Procedia Engineering 29 (2012) 189 – 193 1877-7058 © 2011 Published by Elsevier Ltd. doi:10.1016/j.proeng.2011.12.693 Procedia Engineering 00 (2011) 000–000
Procedia
Engineering
www.elsevier.com/locate/procedia2012 International Workshop on Information and Electronics Engineering (IWIEE)
A Trajectory Tracking Method for Welding Manipulator
Based on Fuzzy Gauss Function Neural Network
CAO Cheng
a, WU Baoqiang
a*,
baCenter of educational technology and engineering training, Hunan University,410082,Changsha China bCollege of electrical and informational engineering, Hunan University,410082,Changsha China
Abstract
In this paper,a trajtory tracking method based on the combination of fuzzy control and neural network control is proposed.We use the gauss function as fuzzy membership function and realize the fuzzy reasoning by neural net- work.Then a robotic controller using the method is designed for welding manipulator trajectory tracking.Simulation results illustrate the performace of the proposed controller.
© 2011 Published by Elsevier Ltd. Selection and/or peer-review under responsibility of [name organizer] Keywords: fuzzy gauss function; neural network;welding manipulator;trajectory tracking;
1. Introduction
Recently,with the development and application of the robot technology, the robots are more and more widely used in industrial and agricultural production. In the advanced manufacturing field, the wide appli- cation of welding automation, makes it becomes a frontier research subject that the technology of trajectory tracking control used in the welding manipulator[1].However, the robot is a nonlinear, strong coupling of multivariable systems. In the control process, because of its existence friction, load change and so on, there are a lot of uncertainty should be dealt with. The traditional robot control methods usually based on the accurate mathematical model.But in fact it is difficult to give a precise mathematical model to describe those uncertain factors, so the control effect would not be satisfactory.
The development of artificial intelligence provides new ideas for the solution of the robot control problems such as fuzzy control[2], neural networks[3], etc. Many efforts have been made in developing control schemes to achieve the precise tracking control of robot manipulators[4]. The combination of
* Corresponding author. Tel.: +86-13974856015;
E-mail address: [email protected]. Open access under CC BY-NC-ND license.
2 Author name / Procedia Engineering 00 (2011) 000–000
fuzzy control and neural network become the focus research in the field of robot control.By using the neural network nonlinear mapping, learning ability to adjust the fuzzy control, makes it has some of the adaptive ability,meanwhile,the neural network obtains the capability of fuzzy reasoning,which can be used to solve the complex nonlinear problem in robot control schemes.
In this work, a kind of fuzzy neural network controller based on gauss function[5] as membership func- tion is designed for the problem of trajectory tracking control on a two-degree welding manipulator. Illustrative simulation studies highlight its performance.
2. Robot model establishment and the control system design
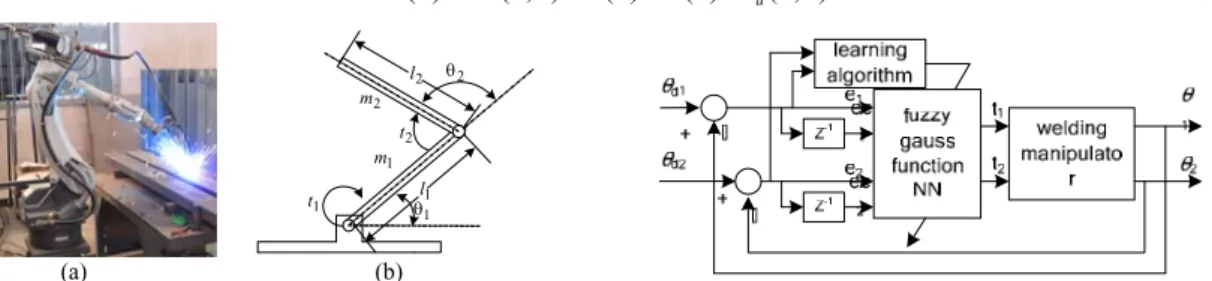
The manipulator (Fig. 1(a)) can be considered as an open chain linked,rigid, many linkage mechanism as shown in Fig.1(b). Here a two-joint manipulator is given as an example, with its mathematical model.The dynamic equation of the two-degree welding manipulator is expressed as follows:
