A report submitted in partial fulfilment of the
requirements for the degree of Master of Engineering,
at the Un.iversity of Canterbury, Christchurch,
Nm'l Zealand.
by
Bernard H··M. gBe,
:1.
ABSTRACT
This report describes the computer program "WASP" written
to test the feasibility of simulating a river
channel/lake/hydro-electric power-station system on a digital computer.
WASP is a progrruu package consisting of a main program
called CONTROL, and three principal subroutines: RIVER3 {models
open channels), JUNCTN {models channel bifurcations) and POND
(models flovlS through lakes and power-stations). To simulate
a river system using WASP, a user is required to write a new
sub-routine called SYSTEM, the statements of which consist of CALL
statements. Each of these CALL statements calls one or another
of RIVER3, JUNCTN or POND (the argument list referring to a·
particular part of the river system).
The CALL statements of subroutine SYSTEM describe the
architecture of the system.
At its present stage of development, WASP is capable of fast
and accurate simulat:.ion of open channels carrying stea.dy or slowly
fluctuating unsteady flows. Further vlork is required before :i.t
is able to satisfactorily simulate the wa·ter flow through a
ACKNOWLEDGEMENTS
I \'lish to express my appreciation of the assistance given
during 1::his study. In part:i.cular, I thank my supervisors Dr.
D.G. Elms, Dr. P.J. Moss and Professor I.R. Wood for their
guidance and assistance during the work. Also I thank Messrs
W. Fookes, J. Black, D. Goring,
s.
Thompson and K. Douglas ofthe Ministry of Works a.nd Messrs S. Astwood and D. Gorman of ·
the New Zealand Electricity Department for their time and effort
in providing essential information for the study,
For the production of this report I thank Drs D.G. Elms,
P.J. Moss and A.J. Sutherland for their comments on the drafts,
and Mrs. B. Stout for her patience \'lith the typing.
Bernard H-M. Gee,
iii
CONTENTS
PAGE
Abstract i
Acknowledgements ii
Contents iii
List of Figures and Tables v
Nomenclature vii
List of Symbols used in WASP diagram viii
1. HYDRODYNAMIC SIMULA'l'ION
1.1 Introduction 1
1.2 Formulation of the river system model 2
1.2.1 The Variables in a Model 4
1.2.2 Model Complexity 6
1.2.3 Program Efficiency 7
1.2.4 Experimental Design Features 7
1.2.5 Model Realism 8
2. A REVIEW O.E' SOME EXISTING OPEN CHANl\IEL FLOW PROGRAMS
2.1 Introduction 10
2.2 The Choice of a Language 12
2. 3 Existing Open Channel Flm'l Programs 13
2.3.1 The N.I.T. Unsteady Flow Computer Program 14
2.3.2 Program HYDRAC 15
2.3.3 Program ChNAL 16
3. DESCRIPTION OF THE CONFUTER PROGRAMS
3.1 Introduction 18
3.2 Choice of Algorithm 19
3. 3 Outline of the Ne·thod of Characteristics 21
3~4 RIVER2 22
3.5 RIVER4 25
3.6.1 Subroutine RIVER3
3.6.2 Subroutine JUNCTN
3.6.3 Subroutine POND
3.7 Simulating with WASP
3.8 The Problem with Meanders
3.8.1 Geometry and Flow Characteristics
3,8.2 Energy Losses
3.8.3 Numerical Considerations
3. 9 ·waterfalls, Rapids, Lateral Inflmv and Outflow
4. TEST CASES AND RESULTS
4.1 Introduction
4.2 Test Case for RIVER2 and RIVER4
4.3 Tes·t Cases for WASP
4.3.1 Test Case No. 1 for Subroutine
4.3.2 Test Case No. 2 for Subroutine
4.3.3 Test Case No. 3 for Subroutine
5. CONCLUSIONS AND RECOMMENDATIONS
5.1 Conclusions
5.1.1 General Conclusions for WASP
5.1.2 Limitations of WASP
JUNCTN and RIVER3
RIVER3
POND
5.2 Recommendations for further work on WASP
REFERENCES
BIBLIOGRAPHY
APPENDICES:
PAGE
29
29
32
34
36
36
38
39
41
42
43
46
46
50
52
56
56
57
59
61
64
A. Derivation of Ordinary Differential Equations for Unsteady Flow 67
B. Solution of Unsteady Flow Equation by the Method of Characteristics 70
c.
User's Manual for WASP (inc. Listing)D. User's Manual for RIVER4 (inc. Listing)
76
Figure '1 2 3 4 5 6 7 8 9
10
11 12 13 14 15 16 17 18 19 20 21 A.l B.l B.2 B.3 c.l C.2c.
3LIST OF FIGURES AND TABLES
Development Steps for a Simulation Model
Classification of Some Simulation Languages
Simplified Program Structure of CANAL
Decision Tree for Metl1ods of Solution
Macro Flow Chart for RIVER4
Rectangular Grid for Method of cr:_aracteristics
RIVER4 Hierarchy
The Concept of WASP
WASP Hierarchy
Rectangular Grid for Bifurcations
,JUNCTI.ON Macro !<'low Chart
POND Macro Flow Chart
Example of a Water Resource System
Meanders
Depth-:-Velocity Profiles
Ohio-Mississippi Junction
Water Surface Profiles for Test Case No. 1
Curve for Upstream Discharge
The Artificial River System
Cross Section through a Typical Hydry-Electric Power
Station
Water Level Curves
Control Volume for Unsteady Flow
c1 and c2 Characteristics
Rectangular Grid
+
-C and -C -Characteristics
WASP Hierarchy
An Allowable River System
Section Representation
v PAGE 3 12 16 20 23 24 25 26 27 29 31 33 34 37 45 48 49 51 52 53 54 67
70
.
7073
78
79
Table
.c.4 Form of Input Data
c.S Definition of a Power-Station and Lake Variables
C.6 The System to be Simulated
C.7 Input Curves for Upstream Boundaries
C.S The Artificial River System
C.4.1 WASP-CONTROL Macro Flow Chart
D.l Section Representation
D.2 Form of Input Data
D.3 Channel Properties
1 Input and Output requirements for River System Models
2 Computer Times for Program Runs
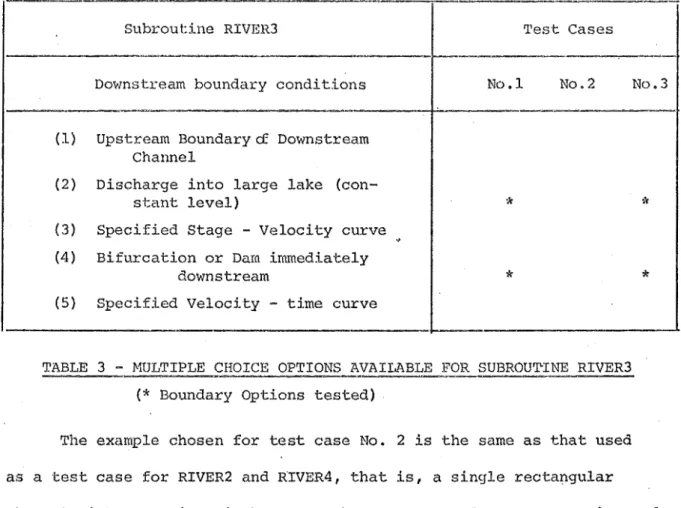
3 Multiple Choice Options Available for Subroutine RIVER3
c.l River Properties
C.2 River Properties
PAGE
82
92
96
97
98
104
115
116
120
5
44
51
97
NOMENCIJ\ 't'URE
CHANNEl~ SFTC/IONS (ARTIF/C::Irl/..1-Y .D/V/J;>f;i" THE CflAN/:1/.:::L INTO
R t-==A C II ES
J
Fig. {i) Elevation of Typical Channel
7 bed shear stress
0
S channel bed slope (angle a very small, i.e. cosd l)
0
SA'l:;:
t'SE'C:T/ON
A'RIEA.)
