Improving the Accuracy of Location Algorithms
in Wireless Sensor Networks with DTN and Grey
Prediction Model
Neha Dhiyani Surya Prakash Sharma
M. Tech. Student Assistant Professor
Department of Computer Science & Engineering Department of Computer Science & Engineering Noida Institute of Eng. & Technology, Greater Noida, India Noida Institute of Eng. & Technology, Greater Noida, India
Abstract
This paper presents a DTN location algorithm that uses wireless sensor network and employs grey prediction to improve the accuracy of different location algorithms (KNN, SMP, TN, and DTN). Results have verified that grey prediction can predict the tendency of RSSI and reduce the fluctuation of RSSI when mobile user is moving. DTN cooperates with grey prediction achieved smallest mean distance error for run-time and off-line stage when mobile user goes away from the fixed sensor node. Localization algorithms integrated with grey prediction at run-time also have smaller mean distance error than location methods without grey prediction.
Keywords: Localization, KNN (K-Nearest Neighbors), SMP (Smallest Polygon), DTN (Dynamic Triangular Node), RSSI (Received Signal Strength Indication)
________________________________________________________________________________________________________
I. INTRODUCTION
Localization is a very important issue in sensor networks. In the sensor network the location of the node is unknown in almost all applications. Also the nodes may be mobile. Thus localization is critical. The device whose location is to be estimated is called localization node, and the network entity with known location is called localization base station. Localization is usually carried out by measuring certain distance dependent parameters of wireless radio link between the localization node and different localization base stations. The parameters can be measured at the localization node or at the localization base station. The travelling time of a signal between the localization node and localization base station can easily be calculated. The time is proportional to the distance of them and it can be used as parameter of localization. It is referred to as time of arrival. There are many different algorithms to resolve these challenges. Every algorithm has its own merits and demerits. Some algorithms are best for accuracy and some for low cost, but it is difficult to get low cost and high accuracy at the same time from a single algorithm. There are two situations when this problem gets more critical; when there are too many nodes in network and when the environment is hazardous. No single method has yet been adapted for outdoor environments.
II. MOTIVATION
Despite the attention the localization problem in WSN has received, no universally acceptable solution has been adopted for realistic, outdoor environments. There are several reasons for this. One reason is that, in order to obtain higher location accuracy, localization protocols either make simplifying assumptions (e.g., line of sight with sensor nodes high density of anchor nodes, deployment knowledge) or require sophisticated hardware. In large scale, realistic out-door deployments, these assumptions do not always hold, and equipping all sensor nodes with expensive hardware is not feasible. Another reason is that localization protocols that do not have strong simplifying assumptions are generally inaccurate.
This dissertation focuses on to develop a method to obtain highly accurate node locations in large scale sensor networks deployed in complex environments, at the lowest cost possible. The key advantages of the proposed method over other methods are:
Does not require high power beacons, Provides better localization accuracy and Helps in reducing collisions.
Low cost
(IJSTE/ Volume 3 / Issue 07 / 004)
III. PROPOSED WORK
The proposed scheme uses grey prediction method to predict the tendency of received signal strength indication. A dynamic triangular (DTN) location method is also designed and is compared with other classical location finding methods. The mean distance error of RSSI for mobile user is greatly reduced and use of DTN provides more accurate predicted position. Even with extremely noisy measurements in a cluttered indoor setting, nodes are not required to be stationary during measurement or learning. Through simulation in Matlab, the accuracy of the proposed prediction algorithm and the simplicity of its implementation are validated. The proposed scheme is validated through extensive simulations.
