MULTI-OBJECTIVE OPTIMIZATION
OF LAMINATED COMPOSITE PLATE
USING A NON-DOMINATED SORTING
GENETIC ALGORITHM
SASIDHAR.G1*, MOSES DAYAN.G2, MALLESAM DORA.H3
1
Department of Mechanical Engineering, Adama Science and Technology University, Ethiopia, P.O.Box-1888 2
Department of Mechanical Engineering, S.R.K.R.Engineering College, Bhimavaram, India- 534204 3
Adama Science and Technology University, Ethiopia, P.O.Box-1888 E-mail: [email protected]
Abstract
Laminated composite constructions of panels and other structural elements are currently being used for many applications in aerospace, automotive, civil and defence industries. Laminated composites have general advantages over more traditional materials such as greater specific strength, specific stiffness, corrosion and fatigue resistance among others. Optimization of composite laminates with respect to ply angels to maximize the strength is necessary to realize the full potential of fiber reinforced materials. In this paper a modified Non-Dominated sorting Genetic Algorithm is used to obtain pareto-optimal design of composite laminate square plate. The objectives are to minimize the weight and deflection of graphite/epoxy square plate subjected to the constraint that the Tsai-Wu failure factor (ζ) should be less than or equal to one. The multi-objective optimization algorithm used in this paper has better sorting, incorporates elitism and no sharing parameter needs to be chosen a priori.
Keywords- Genetic algorithm, laminated composites, Stacking sequence, Composite plate, Pareto optimal set.
1. Introduction
The design of practical composite structures often requires the maximization or minimization of multiple, often conflicting, objectives. Walker and Kumar have tackled complex multi-objective optimization problems by scalarising the multiple objective functions into a single objective using a weight vector [1, 2]. A disadvantage of this approach is that the resulting optimal lamination scheme depends on the chosen weight vector. In general, a multi-objective optimization algorithm yields a set of optimal solutions, instead of a single optimal solution [3]. The reason for the optimality of many solutions is that no one solution can be considered better than any other with respect to the objective functions. These optimal solutions are known as Pareto-optimal solutions [4]. Deb [5] has tried to solve the multi-objective optimization problems by using a fast and elitist multi-objective genetic algorithm (NSGA-II). The primary goals of a multi-criteria optimization algorithm are to guide the search towards the global optimal front and to maintain population diversity in the Pareto-optimal solutions. Almeida [6] has tried to minimize the weight and deflection of the composite plate by genetic algorithm to solve stacking sequence. In the present paper, an improved methodology for the multi-objective optimization of fiber reinforced composite square plate for minimal weight and deflection via the layer wise tailoring of fiber orientations and fiber thickness is described. The first ply failure load is obtained using the Tsai–Wu failure criterion [7]. A modified form of multi-objective genetic algorithm, based on the elitist non-dominated sorting genetic algorithm (NSGA-II), is implemented to obtain Pareto-optimal designs for the chosen conflicting objectives. It explores the optimal design of a graphite/epoxy composite square plate for minimization of weight and deflection, with the constraint that Tsai-Wu factor should be less than or equal to one.
2. Proposed Multi-objective Optimization Algorithm
In the proposed modified Non- dominated sorting Genetic Algorithm the population is initialized first. Once the population in initialized, it is sorted based on non-domination into each front. The first front, F1, being
completely non-dominant set in the current population and the second front being dominated by the individuals in the first front only and the front goes so on. Each individual in each front are assigned rank (fitness) value based on front in which they belongs to. Individuals in first front are given a rank value of 1 and individuals in second are assigned rank value as 2 and so on.
selected population generates offspring from crossover and mutation operators, which will be discussed in detail in later section. The population with the current population and current offspring is sorted again based on non-domination and only the best N individuals are selected, where N is the population size. The selection is based on rank and on the crowding distance of the last front. The new generation is filled by each front subsequently until the population size exceeds the current population size. And hence the process repeats to generate the subsequent generations.
2.1. Population Initialization
The population is initialized based on the problem range and constraints if any.
2.2. Non-Dominated Sorting
The initialized population is sorted based on non-domination. An individual is said to dominate another if the objective functions of it is no worse than the other and at least in one of its objective functions it is better than the other. The fast sort algorithm [1] is given below:
For each individual p in main population P do the following
Initialize Sp = Ø. This set would contain all the individuals that are being dominated by p. Initialize np = 0. This would be the number of individuals that dominate p.
