International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, ISO 9001:2008 Certified Journal, Volume 5, Issue 2, February 2015)
233
A Novel MATLAB GUI Comparative Technique to Evaluate
Generated Frequency and Saturated Magnetizing Reactance of
A 3-φ SEIG
Appurva Appan
1, S. N. Singh
2, Kavita Yadav
3 1M.Tech Student, 2Senior Scientific Officer, Alternate Hydro Energy Centre, Indian Institute of Technology Roorkee, Roorkee 247667, Uttarakhand, India
3M.Tech Student, Department of Electrical and Instrumentation Engineering, Thapar University, Patiala 147004, Punjab, India Abstract—Steady state analysis of a 3-φ SEIG is generally
done through mathematical modeling of its equivalent circuit. The impedance model can be reduced in terms of two nonlinear simultaneous equations consisting of unspecified variables as magnetizing reactance Xm and generated
frequency F. The steady state performance analysis of SEIG becomes uncomplicated once the values of Xm and F are
explicitly assessed. This paper presents a MATLAB Graphical User Interface (GUI) technique for determination of Xm and F
using the Newton Raphson and Fsolve optimization technique. The software package consisting of active windows deals with comprehensive assessment in terms of modeling of SEIG. The designed algorithm and MATLAB program for Newton Raphson and Fsolve optimization technique have also been integrated in the GUI for comparative and better understanding. The simulation results obtained using the presented methodology provides the optimum values of Xm
and F. The method evaluates the advantages of Fsolve optimization technique over the Newton Raphson technique. The GUI approach is found to be user friendly, application specific, facile and simpler.
Keywords—Fsolve Technique, Generated frequency, Graphical User Interface (GUI), Magnetizing reactance, Newton Raphson technique, Self Excited Induction Generator (SEIG).
NOMENCLATURE
C : capacitance F : frequency IL : load current Ir : rotor current IS : stator current RL : load resistance Rr : rotor resistance RS : stator resistance v : speed
XC : excitation capacitor reactance Xm : magnetizing reactance Xl : stator or rotor reactance Xlr : rotor reactance
Xls : stator reactance
ZS : stator impedance
All the parameters are defined on a per-unit basis.
I. INTRODUCTION
The extension of electrification and electricity amenities are crucial to the financial, social and balanced growth of a country and providing ―Electricity to everybody‖ has proven to be a substantial challenge for engineers in the present day scenario. After US and China, India ranks 3rd in the largest production of electricity [1] but still there is shortage in the electricity generation capacity. A little more than 30,000 villages in India do not have access to electricity as per the data in 2013 from where it has been deduced that electrified villages comprises of 94.6% of total villages in India [2]. As per the Ministry of Power Data on Village Electrification, the Indian states with more than 10% of un-electrified villages are given in Fig. 1 [3]. It is essential to ensure convenient access to electricity for progressive growth and for enhancement of standard of living in villages. However, village environments present different electrification needs compared with the urban industrial areas. It is uneconomical and technically difficult to extend large grids to such long distances as rural villages are being located at far flung areas. The challenges in the path of rural electrification are remote and disperse locations; small electric load demands and low income of the rural population. However, the rural areas are blessed with inexhaustible means of power such as wind, hydro, biomass and solar power.
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, ISO 9001:2008 Certified Journal, Volume 5, Issue 2, February 2015)
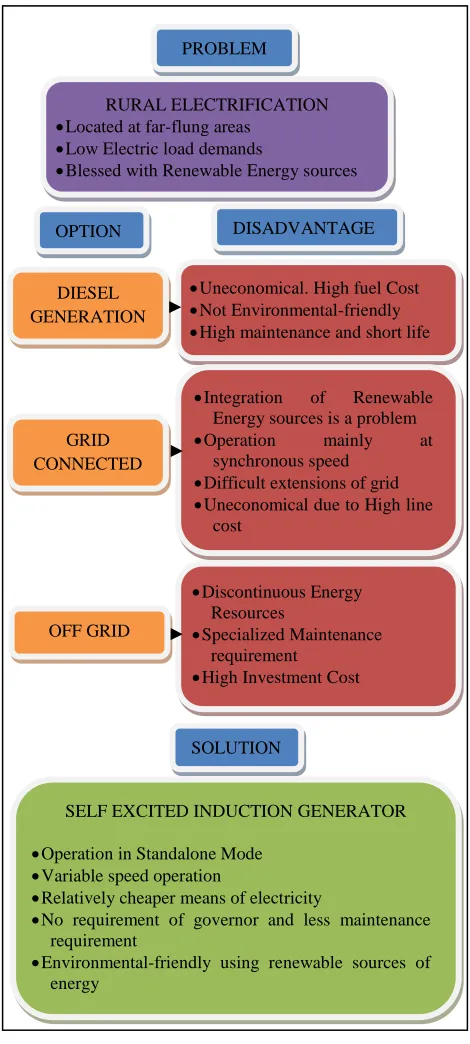
[image:2.612.329.564.135.657.2]234 The existing alternatives of Grid and Diesel generation have proved to be inappropriate to solve the problem of rural electrification completely mainly due to high cost and operation of the generator at synchronous speed. Thus, the problem solution needs to be Off-grid. The suitability of SEIG as a solution for the problem of rural electrification is shown in Fig. 2.