Fig. (ii) Typical Channel~
SHYR (section hydraulic radius) =
fix) Dx)
fit) DT)
reach length
simulation time increment SAR
p
values of depth and velocity at section P at time
=
T.YEP,VEP values of d~pth and velocity at section P at time
=
T + fit.c+ positive characteristic
C negative characteristic
AI area at (same as SAR) section I.
NSC : number of channel section (usually t11e last downstream one).
g acceleration due to gravity
p liquid density
DEFINITION OF SYMBOLS USED IN WASP DIAGRAr--18
SYMBOJ_,
10 37
1 - - - - 1
1 >
-4'1
~8
IV-+'
DEFINITION
Represents a natural or artificial channel of a river system. This is modelled by subroutine RIVER3. The lower of the two numbers is the number of the upstream bound-ary section, whilst the other is the number of the dmvnstream boundary section.
Represents a channel bifurcation, and is
modelled by subroutine JUNCTN. Numbers are
boundary section numbers of channels forming
the bifurcation. The branches of the
bifurcation are in fact of negligible length, but have been drawn as such for clarity.
Represents an upstream boundary at \vhich the flow relationship is known and is available in RIVER3.
A downstream boundary at which the flow relationship is known and is available in RIVER3.
The open sea, in·to which the river empties. Water depth at section 96 is assumed to be constant throughout the simulation run.
Reservoir or lake with a single controlled ·
outlet. At least one inflow.
Hydro-electric power-station and reservoir with at least one inflow.
CHAPTER.I
HYDRODYNAHIC SIMUI,ATION
1.1 INTRODUCTION
Simulation is essentially a technique that involves setting
up a model of a real situation and then performing experiments on the
model, which is itself amenable to manipul~tions which would be
impossible, too expensive or impractical to perform on the entity it
portrays · (1) • This definition of simulation is extremely broad,
however, and may include seemingly unrelated things such as business
management games, physical models of major river basis,
econo-metric models and various electrical analog devices. Within the
context of this thesis, simulation will be treated as a numerical
technique for conducting experiments on a digital computer, which
involves certain types of mathematical and logical models that
describe the behaviour of a river system, over extended periods of
real time (1) •
Before any experiments can be conducted, a model of the x·iver
system must be constructed. In the past, many computer programs
which model unsteady flows in open channels have been v~itten.
Fewer have been written which model the water flow through the
pen-stocks, turbines and draft tubes of a hydro-electric power station,
but there appear to be none written which model the water flows through
a combination of both. As most systems with sizeable rivers in New
Zealand have at least one hydro-electric power station and consist of•
at least two or more reasonably large rivers (e.g. the Clutha, the
Waikato), there is a need for a computer simulation program which
is able to cater for a combination of rivers and powcr'stations.
In response to this need, three computer programs, RIVER2, RIVER4
and WASP, have been developed by the author. RIVER2, 'Jlhich models
unsteady flow in a single channel only, was written first·and was
used to test various mathematical procedures. RIVER4 is basically
a faster and more efficient version of RIVER2, and has in one case
reduced the computation time for a problem by eighty per cent of
that normally taken by RIVER2 for the sameprdblem. NASP is a
flex-ible simulation program which has been designed to model the water
flow through a river system composed of river channels1 lakes,
reservoirs. and hydro-electric power stations.
A more detailed description of >chese computer programs may
be found in Chapter III, whilst a user's manual and listings·may
be found in Appendices C and D respectively. Chapter IV discusses
the results obtained from running test case data on these programs,
and Chapter II reviews some of the computer programs written by
others to model parts of a river system, showing the limitations of
their prog:r:ams and how they have treated the difficulties inherent
in modelling a river system. The rest of this chapter is devoted
to a discussion of the formulation of the river system model,
esp-ecially the hydraulic principles involved, the mathematical techniques
used, the computer program layout and in general, the problems
involved \<Jhen modelling a river/lake/reservoir/power-station system.
1. 2 Formulation of the River System Model
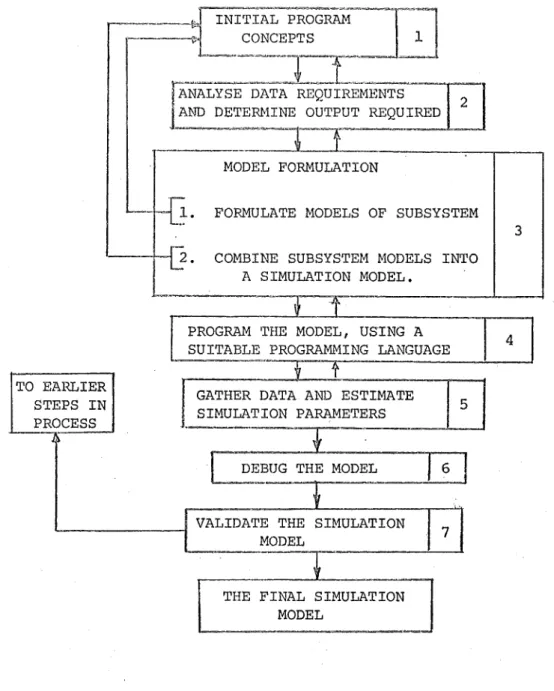
The development from initial concepts to the final computer
program model of a river system can often be traced through a series
of development steps, the number of identifiable steps and the
order in which they are carried out being highly dependent upon the
particular situation.
is shown in Figure 1.
points, the process
A flow chart of one such series of steps
Note that in this chart, at a number of given
returns to a previous step. That is, the
MODEL FORMULATION
FORMULATE HODELS OF SUBSYSTEM
~---r~ 2. COMBINE SUBSYSTEM MODELS INTO A SIMULATION MODEL.
PROGRAH 'rfiE MODEL, USING A SUITABLE PROGRAMMING LANGUAGE
TO EARLIER STEPS IN PROCESS
GATHER DATA AND ESTIMATE SIMULATION PARAMETERS
'---lrVALIDATE THE SIMULATION
L
MODELTHE FINAL
SIMULATI~N ~
MODEL
7
5
3
4
FIGURE 1 - DEVELOPMENT STEPS FOR A SIMULATION MODEL
five sections, the number of variables to be included in the model,
the complexity of the model, the computational efficiency of the
program, the amount of "realism" to be built into ·the model and the
compatibility of the models \'lith the type of experiments that are
going to be carried out with them; that is, ·the consideration of
the experimental design features that will be built into the models.
1.2.1 The Variables in a Model
One of the first considerations that enters in·to the .
formulation of a river system ~odel is the question of how many
variables are to be included in the model. Before this can be
done, the input and output requirements for the model.should be
determined. For a river system comprising river channels, river
bifurcations, lakes, reservoirs and power-stations, these are
different sets of requirements for each component of the system. For
example, a model which simulates a river will require as input data,
physical properties of the channel, initial flow conditions and water
behaviour over a selec·ted time period. On the other hand, a model
which simulates the \vater flow through a hydro-electric pov;er station
would require rating curves for penstocks, turbines, spillway sluice
gates and the like. (A complete summary of input and output
require-ments for a river system may be found in Table 1). Once these
requirements have been 'determined, then the nurnber of exogenous (or
independent or input) and the number of endogenous (or dependent or
output) variables can be finalised. For example, in a model of an
open channel, three necessary endogenous variables are the water
depth and velocity at points located along the line of the river, an
TABLE 1
INPUT AND OUTPUT ¥EQUI~MENTS FOR RIVER SYSTEM"MODELS
r---~r---·---.---·---~ Model
Components
River, canal or any other open flow channel.
