Space-time discontinuous Galerkin method for the numerical simulation of
viscous compressible gas flow with the k-omega turbulence model
Jan ˇCesenek1,a
1VZLU - Czech Aerospace Research Center, Beranov´ych 130, 199 05 Praha - Letˇnany, Czech Republic
Abstract. In this article we deal with the numerical simulation of the non-stationary compressible turbulent flow described by the Reynolds-Averaged Navier-Stokes (RANS) equations. This RANS system is equipped with two-equation k-omega turbulence model. The discretization of these two systems is carried out separately by the space-time discontinuous Galerkin method. This method is based on the piecewise polynomial discontinuous approximation of the sought solution in space and in time. We use the numerical experiments to demonstrate the applicability of the shown approach. All presented results were computed with the own-developed code.
1 Introduction
During the last decade the space-time discontinuous Ga-lerkin finite element method (ST-DG), which is based on piecewise polynomial discontinuous approximations of the sought solution, became very popular in the field of numer-ical simulation of the fluid flow. This method of higher or-der was successfully used for the simulation of the Navier-Stokes equations [1–6]. In the case of compressible tur-bulent flow the finite volume - space-time discontinuous Galerkin method was used [7–9], where the equations of the turbulence model were discretized by the implicit finite volume method. This article is devoted to the discretiza-tion of viscous compressible turbulent gas flow using ST-DG applied also for the equations of the turbulence model. The flow is described by the system of the RANS equa-tions equipped with the system ofk−ωequations. These two systems are solved separately and discretized by ST-DG. In this article Wilcoxk−ωturbulence model was cho-sen [10]. The flow around airfoil RAE2822 will be used for the numerical simulations. These results are compared with experiments. Computational results show that the ST-DG method is good approach for the solution of these types of problems.
2 Formulation of the
k
−
ω
turbulence
model
We consider compressible turbulent flow in a bounded do-mainΩ⊂IR2. We assume that the boundaryΩconsists of
three disjoint parts∂Ω = ΓI ∪ΓO∪ΓW, whereΓI is the inlet,ΓOis the outlet andΓWis impermeable wall.
The system of the RANS equations describing the vis-cous compressible turbulent flow can be written in the form
∂w ∂t +
2
s=1
∂fs(w) ∂xs +
2
s=1
∂fsp(w) ∂xs
a e-mail:[email protected], [email protected]
=
2
s=1
∂ks(w) ∂xs +
2
s=1
∂Rs(w,∇w)
∂xs , (1)
where fors=1,2 we have
w=(w1, ..., w4)T =(ρ, ρv1, ρv2,E)T ∈IR4,
fs(w)=(fs,1, ...,fs,4)T
=(ρvs, ρv1vs+δ1sp, ρv2vs+δ2sp,(E+p)vs)T,
fsp(w)=(fsp,1, ...,f
p s,4)T
=(0,2
3ρkδ1s, 2 3ρkδ2s,
2 3ρkvs)T,
Rs(w,∇w)=(Rs,1, ...,Rs,4)T
=
0, τVs1, τVs2, 2
r=1
τVsrvr+
cpµL
Pr + cpµT
PrT
∂θ ∂xs
T
,
ks(w)=(ks,1, ...,ks,4)T
=
0, ...,0,
µL+σkρk
eω˜
∂k
∂xs
T ,
where
τVsr=−23(µL+µT) divuδsr+2(µL+µT)dsr(u),
dsr(u)= 1 2
∂vs ∂xr +
∂vr ∂xs
.