Fig. 1: Indian States with more than 10% of un-electrified villages
Considering the design and operating aspect, steady state analysis of SEIG is essential. It should be made viable that if the SEIG parameters are known, the performance of the machine can be predicted for a specified capacitance, speed and load. However, the investigation is difficult because it requires solution of higher order non-linear equations. The investigation is complex due to magnetic saturation and requirement of choosing apt parameters to this corresponding saturated condition. The evaluation of equivalent circuit results in nonlinear equations the solution of which are magnetizing reactance Xm and frequency F for the specified capacitance, speed and load. Many iterative techniques have been used in the literature to analyze the performance of the machine [4-6]. One of the major analytical but rigorous and tedious techniques was Newton Raphson technique to evaluate the unknown parameters [7-8]. This paper covers the MATLAB inbuilt Fsolve optimization technique for solving the nonlinear equations. A little attempt has been made in the literature in this concern [9].
Fig. 2: Self Excited Induction Generator (SEIG) as a solution of Rural Electrification
PROBLEM
OPTION S
DIESEL GENERATION
Uneconomical. High fuel Cost Not Environmental-friendly High maintenance and short life RURAL ELECTRIFICATION
Located at far-flung areas Low Electric load demands
Blessed with Renewable Energy sources
DISADVANTAGE S
SOLUTION
SELF EXCITED INDUCTION GENERATOR
Operation in Standalone Mode Variable speed operation
Relatively cheaper means of electricity
No requirement of governor and less maintenance requirement
Environmental-friendly using renewable sources of energy
GRID CONNECTED
Integration of Renewable Energy sources is a problem Operation mainly at
synchronous speed Difficult extensions of grid Uneconomical due to High line
cost
OFF GRID
Discontinuous Energy Resources
Specialized Maintenance requirement
[image:2.612.55.280.225.362.2]International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, ISO 9001:2008 Certified Journal, Volume 5, Issue 2, February 2015)
235 However, SEIG has not made been able to make its mark in the customer market substantially. One of the major reasons in this regard has been the complicated design and complex operational analysis of SEIG. There is necessity for efforts to be made to reduce the shortcomings and successful implementation of SEIG in the field. Investigation and design of the machine demands a user friendly application in order to assess the performance under distinct varying working states. A Graphical User Interface (GUI) has been developed that allows users to perform any action through visual manipulations. This paper deals with a novel approach of integrating both the Newton Raphson and Fsolve technique in developed GUI along with the designed algorithms and MATLAB coding of respective techniques which results in comparative analysis of both the techniques. Active windows have been created to design a complete package for the interested users that includes equivalent circuit of SEIG and related nonlinear equations. Fsolve method has been found to be elegant and simple in solution of the nonlinear equations and GUI is shown to be a productive asset for designing and visualize the outcomes.
II. SEIGMODELING AND ANALYSIS
[image:3.612.333.563.125.437.2]The induction generator has the capability to engender energy at variable speeds and this feature is used for its application in an assortment of means such as Self-excited mode and the Grid-connected mode. Among the two, SEIG has more importance in terms of its application in isolated mode. The block diagram of SEIG can be represented as in Fig. 3 [10].