Channel Junction
Lake or Reservoir
"Through-flow11
Power station with reservoir.
Input Requirements
1. Physical properties, in-cluding channel geometry.
2, Initial flow conditions.
3, Water flow behaviour over
a
selected time period{for channel boundaries).
1. Physical properties in-cluding channel geometry. 2. Initial flow conditions.
1. Physical properties in terms of volume-level curves.
2. The ratings of any inflow or outflow control struct-ures such as sluice gates, but excluding power
stations.
1. Physical properties in rel-ation to water flow
through the structure. Will be in the form of head loss-flow rate curves for penstocks, scroll ·tubes and rotating curves for spillway sluice gates and the like •
2. Initial flow conditions. 3. The behaviour of flow
through the station over a selected time period.
As for Lake & Reservoir and power stations with negligible storage.
Output Requirements
Water velocity and depth values at specified inter-vals along the channel.
Water veloQity and depth values at sections immediate-ly before the junction and at the section immed-iately after the junction.
Level and volume fluctuations, out-flow and inout-flow variations.
Flo\'/ rate 1 Head loss
variations, average electrical power produced.
Spillway flow
(it' any)
have been' fixed beforehand, then this particular endogenous
var-iable becomes a controllable exogenous·varvar-iable, that is a varvar-iable
or parameter that can be manipulated or controlled by the progran~er.
Non-controllable exogenous variables are generated by the
environ-ment in which the modeled system exists and not by the system itself.
Other endogenous variables may be the total flow past a point, the
average depth, or the deviation of the depth value at the point.
However, difficulty arises when determining the number of
exogenous variables, both controllable and uncontrollable, which
affect the endogenous variables. Too few exogenous variables may
lead to an inaccurate model, whereas too . many may make computer
simulation impossible because of an insufficient computer memory
capacity or may make computer programs unnecessarily complicated.
In models of hydro-electric power stations the latter may become a
problem, for most stations differ from each other and to allow for
these differences in a single computer program would be difficult,
Also, the consideration of things such as water hammer effects and
micro-second valve closings within the program may be necessary for
design and stress analysis purposes, but are superfluous in a program
which will model water flow over periods of days, months or years.
1.2.2 Model Complexity
The second aspect to be considered is the complexity of the
river system model. For such a model to be realistic, it must
necessarily be complicated in view of the large number of variables
and constraints inherent in any river system, and hence there is
the danger of constructing very complex programs which require an
unreasonable amount of computation time, regardless of how realistic
I
they may be. In general, any simulation program should be formulated
predictions about the behaviour of a given river system while
minim·-izing computation time. It should be tloted that the number of
variables in a model and its complexity are directly related to
computation time and validity, and altering any one of these
character-istics will result in an alteration of all the others. So in
7
the construction of a river simulation program some trade·~offs between these
characteristics will be inevitable.
1.2.3 Program Efficiency
This particular aspect is an important one, if simulation of
large river systems is to be a viable proposition. By program
efficiency or computational efficiency is meant the amount of
com--puter time required to achieve some specific numerical objective.
In relation to rj_ver system models, the main objective is the
min-imization of the amount of computer time required to generate values
of the endogenous variables over some specific time period being
simulated, such as six months or three years. Often this can be
achieved by employing a faster equation solving procedure to obtain
roots of polynomial equations, for example, in the first open channel
flow program developed by the author, replacement of the bisection
method for finding polynomial roots by the first order Newton
iter-ation procedure produced time savings of up to at least seventy per
cent. Other time savings may be made by storing oft-used values of
variables in the computer, instead of recalculating them for each
iteration loop.
1.2.4 Experimental Design Features
As these computer programs will be used in simulation
experi-ments, features should be built into them to allo>'l these experiments
example, to control water flow through a hydro-electric power station
either the turbines or spilhmys or both may be used. In this respect,
the section of the program that models a power station should have a
provision for varying spillway gate openings, the number of turbines
in the station and the flow through them. However, this means
com-plicating the program, and as stated in section 1.2.2, some
trade-offs will have to be made.
Before any simulation experiments can be run, the program has
to be validated; that is, all errors removed from it. 'l'his is
achieved by running the program on a set of data knotrm as a test case.
The correct output values for the test case are known, and for the
program to be error-free, its output and the known output values
should be identical. After the program has been validated, it ·
can'then be run on the data sets which constitute the .simulation
experiment.
1. 2.5 Realism
The remaining area of interest in model formulation is the
validity of the model or the amount of realism built into it. That
is, the adequacy of the model in describing the system of interest
or its accuracy in predicting the behaviour of the sys·tem in future
time periods. In models of a dynamic nature, such as a river system,
this realism is largely dependent upon the mathematical
representat-ions of the real-life situation. For unsteady open channel flow,
these mathematical representations are in ·the form of ordinary
differential equations. Their derivations however, were made on
the assumption that the water velocity was the same at all points
in any cross section of a river, an assumption trlhich simplified the
form of the differential equations (and hence made them easier to
solve), but \vhich introduces an error, as it is an approximation to
water-falls, tributary inflow and the like, must also be considered and
analysed to see if their inclusion or exclusion would seriously
affect the realism of the model. Difficulties arise when
attempt-ing to formulate a computer model of a power station, for realism
necessarily implies program complexity, which clashes with the need
to keep the program as simple as possible.
This conflict again emphasises the complete interdependence
of all the aspects of model formulation; that is, the nunwer of
variables to be included in the mocel, model complexity,
computat-:-ional efficiency of the program, the experimental compatibility of
the model and the model realism.
CHAPTER 'II
2.1 INTRODUCTION
After the river system model has been formulated, it then
has to be converted into a computer program. To do this a
program-ming or higher level language is normally used. One approach \.,rould
be to write the program for simulating a river system in one of the
\·;ell-known, general-purpose languages such as FOR"fRAN, ALGOL or IBM 1 s PL/I. This offers the programmer maximum flexibility in :
(a) the design and formulation of the mathematical
model of the river system being studied;
(b) the type and format of output reports generated; and
(c) the kinds of simulation experiments carried out with
the model.
The principal shortcoming of this approach is the difficulty
encount-ered in writing simulated programs in a general purpose programming
language, for the sequencing of the interdependent actions forming the
model is often extremely complex and hence a major source of error.
Another approach \·muld be to use one of the simulation lan9uages
that are aimed at simplifying the task of writing simulation programs
for a variety of different types of models and systems. Among those
that have been developed within the last ten years are DYNAl.\10, CSMP,
GASPII, SIMSCRIP'r and GPSS (2). These languages have been developed
with the following objectives in mind ( 3 )
:-(a) to produce a generalised structure for designing
simulation models;
(b) to provide a rapid way of converting a simulation
model into a computer program;
simulation model that can be readily reflected
in the machine program;
(d) to provide a flexible way of obtaining useful
outputs for analysis; that is, outputs in a
relevant fo~-ma t.
