastodynamic data in aeroelastic. AIAA 98-0515.
[4] Juan Raul Cebral, Ranald L. Conservative load projection and tracking for fluid-structure problems. AIAA 96-0797.
[5] Vipperla B. Venkayya, Victoria A. Tischler. Force and displacement transformations for aero-structure interaction analysis. AIAA 2004-4328.
[6] Sadeghi M., Liu F. Application of Three-Dimensional Interfaces for Data Transfer in Aeroelastic Computations (AIAA 2004-5376).
[7] Aukje De Boer, Hester Bijl, Alexander Van Zuijlen. Comparing Different Methods for the Coupling of Non-Matching Meshes in Fluid-Structure Interaction Computations. AIAA 2005-4620.