Fig. 3: Schematic block diagram of SEIG
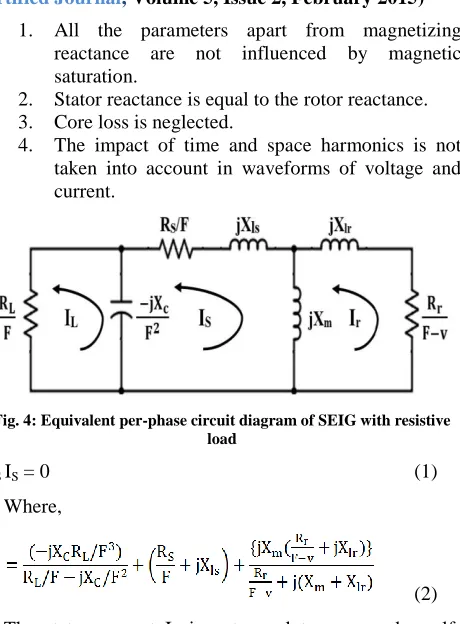
The steady state investigation of SEIG is carried out using its per-unit equivalent circuit diagram with a resistive load as shown in Fig. 4. The assumptions for the equivalent circuit and the loop equation for the middle loop is presented in equations (1) and (2) [7].
1. All the parameters apart from magnetizing reactance are not influenced by magnetic saturation.
2. Stator reactance is equal to the rotor reactance. 3. Core loss is neglected.
4. The impact of time and space harmonics is not taken into account in waveforms of voltage and current.
Fig. 4: Equivalent per-phase circuit diagram of SEIG with resistive load
ZS IS = 0 (1)
Where,
(2)
The stator current IS is not equal to zero under self-excitation and thus, from (1), it can be deduced that the real and imaginary parts of (2) which is the per-unit stator impedance can be equated to zero. The derived nonlinear simultaneous equations in terms of magnetizing reactance Xm and frequency F can be represented as in (3) and (4).
f1 (Xm , F) = (A1 Xm + A2) F3 + (A3 Xm +A4) F2 +
(A5 Xm +A6) F + (A7 Xm + A8) = 0 (3)
f2 (Xm , F) = (B1 Xm + B2) F2 + (B3 Xm +B4) F +
B5 = 0 (4)
Here A1-A8 and B1-B5 are constant values and defined in (5).
A1 = -2 RL Xl A2 = -RL Xl
2
A3 = 2 RL Xl A4 = RL Xl 2
A5 = (Rr + Rs + RL) Xc
A6 = (Rr + Rs + RL) Xl Xc + Rr Rs RL A7 = -(RL + Rs) Xc
[image:3.612.59.278.512.620.2]International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, ISO 9001:2008 Certified Journal, Volume 5, Issue 2, February 2015)
236 B1 = (Rs + Rr) RL + 2 Xc Xl
B2 = (Rr + Rs) Xl RL + Xc Xl2 B3 = 2 Xc Xl + RL Rs
B4 = -(Xc Xl + RL Rs) Xl
B5 = -(RL + Rs) Rr Xc (5)
The solution of simultaneous nonlinear equations of (3) and (4) is a complicated and rigorous process. The analytical iterative technique of Newton Raphson method involves partial derivatives of the equations for building up Jacobian matrix. A new elegant and simpler technique would be MATLAB Fsolve optimization tool. The Fsolve technique reduces the length of algorithm and also provides the accurate result without inputting the degree of error. The determination of Xm and F for different values of speed, load and frequency is important to choose the machine parameters under magnetic saturation for design consideration.
III. NONLINEAR EQUATION SOLUTION TECHNIQUES
A. Newton Raphson Technique
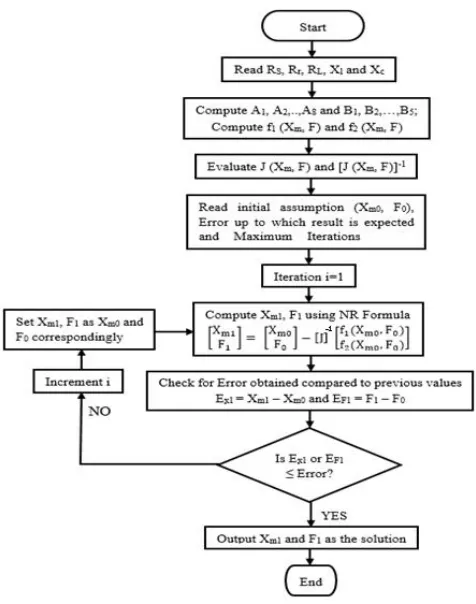
[image:4.612.387.497.389.485.2]The designed NR algorithm for determination of Xm and F in a flowchart is shown in Fig. 5.
