ABSTRACT
KYUNG, MINJUNG. Generalized Conditionally Autoregressive Models. (Under the direction of Sujit K. Ghosh.)
In many studies, lattice or area data are observed and spatial analysis is performed. A
spatial process observed over a lattice or a set of irregular regions is usually modeled
using a conditionally autoregressive (CAR) model. The neighborhoods within a CAR
model are generally formed using only the inter-distances or boundaries between the
regions. To accommodate the effect of directions, a new class of spatial models is
developed using different weights given to neighbors in different directions. The
pro-posed model generalizes the usual CAR model by accounting for spatial anisotropy.
Maximum likelihood (ML) estimators are derived and shown to be consistent and
asymptotically normal under some regularity conditions. Also, the posterior
distri-bution of the parameters are derived using conjugate and non-informative priors.
Effi-cient MCMC sampling algorithms are provided to generate samples from the marginal
posterior distribution. Simulation studies are presented to illustrate the finite sample
performance of the new model as compared to CAR model. The method is
demon-strated using a data set on the crime rates in Columbus, OH. Further generalization
of the directional CAR model is proposed that adaptively chosen the neighborhoods
based on a smooth function of the inter-distances and inter-angles between the
re-gions. The parameters of this generalized CAR are estimated using ML and Bayes
estimators. A data set on the prevalence of elevated blood lead levels of children
under the age of six years observed in the state of Virginia is used to illustrate the
Generalized Conditionally Autoregressive Models
by
Minjung Kyung
A dissertation submitted to the Graduate Faculty of North Carolina State University
in partial fulfillment of the requirements for the Degree of
Doctor of Philosophy
STATISTICS
Raleigh, North Carolina
2006
APPROVED BY:
Dr. Sujit K. Ghosh Dr. Marcia Gumpertz
Chair of Advisory Comittee
Biography
Minjung Kyung was born in Seoul, South Korea in 1976. Minjung earned her B.S. of
Statistics in 2000 from Duksung Women’s University in Seoul. She joined Department
of Statistics, Rutgers, the State University of NJ in 2000 and took her M.S. in 2003.
In 2003, she entered graduate school at North Carolina State University in Raleigh.
Acknowledgements
First of all, I would like to thank my family and friends for their love and support.
I am very fortunate to have such wonderful people in my life. They have always
encouraged me to achieve my goals and helped me to get through tough times. I
would have not finished my study at NC State without them.
I also would like to express my deepest gratitude and biggest appreciation to my
advisor Dr. Sujit K. Ghosh. He has been of great help for me to write this thesis. I
have learned so much from him.
My committee members, Dr. Gumpertz, Dr. Fuentes and Dr. Zhang, have been
very helpful. I would especially like to thank them for their comments on this thesis.
Contents
List of Tables vii
List of Figures xi
1 Introduction to Conditionally Autoregressive Models 1
1.1 Markov Random Field . . . 5
1.2 Gaussian CAR models . . . 9
1.3 Parameter estimation . . . 12
1.3.1 Maximum likelihood estimation . . . 12
1.3.2 Bayesian estimation . . . 14
1.4 A simulation study . . . 18
1.4.1 Results based on ML estimates . . . 20
1.4.2 Results based on Bayes estimates . . . 22
1.5 Extensions of CAR model . . . 24
2 Directional CAR models 26 2.1 Directional CAR models . . . 27
2.2 Gaussian DCAR models . . . 30
2.3 Parameter estimation . . . 32
2.3.1 Maximum likelihood estimation . . . 32
2.3.2 Bayesian estimation . . . 39
2.4 A simulation study . . . 42
2.4.1 Results based on ML estimates . . . 43
2.4.2 Results based on Bayes estimates . . . 45
2.5 Comparison of CAR and DCAR . . . 47
2.5.1 Results based on CAR data . . . 49
2.5.2 Results based on DCAR data . . . 54
2.6 Data analysis . . . 58
3 Generalized CAR models 67
3.1 Generalized CAR models . . . 68
3.2 Gaussian GCAR Model . . . 71
3.3 Parameter estimation . . . 72
3.3.1 Maximum likelihood estimation . . . 73
3.3.2 Bayesian estimation . . . 75
3.4 Numerical illustrations of GCAR . . . 78
3.4.1 Results based on ML estimates . . . 80
3.4.2 Results based on Bayes estimates . . . 80
3.5 Comparison of the covariance functions . . . 82
3.6 Data Analysis . . . 85
3.7 Extensions and future work . . . 92
References 93 A Appendix 99 A.1 Lemmas . . . 99
A.2 Posterior density of Gaussian DCAR model . . . 100
A.3 A Bivariate Farlie-Gumbel-Morgenstern Distribution Functions . . . . 103
A.4 Simulation outputs for CAR samples by fitting CAR model . . . 107
A.4.1 MLE with N = 500 . . . 107
A.4.2 Bayesian estimates with N = 10 . . . 115
A.5 Simulation outputs for DCAR samples by fitting DCAR model . . . . 122
A.5.1 MLE with N = 500 . . . 122
A.5.2 Bayesian estimates with 10 data sets . . . 128
A.6 Simulation outputs for CAR samples by fitting DCAR model . . . 134
A.6.1 MLE with N = 500 . . . 134
A.6.2 Bayesian estimates with 10 data sets . . . 141
A.7 Simulation outputs for DCAR samples by fitting CAR model . . . 148
A.7.1 MLE with N = 500 . . . 148
A.7.2 Bayesian estimates with 10 data sets . . . 154
A.8 Outputs from crime rate data analysis of Columbus, OH . . . 160
A.8.1 Basic Data Analysis . . . 160
A.8.2 Prediction and Residual plots . . . 162
A.9 Outputs from the blood lead level of children under 6 in Virginia, 2000 165 A.9.1 Basic Data Analysis . . . 165
List of Tables
1.1 Performance of MLE’s of ρ’s and σ2’s . . . . 22
1.2 Performance of Bayesian estimates ofρ’s and σ2’s . . . . 24
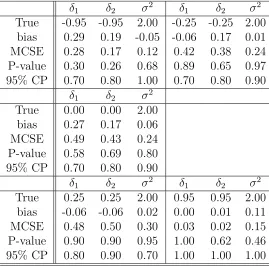
2.1 Performance of MLE’s of δ1’s,δ2’s and σ2’s . . . 45
2.2 Performance of Bayesian estimates ofδ1’s, δ2’s and σ2’s . . . . 47
2.3 Performances of MLE of DCAR model withN = 500 data sets gener-ated from CAR process . . . 50
2.4 Performance of Bayesian estimates of the DCAR model with 10 data sets generated from CAR process . . . 52
2.5 Compariosn of AIC, BIC and DIC between CAR and DCAR models with data sets from CAR process (PCD = Percentage of Correct Decision) 53 2.6 Performances of MLE of CAR model withN = 500 data sets generated from DCAR process . . . 55
2.7 Performance of Bayesian estimates of the DCAR model with 10 data sets generated from CAR process . . . 56
2.8 Compariosn of AIC, BIC and DIC between CAR and DCAR mod-els with data sets from DCAR process (PCD = percentage of correct decisions) . . . 58
2.9 Linear model of house value and income on log transformed crime rate of Columbus OH without outliers (Model 1) . . . 62
2.10 Estimated crime rate of Columbus OH with CAR and DCAR model for the latent spatial process without outliers (Model 2-3) . . . 62
2.11 Mean Squared Predicted Error of Leave-one-out method (MSPE) . . 64
3.1 ML estimates of β and σ2’s and ESE’s . . . . 79
3.2 Performance of MLE’s of GCAR model . . . 81
3.3 Performance of Bayesian estimates of GCAR model . . . 83 3.4 Comparison of ML estimated variance-covariance matrices of CAR and
DCAR process to known variance-covariance matrix of GCAR process 84 3.5 Comparison of ML estimated variance-covariance matrices of GCAR
3.6 Estimated elevated blood lead rates in children under 6 years of age in Virginia, 2000 . . . 90
A.1 Performances of MLE of CAR model based on data sets generated from CAR process with ρ=−0.95 . . . 107 A.2 Performances of MLE of CAR model based on data sets generated from
CAR process with ρ=−0.25 . . . 108 A.3 Performances of MLE of CAR model based on data sets generated from
CAR process with ρ= 0.00 . . . 108 A.4 Performances of MLE of CAR model based on data sets generated from
CAR process with ρ= 0.25 . . . 109 A.5 Performances of MLE of CAR model based on data sets generated from