For each individual q in P
*if p dominated q,then
. add qto the set Sp i.e. Sp=Sp U {q}
* else if q dominates p then
. increment the domination counter for p i.e. np = np +1
If np = 0, i.e., no individuals dominate p, then p belongs to the first front; Set rank of individual p to one,
i.e., prank= 1. Update the first front set by adding p to front one, i.e., F1 = F1U {p}
This is carried out for all the individuals in main population P.
Initialize the front counter to one. i = 1
The following is carried out while the ithfront is nonempty i.e. Fi≠ Ø
– Q = Ø. The set for storing the individuals for (i + 1) th front. – For each individual p in front Fi
*For each individual q in Sp (Sp is the set of individuals dominated by p)
. nq = nq–1, decrement the domination count for individual q.
. if nq = 0, then none of the individuals in the subsequent fronts would dominate q. Hence set qrank = i+1.
Update the set Q with individual q,i.e., Q = Q U q.
–Increment the front counter by one.
–Now the set Q is the next front and hence Fi = Q.
2.3 Crowding Distance
Once the non-dominated sort is complete, the crowding distance is assigned. Since the individuals are selected based on rank and crowding distance, all the individuals in the population are assigned a crowding distance value. Crowding distance is assigned front wise and comparing the crowding distance between two individuals in different fronts is meaning less. The crowing distance is calculated as below:
For each front Fi, n is the number of individuals.
- Initialize the distance to be zero for all the individuals i.e. Fi ( dj) = 0, where j corresponds to the jth
individual in front Fi.
- For each objective function m
* Sort the individuals in front Fi based on objective m,i.e., I = sort (Fi,m).
* Assign infinite distance to boundary values for each individual in i.e. Fi
* For k = 2 to (n - 1)
1 . 1 .
. I (k).m is the value of the mth objective function of the kth individual in I
2.4 Tournament Selection
Once the individuals are sorted based on non-domination and with crowding distance assigned, the selection is carried out using a crowded-comparison-operator. The comparison is carried out as below based on
(1) Non-domination rank prank, i.e., individuals in front Fi will have their rank as prank = i, and
(2) Crowding distance Fi (dj)
Operate the crowded-comparison-operator between p and q, i.e., p ≺n q if
– prank<qrank
– or if p and q belong to the same front Fi then
Fi(dp) >Fi(dq) i.e. the crowing distance should be more.
2.5. Genetic Operators
The genetic operators, viz., Simulated Binary Crossover (SBX), polynomial mutation [1, 3] and, in particular for the composites, a ply swap operator [9] are used to create offsprings. The ply swap operator helps the GA to determine the optimal orientations for the inner part of the laminate by swapping plies from each section.
2.6. Recombination and Selection
The offspring population is combined with the current generation population and selection is performed to set the individuals of the next generation. Since all the previous and current best individuals are added in the population, elitism is ensured. Population is now sorted based on non-domination. The new generation is filled by each front subsequently until the population size exceeds the current population size. If by adding all the individuals in front Fj the population exceeds N, then individuals in front Fj are selected based on their crowding
distance in the descending order till the population size becomes N. And hence the process repeats to generate the subsequent generations.
3. Problem Formulation
In the multi-objective formulation for the optimization of plate problem, we choose the maximum number of laminas in the laminate a priori to be Nmax. A laminate design, x, is represented by a real-valued array which consists of the fiber orientations, Φ(n), and thicknesses, h(n), of the laminas.
X = {{ Ф(1) ,Φ(2) , …, Φ(Nmax) }, { h(1) , h(2) ,…, h(Nmax) }}. (1) Thus, there are 2 Nmax decision variables.
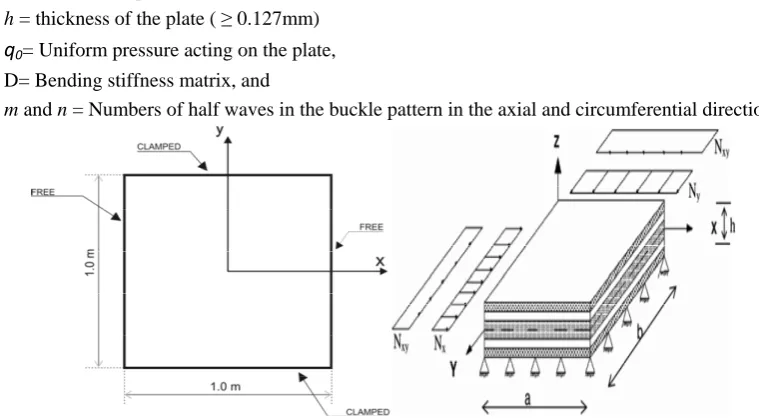
Let us consider a square plate subjected to a uniform distributed load on its surface: q = q(x, y) as shown in figure 1.