We use the following notation: u = (v1, v2) - velocity, ρ
- density, p- pressure,θ- absolute temperature, E- total energy,γ- Poisson adiabatic constant,κ- heat conduction coefficient,cv- specific heat at constant volume,cp- spe-cific heat at constant pressure, wherecp = γcv,Pris the
laminar Prandtl number, which can be express in the form
formula. The above system is completed by the thermody-namical relations
p=(γ−1)
E−12ρ|u|2−ρk
, θ= 1
cv
E
ρ − 1 2|u|2−k
and is equipped with the initial condition
w(x,0)=w0(x), x∈Ω and the following boundary conditions
a) ρ|ΓI =ρD,
b) u|ΓI =uD=(vD1, vD2)T,
c)
2
s,r=1
τVsrnsvr+
cpµL
Pr + cpµT
PrT
∂θ
∂n =0 onΓI,
a) u|ΓW =0,
b) ∂θ ∂n
ΓW =0,
a)
2
s=1
τVsrns=0, r=1,2 onΓO, b) ∂θ ∂n
ΓO =0,
with given dataw0, ρD,uD. It is possible to show thatfs(αw)=
αfs(w) forα >0. This property implies that
fs(w)=As(w)w, s=1,2, (2)
where
As(w)= Dfs(w)
Dw , s=1,2,
are the Jacobi matrices of the mappingsfs. Similary we can express
fsp(w)=Asp(w)w, s=1,2.
The viscous termsRs(w,∇w) can be expressed in the form
Rs(w,∇w)=
2
k=1
Ks,k(w)
∂w
∂xk, s=1,2, (3)
whereKs,k(w)∈IR4×4are matrices depending onw.
The aforesaid system of the RANS equations is com-pleted by the Wilcox’s turbulence model (see [10]) forµT. For the sake of the stability we introduce new variable
˜
ω=lnω. (For details see [11]). Then the turbulence model
reads
∂ρw˜ ∂t +
2
s=1
∂˜fs( ˜w) ∂xs =
2
s=1
∂R˜s( ˜w,∇w˜)
∂xs +s˜( ˜w), (4)
where fors=1,2 we have
˜
w=( ˜w1,w˜2)T =( ˜ω,k)T ∈IR2,
˜
fs( ˜w)=( ˜fs,1,f˜s,2)T =(ρωvs, ρ˜ kvs)T,
˜
Rs( ˜w,∇w˜)=( ˜Rs,1,R˜s,2)T =
(µL+σωµT)
∂ω˜
∂xs,(µL+σkµT) ∂k
∂xs
T ,
˜
s( ˜w)=(αωPk
k −βρeω˜ + 2
s=1
(µL+σωµT)
∂ω˜ ∂xs
∂ω˜ ∂xs +
˜
CD,
Pk−β∗ρeω˜k)T.
Here ω is the turbulence dissipation,k is the turbulence kinetic energy andµT is the eddy viscosity. We can write the production term as
Pk=
2
s=1 2
r=1
τTsr∂vs∂x r,
where
τTsr=−23µTdivuδsr−23ρkδsr+2µT dsr(u),
dsr(u)= 1
2
∂vs ∂xr +
∂vr ∂xs
,
µT = ρk
ωlim.
Limited eddy viscosityωlimis given by the term
ωlim =max
eω˜,Clim
1 2β∗
2
r,s=1
˜ τrsτrs˜
, ˜
τrs =−2
3divuδrs+2drs(u).
The cross-diffusion termCDis defined as
CD=σDeρω˜max
2
s=1
∂k ∂xs
∂ω˜ ∂xs,0
.
The coefficientsβ, β∗, σk, σω, σD, αω,Clim,PrT are chosen by [10]:
αω= 13
25, β=0.0708, β∗=0.09, σk=0.6, σω=0.5,
Clim= 7
8, σD= 1
8, PrT = 8 9.