τ θ θ θ θ θ θ θ θ) + ( , )+ ( )+ ( )+ ( , )=
( && V & G F & Td &
M (1)
Fig. 1.A two degree-of-freedom welding manipulator and its structure Fig.2. Fuzzy gauss function NN controller system WhereM(θ)is the positive definite inertia matrix, V(θ,θ&)includes coriolis and centripetal forces, G(θ) is
the gravitaional force,F(θ&)is static and dynamic friction terms, (θ,θ&) d
T represents an additive bounded
disturbance due to load variation and/or modeling error and
τ
is a control vector of torque.And[ ]
t t T2 1 = τ ,
[
]
T 2 1 θ θ θ= ,[
]
T 2 1 θ θθ&= & &
[
]
T2
1 θ
θ
θ&&= && && .The different parameters are: manipulator link length l1,l2(m),link mass m1,m2(kg),the acceleration due to gravity g=9.8(m/s2),and short-hand notaiton si=sinθi,ci=cosθi,
) cos(i j j
i
c = θ+θ .The parameters for the equation of motion are as follows: ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ + + + + + = 2 2 2 2 2 1 2 2 2 2 2 2 1 2 2 2 2 2 2 1 2 2 2 1 2 2 1 1 ( 2 ) ) ( l m c l l m l m c l l m l m c l l l l m l m Mθ ; ⎥ ⎦ ⎤ ⎢ ⎣ ⎡− − = 2 1 2 2 1 2 2 1 2 2 1 2 2 2 2 2 1 2 2 ) , ( θ θ θ θ θ
θ & & & &&
s l l m s l l m s l l m V ; ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ + + = 12 2 2 1 1 2 1 12 2 2 ( ) ) ( gc l m gc l m m gc l m Gθ .
The structure of the proposed controller for the mathematical model is illustrated in Fig. 2,where
1
d
θ andθd2are the desired position of the two joints,θ1andθ2are the two joints’ actual position, e1ande2 represents the position error,ec1andec2are the corresponding error rate.
3. Fuzzy Gauss Function NN Controller
3.1. The structure of fuzzy gauss function neural network
This kind of fuzzy neural network has the learning ability of neural network and human similarly fuzzy reasoning capability.In this work, a Five-layer fuzzy neural network system is adopted and shown in Fig.3. Using xki, (l)
i k
O to denote the input and output of the ith node in the lth layer separately, the signal propagation and the operation functions of the nodes in each layer are introduced as follows.
Layer 1— Input Layer: The nodes introduce input variables into the network. 1 t 2 t 1 m 2 m 1 l 2 l 1 θ 2 θ (a) (b)
Fig.3. Fuzzy gauss function NN for robotic system
ki l i k x O()= ,k=1,2; =1,2 i (2)
Layer 2:In this layer, each node represents a fuzzy language value with the characteristics of the membership function,and the output function of which is as follows.
) ) ( exp( 2 2 ) 1 ( ) 2 ( kij kij ki kij b a O Q = − − ,k=1,2;i=1,2; j=1,2,L,7 (3)
Where akij represents the center value of the gauss function, kij
b represents the width of the gauss function.
Layer 3:The function of this layer is to complete the fuzzy rules of fuzzification operation,using the multiplication in this paper. The output function of this layer is as follows. ) 2 ( 2 ) 2 ( 1 ) 3 ( j k j k kij O O O = • ,k=1,2;i=1,2;j=1,2,L,7 (4) Layer 4: The function of this layer is to complete
defuzzification with judging by the average weight values, the input and output function of which are as follows.
∑
= = 7 1 , ) 3 ( ) 3 ( ) 4 ( ( ) j i kij kij k O I ω ;∑
= = 7 1 , ) 3 ( ) 4 ( ) 4 ( j i kij k k O I O ,k=1,2 (5) Where (3) kijω represents the weight value.
Layer 5: This layer node represents the coupling between the whole robot joints,and its output function as follows.