CAR process with ρ= 0.95 . . . 109 A.6 Performances of Bayes estimates of CAR model based on data sets
generated from CAR process with ρ=−0.95 . . . 115 A.7 Performances of Bayes estimates of CAR model based on data sets
generated from CAR process with ρ=−0.25 . . . 115 A.8 Performances of Bayes estimates of CAR model based on data sets
generated from CAR process with ρ= 0.00 . . . 115 A.9 Performances of Bayes estimates of CAR model based on data sets
generated from CAR process with ρ= 0.25 . . . 116 A.10 Performances of Bayes estimates of CAR model based on data sets
generated from CAR process with ρ= 0.95 . . . 116 A.11 Performances of ML estimates of DCAR model based on data sets
generated from DCAR process withδ1 =−0.95 and δ2 =−0.97 . . . 122 A.12 Performances of ML estimates of DCAR model based on data sets
generated from DCAR process withδ1 =−0.3 and δ2 = 0.95 . . . 122
A.13 Performances of ML estimates of DCAR model based on data sets generated from DCAR process withδ1 =−0.95 and δ2 = 0.97 . . . . 123 A.14 Performances of ML estimates of DCAR model based on data sets
generated from DCAR process withδ1 = 0.95 andδ2 = 0.93 . . . 123 A.15 Performances of Bayes estimates of DCAR model based on data sets
generated from DCAR process withδ1 =−0.95 and δ2 =−0.97 . . . 128
A.16 Performances of Bayes estimates of DCAR model based on data sets generated from DCAR process withδ1 =−0.30 and δ2 = 0.95 . . . . 128 A.17 Performances of Bayes estimates of DCAR model based on data sets
generated from DCAR process withδ1 =−0.95 and δ2 = 0.97 . . . . 129 A.18 Performances of Bayes estimates of DCAR model based on data sets
generated from DCAR process withδ1 = 0.95 andδ2 = 0.93 . . . 129
A.20 Performances of ML estimates of DCAR model based on data sets generated from CAR process with ρ=−0.25 (δ1 =δ2 =ρ) . . . 134
A.21 Performances of ML estimates of DCAR model based on data sets generated from CAR process with ρ= 0.00 (δ1 =δ2 =ρ) . . . 135 A.22 Performances of ML estimates of DCAR model based on data sets
generated from CAR process with ρ= 0.25 (δ1 =δ2 =ρ) . . . 135 A.23 Performances of ML estimates of DCAR model based on data sets
generated from CAR process with ρ= 0.95 (δ1 =δ2 =ρ) . . . 135
A.24 Performances of Bayes estimates of DCAR model based on data sets generated from CAR process with ρ= 0.95 (δ1 =δ2 =ρ) . . . 141 A.25 Performances of Bayes estimates of DCAR model based on data sets
generated from CAR process with ρ=−0.25 (δ1 =δ2 =ρ) . . . 141 A.26 Performances of Bayes estimates of DCAR model based on data sets
generated from CAR process with ρ= 0.00 (δ1 =δ2 =ρ) . . . 141
A.27 Performances of Bayes estimates of DCAR model based on data sets generated from CAR process with ρ= 0.25 (δ1 =δ2 =ρ) . . . 142 A.28 Performances of Bayes estimates of DCAR model based on data sets
generated from CAR process with ρ= 0.95 (δ1 =δ2 =ρ) . . . 142 A.29 Performances of ML estimates of CAR model based on data sets
gen-erated from DCAR process with δ1 = −0.95 and δ2 = −0.97 (True ρ
is mean of trueδ1 and δ2) . . . 148 A.30 Performances of ML estimates of CAR model based on data sets
gen-erated from DCAR process with δ1 = −0.30 and δ2 = 0.95 (True ρ is
mean of true δ1 and δ2) . . . 148 A.31 Performances of ML estimates of CAR model based on data sets
gen-erated from DCAR process with δ1 = −0.95 and δ2 = 0.97 (True ρ is
mean of true δ1 and δ2) . . . 149 A.32 Performances of ML estimates of CAR model based on data sets
gen-erated from DCAR process with δ1 = 0.95 and δ2 = 0.93 (True ρ is mean of true δ1 and δ2) . . . 149 A.33 Performances of Bayes estimates of CAR model based on data sets
generated from DCAR process withδ1 =−0.95 and δ2 =−0.97 . . . 154 A.34 Performances of Bayes estimates of CAR model based on data sets
generated from DCAR process withδ1 =−0.30 and δ2 = 0.95 . . . . 154 A.35 Performances of Bayes estimates of CAR model based on data sets
generated from DCAR process withδ1 =−0.95 and δ2 = 0.97 . . . . 155 A.36 Performances of Bayes estimates of CAR model based on data sets
generated from DCAR process withδ1 = 0.95 andδ2 = 0.93 . . . 155 A.37 Linear model of house value and income on log transformed crime rate
A.38 Linear model of median housing value and poverty on the Freeman-Tukey transformed elevated blood lead levels of children under 6 in Virginia, 2000 . . . 165 A.39 Linear model of median housing value and poverty on the
List of Figures
1.1 The log-transformed crime rate of 49 neighborhoods in Columbus, OH, 1980 that are divided into 5 intervals of each 20% quantiles. . . 5
2.1 The angle (in radian)αij . . . 28
2.2 Correlogram of log transformed crime rate of Columbus OH without outliers . . . 60 2.3 Predicted Log transformed crime rate of Columbus OH (Model 2 and
Model 3: ML method) . . . 64 2.4 Residual plots of log transformed crime rate of Columbus OH (Model
2 and Model 3: ML method) . . . 65
3.1 The Freeman-Tukey transformed rate of children under 6 years of age with elevated blood lead levels into 5 intervals of each 20% quantiles. 87 3.2 Predicted Freeman-Tukey transformed blood lead level of children
un-der 6 in Virginia with GCAR model(Bayes: Model 3.2) . . . 91 3.3 Residual plots of Freeman-Tukey transformed blood lead level of
chil-dren under 6 in Virginia with GCAR model(Bayes: Model 3.2) . . . . 91
A.1 Bivariate Epanechnikov densities with negative directional correlation
α’s. . . 106 A.2 Histograms of estimated parameters of CAR models with Trueρ=−0.95.110 A.3 Histograms of estimated parameters of CAR models with Trueρ=−0.25.111 A.4 Histograms of estimated parameters of CAR models with True ρ= 0. 112 A.5 Histograms of estimated parameters of CAR models with True ρ= 0.25.113 A.6 Histograms of estimated parameters of CAR models with True ρ= 0.95.114 A.7 Posterior density of estimated parameters of CAR models using Bayesian
method with Trueρ=−0.95 . . . 117 A.8 Posterior density of estimated parameters of CAR models using Bayesian
method with Trueρ=−0.25 . . . 118 A.9 Posterior density of estimated parameters of CAR models using Bayesian
A.10 Posterior density of estimated parameters of CAR models using Bayesian method with Trueρ= 0.25 . . . 120 A.11 Posterior density of estimated parameters of CAR models using Bayesian
method with Trueρ= 0.95 . . . 121 A.12 Histograms of estimated parameters of DCAR models with δ1 =−0.95
and δ2 =−0.97. . . 124 A.13 Histograms of estimated parameters of DCAR models with δ1 =−0.30
and δ2 = 0.95. . . 125
A.14 Histograms of estimated parameters of DCAR models with δ1 =−0.95 and δ2 = 0.97. . . 126 A.15 Histograms of estimated parameters of DCAR models with δ1 = 0.95
and δ2 = 0.93. . . 127 A.16 Posterior density of estimated parameters of DCAR models using Bayesian
method with Trueδ1 =−0.95 and δ2 =−0.97 . . . 130
A.17 Posterior density of estimated parameters of DCAR models using Bayesian method with Trueδ1 =−0.30 and δ2 = 0.95 . . . 131 A.18 Posterior density of estimated parameters of CAR models using Bayesian
method with Trueδ1 =−0.95 and δ2 = 0.97 . . . 132 A.19 Posterior density of estimated parameters of CAR models using Bayesian
method with Trueδ1 = 0.95 and δ2 = 0.93 . . . 133
A.20 Histograms of ML estimates of DCAR model based on CAR process samples withρ=−0.95 . . . 136 A.21 Histograms of ML estimates of DCAR model based on CAR process
samples withρ=−0.25 . . . 137 A.22 Histograms of ML estimates of DCAR model based on CAR process
samples withρ= 0.00 . . . 138 A.23 Histograms of ML estimates of DCAR model based on CAR process
samples withρ= 0.25 . . . 139 A.24 Histograms of ML estimates of DCAR model based on CAR process
samples withρ= 0.95 . . . 140 A.25 Posterior density of Bayes estimates of DCAR models using Bayesian