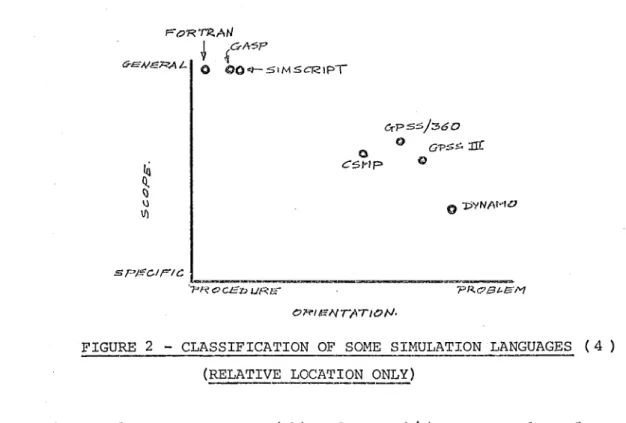
Most of these languages can be classified in terms of orientation
and scope or generality of application as in Figure 2.
Fo'RT'R.AN
.
*
~CrA-:',PG-E:N<EPAt. 0 OO<r-SIMSCRlPT
0
C~I'IP
erps:s}':360
O G'P5S. J!C
Q
FIGURE 2 -CLASSIFICATION OF SOME SIMULATION LANGUAGES (4)
(RELATIV~ LOCATION ONLY)
The two languages DYNAMO ( 2 ) and CSMP ( 4 ) are examples of
languages orientated towards models formulated in terms of non-linear
differential or difference equations, and variables that are
con-tinuous almost ever~~here in their range (some discontinuities can be
handled) are assumed. DYNAMO was originally developed for defining
models of business and CSMP for engineering design applications;
however, their applications could be interchanged. GASP and SIMSCRIPT
on the other hand, are very general, and both can do anything that can
be done in FORTRAN ( 4 ) • GASP differs from SIMSCRIPT in that the
former is not a complete language.
The simulation languages thus presented are only a fe>~ of the
many available and have been selected to shm"l' the wide spectra of
this.type of language, especially in relation to the more general
multipurpose ones such as FORTRAN or ALGOL.
2.2 THE CHOICE OF A LANGUAGE
As the simulation of river systems is mathematical in nature,
languages which are used for business data processing, such as COBOL,{5)
are automatically rejected because of their un.suitabili·ty. Also,
because of the inherent complexity of a river system.~ the choice is
further restricted to languages that are flexible and general in
application; that is, procedural rather than problem orientated,
excluding simu~ation languages which are orientated to a specific
type of problem.
In the final analysis, however, the decision whether to use a
particular language rests primarily on the following considerations
·-(i) the availability of the software, that is,
avail-ability on the desired computer;
(H) the availability of sufficient documentation;
(iii) the availability of programmers knm11ledgeable in
the particular language;
(iv) the necessary technical features, such as
trigonom-etric functions and the like, available in the
language. ·
Of the languages available on the Burroughs B6718 computer
of the University of Canterbury {ALGOL, FORTRAN IV, GASPII, DYNAMO,
SIMULA) at this time*, only FORTRAN IV and ALGOL satisfied all of
the four points previously mentioned. Of those two, FORTRAN IV
was selected by the author instead of ALGOL because of his greater
ing knmdedge of the former. Furtherrnore 1 in relation to river
systems, which are essentially dynamic in nature, specialist
languages (for example GASP) which cater for discrete event.systems
are automatically excluded.
FORTRAN IV consists of five major components: variables,
constants, subscripts, expressions and functions. The number of
different subroutines or functions available with this language is
limited only by the memory capacity of. the particular machine being
utilised. That is, the programmer has the flexibility of being
able to write almost any subroutine that he may need for a particular
simulation program, using a main program to call the specific
subroutinES when they are needed. For river/lake/reservoir/po\>ler
station systems, simulation programs. for each component of the
system \>Tould be written and combined into a single simulation program.
Needless to say, a modular approach of this type necessarily requires
that there be some degree of similarity in the basic structure of
the subprograms.
2.3 EXISTING OPEN CHANNEL FLOW PROGRAMS
To save programming time and to avoid possible duplication of
work, the author had considered modifying existing open channel flow
programs written by others.
examined on the basis of :
The programs selected by the author were
(i) the available documentation for the program;
(ii) the type of numerical procedures employed;
(iii) the simplicity of the program structure.
This last point is particularly important, for it means whether the
program can easily be altered or modified, or not. The choice in
section 2~2 of FORTRAN as a programming language placed little
written in ~ORTRAN. Of the six programs inspected (6), only three
v1ere found (RIVER, HYDRAC, CANAL) (6) that were suitable, in the
sense ·that they modeled unsteady flow in open channels. 'rhe structure,
tha·t is, the layout of the program ·logic, for two of the th:ree
programs was, on closer examination1 found to be extremely complex,
restricting alterations and modifications to very minor ones. The
third one of the group, on the other hand, had a relatively simple
s·tructure, but a limited sphere of application. This particular
program would have required extensive alteration to extend its sphere
of operations.
Thus, no suitable programs were found, although many useful
features of the programs were incorporated into RIVER2, RIVER4 and
WASP. A short review of RIVER, HYDRAC and CANAL appears in the
remaining portions of this chapter, showing why they were rejected
and any features which were utilised in RIVER2, RIVER4 and WASP.
2.3.1 The M.I.T. Unsteady Flow Computer Program (7)
This program was developed to determine "che characteristics of
flow· in open channels that resulted from hydro-electric power station
operation. To simulate open channel flow, RIVER (labelled as such
by the author for convenience) solves the differential flow equations
in Appendix A by the method of characteristics.
However, unlike the first order method detailed in Appendix B,
the method used in RIVER includes the second order terms in the
differential equations~ A large proportion of the complexity of
RIVER was due to this consideration of second order terms. Also,
unlike the other programs examined, RIVER has a complete documentation
which includes amongst other things, a derivation from first principles,
of the differential equations employed in the program.
computer runs by the author was that the programming language used
for RIVER was FORTRAN II, which is not a subset of FORTRAN IV, the
version of FORTRAN that is available on the Burroughs computer.
According to Sammett (8), FORTRAN IV is not a compatible extension
of FORTRAN II, but a new creation. To adapt RIVER to the Burroughs
computer would, therefore, require rewriting of the program.
Two features, or aspects, of this program were utilised in the
data input segments of RIVER2 and RIVER4. The first is the provision
tha·t the program has for handling irregular sec·tion geometry as well
as regular. RIVER has achieved this by requiring section tables
describing cross sectional area, hydraulic radius and water surface
width for a series of water depths for each section (refer to
nomen-clature) to be read in as part of the input data. '!'his provision
means that the program is flexible, but at the expense of input data
simplicity. The other feature is a linear int:erpolation routine for
the section tables; that is, if the properties of a channel vary
linearly, then only the tables for the end section need to be read
in, for the program interplates for the intermediate sections.
2.3.2 ~ogram HYDRAC
Written by A.G. Barnett of e1e Systems Laboratory of the Ministry
of Works, HYDRAC was designed to solve unsteady subcritical flows in
trapezoidal canals. Two alternative channel layouts are available
in this program, either a single channel with varying discharges
specified at each end, or a bifurcating system of three canals with
varying discharges specified at the three unconnected ends. The
finite difference scheme was used in HYDRAC and is an extension of
Barnett's previous work on rectangular channels (9), which is itself
an extension of the Richtmyer method (10). Bifurcation problems are
solved by a modified form of the method formulated in Stoker {11).
This program compiled and ran successfully on the Burroughs
computer, but the absence of any documentation save on input data
description, together with the intricate program structure, prevented
any detailed examination of it, and hence any modifications thereof.
For these reasons HYDRAC was shelved.
2.3.3 Program CANAL
Obtained from Mr G. Harris of Australia, this program solves
unsteady supercritical and subcritical flows in open channels, by
the method of characteristics as outlined in Streeter and Wylie (12).
CANAL (labelled as such by the author for convenience) , is restricted
to single channels of constant rectangular or trapezoidal cr~ss section.