∑
= = 2 1 ) 4 ( ) 4 ( k kl k i O y ω ,l=1,2 (6) Where (4) klω represents the weight value. 3.2. The learning algorithm of the network
In this work, the BP algorithm is used to learn in the neural network,and the whole process is divided into off-line learning stage and on-line learning stage.Firstly, on the off-line learning stage,the sample data is taken from the ordinary fuzzy controller,then adjusts ωkij(3),ωkl(4),akijandbkij off-line.Now define the objective function as follows:
2 2 1 ) ( 2 1
∑
= − = l l d l y y J (7) where yldrepresents the output of the sample, ylis the the actual output. Then we get:) 4 ( ) 4 ( ) 4 ( ( ld l) k kl l l kl O y y y y J J =− − • ∂ ∂ • ∂ ∂ = ∂ ∂
ω
ω
,k=1,2;l=1,2 (8) ) 4 ( 1 ) 4 ( ) 4 ((
1
)
(
)
kl l kl kly
t
t
ω
η
ω
ω
∂
∂
−
=
+
,k=1,2;l=1,2 (9)4 Author name / Procedia Engineering 00 (2011) 000–000
∑
∑
∑
= = ⎥⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ − − = ∂ ∂ ∂ ∂ ∂ ∂ = ∂ ∂ 2 1 , ) 3 ( ) 2 ( ) 4 ( 2 1 (3) ) 4 ( ) 4 ( ) 3 ( ) ( ) ( l j i kij k kl l d l l kl k k l l kl O O y y O O y y J J ω ω ω ,k=1,2;i=1,2,L,7 (10) ) 3 ( 2 ) 3 ( ) 3 ( ( 1) ( ) kij kij kij J t t ω η ω ω ∂ ∂ − = + ,k=1,2;i=1,2,L,7;j=1,2,L,7 (11)∑ ∑
∑
∑ ∑
= = = = ⎥⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ − − − − = ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ = ∂ ∂ 2 1 7 1 21 1 1 ) 2 ( 2 , ) 3 ( ) 4 ( ) 3 ( ) 4 ( 2 1 7 1 1 ) 2 ( 1 ) 2 ( 1 ) 3 ( ) 3 ( ) 4 ( ) 4 ( 1 ) ( 2 ) ( l j k i i k d k j k j i kij k kij kl l d l l j k i i k i k kij kij k k l l i k b a x O O O y y a O O O O O O y y J a J ω ω , 2 , 1 = k ;i=1,2,L,7 (12)∑ ∑
∑
∑ ∑
= = = = ⎥⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ − − − − = ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ = ∂ ∂ 2 1 7 1 22 2 2 ) 2 ( 1 , ) 3 ( ) 4 ( ) 3 ( ) 4 ( 2 1 7 1 2 ) 2 ( 2 ) 2 ( 2 ) 3 ( ) 3 ( ) 4 ( ) 4 ( 2 ) ( 2 ) ( l j k i i k d k j k j i kij k kij kl l d l l j k i i k i k kij kij k k l l i k b a x O O O y y a O O O O O O y y J a J ω ω , 2 , 1 = k ;i=1,2,L,7 (13) kij kij kij a J t a t a ∂ ∂ − = +1) ( ) 3 ( η ,k=1,2;i=1,2;j=1,2,L,7 (14)∑ ∑
∑
∑ ∑
= = = = ⎥⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ − − − − = ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ = ∂ ∂ 2 1 7 1 21 2 1 1 ) 2 ( 2 , ) 3 ( ) 4 ( ) 3 ( ) 4 ( 2 1 7 1 1 ) 2 ( 1 ) 2 ( 1 ) 3 ( ) 3 ( ) 4 ( ) 4 ( 1 ) ( ) ( 2 ) ( l j k i i k d k j k j i kij k kij kl l d l l j k i i k i k kij kij k k l l i k b a x O O O y y a O O O O O O y y J b J ω ω , 2 , 1 = k ;i=1,2,L,7 (15)∑ ∑
∑
∑ ∑
= = = = ⎥⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ − − − − = ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ = ∂ ∂ 2 1 7 1 22 2 2 2 ) 2 ( 1 , ) 3 ( ) 4 ( ) 3 ( ) 4 ( 2 1 7 1 2 ) 2 ( 2 ) 2 ( 2 ) 3 ( ) 3 ( ) 4 ( ) 4 ( 2 ) ( ) ( 2 ) ( l j k i i k d k j k j i kij k kij kl l d l l j k i i k i k kij kij k k l l i k b a x O O O y y a O O O O O O y y J b J ω ω , 2 , 1 = k ;i=1,2,L,7 (16) kij kij kij b J t b t b ∂ ∂ − = +1) ( ) 4 ( η ,k=1,2;i=1,2; j=1,2,L,7 (17) By virtue of (9) and (11),the weight values (4)kl
ω and (4)
kij
ω can be adjusted on-line.In (12),(13),(15) and
(16), d k
y1 and d k
y2 represents the sample input,and according to (14) and (17),akij and bkij can be adjusted
on-line too,in which η1,η2,η3,andη4is the learning rate.
