AUSTRALIAN JOURNAL OF BASIC AND
APPLIED SCIENCES
ISSN:1991-8178 EISSN: 2309-8414 Journal home page: www.ajbasweb.com
Open Access Journal
Published BY AENSI Publication
© 2016 AENSI Publisher All rights reserved
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/
To Cite This Article: N. Magadevi and Dr.V.Jawahar Senthil Kumar., Efficient Distributed Localization Algorithm for Wireless Sensor Networks. Aust. J. Basic & Appl. Sci., 10(1): 730-734, 2016
Efficient Distributed Localization Algorithm for Wireless Sensor Networks
1N. Magadevi and 2Dr.V.Jawahar Senthil Kumar
1Research Scholar, Anna University, Department of Electronics and Communication Engineering, Chennai, India. 2Associate Professor, Anna University, Department of Electronics and Communication Engineering, Chennai, India.
Address For Correspondence:
Dr.V.Jawahar Senthil Kumar, Associate Professor, Anna University, Department of Electronics and Communication Engineering, Chennai, India.
Tel: 9940463678; E-mail: [email protected]
A R T I C L E I N F O A B S T R A C T Article history:
Received 19 December 2015 Accepted 9 December 2015 Available online 4 January 2016
Keywords:
IoT, Wireless Sensor Network, Distributed localization, Mobile anchor node, Path planning scheme
Background: WSN covers a wide spectrum of military and hospital monitoring, military surveillance, fire and intruder detection and animal tracking. Objective: Among the various applications mentioned above, WSN plays a vital role in Internet of Things (IoT). It allows us to develop an intelligent system when there is a dynamic change in the environment. Results: It is shown that the localization error of the proposed system is less than the existing system. So it is a precise efficient localization for WSN. Conclusion: The proposed WSN uses distributed, RSS based and mobile beacon localization algorithm which gives relatively high precision. It can be used in a dynamic environment. It can reduce the energy consumption and also localization error.
INTRODUCTION
Today there are smart environments through which different kinds of devices are connected with each other with the principle of IoT. To describe the world around us using IoT , WSN provides precise accuracy. It is seen that the node cost is less than one dollar and can be implemented in hundreds or thousands of nodes in a wireless sensor network. Hence WSN is composed of multiple sensor nodes that computes, communicate with each other via a wireless network and data of each node are integrated. Application scenarios of WSN cover a wide spectrum of military and hospital monitoring, military surveillance, fire and intruder detection and animal tracking. Each node is able to sense, simple computation and communicate with each sensor or to the central unit.
One way of deploying the WSN is to scatter the motes throughout some region of interest. Communication in the WSN is based on adhoc networking technology. Zigbee, based on IEEE 802.15.4 is a protocol used to provide reliable information exchange among the devices. Zigbee based WSN are becoming a key force that promotes the advancement of it.
II.Problem Definition:
used in WSN known as anchor or beacon. All unknown sensor node can be localized using local information exchanges with respect to the anchor.
III. Classification Of Localization Algorithm:
The WSN localization algorithm is broadly classified as centralized and distributed localization algorithms.
a. Centralized localization algorithm:
In the centralized localization algorithm [Y.Shang et.al. 2003] , each and every mote has to communicate with the central unit. Central node must have a plenty of computational power. It provides precise location. But there will be larger network communication traffic and it is a burden to the central unit. So it is applicable only for small static WSN.
b. Distributed localization:
In the distributed localization [Koen Langendoen ,Niels Reijers, 2003], each node independently determines its location with multi hops. It reduces network traffic, gives equal burden to each node and it provides good scalability.
Another classification is range based localization method and range free localization method.
a. Range based localization algorithm:
It depends on the distance or angle between the nodes to obtain the unknown sensor node’s localization [P.Bahl and V.N.Padmanabhan , 2000]. It gives more accurate localization. But it requires expensive hardware and affected by the environment.
b. Range free localization algorithm:
Range free localization techniques [B.Xiao et.al. 2007] estimates the node location based on the connectivity information. So these methods do not require additional hardware which results in low cost and small communication traffic. Another classification is static and mobile localization algorithms.
a. Static localization algorithm:
If the sensor node and the anchor is static, it is called as static localization. Here central unit is equipped with GPS and the others, obtain their location by either range free or range based algorithm.
b. Mobile localization algorithm:
The range-based localization protocols uses ranging measurements. Consequently, the localization precision is limited depending on the network topology and the deployment strategy. Since a uniform network deployment is not possible in practice, some portions of the network may have a lower density and the neighbours of a node may not be sufficient. Furthermore, the locations of the anchor nodes may not be optimal for each node in the network. Since the topology of the WSN rarely changes because of the limited mobility, the localization accuracy of particular nodes cannot be enhanced through these techniques.
RESULTS AND DISCUSSION
The proposed method utilizes the mobile localization algorithm. The sensor network taken is static. Mobile anchor is moving in the field. The path of mobile anchor plays a vital role. In this paper we introduce the path which optimizes the trajectory. The ranging technique is based on received signal strength measurements. The unknown sensor node estimates the distance using the power of receiving a signal and path loss model. Anchor node broad cast periodic beacon messages which are used to estimate the distance to them. The received signal strength from sensor node i at node j at time t is represented by Pij R(t), which is formulated as
Pij R(t)=Pi T −10η log(dij)+Xij(t)
Where Pi T is a constant due to the transmitted power and the antenna gains of the sensor nodes, η is the attenuation constant and Xij(t) is the uncertainty factor due to multi-path and shadowing.