method based on CAR process samples with trueρ=−0.95 . . . 143 A.26 Posterior density of Bayes estimates of DCAR models using Bayesian
method based on CAR process samples with trueρ=−0.25 . . . 144 A.27 Posterior density of Bayes estimates of DCAR models using Bayesian
method based on CAR process samples with trueρ= 0.00 . . . 145 A.28 Posterior density of Bayes estimates of DCAR models using Bayesian
method based on CAR process samples with trueρ= 0.25 . . . 146 A.29 Posterior density of Bayes estimates of DCAR models using Bayesian
method based on CAR process samples with trueρ= 0.95 . . . 147 A.30 Histograms of ML estimates of CAR model based on samples from
A.31 Histograms of ML estimates of CAR model based on samples from DCAR process with δ1 =−0.30 and δ2 = 0.95 . . . 151
A.32 Histograms of estimated parameters of DCAR samples withδ1 =−0.95 and δ2 = 0.97 by fitting CAR model. . . 152 A.33 Histograms of ML estimates of CAR model based on samples from
DCAR process with δ1 = 0.95 and δ2 = 0.93 . . . 153 A.34 Posterior density of Bayes estimates of CAR model based on samples
from DCAR process withδ1 =−0.95 and δ2 =−0.97 . . . 156
A.35 Posterior density of Bayes estimates of CAR model based on samples from DCAR process withδ1 =−0.30 and δ2 = 0.95 . . . 157 A.36 Posterior density of Bayes estimates of CAR model based on samples
from DCAR process withδ1 =−0.95 and δ2 = 0.97 . . . 158 A.37 Posterior density of Bayes estimates of CAR model based on samples
from DCAR process withδ1 = 0.95 andδ2 = 0.93 . . . 159
A.38 Log transformed crime rate of Columbus OH . . . 160 A.39 Log transformed crime rate of Columbus OH without outliers . . . . 161 A.40 Predicted Log transformed crime rate of Columbus OH (Model 1) . . 162 A.41 Residual plots of log transformed crime rate of Columbus OH(Model 1) 162 A.42 Predicted Log transformed crime rate of Columbus OH (Model 2:
Bayesian method) . . . 163 A.43 Residual plots of log transformed crime rate of Columbus OH(Model
2: Bayesian method) . . . 163 A.44 Predicted Log transformed crime rate of Columbus OH (Model 3:
Bayesian method) . . . 164 A.45 Residual plots of log transformed crime rate of Columbus OH(Model
3: Bayesian method) . . . 164 A.46 The Freeman-Tukey transformed blood lead level in Virginia . . . 166 A.47 The Freeman-Tukey transformed blood lead level in Virginia without
outliers . . . 167 A.48 Predicted Freeman-Tukey transformed blood lead level of children
un-der 6 in Virginia with linear model . . . 168 A.49 Residual plots of Freeman-Tukey transformed blood lead level of
chil-dren under 6 in Virginia with linear model . . . 168 A.50 Predicted Freeman-Tukey transformed blood lead level of children
un-der 6 in Virginia with CAR model (MLE: Model 1.1) . . . 169 A.51 Residual plots of Freeman-Tukey transformed blood lead level of
chil-dren under 6 in Virginia with CAR model (MLE: Model 1.1) . . . 169 A.52 Predicted Freeman-Tukey transformed blood lead level of children
un-der 6 in Virginia with CAR model(Bayes: Model 1.2) . . . 170 A.53 Residual plots of Freeman-Tukey transformed blood lead level of
A.54 Predicted Freeman-Tukey transformed blood lead level of children un-der 6 in Virginia with DCAR model (MLE: Model 2.1) . . . 171 A.55 Residual plots of Freeman-Tukey transformed blood lead level of
chil-dren under 6 in Virginia with DCAR model (MLE: Model 2.1) . . . . 171 A.56 Predicted Freeman-Tukey transformed blood lead level of children
un-der 6 in Virginia with DCAR model(Bayes: Model 2.2) . . . 172 A.57 Residual plots of Freeman-Tukey transformed blood lead level of
chil-dren under 6 in Virginia with DCAR model(Bayes: Model 2.2) . . . . 172 A.58 Predicted Freeman-Tukey transformed blood lead level of children
un-der 6 in Virginia with GCAR model (MLE: Model 3.1) . . . 173 A.59 Residual Freeman-Tukey transformed plots of blood lead level of
Chapter 1
Introduction to Conditionally
Autoregressive Models
In many studies, counts or averages over arbitrary regions are observed and spatial
analysis is performed. Counts or averages over arbitrary regions, i.e. regional
sum-mary data, is commonly known as lattice or area data (Cressie, 1993). Given a set of
geographical regions, observations collected over regions near to each other tend to
have similar characteristics as compared to distant regions. In geoscience, this feature
is known as the Tobler’s first law (Miller, 2004). From a statistical perspective, this
feature is attributed to the fact that the autocorrelation between the observations
collected from nearer regions tends to be higher than those that are distant. One of
the main goals of this thesis is to explore such hidden spatial autocorrelation of the
data generating process.
In this thesis, we explore several modeling strategies for lattice data. First,
ex-haustive sub-areas S1, . . . , Sn such that S = ∪n
i=1Si and Si ∩ Sj = ∅. Suppose Yi = Y(Si) denotes some form of aggregate response collected from the area Si.
Letdij =d(Si, Sj) whered(·,·) denotes a “distance” between the centroids of areasSi
and Sj, respectively. To avoid ambiguity, we will assume dii= 0 for i= 1, . . . , n. Let
ρij = Corr(Yi, Yj) denote the autocorrelation between Yi and Yj. Tobler’s first law
asserts us that ρij decrease, as dij increases. In order to model the Yi’s, we usually
consider the model
Yi =µi+ηi+ǫi, (1.1)
whereµi’s denote large-scale variations and are modeled using parametric or
nonpara-metric regression methods,µi =µ(Si,Xi) where Xi’s denote a vector of explanatory
variables specific to area Si. The ηi represents small-scale variations which are
com-monly known as spatial random effects andǫi represents conditionally independently
and identically distributed (iid) measurement errors with mean E[ǫi|X] = 0 and Var[ǫi|X] =σ2
ǫ.
In general, the problem of characterizing the spatial autocorrelation can be split
into two components, the large-scale variation µi and small-scale variation ηi. One
of the goals of this thesis is to develop flexible models for the ηi’s. To begin with,
we assume that ηi’s are conditionally independent of the Xi’s. In other words, the
distribution ofηi’s does not depend on the explanatory variableXi’s. This is certainly
a simplifying assumption which may or may not be appropriate for a given data set.
However, in this thesis we assume that the distribution ofηi’s is independent onXi’s.
In addition, we also assume that given the Xi’s, ηi’s are independent ofǫi’s.
mean and variance. Without much loss of generality, we assume a linear model of
the large-scale variation with parameter βi’s i = 1, . . . , q, i.e. µi = XT
i β, where
β= (β1, . . . , βq)T. Notice that nonlinear functions can be approximated using splines
and polynomials which can be re-written in the form of XT
i β (Wahba, 1977). From
model (1.1) it follows that
E[Y] = Xβ and
Var[Y] = σǫ2I+Σ(ω), (1.2)
where Y = (Y1, . . . , Yn)T is the random vector of responses in a study area S, σ2 ǫ
represents the measurement error variance and ω includes spatial autocorrelation
parameters and other variance components. However, when Yi’s are discrete valued
it can be difficult to use model (1.1), but we can generalize (1.2) using link functions.
Thus, it is often easier to assume a spatial latent process, Z = (Z1, . . . , Zn)T, where
Zi =Z(Si), and to construct models around the moments of Y (Schabenberger and
Gotway, 2005). We assume that, given the latent spatial process Z,
g(E[Y|η]) = Z =Xβ+η
Var[Y|η] = σǫ2I
Cov[Yi, Yj|η] = 0 for Si 6=Sj,
where η = (η1, . . . , ηn)T is as defined in (1.1) and g is a known strictly increasing
link function such thatg(±∞) =±∞. Hence, the marginal moments of Y are easily obtained by using conditional mean and variance as
E[Y|X] = E[g−1(Xβ+η)|X] and
where g−1(Z) = g−1(Z1), . . . , g−1(Zn)T. Notice that when g(x) = x, (1.3) reduces to (1.2).