This system is also equipped with the initial condition
˜
w(x,0)=w˜0(x), x∈Ω and the following boundary conditions
a) ˜ω|ΓI =ωD,˜ b)k|ΓI =kD,
a) ˜ω|ΓW =ω˜wall, b)k|ΓW =0,
a) ∂ω˜ ∂n
ΓO =0, b)
∂k
∂n
ΓO =0,
with given data ˜w0,ωD,˜ kD,ω˜
wall. Similary like in the RANS
case we can express convect terms
˜
fsp(w)=A˜sp( ˜w) ˜w, s=1,2 (5)
and diffusion terms
˜
Rs( ˜w,∇w˜)=K˜s( ˜w)∂w˜
∂xs, s=1,2, (6)
formula. The above system is completed by the thermody-namical relations
p=(γ−1)
E−12ρ|u|2−ρk
, θ= 1
cv
E
ρ − 1 2|u|2−k
and is equipped with the initial condition
w(x,0)=w0(x), x∈Ω and the following boundary conditions
a) ρ|ΓI =ρD,
b) u|ΓI =uD=(vD1, vD2)T,
c)
2
s,r=1
τVsrnsvr+
cpµL Pr + cpµT PrT ∂θ
∂n =0 onΓI,
a) u|ΓW =0,
b) ∂θ ∂n
ΓW =0,
a)
2
s=1
τVsrns=0, r=1,2 onΓO, b) ∂θ ∂n
ΓO =0,
with given dataw0, ρD,uD. It is possible to show thatfs(αw)=
αfs(w) forα >0. This property implies that
fs(w)=As(w)w, s=1,2, (2)
where
As(w)= Dfs(w)
Dw , s=1,2,
are the Jacobi matrices of the mappingsfs. Similary we can express
fsp(w)=Asp(w)w, s=1,2.
The viscous termsRs(w,∇w) can be expressed in the form
Rs(w,∇w)=
2
k=1
Ks,k(w)
∂w
∂xk, s=1,2, (3)
whereKs,k(w)∈IR4×4are matrices depending onw.
The aforesaid system of the RANS equations is com-pleted by the Wilcox’s turbulence model (see [10]) forµT. For the sake of the stability we introduce new variable
˜
ω=lnω. (For details see [11]). Then the turbulence model
reads
∂ρw˜ ∂t +
2
s=1
∂f˜s( ˜w) ∂xs =
2
s=1
∂R˜s( ˜w,∇w˜)
∂xs +s˜( ˜w), (4)
where fors=1,2 we have
˜
w=( ˜w1,w˜2)T =( ˜ω,k)T ∈IR2,
˜
fs( ˜w)=( ˜fs,1,f˜s,2)T =(ρωvs, ρ˜ kvs)T,
˜
Rs( ˜w,∇w˜)=( ˜Rs,1,R˜s,2)T =
(µL+σωµT)
∂ω˜
∂xs,(µL+σkµT) ∂k
∂xs
T ,
˜
s( ˜w)=(αωPk
k −βρeω˜ + 2
s=1
(µL+σωµT)
∂ω˜ ∂xs
∂ω˜ ∂xs +
˜
CD,
Pk−β∗ρeω˜k)T.
Here ω is the turbulence dissipation, kis the turbulence kinetic energy andµT is the eddy viscosity. We can write the production term as
Pk=
2
s=1 2
r=1
τTsr∂∂vsx r,
where
τTsr=−23µTdivuδsr−23ρkδsr+2µT dsr(u),
dsr(u)= 1
2
∂vs ∂xr +
∂vr ∂xs
,
µT = ρk
ωlim.
Limited eddy viscosityωlimis given by the term
ωlim =max
eω˜,Clim
1 2β∗ 2
r,s=1
˜ τrsτrs˜
, ˜
τrs=−2
3divuδrs+2drs(u).
The cross-diffusion termCDis defined as
CD=σDeρω˜max
2 s=1 ∂k ∂xs
∂ω˜ ∂xs,0
.
The coefficientsβ, β∗, σk, σω, σD, αω,Clim,PrT are chosen by [10]:
αω= 13
25, β=0.0708, β∗=0.09, σk=0.6, σω=0.5,
Clim= 7
8, σD= 1
8, PrT = 8 9.
This system is also equipped with the initial condition
˜
w(x,0)=w˜0(x), x∈Ω and the following boundary conditions
a) ˜ω|ΓI =ωD,˜ b)k|ΓI =kD,
a) ˜ω|ΓW =ω˜wall, b)k|ΓW =0,
a) ∂ω˜ ∂n
ΓO =0, b)
∂k
∂n
ΓO =0,
with given data ˜w0,ωD,˜ kD,ω˜
wall. Similary like in the RANS
case we can express convect terms
˜
fsp(w)=A˜sp( ˜w) ˜w, s=1,2 (5)
and diffusion terms
˜
Rs( ˜w,∇w˜)=K˜s( ˜w)∂w˜
∂xs, s=1,2, (6)
where ˜Ks(w)∈IR2×2are matrices depending on ˜w.