On the online learning stage, the parameters obtained on the off-line stage are input into the network,and the target error is defined as follows:
2 2 1 ) ( 2 1
∑
= − = m m d m J θ θ (18) It is important to note that, on this stage,similarly as off-line learning, it can be on-line learning and fine-adjusts the parameters of the network4. Simulation Results
The whole experiment system includes the host computer, the local robot controller and a two degree-of-freedom welding manipulator (Fig. 3) and so on.Considering the two-link manipulator with system parameters of link masses m1=15kg ,m2=12kg, lengths l1=0.8m, l2=0.75m.Initial conditions are given as θ1(0)=θ2(0)=0 rad, θ&1(0)=θ&2(0)=0 rad/s, and the desired trajectory is given by
) 4 sin( ) ( ) ( 2 1 t t t d d θ π
θ = = . The sampling period is set to be 0.0001s.The friction and disturbance terms are
assumed to beTd= ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ ) 5 cos( 5 ) 5 cos( 5 t
t N·m and F(q&)=0.5sign(q&).
The simulation results of simulations are shown in Fig.4 ~7. Fig.4 and Fig.5 show the tracking curve of two links, Fig.6 and Fig.7 give the tracking error of two links. Fig.8 and Fig.9 illustrate the torque on two links. From these results, we can conclude that the trajectory tracking control strategy based on fuzzy gauss function NN proposed in this paper can well counteract the effects due to uncertainties.The results show that the proposed method has good tracking performance.
0 0.5 1 1.5 2 2.5 3 3.5 4 -1.5 -1 -0.5 0 0.5 1 1.5 Po si ti on (ra d) Time (Sec) Desired actual 0 0.5 1 1.5 2 2.5 3 3.5 4 -1.5 -1 -0.5 0 0.5 1 1.5 Pos iti on ( ra d) Time (Sec) Desired actual 0 0.5 1 1.5 2 2.5 3 3.5 4 -0.5 -0.4 -0.3 -0.2 -0.1 0 0.1 0.2 E rror (r ad ) Time (Sec) Fig.4. The tracking curve of link 1 Fig.5. The tracking curve of link 2 Fig.6. The tracking error of link 1
0 0.5 1 1.5 2 2.5 3 3.5 4 -0.5 -0.4 -0.3 -0.2 -0.1 0 0.1 0.2 E rror (ra d) Time (Sec) 0 0.5 1 1.5 2 2.5 3 3.5 4 -500 0 500 1000 1500 2000 To rqu e (N · m) Time (Sec) 0 0.5 1 1.5 2 2.5 3 3.5 4 -200 0 200 400 600 800 1000 To rque ( N · m ) Time (Sec) Fig.7. The tracking error of link 2 Fig.8. The torque on link 1 Fig.9. The torque on link 2
5. Conclusions
A kind of fuzzy neural network controller based on gauss function as membership function is designed for a two degree-of-freedom welding manipulator trajectory tracking.The simulation results prove that the proposed strategy can effectively overcome the non-linear, coupling and other influence of factors exist in the robotic system ,thus illustrating the effectiveness of the proposed approach.
6. References
[1] GAO Yan-feng,ZHANG Hua,PENG Jun-pei,etc. Curved Seam Tracking Control of a Wheeled Welding Mobile Robot. ROBOT. 2007, 29(5):439-450.
[2] W.L.Tung and C.Quek. enSoFNN:A Generic Self-Organizing Fuzzy Neural Network. IEEE Trans. on Neural Networks . 2002,13(5):pp.1075-1085.
[3] Simon haykin.Neural Networks:A Comprehensive Foundation,2nd Edition [M].Beijing:China Machine Press;2004. [4] SUN Wei. The Researches of Intelligent Neural Network Theories And Their Applications on Robot Control[D]. Ph.D. Thesis.Changsha:Hunan University,2002.
[5] Lei Ma,Klaus Schilling and Christian Schmid. Adaptive Backstepping Sliding Mode Control with Gaussian Networks for a Class of Nonlinear Systems with Mismatched Uncertainties. IEEE Conference on Decision and Control and the European Control Conference; 2005,p.5504-5509.