The most notable aspect of this program was the simple, logical layout
of the program structure (see Fig. 3). This particular feature allowed
an easy understanding of the program, despite the fact that there was
very little documentation of the program.
1 INPUT DATA
r--CALCULATE MIN. VALUE OF 1 2
+I*
v AND TIME STEP DT
3 CALCULATE +VE CHARACTERISTIC
4 CALCULATE -ve CHARACTERISTIC (INC.
CHECK FOR SUPER OR SUBCRITICAL FLOW)
-
-5 OUTPUT VALUES
-6 CHECK IF SIMULATION OVER.
GO TO STEP 2 IF NOT
7 FINISH
The layout of CANAL has been incorporated into the RIVER2,
RIVER4 and WASP programs. A predominance of programming errors,
plus the absence of sufficient documentation prevented any
success-ful computer runs with CANAL.
CHAPTER III
DESCRIPTION OF THE COMPUTER PROGRAMS
3.1 INTRODUCTION
This chapter describes the computer program WASP writ·ten to test
the feasibility of simulating a river system with hydro-electric power
stations, on a digital computer. The main purpose of this program
would be to allow the user to model the flo~ pattern of a chosen system and then to appraise the effects of altering the flow pattern (e.g. by
building a hydro-electric power station across a river, increasing the
channel width, etc.) without resorting to hydraulic models or.to
experiments on the actual system itself.
A cursory ·examination o~ river systems by the author, indicated
that most of them could be viewed as a composition of natural or
artificial channels, lakes and hydro-eelectric power-stations; that
is 1 each system could be broken down into basic elemen·ts or components
common to each other. From another viewpoint, this means that providing
sufficient numbers of each of the components were available, any river
system, within reason, could be built. Designed along these lines,
WASP provides (that is, in relation to computer simulation of river
systems), the basic components in the form of three main subroutines:
RIVER3 {models unsteady flow in an open channel), JUNC'I'N (models flow
through a channel bifurcation) and POND (models the flow through a.
power-station with a storage reservoir or a lake with a controlled outlet,)
WASP itself is basically in four parts: CONTROL (main program)
and subroutines RIVER3, JUNCTN and POND. CONTROL is the key part,
for it runs the simulation of a river system; that is, it reads in
the values of the exogenous variables and the initial conditions,
starts the simulation clock, runs the system model (built up from I
RIVER3, JUNCTN and POND), prints out the values of the endogenous
variables and stops the simulation when the allowable time limit is
In the centre portion of th:i.s chapter the four parts of WASP are
detailed, together vdth a description of how they have been combined
to form WASP. The description of two other computer programs (RIVER2
and RIVER4) which were the forerunners of subroutine RIVER3, toget.her
with an explanation of the numerical method used to model unsteady
flow in open channels 1 appears in earlier sec·tions.
Other aspects of river systems such as rapids, waterfalls, river
meanders and tributary inflov1, all of which have been tacitly ignored
in the fonaulation of the programs, will be considered further on
in the chapter.
3.2 CHOICE ALGORITHM
Of the many mathematical methods available for solving the
partial differential flow equations, two are particulaJ;ly suitable for
use on a digital computer. These are
:-(i) the method of characteristics; and
(ii) the Implicit method.
The latter method requires the differential equations to the
trans-formed into the corresonding finite difference equations. These are
then solved by setting up as many equations as there are unknown
dependent variables and then solving them simultaneously. That is,
if a channel is divided into five reaches each DX long, then the unknown
dependent variables are the values of depth and velocity at time T + 6t
at each of the six sections along the channel. With the aid of a
.digital computer, ·the resulting twelve equations could be solved by
iteration. For a large number of sections~ the computations involved
become tedious. However, the restriction on 6t as encountered in the
method of characteristics (Courant condition) is removed and larger
values of 6t help to compensate for the tedious iteration. A more
detailed description of this method may be found in Ref. 13.
The method of characteristics is a well documented method and is
popular because it gives results with a reasonably high order of
accuracy in return for relatively easy programming. The only
drmV'-back that has been found with this method is the large amount of
computer time required by the simulation program whenever lengthy
real-time periods are simulated.
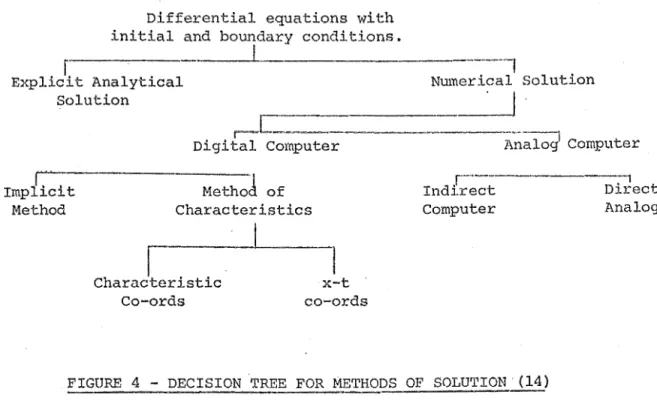
Because of the tedious computation involved with the Implicit
method and because of the extensive documentation on the method of
characteristics and a dearth of literature on the Implicit me.thod,
the method of characteristics was chosen instead of the Implicit
method. The decision tree in Fig. 4 presents these two algorithms
in relation to other procedures.
r
Differential equations with initial and boundary conditions.
Explicit Analytical Solution
---,
Nmnerical Solution
Computer Computer
I ..
i Impll.C tMethod
MethoJ of Characteristics
1....
.
l
x-t Characteristic
Co-ords co-ords
r-·--rndirect ComputerFIGURE 4 - DECISION TREE FOR METHODS OF SOLUTION (14)
;-1
D~rect
3. 3 OUTLINE OF THE METHOD OF CHARACTERIS'riCS
''l'he solution of steady flow in an open channel may be obtained
by the use of a combination of ·the specific energy, momentum,
continuity and Manning equations, depending on·whether the flow is
uniform or non-uniform. In the case of unsteady flow, the first
two equations cannot be used due to the assumption made during their
derivation (steady flow assumed). Therefore in trea·ting unsteady
flows it becomes necessary to reconsider the equations of motion in
relation to this type of flmV".
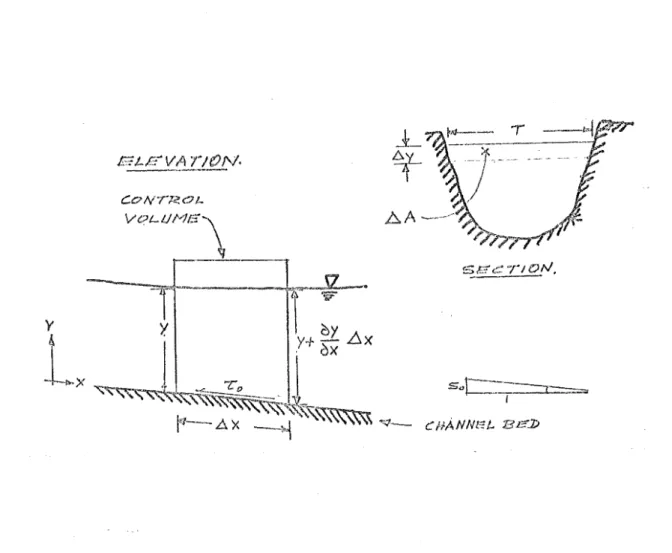
By considering a control volume of a channel with bed slope S0
and constant shear stress T on the bottom sides, two partial diff-o
erential equations for unsteady open channel flow are obtained. These 21
two equations are transformed into the ordinary differential equations (1)
by the method of charac·teristics (Appendix A)
where A dx dt
L
=
=
.,... - + dv
dt
+~
- A I A
A dy + !.Q. -gs =
dt pR 0
=
section area, T0
...