IV. DTN ALGORITHM
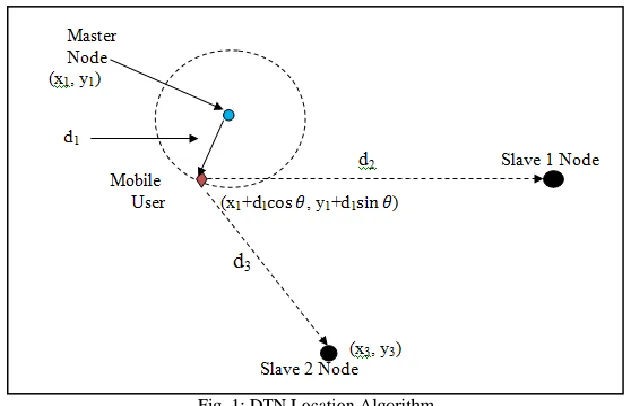
DTN algorithm (figure 1/0 requires at least three sensor nodes to estimate location of mobile user. Four sensor nodes are chosen in this case. DTN discards the worst RSSImeasured by a sensor node and uses the other sensor nodes to estimate location. DTN chooses the sensor node which receives greatest RSSI to take as master node, and assumes the mobile user’s location in mapping circle of master node. The mapping circle is the estimation distance d1 between mobile user and master node. DTN finds the angle θ on mapping circle by using a cost function to pick one that best matches the observed distance. DTN comprises the following step:
Generation of Mapping Circle
DTN finds possible locations of mobile user (x1+d1cosθ, y1+ d1sinθ) on the mapping circle by using the possible distances (d2θ and d3θ) between mobile user and Slave nodes.
The Distance of Mobile User Estuation
DTN Find the error between estimation distances (d2 and d3) and possible distances (d2θ and d3θ).
The coordinate of Mobile Approximation
DTN calculates the cost functions at each angle θ and the θ increase 1 degree each time. DTN search the minimum cost function, and the θ of minimum cost function is estimation angle on the on the mapping circle. The Angle θ on mapping circle is the estimation location D̂ of mobile user.
Fig. 1: DTN Location Algorithm
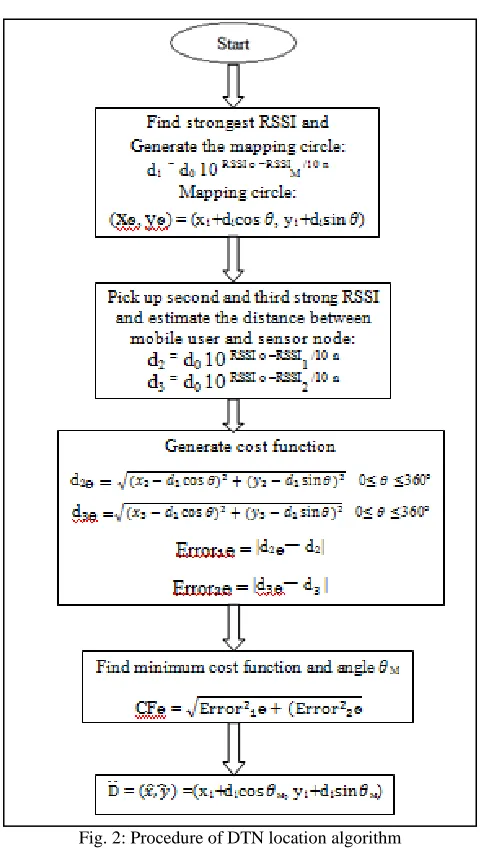
Figure 2 describes the procedure of DTN location algorithm. At last the local coordinate 𝐷̂is shifted and global coordinate of mobile user (x1+d1cosθ, y1+d1sinθ)is found.
This location method is compared with the other algorithms (KNN, SMP and TN), and ‘Mean distance error’ metric is employed to analyze performance of different location algorithms at off-line stage. Mean distance error is computed by equation (3.9), N denotes the number of estimation locations, (𝑥,̂ 𝑦̂) means the estimation coordinate, and (x, y) indicates the true location of the grid:
MSE =1
N∑ √(x − x̂)² + y − ŷ)²
N
Fig. 2: Procedure of DTN location algorithm
V. GREY PREDICTION MODEL
RSSI predictive based model is used to improve the accuracy of mobile user’s location. For tracking mobile user, the proposed grey prediction approach utilizes the grey system to predict RSSI. Dynamic RSSI of X (1)is modeled using first-order ordinary different equations as follows:
dX⁽¹⁾ dt + a X
(1)= b
X(1)is the accumulated generating operation that can be obtained by
X (1) = (x (1) (1), x (1) (2), x (1) (3),..., x (1) (n)) Where
𝑥(1)(𝑘) = ∑ 𝑥0(𝑚), 𝑘 ∈ {1, … , 𝑛}
𝑘
𝑚=1
X (0) = (x (0) (1), x (0) (2), x (0) (3),..., x (0) (n ) ) is the original data sequence, where x (0) (k) represents RSSI at time t. Equation (3.10) is called “white descriptor” for modelling a white system and its parameters (a, b) can be found directly from the observed RSSI. By solving the differential equation (3.10), prediction equation is obtained:
𝑥̂(1)(𝑘 + 1) = (x(0)(1) − 𝑏 𝑎) 𝑒
−𝑎𝑘+𝑏 𝑎
VI. RESULTS
(IJSTE/ Volume 3 / Issue 07 / 004)
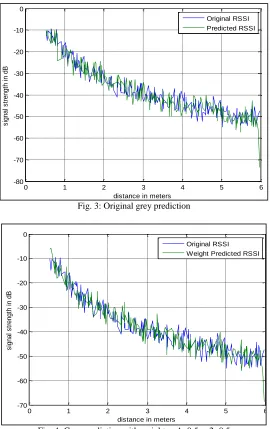
Fig. 3: Original grey prediction
Fig. 4: Grey prediction with weights w1=0.5, w2=0.5