3.1 Nomenclature
a= Length of the plate, b= Width of the plate,
h = thickness of the plate ( ≥ 0.127mm) q0= Uniform pressure acting on the plate,
D= Bending stiffness matrix, and
m and n = Numbers of half waves in the buckle pattern in the axial and circumferential direction.
3.2 Analytical Expressions
Let us consider a square plate subjected to a uniform distributed load q = q(x, y). Sides of the square plate are a, b. In the general case, the transverse load can be expanded as a double Fourier sine series [8].
, ∑ ∑ sin sin (2)
Where the coefficients are given by:
, sin sin . (3)
In the case of uniform loading, q(x) = constant =q0.
The deflection at the point (x, y) is then:
,
(4)
Where
∑
∞ 1∑
∞1 sin 2 1 sin 2 1The deflection is maximum at the center of the plate, x = a/2, y = b/2 and the deflection of the plate under transverse load with simply supported condition can be calculated as:
maximum deflection (5)
Where,
∑ ∑
1
,
2 2 , = Uniform pressure acting on plate.
3.3 Failure Criteria
The Tsai-Wu failure criterion [7] is employed here to assess the capability of the composite square plate to withstand failure due to overstressing. A strength failure load factor is used to identify the characteristics of the first-ply failure of the square plate. Based on the Tsai-Wu failure criterion, the strength level factor ζ is defined as
2 1 (6)
In the above Equation, each stress component of the kth layer, σL (k),σT(k) ,σLT(k) in the material direction can be calculated by
σ LT T Q A N (7)
where {N}xy is the resultant tensor [Nx,Ny,Nxy]T; [A]-1 the inverse of the extension stiffness matrix [A]; Q is the reduced stiffness of the kth layer of the laminate; and the strength parameters F11, F12, F22, F66, F1 and F2 are given by
1
1
(8) Where , , and are the tensile and compressive strengths of the composite material in the longitudinal and transverse directions, and is the in-plane shear strength.
In order to ensure that first-ply failure does not occur in the composite plate, Tsai-Wu factor should be less than or equal to one, i.e.,
ζ 1 (9)
3.4 Objective Function
Minimize: F1=deflection= (10)
Where ∑ ∑ ,
3.5 Constraint
Tsai-Wu factor should be less than or equal to one
i.e., ζ 1 (12) 4. Numerical Results and Discussions
The composite laminate square plate problem consists in a multi-objective optimization since weight and deflection are supposed to be minimized at the same time. Each one of these two objectives is opposite to the other because improvements in one of them lead to depreciation of the other. As a result of such characteristics this problem has a set of optimal solutions (pareto-optimal set) instead of a single solution as usually is found in simple optimization problems. The material failure is taken as the optimization constraint.
Table 1. Material properties of graphite/epoxy
Property Graphite/epoxy
Longitudinal Modulus,E1 181.0 Gpa
Transverse modulus,E2 10.3 Gpa
In-plane shear modulusG12 7.17 Gpa
Poisson ratio,v12 0.28
Density, ρ 16.05Kn/m3
Thickness, t 0.000127m
Cost factor ,C 8
Long. Tensile strength, 1447.0 Mpa
Long. Comp strength, 1447.0 Mpa
Trans. Tensile strength, 51.7 Mpa
Trans. Comp strength, 206.0 Mpa
In-plane shear modulus, σTLU 93.0 Mpa
The structure must support a design pressure load of 0.1 MPa with no material failure (Tsai-Wu failure function must be lower than 1.0 for the whole plate) and no more than 2mm of contiguous plies thickness with the same fiber orientation are allowed [6]. The material properties are given in the Table 1. The optimization variables are the fiber orientation and the thickness of each layer defined and coded as given in Table 2.
Table 2. Gene alphabet and variable values
Orientation code
Gene alphabet orientation angle
Φ(n)
Material code
Gene alphabet ply thickness
h(n)
1 1 ply at 00 1 0.75 mm
2 1 ply at -450 2 1.00 mm
3 1 ply at +450 3 1.50 mm
4 1 ply at 900 4 2.00 mm
The composite plate with graphite/epoxy composite lamina is a multi-objective optimization problem, solved by modified NSGA-II using MATLAB software. The results obtained by the present algorithm are compared with those of GA [6].