The latent spatial process Zi’s are usually modeled using a conditionally
autore-gressive (CAR) model (Besag, 1974 and 1975, Cressie and Chan, 1989) and a
simul-taneously autoregressive (SAR) model (Ord, 1975). These models have been widely
used in spatial statistics (Cliff and Ord, 1981, Besag and Kooperberg, 1995 and Wall,
2004). The CAR and SAR models are used to study how a particular region is
in-fluenced by its “neighboring regions”. In practical situations, it is more reasonable
to consider covariates with CAR models to account for variations due to
explana-tory variables. Thus, Zi can be written in the form of mixed model with a fixed
effect linear regression (the large-scale variation) and random effect spatial model
(the small-scale variation). Hence, the models are usually referred to as the mixed
regressive-autoregressive model. To illustrate this, we consider an example of the
crime rates, residential burglaries and vehicle thefts per thousand households in the
neighborhood of 49 neighborhoods in Columbus, OH, in the year of 1980. In this
data, Si’s are the 49 neighborhoods and S is Columbus, OH. Neighborhoods of each Si’s areSj’s that shares common borders. The crime rates,Yi’s are discreted valued,
thus logarithm can be used for a link function ofYi’s. In Figure 1.1, we plot the
log-transformed crime rates that are divided into 5 intervals of each 20% quantiles. In
this figure, darker regions represent higher crime rates. We see that there are higher
crime rates in middle areas of Columbus, OH, and lower crime rates in boundaries.
6 7 8 9 10 11 11 12 13 14 15 5 1 6 2 7 8 4 3 18 10 38 37 39 40 9 36 11 42 41 17 43 19 12
35 32 20
21 31 33 34
45 22 13
44 23
46 30 24
47 49 29 25 16 14
28 48 15 27 26 [−1.72,2.95] (2.95,3.38] (3.38,3.66] (3.66,3.97] (3.97,4.23]
New Columbus OH: log transformation of crime rate per thousand households, 1980
Figure 1.1: The log-transformed crime rate of 49 neighborhoods in Columbus, OH, 1980 that are divided into 5 intervals of each 20% quantiles.
1.1
Markov Random Field
To model the lattice data yi’s, we usually consider the influence of “neighbor”
effect yj’s j 6= i. First, given the set of areas {Si : i = 1, . . . , n}, we define sets
of the associated neighborhoods Ni for i = 1, . . . , n. For example, Ni could be the
set of neighbors that shares boundaries with Si. Let p(y1, . . . , yn) denote the joint
density of the random variables (Y1, . . . , Yn), where Yi = Y(Si) for i = 1, . . . , n.
When the number of areal units is very large, it is generally difficult to conceive a
joint distribution of the Yi’s. Rather, we may prefer to model exclusively with the
lower dimensional conditional distributions. It is well known that given a joint density
would like to reverse the process of identification of the joint distribution from a
set of conditional distributions. In order to derive the joint distribution based on a
given set of full conditionals, we will use the Brook’s Lemma (Brook, 1964), because
it enables us to constructively rebuild the unique joint distribution determined from
full conditionals. In other words, given the full conditional distributions,p(yi |yj, j 6=
i), i= 1, . . . , n, the joint distribution, p(y1, . . . , yn), is uniquely determined using the
following result.
Lemma 1 (Besag, 1974) Brook’s Lemma: Let p(yi) denote the marginal of Yi and
assume that p(yi)>0 for each i, implies that p(y1, . . . , yn)>0(positivity condition).
It then follows that for any two given realization x and y∈Ω, p(y1, . . . , yn)
p(x1, . . . , xn) =
n
Y
i=1
p(yi |y1, . . . , yi−1, xi+1, . . . xn)
p(xi |y1, . . . , yi−1, xi+1, . . . xn)
(1.4)
where Ω ={y:p(y)>0} is the support of y.
From Brook’s Lemma it follows that the joint distribution of theYi’s can be
character-ized by its full conditionals provided the positivity condition is satisfied. Thus we now
focus on modeling the full conditional distributions p(yi |yj, j 6=i) for i= 1, . . . , n.
We, now, review the constraints on the functional form of the conditional
proba-bility distribution for each of yi’s. Given a set of geographical regions, Tobler’s first
law asserts that observations collected over regions near to each other tend to have
similar characteristics as compared to distant regions. It means that the full
condi-tional distribution of Yi’s given Yj =yj for j 6=i can be expressed only with j ∈ Ni,
where Ni is a set of the associated neighborhood indices of Si. This leads to what is
Definition 1 A process {Y1, Y2, . . .} is said to be a Markov random field if for each n = 1,2, . . ., p(yi | yj, j 6= i) = p(yi | yj, j ∈ Ni) for all y ∈ Ω, where
y= (y1, . . . , yn) and Ω is defined in (1.4).
It means that the full conditional of Yi given Yj = yj’s j 6= i depends only on the neighbors {yj : j ∈ Ni}. Now, we want to identify the joint density of (Y1, . . . , Yn)
given a set of conditionals {yi|yj, j ∈ Ni} for i = 1, . . . , n, where the neighborhoods
Ni’s can be any arbitrary neighborhood. The key element is to construct a clique. A clique is any set of sites which either consists of a single site or else in which every
site is a neighbor of every other site in the set (Besag, 1974). The definition of the
a clique is important in the construction of a valid Markov random field. Next, to
identify a joint distribution from a full conditional distribution, we need to consider
what is known as aGibbs distribution.
Definition 2 The joint distribution, p(y), is said to have a Gibbs distribution if
it can be written in the form
p(y) = Y
A∈C
VA(y) (1.5)
where each A is a clique and each VA is a positive function that depends on y only
through the clique A and C is the collection of all cliques.
Therefore, the local specification to determine a joint distribution in the form (1.5)
is referred to as a MRF and the conditional distribution of a MRF is a function only
through a clique ofyi for alli= 1, . . . , n. Based on these definitions, the
Hammersley-Clifford Theorem shows how the conditional probability distributions determine the
Theorem 1 (Besag, 1974) The Hammersley-Clifford Theorem: The process
{Y1, Y2, . . .} is a Markov random field if and only if for each n, the corresponding joint distribution p(y) is a Gibbs distribution, where y= (y1, . . . , yn).
Note that Brook’s lemma characterizes the joint distribution by its full conditional
distributions and the Hammersley-Clifford theorem identifies the joint distribution
from a set of the Gibbs distributions. So, based on the Brook’s Lemma and the
Hammersley-Clifford Theorem, we can construct valid models from sets of conditional
distributions if we choose the neighborhoods to form a clique.
To model any form of responses that are observed in lattice study areas, we are
interested in the modeling of the latent spatial process, Zi’s. In the framework of the
CAR models of Zi’s, we usually assume the Gaussian distribution. Additionally we
also assume that the measurement errors for responses follow iid Gaussian distribution
with mean 0 and varianceσ2
ǫ, i.e.,ǫi iid
∼ N(0, σ2
ǫ), i= 1, . . . , n. Under the linear model
in (1.1), all of these assumptions lead to that the responseYi’s follow a Gaussian CAR
model. It means that for our linear model (1.1), we assume that the full conditionals
follow the Gaussian distributions. However, as we discussed above, we assume the
Gaussian CAR model for the latent spatial processZi’s whereZi =µi+ηi. Then, we
consider models for yi’s that Zi’s are embedded in with the measurement error ǫi’s.
In this thesis, we are interested in the latent spatial processZi’s, therefore, we explore
1.2
Gaussian CAR models
The Gaussian conditionally autoregressive (CAR) models have been widely used
within the Bayesian inferential framework. Especially, Gaussian CAR models have
been used as random effects for the responses with mean E[Yi|Yj, j 6= i, ηi,Xi] = µi+ηi. For the Gaussian CAR model, the joint distribution can be easily identified
from the conditional distributions. Also, another merit of the Gaussian CAR model
is that the Markovian interpretation of their full conditionals is convenient. Now
we discuss some details of the Gaussian CAR models, which will be useful for latter
chapters.
