2016 International Conference on Wireless Communication and Network Engineering (WCNE 2016) ISBN: 978-1-60595-403-5
An Improved Adaptive Genetic Algorithm Based on Multi - user
Cooperative Spectrum Sensing
Lu-yong ZHANG, Tian-shun GONG and Pei-pei ZHU
Beijing University of Posts and Telecommunications, Beijing, 100876, China
Keywords: Improved adaptive genetic, Cognitive radio, Cooperative, Multi-user.
Abstract. In this paper, the collaborative spectrum sensing technique of multiuser is studied, and the global detection probability is obtained by allocating the weight of each user through the control center under the given false alarm probability. The maximum global detection probability is deduced, and an improved adaptive genetic algorithm is used to solve the optimal combination of weight distribution to reduce the detection time of spectrum sensing. In addition, the non-cooperative and cooperative, optimal linear, genetic algorithm and improved adaptive genetic algorithm are simulated and compared. The results show that the detection reliability of spectrum sensing system can be effectively improved by multi-user cooperative, and the convergence rate of the optimal solution is improved by the improved adaptive genetic algorithm, which reduces the spectrum detection time.
Introduction
In the communication process, a large number of spectrum resources are idle in time and space. The cognitive radio technology improves the spectral efficiency of the wireless network by utilizing the idle licensed spectrum without affecting the communication among the other primary users [1][2]. In cognitive radio, when the primary user is idle, the cognitive user can access the spectrum awareness by guaranteeing spectrum quality of the primary user in order to maximize the spectrum utilization. Multi-user cooperative detection can effectively improve the reliability of detection by combining different cognitive users to detect the primary users and reduce the impact of external factors which usually appear in single cognitive user cases[3][4]. Therefore, the collaborative spectrum sensing technology has been widely concerned and applied [5] [6][7]. An algorithm was proposed by Quan, which combines the weights for each cognitive user's perception in a linear way, and optimizes the weights through the fusion center in order to maximize the detection probability when the interference to the main user is less than the threshold[8] [9].
In this paper, the cooperative spectrum sensing problem using multiuser is studied and the detecting probability of multi-user cooperative spectrum sensing is deduced. Once the probability of false alarm is fixed, the weight of each cognitive user is optimally assigned by the FC in order to the global detection probability. Furthermore, an improved adaptive genetic algorithm is proposed to solve the multi-user collaborative spectrum sensing optimization. The detection time of genetic algorithm and improved adaptive genetic algorithm are analyzed and simulated.
System Model
Suppose there is a primary user and M cognitive users and the primary user transmits and receives J antennas. All cognitive users have the same antenna number, which is denoted as L1=L2=···=LM=L.
Suppose that the test of the i-th cognitive users in the k-th time slot is as follows:
{H0(idle): xi(k) = H̅iz̅i(k) + vi(k), i = 1, ⋯ , M H1(busy): xi(k) = His(k) + H̅iz̅i(k) + vi(k), i = 1, ⋯ , M
(1)
ui = ∑Nk=1|xi(k)|2, i = 1, ⋯ M (2)
The sampling result uiis transmitted to the control center, and the control center receives the first i user’s statistics, which can be expressed:
yi = ui+ ni (3)
In the equation, ni~N(0,δi2IL) is an additive Gaussian white noise with mean 0 and variance
δi2. The control center assigns the weighting factor wi to the statistical results of each cognitive user, and then the equation (4) is applied to obtain the global detection result.
yc = ∑Mi=1wiyiwTy (4)
among them, w = (w1, ⋯ wM)T, y = (y1, ⋯ yM)T.
Multi-user Collaboration Spectrum Sensing
For a single cognitive user's spectrum sensing, the detection information in N time slots is expressed as follows:
E[ui]={||H̅i||F
2E
k+ NLσi2, H0
||Hi||F2Es+ ||H̅i||F2Ek+ NLσi2, H1
(5)
among them, Es = ∑Nk=1|sj(k)|2, j = 1, ⋯ , L, Ek= ∑Nk=1|zij(k)|2, j = 1, ⋯ , (M − 1)L . In the
multi-user cooperative spectrum sensing model, the signal sent by other cognitive users can be
equivalent to noise, use σ̂i2 = ||H̅i||F 2
Ek
NL +σi
2, i = 1, ⋯ , M. At this time, u
i/σ̂i2 obeys the degree of
freedom of N × L chi-square distribution, which can be expressed as follows:
u̅i={
NLσ̂i2, H0 (NL +ηi)σ̂i2, H1
var[ui]={
2NLσ̂i4, H0
2(NL + 2ηi)σ̂i4, H1 (6) The false alarm probability and detection probability of a single cognitive user can be deduced respectively:
Pf(i) = Q (γi−E(ui|H0)
√var(ui|H0)), Pd
(i)
= Q (γi−E(ui|H1)
√var(ui|H1)) (7)
In the equation, γi is the decision threshold.