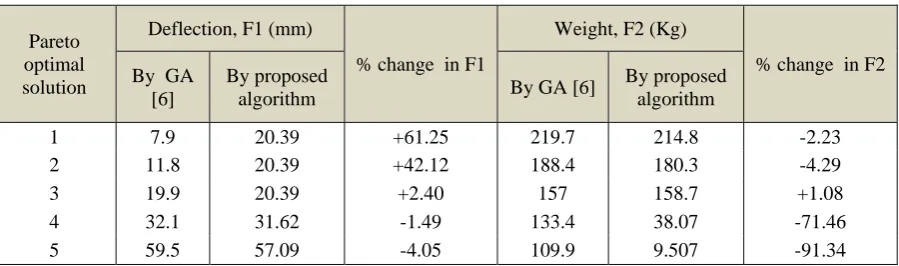
Table 3. Comparison of GA values with modified NSGA-II for composite plate with single material (Graphite/epoxy)
Pareto optimal solution
Deflection, F1 (mm)
% change in F1
Weight, F2 (Kg)
% change in F2 By GA
[6]
By proposed
algorithm By GA [6]
By proposed algorithm
1 7.9 20.39 +61.25 219.7 214.8 -2.23
2 11.8 20.39 +42.12 188.4 180.3 -4.29
3 19.9 20.39 +2.40 157 158.7 +1.08
4 32.1 31.62 -1.49 133.4 38.07 -71.46
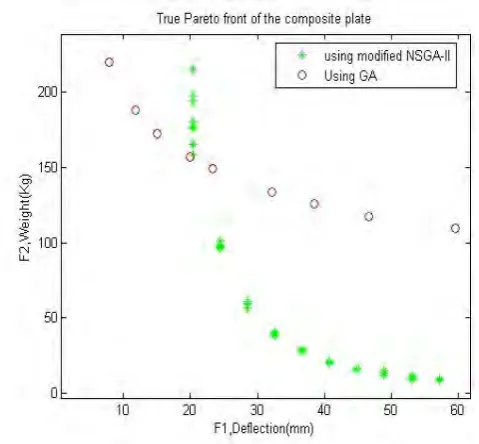
Figure 2. Comparison of pareto-optimal solutions for weight and deflection
Figure 2 shows the Pareto optimal solutions obtained by GA [6] and modified NSGA-II. Table 3 shows the 5 best solutions obtained by the two algorithms. Pareto optimal points 4 and 5 yields better results than GA by less than 70% in weight. For the deflection function pareto-optimal points 1, 2 and 3 are not much effective, but 4 and 5 shows 1 to 4% decrease in deflection.
5. Conclusions
In this paper a modified version of the NSGA-II is proposed for the multi-objective optimization of laminated composite plate structures. The fiber orientations and thicknesses are chosen as the optimization variables. The layer wise material properties are estimated using simplified micromechanics equations. The proposed algorithm has been extended to include an archive of the non constraint dominated set, which is updated at each generation. In addition to the non dominated set, a new parameter called crowded distance is used to obtain a termination criterion that automatically stops the algorithm when the maximum number of generations has been reached.
The results obtained by the proposed algorithm are compared with the results reported in the literature [6] for the single composite material plate (graphite/epoxy) plate under transverse loading. The results demonstrate the effectiveness of the proposed methodology for the multi-objective optimization of composite structures. The proposed algorithm can be extended to solve other composite laminate structures with multiple objectives such as laminated composite plate with multiple layers, laminated composite pressure vessels, etc.
References
[1] Walker M, Smith RE, “A technique for the multi-objective optimization of laminated composite structures using genetic algorithms and finite element analysis”, Composite structures; Vol.62, No.8, 2003, pp.123-128.
[2] Kumar N, Tauchert TR, “Multi-objective design of symmetrically laminated plates”, Journal of mechanical design; Vol.114, No.4, 1992, pp.620-625.
[3] Kalyanmoy Deb and R. B. Agarwal, “Simulated Binary Crossover for Continuous Search Space”. Complex Systems, Vol.9, April 1995, pp. 115-148.
[4] Deb K, Multi-objective optimization using evolutionary algorithms, John Wiley and Sons Ltd, 2001.
[5] Deb K, “A fast and elitist multi-objective genetic algorithm NSGA-II” Evolution of Computers, IEEE transaction, Vol.6, No.2, April 2002, pp.182-196.
[6] Felipe Schaedler de Almeida, “Optimization of composite plates and shells using a genetic algorithm and the finite element method”, (In Portuguese) M. Sc. Thesis – PPGEC/UFRGS, Porto Alegre, Rio Grande do Sul-Brazil; Vol.90, March 1999, pp. 35-190.
[7] Tsai SW, Wu EM, “A general theory of strength in anisotropic materials”, Journal of Composite materials. Vol. 5, No.1, 1971, pp. 58-80.
[8] Autar K. Kaw, Mechanics of Composite Materials, second edition, Taylor & Francis publishers, 2006, pp.431.