Fig. 5: NR Flowchart for determination of Xm and F
The Newton-Raphson iterative technique has been found to be appropriate in order to solve simultaneous nonlinear equations as in (3) and (4). The NR formula is stated as in (6) where Xm0 and F0 are the initial guess of the unknown values of Xm and F. The Jacobian matrix denoted by [J] is defined in (7).
(6)
where,
(7)
B. Fsolve Technique
[image:4.612.49.287.404.706.2]The Fsolve technique is an inbuilt MATLAB optimization tool which gives the solution of multiple simultaneous nonlinear equations with accuracy without any need to input the desired rate of error. The designed algorithm for determination of Xm and F in a flowchart is shown in Fig. 6.
Fig. 6: Fsolve Flowchart for determination of Xm and F
IV. EXHIBITION OF DEVELOPED TOOL
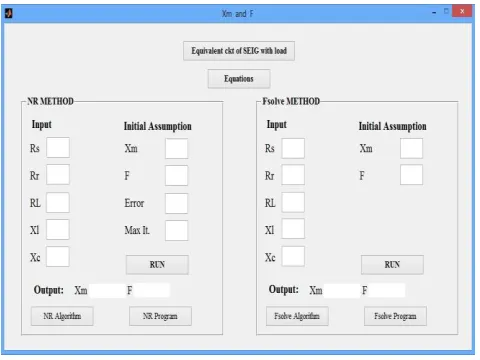
This section presents the integration of both Newton Raphson and Fsolve technique in the MATLAB GUI for user friendly calculation of simultaneous nonlinear equations in (3) and (4). Rapid efforts have been made lately in the literature in GUI analysis [11-13].The principal window consists of:
1. Equivalent circuit diagram of SEIG. 2. Equations
3. NR Algorithm 4. NR Program 5. Fsolve Algorithm 6. Fsolve Program
7. Interactive window for NR and Fsolve with editable parameters
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, ISO 9001:2008 Certified Journal, Volume 5, Issue 2, February 2015)
237 Equivalent circuit diagram of SEIG will open Fig. 4, Equations will open (3)-(5), NR Algorithm will open Fig. 5, NR Program will open Appendix B, Fsolve Algorithm will open Fig. 6, Fsolve Program will open Appendix C and the Interactive window can be used for operation. The principal window of the application is presented in Fig. 7.
Fig. 7: Principal window of the application
The machine opted for validation of GUI is 3-phase, 50Hz, 4-pole, 415/240V, 13.2/22.9A, 6.8 kW star/delta connected SCIM where the per-unit equivalent parameters are:
RS = 0.0602, Rr = 0.0453, Xls = Xlr = Xl = 0.0961
The window of evaluated result for a particular value of load, speed and capacitance is given in Fig. 8.
Fig. 8: The window of evaluated output for a specific value of load, speed and capacitance
In case of NR method, in addition of defining the initial assumption of Xm and F, the degree of error up to which the result is desired also needs to be mentioned. An additional block of Max. It. has been included to define the Maximum Iterations beforehand in case the program gets into an indefinite loop.
V. RESULTS AND DISCUSSION
The outcomes obtained from the Fsolve method is found to be 17 times faster than the outcomes obtained from the NR method in the designed GUI application. The worthiness of suggested method is revealed with the calculated values of Xm and F under distinct working speed, capacitance and load as shown in Table I to Table V. The calculation of base values for machine parameters are given in Appendix A. Table I shows the value of Xm and F at no load with excitation capacitance C=25µF. The Xm and F values under no load are comparatively smaller. The values are calculated under loads of 100, 200, 400, 800Ω and capacitances of 25, 50, 75 and 100µF in Table II to Table V. It is seen that the values of Xm and F increases with increase in load and decrease in excitation capacitance values.
Table I
Values Of Magnetzing Reactance And Frequency At No Load With C=25 µF
Xm(p.u.) Xm(Ω) F(p.u.)
0.0290 0.527 0.5706
TableII
Values Of Magnetzing Reactance And Frequency With C=25 µF
RL (Ω) RL(p.u.) Xm(p.u.) Xm(Ω) F(p.u.)
100 5.5 0.4899 8.907 0.9911 200 11 0.7723 14.042 0.9954 400 22 1.0934 19.880 0.9976 800 44 1.3839 25.162 0.9987
TableIII
Values Of Magnetzing Reactance And Frequency With C=50 µF
RL (Ω) RL(p.u.) Xm(p.u.) Xm(Ω) F(p.u.)