In order to improve the accuracy of detection, multi-user collaboration spectrum sensing can be used. According to the equation (4), the mean value of the cooperative detection yc is expressed as:
y̅i = {
NLσTw, H
0
(NLσ+ Esg)Tw, H1
(8)
In the formula,σ= (σ̂12, ⋯σ̂M2)T, g = (||H1||F2, ⋯ ||HM||F2)T, the variance of the corresponding yc
is expressed as:
var[yc] = {
wT(2NLdiag2(σ) + diag(δ))w , H0 wT(2NLdiag2(σ) + diag(δ) + 4E
sdiag(g)diag(σ))w, H1
(9)
The false detection probability Pf and the detection probability Pd of the cooperative detection are expressed respectively as:
Pf= Q (γc−NLσTw
√wTAw ) , Pd = Q (
γc−(NLσ+Esg)Tw
√wTBw ) (10)
When Pf is fixed, the decision threshold and the detection probability Pd can be obtained as follows:
γc = Q−1(P
f)√wTAw + NLσTw, Pd = Q (
Q−1(Pf)√wTAw−EsgTw
√wTBw ) (11)
From equation (19), is known that the cooperative spectrum sensing is to find the optimal detection probability Pd when Pf is fixed. Since the Q function is a non-increasing function, the definition f(w) is as follows, and the detection probability Pdis maximized when the function f(w) is minimized.
f(w) =Q−1(Pf)√wTAw−EsgTw
√wTBw (12)
Therefore the cooperative spectrum sensing detection results of the multi-user are expressed as follows:
min𝑓(𝑤) s. t||w||22 = 1 (13)
Using Improved Adaptive Genetic Algorithm for Multi-user Collaboration Spectrum Sensing
As a global searching algorithm based on natural selection and population genetic mechanism, genetic algorithm is widely used in solving many non-convex problems [11]. However, due to the unchanged crossover probability and mutation probability, the simple genetic algorithm (GA) can avoid the premature convergence due to its slow convergence rate. Therefore, in order to avoid these shortcomings of the traditional genetic algorithm, an improved adaptive genetic algorithm (IAGA) is used to solve the multi-user cooperative sensing optimization problem [10][11].
Individuals: As the solution of the multi-user cooperative spectrum sensing problem, the individual can be defined as the amount which needs to be optimized, is the fusion center to each user detection information distribution weight w. Assuming the number of individuals in IAGA is P, The individual i is expressed as xi = [xi1, ⋯ xiD], xi = 1, ⋯ , P, defining xi = w, D = M, where D denotes the individual dimension.
Fitness function: IAGA through the value of fitness function to assess the merits of the individual, the fitness function is defined for each individual which represents the weight value of the test results is expressed as follows:
fitness(xi) = f(xi) (14) It can be seen from the above equation that the smaller the individual fitness value in the population, the greater the detection probability of the representation of the weight represented by the individual, so the better the individual.
The concrete solution steps are:
1. Population initialization. P individuals are randomly generated and normalized xi=
xi
||xi||, xi = 1, ⋯ , P.
2. Sort. The fitness value of each individual is calculated according to formula (14), and then it is sorted.
3. Crossover and Variation. Some individuals with the best fitness are selected into the hybrid
pool, and two pairs are randomly selected according to the crossover
probability Pc Cross-introduction of the survival of the fittest strategy to ensure the quality of future generations. According to the mutation probability Pm, some individuals are selected for mutation. The probability of crossover is controlled by the crossover probability Pc. The optimal
Pcand Pm can keep the diversity of the population and guarantee the convergence of the algorithm.
When 𝑓𝑎𝑣𝑔
𝑓𝑚𝑎𝑥 > 𝑎 and
𝑓𝑚𝑖𝑛
𝑓𝑚𝑎𝑥 > 𝑏, the population is considered to be concentrated, where 0.5 < a <
Pc = {
Pcfmax
fmax−fmin,
favg
fmax> 𝑎,
fmin
fmax> 𝑏
Pc , other
Pm= {
Pmfmax
fmax−fmin,
favg
fmax> 𝑎,
fmin
fmax > 𝑏
Pm , other
(15)
In these equations, fmax denotes the maximum fitness value in the population, fmin denotes the
minimum fitness value in the population, favg denotes the average fitness value of each generation,
f denotes the fitness value of the individual to be mutated, 𝑃𝑐 = 0.8, 𝑃𝑚 = 0.1, a = 0.65,b = 0.08. 4. Good quality of the reservation. All the individuals are combined and normalized, and the fitness value of each individual is calculated. The individuals with lower fitness value are selected into the next round of matching pool.