As we discussed, we focus on the modeling of the latent spatial processZi’s instead
of modeling the response directly. Based on Section 1.1, it can be shown that the
latent spatial processZi’s is a stochastic MRF. We now assume each of full conditional
distribution of Zi is Gaussian with mean and variance given by
E[Zi|Zj =zj, j 6=i,Xi] = Xiβ+ n
X
j=1
cij zj −Xjβ
and
Var[Zi|Zj =zjj 6=i,Xi] = σi2, i= 1, . . . , n, (1.6)
where thecij’s denote spatial dependence parameters that are nonzero only ifj ∈ Ni
and cii= 0. Here,Ni is a set of indices for neighbors of Si that are needed to form a
clique. Under these conditional means and variances, Besag (1974) shows that these
conditional distribution generate a valid joint multivariate Gaussian distribution given
by
provided I− C is non-singular, where M = diag(σ2
1, . . . , σ2n) and the elements of
matrix C are spatial dependent parameter cij’s. For ease of notation, we denote the
variance-covariance matrix of the latent spatial process as ΣZ = (I−C)−1M.
To ensure that ΣZ is symmetric, the constraint
cijσi2 =cjiσj2 (1.8)
needs to be satisfied. Clearly, the matrix of spatial dependent parameters,C, has too
many parameters and we need to reduce the number of spatial dependent parameters
so that there are enough degrees of freedom to estimate these parameters. We use a
parametric model, cij =ρwij, with an unknown parameter ρ and a partially known
proximity matrixW, wherewij ≥0 andwii = 0. In literature (Banerjee et al., 2004), there are typically two common choices:
(i) Binary weights: wij = 1 if j ∈ Ni
(ii) Distance: wij = d1α
ij, α >0.
Often, the row sums ofWare standardized to 1 by dividing each entry inWby its row
sum,mi =Pnj=1wij, i.e., ˜wij = wij
mi. Throughout this thesis, we use this standardized
proximity matrix ˜W. Furthermore, we reduce the number of conditional variances by
assuming σ2
i = σ
2
mi. Therefore, under the above assumptions, the variance-covariance
matrix of the latent spatial process reduces to
ΣZ =σ2 D−1−ρW
−1
=σ2 I−ρW˜ −1D (1.9)
where ˜W is a standardized proximity matrix with elements ˜wij’s and Dis a diagonal
matrix with elements 1
and −1, respectively, and hence, if |ρ| < 1, the non-singularity of ΣZ is guaranteed
(Sun et al., 1999).
Now, we consider a marginal model for the responses over a study region in (1.1)
with the first two moments in (1.3). For this linear model of the latent spatial process
and the measurement errors, under the Gaussian assumption, we can easily verify that
the each of full conditional distribution of Yi is
Yi|Yj =yjj 6=i,Xi ∼N Xiβ+ρ n
X
j=1
˜
wij(yj −Xjβ), σ2 mi
+σǫ2 (1.10)
where σ2
ǫ is a measurement variance. Therefore, under the independence assumption
onǫi’s, by the Brook’s Lemma and the Hammersley-Clifford Theorem, it follows that
Y ∼Nn Xβ,ΣY
, (1.11)
where the variance-covariance matrix of a vector of responses, Y is given by
ΣY =ΣZ+σǫ2I=σ2 I−ρW˜
−1
D+σǫ2I. (1.12)
We can easily show thatΣY is symmetric and non-singular if |ρ| ≤1.
We have so far assumed thatY givenZ has a Gaussian distribution but could also
extend this to other distribution with a generalized Gaussian random effect. It means
that based on mixed regressive-autoregressive model, we can use CAR as the spatial
random effects. The next step of a statistical analysis is to estimate unknown
pa-rameters of the model based on the observed responses and the explanatory variables
and to predict future values at unobserved sites. There are two common methods
for the estimation of unknown parameters: (i) Maximum likelihood method and (ii)
Bayesian method. In the next section, we discuss these estimation methods for the
1.3
Parameter estimation
In this section, based on the latent Gaussian CAR spatial process, we describe
parameter estimation using maximum likelihood and Bayesian methods.
1.3.1
Maximum likelihood estimation
When data are modeled as a random sample from a known distribution with
un-known parameters, we consider the likelihood-based estimations. When the exact
likelihood is unavailable, modified methods are used (for example, pseudo-likelihood
estimation (Gong and Samaniego, 1981)). The parameter estimation for spatial
mod-els are described in details in Cressie (1993, Chapter 7) and Haining (1990, Chapter
4). It is known that the ordinary least square (OLS) estimator of the spatial
auto-correlation parameter ρin a CAR model is consistent and it has a closed form given
by
b
ρOLS = bǫ
T
Wbǫ
bǫTWTWbǫ
whereǫbis a vector of OLS residuals,bǫ=y−Xβbandβb = (XTX)−1XTy. Iteratively
re-weighted generalized least square (IRWGLS) method can be used to estimated the
parameters of the CAR model. β is estimated using generalized least squares with
the form, βb(ρ) = XTD−1(I−ρW˜ )X−1XTD−1(I−ρW˜ )y and IRWGLS iterated
between βb(ρ) and ρb(β). Details about the iteratively re-weighted generalized least
square method are described in Section 4.2 in Haining (1990) and Section 5.5.1 in
Schabenberger and Gotway (2005). Nevertheless, among the likelihood-based
the parameters are consistent, asymptotically Gaussian, and asymptotically efficient
estimator (Cressie, 1993). However, the maximum likelihood approach involves some
computational difficulties, because it involves the evaluation of derivatives of the
de-terminant of covariance matrix with unknown parameters.
For the latent spatial process Zi’s, under the joint multivariate Gaussian
distri-bution, the log-likelihood function is given by
ℓ(β, σ2, ρ) = −n
2ln(2πσ
2)−1
2ln|A(ρ) −1D|
− 1
2σ2(Z−Xβ)
TD−1A(ρ)(Z−Xβ) (1.13)
where A(ρ) = I−ρW˜ and D = diag( 1 m1, . . . ,
1
mn). Minimizing (1.13) is usually
straightforward. Thus, assuming A(ρ) is known, the ML estimators of β and σ2 are
d
β(ρ) = XTD−1A(ρ)X−1XTD−1A(ρ)s
[
σ2(ρ) = n−1(s−Xβd(ρ))TD−1A(ρ)(s−Xβd(ρ)).
Substituting back into (1.13), the ML estimator of ρ can be obtained by maximizing
the profile log-likelihood,
ℓ∗(ρ) = −n
2 ln(σ[
2(ρ)) + 1
2ln|A(ρ)|. (1.14)
The above maximization is computationally intensive and requires numerical method.
The Fisher information matrix of MLE’s has a form
I(β, σ2, ρ) =
σ−2XTD−1A(ρ)X 0 0
0T n
2σ−
4 1
2σ−
2tr(G)
0T 1
2σ−2tr(G)
1 2ν
, (1.15)
the Gaussian processes under some regularity conditions (see Cressie, 1993, Section
7.3, for more details). However, in practice, we don’t know the true parameter value,
thus we need to estimate the information matrix.
There are commonly two methods to estimate the Fisher information. One way is
to plug in the MLE’s in the Fisher information in place of unknown parameters. We
call this the expected Fisher information at MLE’s, in our model, that is I(βb,σb2,ρb).
The other method is to use the second derivative of matrix of ℓ(θ), denoted by
▽2 ℓ(θ) , where ℓ(·) is the log-likelihood function and θ is a vector of unknown
parameters. By the law of large numbers, J(θ) = − ▽2 ℓ(θ) well approximates
the expected Fisher information. We call this the observed Fisher information and
use it as another approximation to expected Fisher information. As the true value
of parameters are unknown, thus, we estimate the observed Fisher information at
MLE’s by J(βb,σb2,ρb).
For the aggregated responsesYi’s , we can use the same maximum likelihood (ML)
approaches as for Zi’s. However, instead of ΣZ, we need to use ΣY in (1.12). Thus,
we need to estimate σ2
ǫ in addition to (β, σ2, ρ).
1.3.2
Bayesian estimation
Bayesian inference about the unknown parameters has been considered for the
statistical models for which the likelihood functions are analytically intractable
be-cause of possible high-dimensional parameters or due to the fact that the likelihood
function involves high-dimensional integrations (e.g., when Yi’s are discrete valued).
parameters θ = (θ1, . . . , θq). We assume that Z|θ ∼ f(z|θ), where f(z|θ) is the sampling density of Z given θ. Notice that ℓ(θ) = logf(z|θ). The parameter θ is also considered random and given aprior distribution,π(θ). The Bayesian inference
is based on the conditional distribution of the unknown parametersθgiven the dataz
that reflects the uncertainty aboutθ. This conditional distribution ofθ given Z =z
is known as the posterior distribution. From Bayes’s theorem, the posterior density
is proportional to the product of the likelihood function and the prior density given
by
π(θ|z)∝eℓ(θ)π(θ)
where the normalizing constant is R eℓ(θ)π(θ)dθ−1. However, most often a model
specification leads to intractable posterior density and numerical methods are needed
for inference. One of such numerical methods involves the use of the Markov chain
Monte Carlo (MCMC) methods (Smith and Roberts, 1993 and Tierney, 1994).