VII.CONCLUSION
DTN algorithm for the localization of wireless sensor nodes has been presented in the paper which in turn has proved to be efficient enough to improve the accuracy of several location algorithms i.e. KNN, SMP, TN and DTN. Additionally the results of the paper have verified that grey prediction is capable of predicting the RSSI and at the same time reduces the fluctuation when the mobile user is moving. Localization algorithms integrated with grey prediction at run-time also have smaller mean distance error than location methods without grey prediction.
REFERENCES
[1] D.Culler, D.Estrin and M.Strivastava, Overview of Sensor Networks IEEE Computer Society, 2004.
[2] Y. Gwon, and R. Jain, “Error Characteristics and Calibration–free Techniques for Wireless LAN-based Location Estimation,” In Proceedings of MobiWac, section 1pp, 2-9, Oct. 1, 2004
[3] David Moore, John Leonard, Daniela Rus, and Seth Teller. Robust distributed network localization with noisy range measurements. In Proceedings of ACM Sensys-04, Nov 2004.
[4] Y. Gwon; R. Jain, T Kawahara, “Robust indoor location estimation of stationary and mobile users” In Proceedings of the IEEE Computer and Communications Societies (INFOCOM), vol. 2, pp. 1032 – 1043, March 2004
[5] Y.Shang, W.Ruml, Y.Zhang, and M.P.J.Fromherz, ”Localization from mere connectivity,” in Proceedings of the 4th acm international symposium on mobile ad hoc networking & computing (MobiHoc’03), June 2003
[6] T. He, C. Huang, B. M. Blum, J. A. Stankovic, and T. F. Abdelzaher. Range-free localization and its impact on large scale sensor networks. Trans. on Embedded Computing Sys. 4(4):877–906, 2005.
[7] K. Whitehouse, C. Karlof, A. Woo, F. Jiang, and D. Culler, The Effects of Ranging Noise on Multihop Localization: An Empirical Study, IPSN, April 2005.
0 1 2 3 4 5 6
-80 -70 -60 -50 -40 -30 -20 -10 0
distance in meters
s ig n a l s tr e n g th i n d B Original RSSI Predicted RSSI
0 1 2 3 4 5 6
-70 -60 -50 -40 -30 -20 -10 0
distance in meters
[8] P. Levis and D. Culler, Mate: A Tiny Virtual Machine for Sensor Networks, Int. Conf. on Architectural Support for Programming Languages and Operating Systems, October 2002.
[9] K. Whitehouse The design of Calamari: an ad-hoc localization system for sensor networks, Master’s Thesis, UC Berkeley, 2002. [10] Youssef C., Localization in wireless sensor networks”, Master’s Degree Project Stockholm, Sweden, IRRTEX0523 2005.
[11] A. Savvides, H. Park, M. Srivastava, The bits and flops of the N-hop multilateration primitive for node localization problems, in: First ACM International Workshop on Wireless Sensor Networks and Application (WSNA), Atlanta, GA, 2002, pp. 112–121.
[12] ”An Introduction to Indoor Radio Propagation”, Spread Spectrum Scene,2005
[13] Hill, J., System Architecture for Wireless Sensor Networks. 2000: Masters Report, University of California Berkeley. 65. Madden, S., et al., TinyDB web page. 2002:.
[14] R. Stoleru, T. He,and J. A. Stankovic. Walking GPS: A Practical Solution for Localization in Manually Deployed Wireless Sensor Networks. In Proc. LCN, pages 480–489, 2004.