[image:5.612.49.289.207.387.2]International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, ISO 9001:2008 Certified Journal, Volume 5, Issue 2, February 2015)
238 Table IV
Values Of Magnetzing Reactance And Frequency With C = 75 µf
RL (Ω) RL(p.u.) Xm(p.u.) Xm(Ω) F(p.u.)
100 5.5 0.3182 5.786 0.9883 200 11 0.4173 7.587 0.9932
[image:6.612.66.273.254.335.2]400 22 0.4961 9.020 0.9957 800 44 0.5485 9.973 0.9969
Table V
Values Of Magnetzing Reactance And Frequency With C = 100 µf
RL (Ω) RL(p.u.) Xm(p.u.) Xm(Ω) F(p.u.)
100 5.5 0.2697 4.904 0.9866 200 11 0.3374 6.135 0.9916
400 22 0.3871 7.038 0.9942 800 44 0.4182 7.604 0.9955
VI. CONCLUSION
An effort is made in this paper to solve the SEIG problem of not penetrating the consumer market by development of an easy to use application of MATLAB GUI. GUI has proven to be a very productive asset for designing and visualizing the outcomes. Several windows have been created in order to include complete analysis of SEIG for better understanding. The feature of Newton Raphson and Fsolve technique has been integrated in the GUI where the Fsolve method has been found to be comparatively suitable for evaluation of Xm and F. Fsolve promises substantially simpler algorithm, faster response and comparatively accurate result since degree of error need not be defined in its case. This approach can be considered for evaluating comprehensive performance evaluation of 3-phase SEIG and its voltage and frequency regulation problems.
VII. APPENDIX
A. Machine Parameters
Vbase = Phase voltage (rated) = 240 V Ibase = Phase current (rated) = 13.2 A Zbase = Base impedance = 18.182 Ω Pbase = Base power = 3.17 kW Fbase = Base frequency = 50 Hz
The machine parameters in per-unit are: Rs = 0.602, Rr = 0.0453, Xls = Xlr =Xl = 0.0961
B. Small section of MATLAB GUI program for NR
if nargin && ischar(varargin{1})
gui_State.gui_Callback = str2func(varargin{1});
end
if nargout
[varargout{1:nargout}] =
gui_mainfcn(gui_State, varargin{:});
else
gui_mainfcn(gui_State, varargin{:});
end
function p = f1f2(a,b)
global a1 a2 a3 a4 a5 a6 a7 a8 b1 b2 b3 b4 b5
syms x y % x = xm and y = f
f1 = (a1*x+a2)*y^3 + (a3*x + a4)*y^2 + (a5*x+ a6)*y + (a7*x+ a8);
f2 = (b1*x + b2)*y^2 + (b3*x+ b4)*y + b5;
z = subs(f1,a);
f1v = cast(subs(z,b),'double'); z = subs(f2,a);
f2v = cast(subs(z,b),'double'); p = [f1v; f2v];
end
function z = jac(a,b)
global a1 a2 a3 a4 a5 a6 a7 a8 b1 b2 b3 b4 b5
syms x y % x = xm and y = f
f1 = (a1*x+a2)*y^3 + (a3*x + a4)*y^2 + (a5*x+ a6)*y + (a7*x+ a8);
f2 = (b1*x + b2)*y^2 + (b3*x+ b4)*y + b5;
df1x = diff(f1,x); df1y = diff(f1,y); df2x = diff(f2,x); df2y = diff(f2,y); q = subs(df1x, b); q1 = subs(df1y,a); q1 = subs(q1,b); q2 = subs(df2x,b); q3 = subs(df2y,a); q3 = subs(q3,b);
z = [cast(q,'double') cast(q1,'double') ; cast(q2,'double')
cast(q3,'double')]; z = inv(z);
end
function s = calc(a,b) s = jac(a,b)*f1f2(a,b);
end
err =
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, ISO 9001:2008 Certified Journal, Volume 5, Issue 2, February 2015)
239
mit =
str2double(get(handles.edit9,'string')) ;
xma = xm; fa = f;
for k = 1:mit
p = [xma(k) ; fa(k)] - calc(xma(k),fa(k));
xma = [xma p(1)]; fa = [fa p(2)];
if p(1) < err && p(2) < err
set(handles.text11,'string',p(1)) set(handles.text12,'string',p(2))
break
end
end
