International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459,ISO 9001:2008 Certified Journal, Volume 3, Issue 9, September 2013)
177
Target Tracking in Wireless Sensor Network
Prof. Sachin Deshpande
1, Prof. Umesh Kulkarni
2, Mritunjaykumar Ojha
31Associate Professor, 2Assistant Professor, Vidyalankar Institute of Technology, Wadala, Mumba, India 3Assistant Professor, Fr. C. Rodrigues Institute of Technology, Vashi, Navi Mumbai, India
Abstract—Wireless sensor networks have the potential to
become significant subsystems of engineering applications. Tracking mobile targets is an important wireless sensor network application in both military and civilian fields for applications like tracking objects or humans or guiding robots in hard to reach areas e.g. nuclear power plants etc. Often it may be necessary for sending additional resources to the vicinity of the mobile target. Tracking mobile targets involves detection and localization of the object of interest by processing the information provided by the sensing nodes along with their location.
The methodology presented here gives a solution to compute the state parameters of the adversary target and tracks it and associate the same with the location in the periphery of wireless sensor networks. This will be implemented using OMNeT++ using Castalia framework.
Keywords—Castalia, Centroid Method, Kalman Filter, OMNeT++, Target Tracking.
I. INTRODUCTION
One of the important applications of sensor networks is that of tracking mobile targets [1]–[2]. This could be used for tracking an enemy vehicle, intruders, own troops, animals in the wild, etc. Tracking mobile targets involves the detection and localization of the object of interest by processing the information provided by the sensing nodes along with the location. The tracking data may then be sent to the base station for further processing. The essential components that are required for target tracking applications are as follows:
Node Localization: It is used to enable the sensor nodes
to determine their location.
Target Localization: It determines the target‘s location at
regular intervals of times using techniques such as triangulation and tri-lateration [3].
Timing Synchronization: Synchronization in time
domain among node and target.
Often, it may be necessary to send a guided entity or an object to neutralize or intercept the moving target which would be the future scope of the system. This object can be a vehicle or a person. This paper gives a methodology for tracking the target and a brief introduction about the simulator using which the system will be implemented.
The computational complexity of the optimal tracking algorithm limits its practical realization using even the largest and fastest computers available [4]. Hence, there is a requirement for simple and possibly sub-optimal algorithms for wireless sensor network.
II. TARGET TRACKING ARCHITECTURE
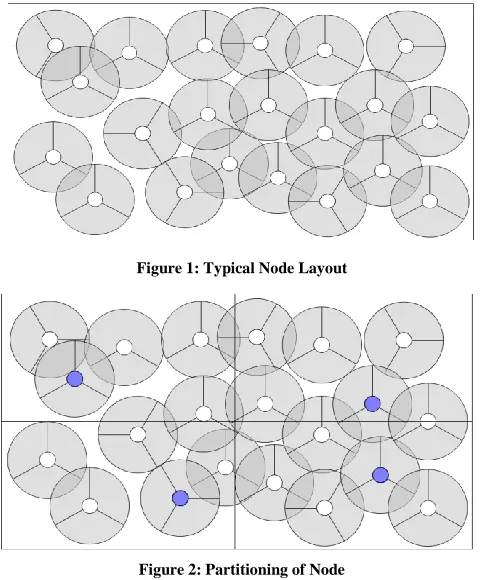
[image:1.612.323.563.358.648.2]A distributed hierarchical target tracking architecture is proposed. The area in which the target needs to be tracked is a 2-D sensor network deployment (R2) as shown in figure 1. The system focuses on the problem of finding the target state vector.
Figure 1: Typical Node Layout
Figure 2: Partitioning of Node
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459,ISO 9001:2008 Certified Journal, Volume 3, Issue 9, September 2013)
178
The entire region of interest is divided into a number of clusters. Each cluster has a Cluster Head (CH) and several normal nodes (NN) (in Figure 2). The cluster heads perform computationally intensive tasks in the cluster. The normal nodes are capable of sensing seismic, acoustic and magnetic activity. It is assumed that there is a high probability of targets originating outside the region of interest and entering through the periphery, therefore, nodes with higher capabilities are deployed at the periphery.