(1)=
top widthTo solve equations (1) a numerical step me·thod (involving finite
differences) together with initial conditions and boundary conditions
is used. Appendix B contains a derivation of the finite difference
equations from equatiorts (1) and details the solution procedure for
each of the two basic finite difference grids. For the programs
RIVER2 , RIVER4 , RIVER3 , (the latter being a WASP subroutine) 1 a
rectangular grid or net is employed in preference to a characteristic
grid. The use of a rectangular grid enables depth and velocity data
for all river sections to be calculated and printed out at one time
instead of irregular times as would be the case for a charac·teristic
3.4 RIVER2
This program was originally developed in the absence of other
suitable open channel flow programs {Chapter 2) and was later used as
a 11test bed11 for new numerical procedures before their insertion into
WASP. Basically, its formulation follows the mathematical procedure
outlined in Appendix B. The rest of this section is devoted to an
outline of the program structure and operation.
Referring to the macro-flow diagram (Fig.5), the main program
initially reads in the simulation ti·tle; simulation control data,
channel properties, initial conditions and boundary conditions. All
this data is then echo-·printed. The data for RIVER2 (and RIVER4)
differs from the subroutine RIVER3 of WASP in that there are no
provisions for S.I. units, and that only one value of Manning's n
for the whole channel is catered for.
The simulation time clock is then initialised and subroutine
THETA is called. This subroutine calculates the maximum time
incre-ment allowable under the Courant condition; and then sets the actual
time incremen·t to be 99% of this, i.e.
:-TH
=
0.99 x minimum value ofSubroutine INPOL2 is used by THETA to calculate AN and TN from the
section tables. This is accomplished by a linear interpolation
between the table entries.
Next the new values of velocity and depth VE & YE) at all the
internal grid points (i.e. all sections except the upstream and
down-stream boundaries) are calculated from the previous values (VI & YI)
INPUT ';DATA. FCI+o-Pi<!Nl·
J~o
_,.
Por:..A/..'-~-- \iwy:~~$
/
I
[;;hu '"
11; CDT w rrHI
:;:;.UBROUTINF~ THETA.I
llMe=TJMe+.J)TI
-~-. ~----~----...
l
r---1 p:ou=y PA"K.:.AM r:::n.=gsl
"")-J....S=:!5•:-' --'---tmFo-r< ~ UPeRC:I< /TI CAt...·I
23
I
_Fl-:"':l·
: C/I·LCU)..ATI:i-
J
C:::At...c]~-A~-~-·1
I
-'-In CHA-'R.~I.c:.-rt1)·"!,J-;-;nr::... -vc. CH/I'P-1\CTGP-ISTtc..I PaR :S~H3cg IT't cAL.. I'"' l-0\1/ FDH ~UPer-:..c~·.<<fTICAL. p:v_;\,J
I
l'*---·---~----~-1 I
I . CA!..C:Ul-AIE:
I
NE 'vi :Pf:EPT/-1I
f./VI) vr=Loc tTYI
y~3-l----~~L_
No
C-AI:.cu l-IITE
NEJI:j--:r>EP'Tif AND
VEhC'c:: IT'( V/\I.UE.5
FOF~ UP>Tt<.DAf\11
AN'D :PPWNS'fRE:AM
'f?,ouNJ;>AR..'/
=:-r-3cnoNS • _ J
PR~·iJfcncr
A1.1-J
N r= vJ 'Dr:Pn+ ,qi\L!) ve- t.cc ITY VA 1--!J !'.?' .sltMfi
.6t
1
---·---~ ·~---1-·--'"T---l----A B
/fi\
5(l:rsJO.s)(""f:.~NCL~
2 3 J;- '5 ~ .• ·- NSC·-1 NSC,
UPS"/7'!/E:AN E""lJMZ:!Al<V. ::Dt?W/'/5/RC~AI'-1
Z>fEPTN AND VSLOC.I/f BoUN:l.)AR'(.
/<NOkiN ALON<r Nf;:'RfE'.
/V.l?f N:5c X:S -niE NUNB!ER <!?P IHE
X>O t:.l# :S?7<ei\M 13 OIJNPAR'/ SEC/loll/.
FIG.6 - RECTANGULAR GRID FOR METHOD OF CHARACTERISTICS
For each point P in Fig. 6, the values of VIR and YIR are
calculated first by the subroutines RPCHIC and SLOPE (see Fig. 5 ) •
A check is then made by the program to decide whether the flow at the
section is super or subcritical. Depending on the outcome of
this check either VI
8 and YI8 or VIs' and Yis' are calculated by
subroutines RNCHIC (suitably modified) and SLOPE. Finally, using
equations (5) and (7) in Appendix A, the values of VEP and YEP are
extracted.
The remaining dept.h and velocity values to be calculated are
those of the upstream and downstream boundaries. In RIVER2 the
values of depth and velocity at the upstream botmdary are known at
all times along the time axis {Fig. 6), paired values of depth and
velocity at specified time intervals having been read in as part of
the input data. The values of YE and VE are linearly interpolated
0 0
from these paired values of depth and velocity.
At the downstream end, no problems are encountered when the
flow is either super or sub-critical. Equations (7) and (8) in
I
25
used to obtain YENSC and VENsc' When all the paired values (YE1,vE1),
(YE2,VE2), ••••• (YENSC'VENSC) 1 (see Fig. 6) have been calculated, they
are printed out by the program, which afterwards resets the YE and VE
values as the new YI and VI values.
Lastly, the simulation time clock is checked against the total
time allowed (TTIME) and if 'rTIM.E is exceeded, the simulation run is
terminated, otherwise the procedure outlined above is repeated.
FIGURE 7 - RIVER4 HIERARCHY
3.5 RIVER4
This program is identical to RIVER2 except that in subroutine
CHIC has been replaced by subroutine CHIC2. CHIC uses the method of
bisection to solve for values of VIR and YIR whilst CHIC2 uses the
faster Newton iteration procedure. A listing of RIVER4 may be found
in Appendix D together with a user's guide.
3.6 WASP
Program WASP (an acronym derived from "Water Activity Simulation
modelling the flows through the hydro-electric power-stations and
doi-m the river channels; it consists of four main parts, CON'l'ROL
(main progrant) and three subroutines: RIVER3, JUNCTN and POND. To
simulate a river system, the user first writes a new subroutine SYSTEM
using the three subroutines (RIVER3, JUNCTN and POND) to describe the
system; that is, these subroutines are used as "building blocks" to
construct the river system. 'rhis relationship is shown in :b,ig. 8.
The inter-relationships between the V'lASP subroutines are shown in Fig .10.
§upplied by WASP
I
CONTROL(main program)
Reads in data required for simulations.
Activates the simulation run by calling
sub-routine SYSTEM. Prints out results Terminates the simulation
n~-~r-·---~~
~:.:_:~'?_~~~nes)
j
Programmer written
'
~~'"""-=-"""'"---=--
SYSTEM· ~ (subroutine written by
user).
Calls a combina·tion of
, __ Ju~~~nd ~~
8 - THE CONCEPT OF WASP
Simulation control data, pmv-er station and channel properties,
·initial conditions and channel boundary conditions are read in and
echo-printed by CONTROL. This part of WASP then activate~ the
simulation run by calling subroutine THETA (same as that in RIVER2)
to calcula·t:e the time increment t:.t. Next, the programmer-written
· subroutine SYSTEM is activated and the \vhole network is taken through
27
\Q
lf\
.}
1--li)
1!.