set(handles.text11,'string',p(1)) set(handles.text12,'string',p(2))
C. Small section of MATLAB GUI program for Fsolve function z = eqns(x)
global a1 a2 a3 a4 a5 a6 a7 a8 b1 b2 b3 b4 b5
z(1) = (a1*x(1)+a2)*x(2)^3 + (a3*x(1) + a4)*x(2)^2 + (a5*x(1)+ a6)*x(2) +
(a7*x(1)+ a8);
z(2) = (b1*x(1) + b2)*x(2)^2 + (b3*x(1)+ b4)*x(2) + b5;
end
global a1 a2 a3 a4 a5 a6 a7 a8 b1 b2 b3 b4 b5
set([handles.edit11 handles.edit12 handles.edit13 handles.edit14 handles.edit15 handles.edit16 handles.edit17 ],'string','') msgbox('INVALID INPUT','TRY AGAIN','warn','modal')
return end
a1 = -2*xl*rl; a2 = -xl^2 * rl; a3 = 2*xl*rl; a4 = xl^2*rl;
a5 = xc*(rs+rl+rr);
a6 = xc*xl*(rl + rs + rr)+ rl*rs*rr; a7 = -xc*(rs+rl);
a8 = -xc*xl*(rs+rl); b1 = 2*xl*xc+rl*(rs+rr); b2 = rl*xl*(rs+rr)+xl^2*xc;
b3 = rs*rl+2*xl*xc; b4 = -xl*(rs*rl+xl*xc); b5 = -xc*rr*(rl+rs);
s = fsolve(@eqns , [xm f]); set(handles.text19,'string',s(1)) set(handles.text20,'string',s(2))
REFERENCES
[1] ―Electricity Sector in India‖, http://en.wikipedia.org/wiki/Electricity _sector_in_India, Retrieved 20th January, 2015.
[2] ―Rural Electrification: India‖, http://effut.com/knowledgebase/2014/ 06/30/rural-electrification, Retrieved 25th January, 2015.
[3] ―Models of Rural Electrification Report to Forum of Indian Regulators‖, http://www.forumofregulators.gov.in/Data/Reports/Fin al_Foir_Report_5th_March07_Models_of_RE_E&Y%5B1%5D, Retrieved 25th January, 2015.
[4] K. S. Sandhu, ―Iterative model for the analysis of self-excited induction generators,‖ Elec. Power Comp. Syst., vol. 31, no. 10, pp. 925-939, Oct. 2003.
[5] T. F. Chan, ―Analysis of self-excited induction generators using an iterative method,‖ IEEE Trans. Energy Convers., vol. 10, no. 3, pp. 502-507, Sep. 1995.
[6] K. A. Nigim, M. M. A. Salama and M. Kazerani, ―Solving polynomial algebraic equations of the stand alone induction generator,‖ International Journal of Electrical Engineering Education, vol. 40, no. 1, pp. 45-54, Jan. 2003.
[7] S. S. Murthy, O. P. Malik and A. K. Tandon, ―Analysis of Self-excited Induction Generators,‖ Proc. Inst. Elect. Eng. C, vol. 129, no. 6, pp. 260-265, Nov. 1982.
[8] A. K. Tandon, S. S. Murthy and G. J. Berg, ―Steady state analysis of capacitor self-excited induction generators,‖ IEEE Trans. Power Apparatus and Systems, vol. 103, no. 3, pp. 612-617, Mar. 1984. [9] S. S. Murthy and R. K. Ahuja, ―Design and Analysis of Three Phase
Self Excited Induction Generators using MATLAB Graphical User Interface Based Methodology,‖ IEEE International Conference on Power, Control and Embedded Systems (ICPCES-2010), vol., no., pp. 1-5, Nov. 28-Dec. 1, 2010.
[10] S. R. Kumar, P. Raja and M. P. Selvan, ―Virtual laboratory environment using MATLAB-GUI for teaching of induction generators,‖ Annual IEEE India Conference (INDICON), vol., no., pp. 676-681, 7-9 Dec. 2012.
[11] A. Pradana, V. Sandeep, S. S. Murthy and B. Singh, ―A comprehensive MATLAB – GUI based performance evaluation of three winding single phase SEIG,‖ Proc. Drives and Energy Systems (PEDES), vol., no., pp. 16-19, Dec. 2012.
[12] S. S. Murthy, G. Bhuvaneswari, R. K. Ahuja and S. Gao, ―A Novel MATLAB Graphical User Interface Based Methodology for Analysis, Design and Capacitor Estimation of Self Excited Induction Generators,‖ IEEE Industry Applications Society Annual Meeting (IAS), vol., no., pp. 1-6, 3-7 Oct. 2010.