5. Stop. Repeat steps 2 to 4 until the required number of iterations is reached.
6. Output the result. The global optimal value is obtained, and the detection probability is obtained.
Results and Analysis
[image:4.595.211.376.320.455.2]According to the theoretical derivation above, the performances are simulated and discussed in this section. The number of sampling points N = 20, the maximum number of iterations T = 50, and the crossing individual protection C = 8.
Figure 1. The Pd of different antenna configurations.
[image:4.595.217.374.544.670.2]Figure 1 shows the probability of detection probability changes with different number of cognitive users and number of antennas. It can be seen from Figure 2 that the cooperative spectrum sensing system can get a higher probability of detection and increase the reliability of the system detection with the increase of the number of transmitting and receiving antennas.
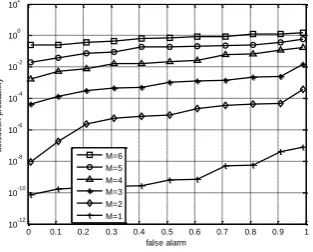
Figure 2. The Pd of different cognitive users.
It is indicated in Figure 2 that the cooperative sensing can significantly improve the performance of system perception. With the increase of cognitive users in cooperative sensing, the probability of detection increase.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 10-14 10-12 10-10 10-8 10-6 10-4 10-2 100 false alarm d e te c ti o n p ro b a b ili ty J=2,L=2 J=2,L=1 J=1,L=2 J=1,L=1
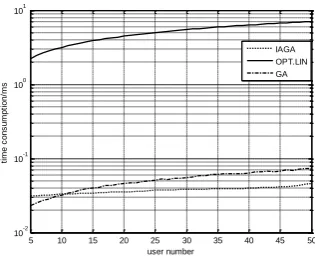
Figure 3. Different algorithms in solving the test results with time chart.
In Figure 3, the average linear combination (OPT.LIN) algorithm, genetic algorithm and improved adaptive genetic algorithm in solving the spectrum sensing problem are compared. As can be seen from the figure, the improved adaptive genetic algorithm takes the least time to reduce the problem solving time and improve the perceived efficiency.
Conclusion
In this paper, an improved adaptive genetic algorithm is proposed to solve the multi-user cooperative spectrum sensing problem in order to reduce the detection time and improve the detection efficiency. The simulation results show that the cooperative spectrum sensing detection probability of the multiuser is larger than that of the non-cooperative and single-antenna sensing scheme. The improved adaptive genetic algorithm use the perceptual time less than that of the optimal linear combination algorithm and the traditional genetic algorithm, which improves the performance of spectrum sensing system.
Acknowledgement
This work was supported by the National Natural Science Foundation of China (61379016, 61471061).
References
[1] Liang Y C, Chen K C, Li G Y. Cognitive Radio Networking and Communications: An Overview[J]. IEEE Trans, 2011, 60( 07) :3386-3407.
[2] Zhi Q, Cui S, Sayed A H. Optimal linear cooperation for spectrum sensing in cognitive radio networks. IEEE JST Signal Process, 2008, 2: 28-40.
[3] Chaudhari S, Luden J. Cooperative Sensing with Imperfect Reporting Channels: Hard Decisions or Soft Decisions[J].IEEE. 2012, 60( 01) : 18-28.
[4] Jubin James Thennattil, Ebin M. Manuel. A Novel Approach in Cooperative Spectrum Sensing for Cognitive Radio. IEEE Recent Advances in Intelligent Computational Systems (RAICS), 2013, 43-47.
[5] Zhuang W, Ismail M. Cooperation in Wireless Communication Networks[J]. IEEE Wireless Communications, 2012, 19( 02) : 10-20.
[6] Deepa Das, Susmita Das. Cooperative spectrum sensing using hybrid IWOPSO algorithm in cognitive radio networks. IEEE, 2015.
[7] Divyesh R Keraliya, Ashalata Kulshrestha. Optimization of cooperative spectrum sensing in cognitive radio for mobile communication. IEEE, 2015.
5 10 15 20 25 30 35 40 45 50 10-2
10-1 100 101
user number
ti
m
e
c
o
n
s
u
m
p
ti
o
n
/m
s
[8] Quan Z, Cui S, Sayed A H. Optimal linear cooperation for spectrum sensing in cognitive radio network [J]. IEEE J, 2008, 2(12):28-40.
[9] Xinyu Wang, Min Jia, Qing Guo. A soft decision rule for cooperative spectrum sensing in mobile cognitive radio networks. IEEE, 2015.
[10] Coello C A, Lamont G B. Evolutionary Algorithms for Solving Multi-Objective Problems. 2nd, New York: Springer-Verlag, 2007.