Sup-pose that we can construct a Markov chain whose stationary density is the posterior
density π(θ|z) and we can obtain samples from the path of such a Markov chain. Once these chains have been run sufficiently long enough (known as burn-in period),
we can collect samples after the burn-in as approximate samples from the posterior
density π(θ|z).
We consider a class of prior distributions that ensure that the posterior
distribu-tion is proper even when the priors are not. In other words, there are various types
of improper (and hence non-informative) priors which we can consider. However, the
prior distributions may lead to a posterior distribution that does not have an
certain restrictions, for the latent spatial process, there are prior distributions that
lead to proper posterior distribution. The restrictions are that explanatory matrixX
is full rank and the variance-covariance matrix ΣZ is positive definite, (i.e. |ρ| <1).
Then, we consider the following class of prior distributions which leads to proper
posterior distribution.
π(β|σ2, ρ) = 1
π(σ2|ρ) ∝
1
σ2
a+1
e−σb2,a, b >0 and
π(ρ) = 1
2I(|ρ|<1).
With prior distributions that are given above and the likelihood function eℓ(θ), the
joint posterior distribution ofθ = (β, σ2, ρ) is
π(θ|X,z) ∝ eℓ(θ)π(β|σ2, ρ)π(σ2|ρ)π(ρ)
∝ (σ2)−n/2−a−1A(ρ)−1D−1/2
expn− 1 2σ2
(z−Xβ)TD−1A(ρ)(z−Xβ) + 2bo
×I(|ρ|<1). (1.16)
Hence, it follows that the conditional posterior distribution of β given ρ, σ2 is a
Gaussian distribution and that of σ2 given ρ is an inverse gamma distribution as in
a regression model ifρ is known. However,ρ is unknown and there is no closed form
of posterior distribution of ρ, so we use an MCMC algorithm to obtain the posterior
estimates of θ.
We also can consider the conjugate priors forβ andσ2. A conjugate prior ensures
that the posterior belongs to the same class of distributions as the prior. This is a way
value of ρ, the likelihood function is like in a linear regression model with meanXβ
and variance-covariance σ2A(ρ)−1D. Under this circumstance, it is more convenient
to think of a conditionally conjugate prior (givenρ) in three stages according to
β|σ2, ρ ∼ N(β0, σ2B0), a normal distribution with mean β0 and variance σ2B0 σ2|ρ ∼ IG(a0, b0), an inverted Gamma distribution with mean b0
a0−1, (a0 >1)
and variance b
2 0
(a0−1)2(a0−2)
(a0 >2)
ρ = 2φ−1 φ∼Beta(c0, d0).
Then the conditional posterior distribution ofβgivenρ, σ2 is a Gaussian distribution
but with somewhat complicated forms of mean and variance-covariance. Also, the
posterior distribution of σ2 given ρ is an inverse gamma distribution. However, as
we discussed above there is no closed form of the posterior distribution of ρ.
There-fore, we need numerical methods. Details about the Bayesian linear regression are
described in Section 6.4 of Schabenberger and Gotway (2005).
For the Bayesian estimates of the responseYi’s, we can follow the same procedure
of the latent spatial processZi’s. But we need to add one more parameter that is the
measurement error variance σ2
ǫ. We can consider inverse-gamma prior for σǫ2.
For the MCMC method, we need to consider some starting values for each of
the parameters to run the algorithm. In our model of Zi’s, the parameter space
Θ can be defined as Θ = θ|β ∈ Rq, σ2 ∈ (0,∞), ρ ∈ (−1,1) . Within this
pa-rameter space, generally, we choose several starting points for chains and run
paral-lel chains. Then as we discussed, after burn-in period, we collect simulated values
from the Markov chains. For instance if θ(1), . . . ,θ(N) denote the samples generated
that N1 PNl=1g(θ(l)) → E[g(θ)|Z]. Usually, the estimate of posterior mean provides the marginal estimates of the parameters. However, if the posterior distribution is
skewed, the posterior median provides more robust estimate. Also, for an interval
estimate of the parameter, we can consider a 95% equal tail credible set (CS) given
by the 2.5th and 97.5th quantiles of the sampled values.
To illustrate the performance of Gaussian CAR model, we consider a simulation
study. By varing the spatial dependent parameter ρ in (−1,1), we explore the
per-formance of ML and Bayes estimators.
1.4
A simulation study
In order to study the finite sample performance of ML and Bayes estimators, we
conduct a simulation study. In this simulation study, we focus on the behavior of
the Gaussian latent spatial process Z = (Z1, . . . , Zn) in (1.7). Mardia and Marshall
(1984) conducted a simulation study with 10 ×10 unit spacing lattice, based on samples generated from normal distribution with mean zero and a spherical covariance
model. The sampling distribution of the MLE’s of the parameters were studies based
300 Monte Carlo samples. Following a similar setup, for our simulation study, we
selected an 15×15 unit spacing lattice and generated samplesZi’s from a multivariate
normal distribution with mean Xβ and the variance-covariance σ2A(ρ)−1D, where
A(ρ) = I−ρW˜. For the explanatory variable matrix X, we use the coordinate of each locations and it can be generated by usinggrffunction ingeoRpackage (Ribeiro
True values: β= (β0, β1, β2)T = (1,−1,2)T and σ2 = 2.
Also, to study the sampling distribution of ρ, we consider five different ρ’s as given
below:
Case 1: ρ=−0.95: negative boundary point Case 2: ρ=−0.25: negative inner point
Case 3: ρ= 0.00: independence with neighbors
Case 4: ρ= 0.25: positive inner point
Case 5: ρ= 0.95: positive boundary point.
For each case, we compare the ML and Bayesian estimates.
With generated samples, we estimated parameters using the ML and Bayesian
methods. Following the simulation study of Mardia and Marshall (1984), for the
normal approximation of ML estimates, we repeat the data generation 500 times. In
order to maintain the restriction |ρ| < 1, we use the “L-BFGS-B” method (Byrd, et al., 1995) within the optim function to maximize the log-likelihood. We also
extract the Hessian matrix to estimate the information matrix. In other words, we
use observed Fisher information matrix to obtain the standard errors (s.e.) of θ.
It has been shown by Efron and Hinkley (1978) that use of the observed Fisher
information matrix results into more efficient estimator than the use of the expected
Fisher information matrix. It is also computationally easier to directly use the Hessian
matrix from the output of theoptimfunction. For the Bayesian estimates, we consider
three sets of initial values and run three parallel chains. We use a burn-in ofB = 1000
for each of the three chains followed by M = 2000 iterations. These scheme produces
With the ML and Bayesian estimates, we also compute the Monte Carlo standard
errors and nominal coverage probabilities based on 95% interval estimator. Let θib
represent the estimate of real-valued parameter θ for ith generated data, then we
define
Bias = ¯bθ−θ0
MCSE =
v u u
t 1
N −1
N
X
i=1
b
θi−¯θb
2
ESE = 1
N N
X
i=1
q
s.e.(θbi)
P-Value = p-value of testing H0 :θ=θ0 based on θ1, . . . ,b θnb
95% CP = 1
N N
X
i=1
I(θ0 ∈95%C.I.) (1.17)
whereθ0 is the true value of parameter,¯θb= N1 PNi=1θib denoted by Ave (in the Table),
J(θb) is the observed information at θ = θb. Notice that for frequentiest method
s.e.(θib) =
q
I(θib)−1 and 95% C.I.= θib ± 1.96s.e.(θib) whereas for Bayesian method
s.e.(θib) = sdi(θ|z) and 95% C.I.= 2.5% and 97.5% quantile ofθ given z.
1.4.1
Results based on ML estimates
The main results from the simulation are summarized numerically by using
ta-bles and graphically by using figures. First, from the Table 1.1, notice that there
are few missing estimates of the estimated standard errors (ESE) based on the
ob-served Fisher information matrix. This is due to the fact thatRhas a functionderiv
that numerically computes the derivative of complicated expressions which can lead
Fisher information is used for the estimation of the Fisher information with the
sec-ond derivative of the log-likelihood function.