[image:2.612.332.561.250.560.2]
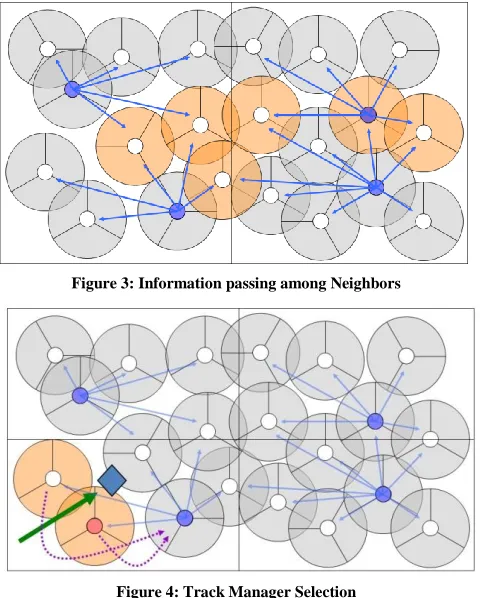
Figure 3: Information passing among Neighbors
Figure 4: Track Manager Selection
Cluster heads then find out the neighboring nodes by broadcasting information to all the nodes in the close proximity of the cluster heads (Figure 3). The target originates from outside the region of interest and enters the coverage area, through the periphery. It is assumed that there is a high probability of targets originating outside the region of interest and entering through the periphery, therefore, nodes with higher capabilities are deployed at the periphery as shown in Figure 4.
Sensors transmit the sensed information using a single- hop or a multi-hop path to the base station. The base station processes the sensed data to determine the targets path, once a target is detected in a particular cluster or, a track manager is assigned and follows the target in that cluster as shown in figure 5 and 6.
The selection of sensors is dependent on the target type and the signature emitted by the target. For this paper, we assume that the sensors have both the detection as well as ranging capacity and the same is available to sensor node.
Figure 5: Managing conflicting resources
Figure 6: Track generation
[image:2.612.50.290.258.557.2]International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459,ISO 9001:2008 Certified Journal, Volume 3, Issue 9, September 2013)
[image:3.612.49.288.132.256.2]179
Figure 7: Actual flow of information in target tracking
III. TARGET TRACKING METHODS
The target tracking problem is to determine the target state parameter X(t) , defined below, at different instances of time.
Y-Axis
X(t)=[Px,Py,Vx,Vy,θ]
θ
X-Axis
X(t)=[Px,Py,Vx,Vy,θ] (1)
Where [Px,Py] ―belongs to‖ R2 are the X and Y co-ordinates of the target, [Vx, Vy] are the velocity components along X and Y directions and θ is the direction of motion of the target.
Basic Centroid Method:
Let ‗n‘ be the number of sensors sensing the target‘s physical attribute above the set threshold and that all the ‗n‘ sensors report the sensed value to the cluster head within a time period T. (Time Period T between states t-1 and t
should be empirically chosen as per therequirement of the
application). In basic centroid method X co-ordinate and Y co-ordinate of the target is computed as follows:
Where and denotes the X Co-ordinate and Y
co-ordinate of the ith sensor.
Weighted Centroid Method:
Basic centroid method can be improved by assigning weights to the location value depending upon the sensed values. Assignment of weights depends upon the way to which a physical phenomenon diffuses over space. We set
Wi = Viα, where Wi is the weight assigned to ith node and
α is an empirically chosen constant.
In weighted centroid method the position of the moving target can now be computed as follows:
The velocity components and direction of motion of the target are calculated as follows:
IV. TARGET TRACKING FRAMEWORK
The network architecture used in a target tracking application is of critical importance for quality of tracking, timeliness communication of localized/predicted values and the total network energy consumed due to communication overheads.