.j
'I
-I
~
UJ
-l
\)
~
\l
(J
~
{),.
~
Q
~
<.
~
~
h
l-t
N
M
~~
Li
·
~
)[__-~-·-:~
0
~
:t.
\j
---(YE
1,vE1), ... (YENSC'VENSC}, together with collated statistics
from each power station are printed out by CONTROL, which then
resets the YE and VE values as the new YI and VI values. Finally
as in RIVER2 the simulation time clock is checked against the total
time allocated (TTIME} and if the cumulative time is less than TTIME,
the whole procedure is repeated, otherwise the simulation run is
terminated.
Fig. 9 shows ·the WASP hierarchy, the rest of the section
contains a description of the three basic subroutines, and a detailed
description of WASP may be found in Appendix
c.
3 • 6 .1 Sub-routine RIVER3
This subroutine is a modified version o£ RIVER4 in that
only subcritical flow is allowed for (due to the limitation imposed
by subroutine JUNCTN}, and that all the data that it requires is
read in by CONTROL. Also, there is a multiple choice of both
downstream and upstream boundary conditions, ranging from specified
velocity-depth input values,.to discharge into a large volume of water
(static water level). If RIVER3 encounters supercr:i.tical flow, an
error message is printed and the simulation is stopped. subroutine
RIVER3 differs from RIVER2 in the same manner that RIVER4 differs
from RIVER2 that is, the replacement of CHIC by CHIC2 (Fig. 9 ).
3.6.2 Sub--routine JUNCTN
This subroutine has been "~:v'ritten to solve the equations
associated with two channels (not necessarily the same) meeting to
form a third. As inferred in section 3.6.1, only subcritical flow
has been provided for. It has been assumed that both upstream
branches of the junction are subcritical and that the joining of
these· two flO\'lS produces a third subcritical flow - tlfis assumption
is reasonable if
29
downstream of the junction is approximately equal
to the sum of the cross-sectional areas immediately
upstream of the junction;
(b) the flow 'in both upstream channels is well into the
subcritical range;
(c) the included angle between the two joining channels
is small.
JUNCTN solves the bifurcation equations formulated in
Stoker (16) by the 1st order Newton i·teration procedure.
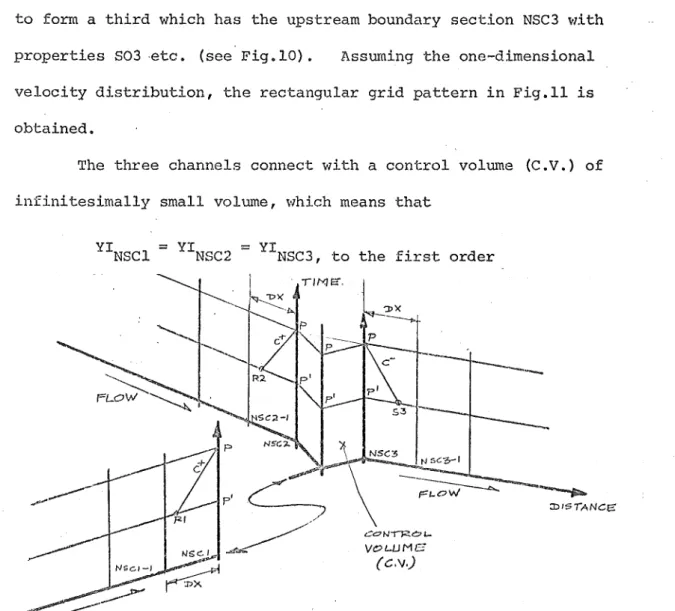
A Brief Description of the Formulation:
Consider two channels with downstream boundary sections NSCl
and NSC2, and with properties SOl, S02 (reach slopes) etc. joining
to form a third which has the upstream boundary section NSC3 -v1ith
properties S03 ·etc. (see Fig.lO). Assuming the one-dimensional
velocity distribution, the rectangular grid pattern in Fig.ll is
obtained.
The three channels connect with a control volume (C.V.) of
infinitesimally small volume, 'Vlhich means that
YINSCl = YINSC2
=
YINSC3, to the first orderSolving for YIRl' VIRl' YIR2, VIR2 , YI83 , VI83 by the 1st order
Newton iteration procedure and by substituting in equations
(5) and (7) in Appendix B, three equations (one for each branch) in
four unknowns (VENSCl' VENSC2 , VENSCJ' YENSCl = YENSC2 = YENSCJ) are
obtained.
= VINSCl -
·;g
•rRI
ARI (YENSCl -YIR1)-g(SF1- SOl) ~t ·
...
(2)VENSC2 = VINSC2 - AR2 TR2 (YENSC2 -YIR2) -g (SE'2 - S02) ·~t (3)
VE
=
VI+
I
g TS3NSC3 NSC3 AS3 (YENSCJ -YIS3) -g (SF3- S03) ~t .•• (4)
where SOl, S02, S03 are the bed slopes of reaches 1, 2 and 3, SFl,
SF2, SF3 are the friction slopes calculated from Nanning's equation
by SLOPE, and TRl, ARl, TR2, etc. are the top widths and section areas
corresponding to YIRl' YIR
2, YI83• volume gives the fourt~ equation
:-Applying continuity to the control
FN - VINSCl Al
+
VINSC2 A2+
VINSCJ A3 "" 0 (5)where Al, A2 and A3 are the section areas calculated by INPOL2 for YE
at NSCl, NSC2 and NSC3 respectively. The value of YE 'is obtained by
the procedure outlined in Fig. 11.
If the flow is unsteady, then the values of YENSCl' VENsel'
VENSC 2 , and VENSCJ will not be the same as YINSCl' VINSCl, VINSCZ'
and VINSCJ" Hence the procedure uses the method of bisection to
find YP. As FN is a function of YP, it is used as an indicator for
when the correct value of YP is obtained (i.e. when FN
=
0).Problems arise when supercritical flow is present in the
channels. For example, in the calculation of YIS
3and
vr
83• Asindicated in Appendix B, the point S3 moves upstream for supercritical
NIE' W CDE?TH ,·s
G"I"TI-/JE'J< VTKA_,>'.J'J(B
01< Y./J<c. CALC111..AIE:
/VF-'h/ VF-/-OC 17/l-i:S.
y ?'__. y P -"< _, 'l.T I<A .)
YTI<EJ../ Y:TI<C. J FNA..~
FNB All.l">FIVC ARe·
"DLJMf1Y VAT,...1Al3L€$.
: YTI<A = YPX
YYKB ""(YP+Y?X)/.Z
""'yr
L
1-CUI.-AT/:I:---t-=1>/A-= PN (y:r KA) rNB"'-;t=N (YJJ:J3) t=/V C =rtl fJ<C
31
SET-'
NO Y.T..CCA "' YJ!<A
Y::rJ<c""" Y.r.KB Y..7f.<B "'(Yfi<Ar
---]
Se:T:
'J::n<A""' Y:n<B · Y:rt<c~ Y.7k8'
present, there has been lit·tle accomplished concerning the
converg-ence ·of two supercritical flows, or of one supercr:i.tical and one
subcritical. For this reason, WASP has been restricted to
sub-critical channel flows.
3.6.3 Subroutine POND
Subroutine POND was originally written to simulate the water
flow through a po;qer station and reservoir; but later was expanded
to cope with
a lake or reservoir which has no power station associated with it, but
which has a controlled outflow.
For the power station and reservoir option, the following
-· procedure calculates the approximate water flow through the station.
(a) Initially, the nett inflow into the reservoir over
time period At is calculated. This inflow produces
an increase in lake level.