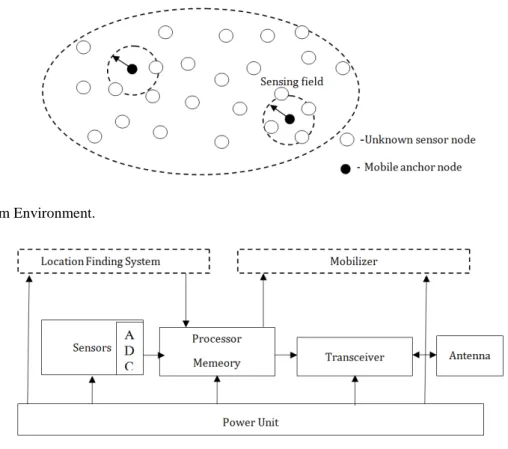
Figure 1. Illustrates the system environment where a sensor network consists of number of unknown sensor nodes and limited mobile anchor nodes. The sensor nodes are randomly distributed in the sensing field. They stay at their locations and sense the tasks.
system. This may consists of a GPS or software module that implements localization algorithms. A mobilizer is needed to move the node when it is necessary to carry out the tasks.
Fig. 1: System Environment.
Fig. 2: General architecture of wireless sensor node.
Path Length analysis:
Various path planning schemes are discussed in [Chia-Ho Ou, et. Al. 2013 ] . SCAN cannot guarantee that the length of each chord exceeds certain threshold and also suffers from colinearity. DOUBLE SCAN gives a redundant beacon point which increases the overhead and also more expensive.
Double Scan
−
+
+
−
=
2
'
'
2
'
'
'
1
'
2
'
'
2
R
R
R
L
L
R
R
L
Pathlength
HILBERT cannot guarantee that every sensor node will obtain more beacon points required to construct 2 chords of communication circles.
Hilbert ' ' ' 2 R R L Pathlength =
CIRCLE can only guarantee that the 4 corners of the field are covered by expanding the diameter of concentric circles. But energy consumption increased.
CIRLCE n R i R R Pathlength n i ' 1 2 ' ' 1 + + + =
∑
= π πS CURVE cannot guarantee that each node can construct 2 valid chords.
S CURVE
(
)
+ − + + + − = 2 ' ' ' 2 ' 1 ' 2 3 '' π Rπ
R L L R R L Pathlength
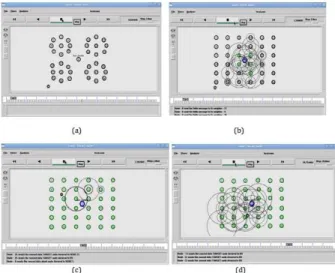
Simulations are done and the results are shown in Figure 3. Z curve is used as path of the mobile beacon (Javad Rezazadeh 2014). In the proposed method ,first the sensor field is divided into four grids each having nine sensor nodes as shown in figure 3 (a). Each node then exchanges the hello messages as shown in figure 3 (b). Then a mobile beacon moves in the field and the other nodes get their location based on the beacon Figure 3 (c) and (d).
Fig. 3: Simulation results of WSN with 36 nodes with one mobile anchor.
Fig. 4: Comparison of localization error.
Conclusion:
In this paper, we have developed WSN which uses distributed, RSS based and mobile beacon localization algorithm with gives relatively high precision. It can be used in a dynamic environment. The results shown that the localization error is less than the existing system. It can reduce the energy consumption also. In future it is planned to determine a predetermined path with a particular sensing range for the mobile beacon.
REFERENCES
Anusha, A., Kannan, 2006. “Simulated annealing based Wireless Sensor Network Localization”Journal of computers, 1(2): 15-22.
Xiao, B., 2007, “A walking Beacon-Assisted Localization in wireless sensor networks”, Proc. IEEE Conf. Comm, 3070-3075.
Chia-Ho Ou, 2013. “Path planning Algorithm for Mobile Anchor-Based Localization in Wireless Sensor Network”, IEEE Sensor Journal, 13(2): 466-475.
Koutonikolas, D., 2007. “Path planning of mobile landmarks for localization in wireless sensor networks”Comput.Comm, 30(13): 2577-2592.
Niculescu, D. and B. Nath, 2003. “Adhoc Positioning System using AoA”Proc. IEEE INFOCOM, 1734-1743.
Feng Zhao, 2005. Wireless Sensor Networks ,Microsoft Corporation, Elsevier Morgan Kaufmann Publishers.
Han, G., 2011. ”Path planning using a mobile anchor node based on trilateration in wireless sensor networks” Wireless Commun, Mobile Compu.
Li, H., J.Wang, 2008. “Real – time path planning of mobile anchor node in localization for wireless sensor networks” Proc. Int. Conf. Autom, 384-389
Localization in Wireless Sensor Network” IEEE Sensor Journal, 14(9): 3052-3064
Koen Langendoen, Niels Reijers, 2003. “Distributed Localization in Wireless sensor Network: A Quantitative comparison” Elsevier, 499-518.
Bahl, P. and V.N. Padmanabhan, 2000. “RADAR : An In –Building RF Based User location and tracking system” Proc .IEEE, 775-784.
Huang, R. and G.V. Zaruba, 2007. “Static path planning for mobile beacons to localize sensor networks” Proc IEEE int.conf, 323-330.