Target tracking using filters:
It has assumed that in the network, the sensor nodes locations are known. The sensor nodes which have detected the presence of the target (if the sensed value is by the sensor node greater than pre-defined threshold) send their information to the base station using one of the three network architecture. Base station waits until the
pre-defined localization timer expires (t+Δt, where t is current
time and Δt is the localization interval) and then applies
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459,ISO 9001:2008 Certified Journal, Volume 3, Issue 9, September 2013)
180
A number of filtering techniques have been proposed, analysed and evaluated for enhancing Quality of Tracking (QoT), smoothening of target trajectory and prediction of future position of the target [7].
The majority of research literature in predictive target tracking favours hierarchical, decentralized, distributed cluster based approaches [7], [8], [9].
1) Single-Hop Centralized Architecture: In this architecture a centralized high capacity and powerful sink node is at the center of processing and logical network. All other nodes are assumed to be one-hop distance away from the sink and are always in active state for detection of the target.
Whenever the sensed value of physical attribute (acoustic, magnetic, heat signature etc.) exceeds a preset threshold in any node, the node transmits this value to the sink after waiting for a small random time. The small random delay is to avoid packet collision at the Sink node. The packets include the node identity along with its location in Cartesian co-ordinates and also the timestamps of detection of the target.
The sink node processes the information received from number of nodes detecting the target, at every localization instant separated by application time interval. The sink node sorts the received values and uses the highest three values from distinct nodes for target localization.
2) Data Collection Tree Architecture: A Data Collection Tree Routing protocol for data collection [18] or aggregation may be used to support target tracking communications. This architecture is also centralized and flat but it enables reception of sensed values from nodes at larger distances over multi-hop communication. In-network processing is also feasible through data fusion/aggregation at intermediate nodes while being relayed towards the sink. The data collection tree formation algorithm is explained in [12].
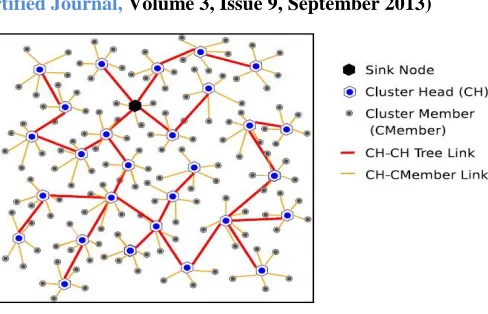
[image:4.612.332.576.123.280.2]3) Hierarchical Clustered Architecture: A clustered architecture has better scalability and is better suited for distributed processing [9]. Small groups of node within close vicinity of each other form clusters as shown in Figure 8.
Figure 8: Hierarchical clustered architecture
A higher capacity node may be deployed uniformly in the area to act as CH or the cluster nodes chose to elect their CH locally on rotational basis. Clustering enables majority of the nodes in the network to sleep/remain in inactive state, while keeping only a few nodes awake in those clusters which are in the vicinity of the target. The Hierarchical Clustered Architecture is formed during initial network setup and is carried out in two stages. In the first stage, the nodes in close vicinity form clusters, which are followed by second stage of tree formation over CHs alone with the Base station as the sink node.
V. TARGET TRACKING IMPLEMENTATION
Target tracking will be implemented using a popular discrete event simulator i.e. OMNeT++ [7]. It is not a WSN simulator, nor even a network simulator, but a rich simulation platform on which various independent groups can build their own simulators [13].
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459,ISO 9001:2008 Certified Journal, Volume 3, Issue 9, September 2013)
181
Scenarios and various simulation parameters are defined in INI files, and thus are separated from models and topology [13].
OMNeT++ includes an integrated development
environment (IDE) that enables C++ programming and debugging of simple modules, as well as graphical and textual editing of NED files. Tkenv is a GUI tool for monitoring simulation flow, featuring animation of message flow on network charts, visualizing node state changes, displaying debug output of modules or module groups, viewing and manually changing state of simulation objects etc. Tools for visualizing dynamic interactions among modules and for results analysis and visualization are also provided [13].