(b) Subroutine I~WOL3 calculates the allowed flow rate
·through the turbines (and therefore the total flow
over At), and together with any spillway flow, the
total outflow from the reservoir for At is obtained.
However, the effective or nett head changes as the
lake level changes, so the new reservoir level is
taken as an-average of the level calculated in (a)
and the final level. The difference beb.reen this
level and the level of the previous time step is
printed out as a reservoir storage or deficit depending
on the sign.
(c) Finally, values of depth and velocity at the downstream
sections of inflowing rivers and at the upstream section
of outflowing rivers (from the stilling basin) are
8
r
CALC:UL/+TL--
TOTAL-1/VF.Lotv p·o7c.: 'PI"Er-:.lo.D .b.·t, A N:D /VF!W LAkE OR
R.E 5 r::·1-? V..-:71:~ L
.:c;·
ve J_.2
TW<BINP-G.
C /\-/.... C i.J/....AT/3' · o urr-= L-OW 7HP,.c.?UC:.H GA7'l~o·.s.
CA LCUL/\IE! SIC':RACTE:::
IN LAI<E' 0~ 7<. L!.SEi" VOIR.
c
;A 1-c u
L.. A T,E ::P.C:P7H AND VA'J-OC ITY P'ORLJ P".-c:. "7""T: r: AM AN b
:DOW!VSTR IEAt1 RIV!E'R
B auNt::> A "RI e: .s.
33
NGO::/: POWcR-5/ATJON
W!TJ-} RE5£ERVOIR.
NG-0:: '2: LA!<~ W lrJi
Co~OLI-F-'.:D OUTJ. .. P-7:
The lake-only option uses half of the first optioni the
power-station section being side-stepped by the program.
The whole POND subroutine is an attempt ·to produce a program
which is not merely a water level-power outpu·t relationship, nor a
complicated mathematical procedure involving micro-second valve
closing times and water hammer effects, but a compromise between the
two types. Naturally, wa·ter hammer effects and valve closing times
are essential for design purposes1 but not so for a simulation program
involving time periods of days. A macro-flow diagram of POND is
presented in Figure 12.
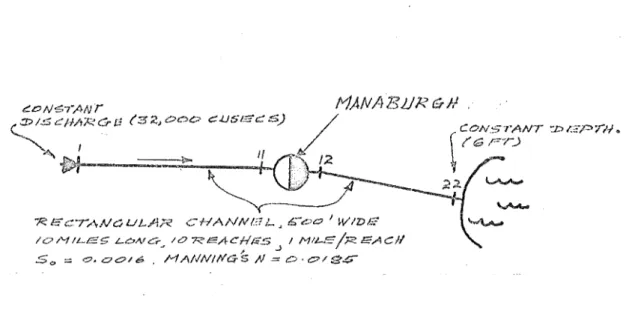
3,7 SIMULATING WITH WASP
As indicated beforehand, the progrrumaer is required to write
subroutine SYSTEM by using the three "building block" subroutines
supplied by WASP, to simulate the desired water resource system.
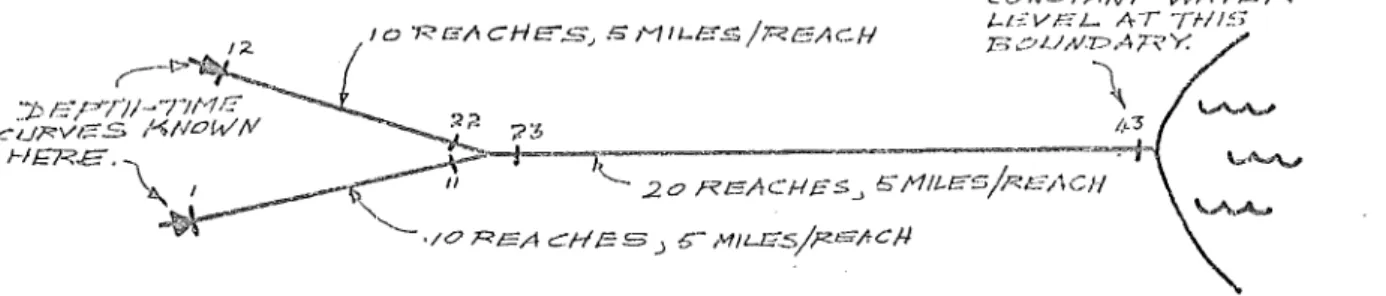
For example, consider the following system (E'ig .13 ) of two j1.mctions,
seven stretches of channel, one power-station and reservoir, and
one lake with a controlled outflow.
.PoWt::R :5TATICIN -r 7<ESEi"F-<:~t:?l.~ •
FIGURE 13 - EXAMPLE OF A WATER
CCNST,ANT ,5-r/Jo·c
.:5ro~A GG!'
Where R7 enters the sea, the stage has been assumed to be constant
because of the negligible effect of the river discharge upon the
sea level.
For this system, subroutine SYSTEM woul~ be as follows:
(FORTRAN IV) :
SUBROUTINE SYSTEM
35
CALL RIVER3 (argument list) + with correct options for boundaries of Rl
CALL RIVER3 +with correct options for boundaries of R2
CALL JUNCTN (boundary· sections of Rl, R2 and R4) + for Jl
CALL RIVER3 ( - - - ) +ditto for R3
CALL RIVER3 ( - - - - ) · ~- ditto for R4 CALL JUNCTN
CALL RIVER3
C---~--- R3, R4 & R5) + for J2
+ ditto for R5
CALL POND (Reservoir and Power station option) + for Pl
CALL RIVER3 + ditto for R6
only) +.for P2
+ ditto for· R7 CALL POND ( Reservoir
CALL RIVER3
RE'fURN
END
The data which 'Vlould have to be read in for a simulation run
for the above system would be as follows: (in addition to the control
data) :
1 .. Section geometry· for all sections in Rl to R7
2. Initial conditions at all sections in Rl to R7.
3. Section geometry and initial conditions for Jl and J2.
4. Rating curves for the peustocks, turbines, generators,
spill-way gates and tailwater level for Pl.
5. Reservoir level rating curve for Pl and P2.
6. Initial turbine flow rate for· P:t
level for Pl and P2.
7. Pai~ed values of depth-velocity against time or depth
against time for the upstrem boundaries of Rl, R2 and R3,
8. Discharge-time values for turbine flo\'l for Pl.
A detailed exa~ple of a simple water system showing input data and output values may be found in Appendix
c.
3.8 THE PROBLEM OF MEANDERS
Throughout the formulation of RIVER4 (and RIVER3), the effects
of a channel bend upon the water flO\v had been tacitly ignored. In
this section some of these effects are examined: their nature, the
extent of their influence and possible numerical representation.
3.8.1 Geometry and Flow Characteri~ics
The most characteristic features of all natural channels (and
some artificial ones), regardless of size, is the absence of long
straight reaches and the presence of frequent sinuous reversals of
curvature (15), which are comrnonly knm-m as river bends or meanders. (Strictly speaking the name meander is usually associated vlith river
bends which exhibit regular reversals as well as an overall path
symmetry). A statistical study by Leopold and Wolman (16) showed
that bends tended to be scaled versions of a given set of proportions,
that is, large rivers tended to have large bends and small rivers to
have small bends. An interesting aspect of this trend is that most
rivers tend to look similar on planimetric maps due to the ratio
of curvature to width (rw/w} for these rivers being close to each other.
Fig. 15b shows three examples in which the scales have been chosen such
that meander length is equal on the page.
A cross-section of a typical meander at A-A (Fig. 15c) would
show an asymmetrical shape which would be deepest near the concave