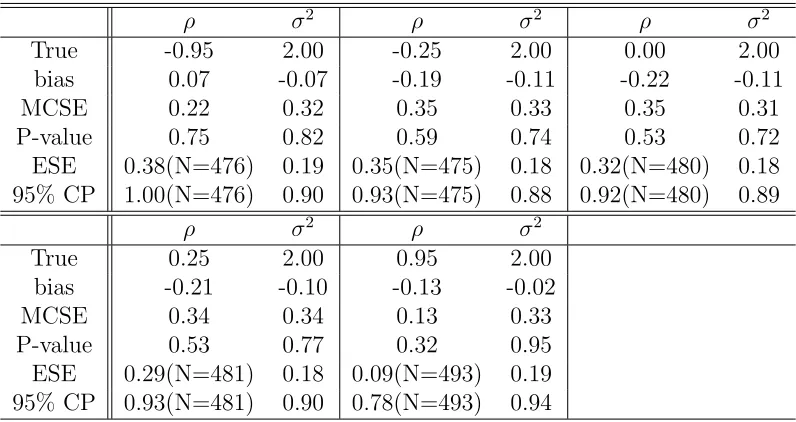
From the Table 1.1, we observe that for all cases the estimated values are not
sig-nificantly different from the true value at 5% level. In other words, for all five choices
of ρ, there are no significant biases (all p-values are bigger than 0.32). Asymptotic
variance (ESE’s) of ρ is a good approximation to finite sample variance when the
spatial dependence is weak such as in Cases 2,3, and 4, because the ESE’s are close to
MCSE’s. For Case 1, with 476 estimated variances for ρ, ESE=0.38 and the nominal
95% CP is away from 0.95. In this case, MLE tends to estimate the true value with
high uncertainty. From the Figures in Appendix A.4.1, we observe out that the
esti-mates ofρ’s for boundary values are skewed to right and left for the negative extreme
value and the positive extreme value, respectively (Case 1 and Case 5). But for Cases
2,3, and 4 of ρ, the histograms are appear symmetric.
For all cases, the biases of MLE’s of σ2 tend to be negative. However, those
negative biases are not significant at 5% level. Furthermore, asymptotic variances
(ESE’s) are almost half of MCSE’s suggesting that asymptotic s.e.’s of σ2 generally
underestimate the finite sample uncertainty. In this cases, MLE’s of σ2’s are
rea-sonable estimates even though there seems to be some degree of underestimation.
From the figures in Appendix A.4.1, we observe that the histogram of MLE’s of σ2
is almost symmetric except for some small values. Therefore, the MLE’s of σ2 agree
quite closely to the large sample Gaussian approximation.
For the estimation ofβ’s, the estimates did not display significant bias with small
Table 1.1: Performance of MLE’s of ρ’s and σ2’s
ρ σ2 ρ σ2 ρ σ2
True -0.95 2.00 -0.25 2.00 0.00 2.00
bias 0.07 -0.07 -0.19 -0.11 -0.22 -0.11
MCSE 0.22 0.32 0.35 0.33 0.35 0.31
P-value 0.75 0.82 0.59 0.74 0.53 0.72
ESE 0.38(N=476) 0.19 0.35(N=475) 0.18 0.32(N=480) 0.18 95% CP 1.00(N=476) 0.90 0.93(N=475) 0.88 0.92(N=480) 0.89
ρ σ2 ρ σ2
True 0.25 2.00 0.95 2.00
bias -0.21 -0.10 -0.13 -0.02
MCSE 0.34 0.34 0.13 0.33
P-value 0.53 0.77 0.32 0.95
ESE 0.29(N=481) 0.18 0.09(N=493) 0.19 95% CP 0.93(N=481) 0.90 0.78(N=493) 0.94
the histograms of estimates displayed in Appendix (Figures A.2 through A.6), we
observe that the finite sample performance of MLE’s of β’s are close to the large
sample Gaussian approximation.
1.4.2
Results based on Bayes estimates
For this simulation study using a Bayesian method, we repeat only 10 times
(N = 10) for sample generation and for the estimation, because it is time consuming
to run more Monte Carlo runs involving MCMC methods. As we discussed in
Sec-tion 1.3.2, the posterior median is considered as Bayes estimates because it provides
more robust estimate than the posterior mean. Also, for an interval estimate of the
parameter, we consider a 95% equal tail credible set (CS) of the sampled values.
From the Table 1.2, we observe that for all estimated parameters, p-values are
estimates. For all cases, the biases ofρ are slightly positive, but these are not
signifi-cant (all p-values are bigger than 0.18). For Case 2, the nominal 95% CP is away from
0.95 indicating that Bayesian estimation tends to estimate the true value with high
uncertainty. For Case 5, bias is small and MCSE is smaller than any other cases with
1.00 of the nominal 95% CP. Thus, Bayesian estimation tends to estimate the true
value quite well when the true value of ρ is in positive boundary. From the Figures
in Appendix A.4.2, we find out that the posterior distribution of ρ’s for boundary
values are skewed to right and left for Case1 and Case 5, respectively. But for Cases
2,3, and 4 of ρ, the posterior distributions are quite symmetric.
For all cases except Case 1, the biases of Bayesian estimates of σ2 tend to be
positive. This result is a bit different compared to that of MLE’s, because the biases
of MLE’s of σ2 tend to be negative for all cases. However, biases of all cases are not
significant because all p-values are bigger than 0.5 for the Bayesian estimates of σ2.
The nominal 95% CP’s are quite high for all cases which might be an artifact that
N = 10 only. From the figures in Appendix A.4.2, we observe that the posterior
distribution of σ2 is almost symmetric except some small values.
For the estimation ofβ’s, the estimates do not display significant bias at 5% level.
For Case 1,2 3 and 4, small MCSE are observed with quite high 95% CP’s. However,
for Case 5, MCSE of β0 is much bigger than any other cases with 1 of 95% CP’s.
Thus, in this case, Bayesian estimate of β0 tends to estimate the true value with
high uncertainty. From the posterior distribution displayed in Appendix (Figures A.7
through A.11), we observe that posterior distribution ofβ’s are symmetric. However,
Table 1.2: Performance of Bayesian estimates of ρ’s and σ2’s
ρ σ2 ρ σ2 ρ σ2
True -0.95 2.00 -0.25 2.00 0.00 2.00 bias 0.15 -0.06 0.02 0.03 0.33 0.08 MCSE 0.19 0.12 0.29 0.24 0.48 0.22 P-value 0.43 0.62 0.95 0.90 0.49 0.72 95% CP 0.80 1.00 1.00 0.90 0.70 0.90
ρ σ2 ρ σ2
True 0.25 2.00 0.95 2.00 bias 0.01 0.06 0.04 0.10
MCSE 0.43 0.31 0.03 0.15
P-value 0.98 0.85 0.18 0.50 95% CP 0.90 0.70 1.00 1.00
1.5
Extensions of CAR model
Gaussian CAR models have been used as random effects within generalized mixed
effects models to explain the effect of neighbors. As we discussed above, Gaussian
CAR model has merits that the joint distribution is multivariate Gaussian. So, the
ML and the Bayesian estimations are easily obtained. One limitation of the CAR
model is that it assumes that the effects of neighbors are the same in any direction.
However, the magnitude of autocorrelation might be different for different directions.
Thus, there is need to extend a regular CAR model to a new CAR model that
cap-tures spatial anisotropy. We will call this new model as directional CAR (DCAR)
model and is described in Chapter 2. In Chapter 3, we provide a further
general-ization of the DCAR model which determines the neighborhoods adaptively using
a smooth function of the inter-distances and inter-angles between the regions. We
will call this model as the generalized CAR (GCAR) model. We derive the ML
we establish consistency and asymptotic normality of the MLE’s for DCAR model
under mild regularity conditions. In order to validate the finite sample performance
of the MLE’s and Bayes estimates, we conduct a thorough simulation study in both
Chapters 2 and 3. Finally, real data sets are used to illustrate the implementation of
the proposed methodologies. Additional results are presented in an extended version
Chapter 2
Directional CAR models
In a regular CAR model, we assume that the conditional effects of neighbors are
the same in any direction which is captured by the spatial effect parameter ρ. In
this chapter, we develop an extension of a regular CAR model using different weights
for different directions. In other words, different weights are given to neighbors in
different directions. We call this model as the directional CAR (DCAR) model.