Example of a WSN simulator built on top of OMNeT++ is Castalia [14]. It is a generic simulator intended for the first order validation of high-level algorithms before moving to a specific sensor platform. In Castalia, sensor nodes are implemented as compound modules, consisting of sub-modules that represent, for instance, network stack layers, application, and sensor. Node modules are connected to wireless channel and physical process modules [12].
VI. CONCLUSION
In this paper, we considered the problem of tracking the target and the mechanism to determine the target‘s position. Target tracking framework was discussed in detail along with cluster tree generation. The paper also gives a brief insight about OMNeT++ and Castalia framework which will be used for implementation of target tracking in
wireless sensor network.
REFERENCES
[1] A. Gupta, C. Gui, and P. Mohapatra, ―Mobile target tracking using sensor networks,‖ in Mobile, Wireless, and Sensor Networks: Technology, Applications, and Future Direction, R. Shorey and A. Ananda, Eds. Wiley, 2006, pp. 173–196.
[2] R. R. Brooks, P. Ramanathan, and A. M. Sayeed, ―Distributed target classification and tracking in sensor networks,‖ Proceedings of the IEEE, vol. 91, pp. 1163–1171, 2003.
[3] A. Savvides, M. Srivastava, L. Girod, and D. Estrin, ―Localization in sensor networks,‖ in Wireless Sensor Networks, C. S. Raghavendra, K. M. Sivalingam, and T. Znati, Eds. Boston, MA: Kluwer Academic Publishers, 2004, ch. 15.
[4] E. Mazor, A. Averbauch, Y. Bar-Shalom, and J. Dayan, ―Interacting multiple model methods in target tracking: A survey,‖ IEEE Transactions on Aerospace and Electronic Systems, vol. 34, pp. 103–123, 1998.
[5] Goshorn, R., Goshorn, J., Goshorn, D., Aghajan, H.: Architecture for cluster-based automated surveillance network for detecting and tracking multiple persons. In: ACM/IEEE ICDSC, pp. 219–226 (September 2007).
[6] Zhang, W., Cao, G.: DCTC: Dynamic Convoy Tree-based Collaboration for Target Tracking in Sensor Networks. IEEE Transactions on Wireless Communications 3(5), 1689–1701 (2004). [7] R. Olfati-Saber, ―Distributed Kalman filtering for sensor networks,‖
in IEEE Conference on Decision and Control, Dec. 2007, pp. 5492 -5498.
[8] Xu, Y., Winter, J., Lee, W.C.: Prediction-based strategies for energy saving in object tracking sensor networks. In: IEEE International Conference on Mobile Data Management, pp. 346–357 (2004) [9] Wang, Z., Li, H., Shen, X., Sun, X., Wang, Z.: Tracking and
predicting moving targets in hierarchical sensor networks. In: IEEE ICNSC, pp. 1169–1173 (April 2008)
[10] Wensheng Zhang and Guohong Cao, ―DCTC: Dynamic Convoy Tree-Based Collaboration for Target Tracking in Sensor Networks‖ IEEE TRANSACTIONS ON WIRELESS COMMUNICATIONS, VOL. 3, NO. 5, SEPTEMBER 2004
[11] Wensheng Zhang and Guohong Cao, ―Optimizing Tree Reconfiguration for Mobile Target Tracking in Sensor Networks‖ INFOCOM 2004.
[12] S. Sharma, ―Alpha-Beta Filter Based Predictive Target Tracking and Guidance in Wireless Sensor Networks,‖ Master‘s thesis, Indian Institute Of Technology Madras, Chennai, April 2010.
[13] A. Varga and R. Hornig, ―An overview of the OMNeT++ simulation environment,‖ in Proceedings of the 1st international conference on Simulation tools and techniques for communications, networks and systems & workshops, 2008, pp. 1–10.