In general, as we discussed in Chapter 1, we usually consider the model for the
aggregated responses as
Yi =µi+ηi+ǫi (2.1)
whereµi’s denote large-scale variations,ηi represents small-scale variations (or spatial
random effects) and ǫi represents iid measurement errors. We discussed details about
this model in the previous chapter and we note that it is often easier to assume a
spatial latent process, Z = (Z1, . . . , Zn), where Zi = Z(Si) = µi +ηi, and then to
construct models with the moments ofY = (Y1, . . . , Yn). In Chapter 1, a regular CAR
a regular omni-directional CAR model, we consider the DCAR model to model the
spatial autocorrelation.
2.1
Directional CAR models
In order to model the latent spatial process Zi’s with a DCAR model, first, we
need to consider how to define neighbor structure that depends on the directions
from a centroid of each sub-regions. For illustrations and notation simplicity assume
that Si are regions in a two-dimensional space, i.e., Si ⊂R2, ∀i.However, the model
and associated statistical inference presented in this thesis can easily be extended to
higher dimensional data. Let si = (s1i, s2i) be a centroid of the sub-region Si, where
s1i corresponds to the horizontal coordinate (x-coordinate) ands2i corresponds to the
vertical coordinate (y-coordinate). The angle (in radian) betweenSi andSj is defined
as
αij =α(Si, Sj) =
tan−1(s2j−s2i
s1j−s1i)
if s2j −s2i ≥0
− π−tan−1(s2j−s2i
s1j−s1i)
if s2j −s2i <0
for all j 6=i. We consider directions of neighbors from the centroid of subregionSi’s. For example, in Figure 2.1,Sj is in the north-east region of Si and henceα(Si, Sj) is
in [0,π2). Let Ni represents a set of indexes of neighborhoods for the i-th region Si
S_i S_j
alpha(S_i,S_j)
Figure 2.1: The angle (in radian) αij
can now create new sub-regions, for each i, as follows:
Ni1 = {j :j ∈ Ni,0≤αij < π
2}, Ni2 = {j :j ∈ Ni,
π
2 ≤αij < π}, Ni3 = {j :j ∈ Ni, π≤αij <
3 2π}, Ni4 = {j :j ∈ Ni,
3
2π ≤αij <2π}.
In a regular CAR model, Ni were chosen to form a clique for i= 1, . . . , n. However,
if j ∈ Ni1 then we should ensure that i ∈ Nj3. For the above set of four
sub-neighborhoods, we can combine each pair of the diagonally opposite neighborhoods
to form a new neighborhood, i.e., we can createN∗
i1 =Ni1SNi3, andNi2∗ =Ni2SNi4
for i = 1, . . . , n. Now it is easy to check that if j ∈ N∗
i1, then i ∈ Nj1∗. Thus, we
redefine two subsets of Ni’s as follows:
Ni1∗ = {j :j ∈ Ni and (0≤αij < π
2 orπ ≤αij < 3 2π)}
Ni2∗ = {j :j ∈ Ni and ( π
2 ≤αij < π or 3
2π ≤αij <2π)}. (2.2) Then, each ofN∗
i1 andNi2∗ forms a clique and thatNi =Ni1∗
S
N∗
i2. The above scheme
of creating new neighborhoods based on the inter-angles,αij’s can be extended beyond
But for the rest of the article we restrict our attention to case with only two
sub-neighborhoods as described in (2.2).
Based on subsets of the associated neighborhoods, N∗
i1 and Ni2∗, we can construct
directional weight matrices W(1) = ((w(1)
ij )) and W(2) = ((w (2)
ij )), respectively. For
instance, we can define the directional proximity matrices as w(1)ij = 1 if j ∈ N∗
i1 and
w(2)ij = 1 if j ∈ N∗
i2. Notice that W = W(1) +W(2) reproduces the commonly used
proximity matrix based on distances as in a regular CAR model defined in Section
1.2.
Now, we construct a regular DCAR model for the latent spatial processZi’s. Like
a regular CAR model, generally we can model the latent spatial DCAR process using
E[Zi|Zj =zjj 6=i,Xi] = µ(Xi,β) + n
X
j=1
c(1)ij zj −Xjβ
+
n
X
j=1
c(2)ij zj−Xjβ
Var[Zi|Zj =zjj 6=i,Xi] = σi2
for i = 1, . . . , n, the c(k)ij denote directional spatial dependence parameters that are
nonzero only if j ∈ N∗
ik and c
(k)
ii = 0 for k = 1,2. Here, for the large-scale trend,
without loss of generality we assume µi =Xiβ whereX is an arbitrary matrix andβ
is a vector of large-scale parameters like what we considered in previous chapter. As
we discussed in Section 1.1, we construct a DCAR model with the lower dimensional
conditional distributions . For ease of estimation and inference, we reduce the number
of spatial dependent parameters through the use of a parametric modelc(k)ij =δkw(k)ij
with directional spatial parametersδ1 andδ2, and directional proximity matricesW(1)
and W(2) wherew(k)
ij ≥0 and w (k)
ii = 0 fork = 1,2. Also, because W=W(1)+W(2),
we can reduce the number of conditional variances by assuming σ2
i = σ
2
mi where
Therefore, we model conditional distribution of directional CAR model for the latent
spatial process Zi with spatial parameterδ = (δ1, δ2) using
E[Zi|Zj =zjj 6=i,Xi] = Xiβ+δ1 n
X
j=1
wij(1) zj −Xjβ
+δ2 n
X
j=1
wij(2) zj −Xjβ
Var[Zi|Zj =zjj 6=i,Xi] = σ2
mi, (2.3)
for i = 1, . . . , n. As in a regular CAR model we assume that ηi’s do not depend on
X.
The joint distribution based on a given set of full conditional distributions can be
derived using the Brook’s Lemma(Brook, 1964), provided the positivity condition is
satisfied. For the DCAR model, by construction it follows that each of N∗
i1 and Ni2∗
defined in (2.2) forms a clique fori= 1, . . . , n. Thus, it follows from the
Hammersley-Clifford Theorem that the latent spatial process Zi of a DCAR model exists and is a
Markov Random Field (MRF). We now derive the exact joint distribution of theZi’s
by assuming that each of the full conditional distribution is a Gaussian distribution.
2.2
Gaussian DCAR models
The Gaussian CAR model has been used widely for the latent spatial process
Zi as we discussed in Section 1.2. In this section, we study merits of the Gaussian
DCAR model. As we discussed in previous section, the joint distribution can be easily
derived from the conditional distributions by using Brook’s Lemma.
Assume that the full conditional distributions of Zi’s are given as
Zi|Zj =zj, j 6=i,xi ∼N
xT
i β+
2
X
k=1 δk
n
X
j=1
wij(k) zj−xTjβ
, σ 2
mi
where w(k)ij for k = 1,2 are the directional weights. It can be shown that this latent
spatial DCAR process Zi’s is a MRF. Thus, by Brook’s lemma and the
Hammersley-Clifford Theorem, it follows that the finite dimensional joint distribution is a
multi-variate Gaussian distribution given by
Z ∼Nn Xβ, σ2(I−δ1W(1)−δ2W(2))−1D
, (2.5)
where Z = (Z1, . . . , Zn)T and D = diag( 1 m1, . . . ,
1
mn). For simplicity, we denote the
variance-covariance matrix of DCAR process by Σ∗Z ≡σ2(I−δ1W(1)−δ2W(2))−1D.
For a proper Gaussian model, the variance-covariance matrixΣ∗Z is required to be positive definite. If we use the standardized directional proximity matrices ˜W(k) =
(( ˜wij(k)= w
(k)
ij
mi )), k= 1,2, it can be easily shown that Σ ∗
Z is symmetric.
Next, we derive a sufficient condition that ensures that the variance-covariance
matrix Σ∗Z is non-singular. As D is a diagonal matrix, we only require suitable conditions on ˜W(k) and onδk for k = 1,2. The following results provides a sufficient
condition:
Lemma 2 Let A = I− PKk=1δkW˜ (k) be an n ×n matrix where PK
k=1W˜ (k) is a
symmetric matrix with non-negative entries, diagonal 0 and each row sums to unity.
If max1≤k≤K|δk|<1, then the matrix A is positive definite.
Proof: Let aij denote the (i, j)-th element of A. Notice that for each i= 1,2. . . , n,
we have
X
j6=i
|aij|=X
j6=i
|
K
X
k=1
δkw(k)ij | ≤
K
X
k=1
|δk|X
j6=i
w(k)ij < K
X
k=1
X
j6=i
w(k)ij = 1 =aii
Hence it follows from Lemma 3 that A is positive definite. Based on Lemma 2