3 Discretization
3.1 Space discretization of the problem
ByΩh we denote polygonal approximation of the domain Ω. LetThbe a partition of the domainΩhinto finite num-ber of closed elements with mutually disjoint interiors such that Ωh = K∈ThK. In 2D problems, we usually choose K∈ Thas triangles or quadrilaterals. ByFhwe denote the system of all faces of all elementsK∈ Th. Further, we in-troduce the set of boundary facesFB
h ={Γ∈ Fh;Γ⊂∂Ωh} and the set of inner faces FI
h =Fh\FhB. EachΓ∈ Fh is associated with a unit normal vectornΓ. ForΓ∈ FhBthe
normalnΓhas the same orientation as the outer normal to
∂Ωh. For eachΓ ∈ FI
h there exist two neighbouring ele-mentsKL
Γ,KΓR ∈ Thsuch thatΓ⊂∂KΓL∩∂KRΓ. We use the
convention thatKR
Γ lies in the direction ofnΓ andKΓLlies
in the opposite direction tonΓ. IfΓ∈ FhB, then the element
adjacent toΓwill be denoted byKΓL.
We shall look for an approximate solution of the prob-lem in the space of piecewise polynomial functions
Shp=(Shp)4, Shp={v;v|K ∈Pp(K),∀K∈ Th}, wherep>0 is an integer andPp(K) denotes the space of all polynomials onKof degree≤p. A functionΦ∈Shpis, in general, discontinuous on interfacesΓ∈ FhI. ByΦLΓand ΦRΓ we denote the values ofΦonΓ considered from the interior and the exterior ofKL
Γ, respectively, and set
ΦΓ = 1
2
ΦLΓ+ ΦRΓ, [Φ]Γ =ΦΓL− ΦRΓ,
which denotes the average and jump ofΦonΓ.
The discrete problem is derived in the following way: For arbitraryt ∈ [0,T] we can multiply the system by a test functionShp, integrate overK∈ Th, apply Green’s the-orem, sum over all elementsK ∈ Th, use the concept of the numerical flux and introduce suitable terms mutually vanishing for a regular exact solution. Moreover, we carry out a suitable partial linearization of nonlinear terms and then we can define the following forms.
In order to evaluate the integrals overΓ ∈ Fhin invis-cid term we use the approximation
H(wL
Γ,wRΓ,nΓ)≈ 2
s=1
fs(w)(nΓ)s,
whereHis a numerical flux. For the construction of the numerical flux we use the properties (2) offs. Let us define the matrix
P(w,n) :=
2
s=1
As(w)ns,
wheren=(n1,n2), n21+n22=1. Then we have
P(w,n)w:=
2
s=1
fs(w)ns.
It is possible to show that the matrixPis diagonalizable. It means that there exists a nonsingular matrixT=T(w,n) and a diagonal matrixΛ=Λ(w,n) such that
P=TΛT−1, Λ=diag(λ1, ..., λ4),
whereλi=λi(w,n) are eigenvalues of the matrixP. Then we can define the ”positive” and ”negative” parts of the matrixPby
P±=TΛ±T−1, Λ±=diag(λ± 1, ..., λ±4),
whereλ+=max(λ,0),λ−=min(λ,0). Using this concept,
we introduce the so-called Vijayasundaram numerical flux
H(wL,wR,n)=P+
wL
+wR
2 ,n
wL+P−
wL
+wR
2 ,n
wR.
This numerical flux has suitable form for a linearization. Now we can define inviscid form in the following way
bh( ¯wh,wh, Φh) :=
−
K∈Th
K
2
s=1
As( ¯wh)wh·∂Φh ∂xs dx
+
Γ∈FI h
Γ
P+(w¯
h,nΓ)wLh+P−(w¯h,nΓ)wRh
·[Φh] dS
+
Γ∈FB h
Γ
P+(
w¯h,nΓ)wLh+P−(w¯h,nΓ) ¯wRh
·ΦhdS,
where the boundary state ¯wR
h is evaluated with the aid of the local linearized Riemann problem described in [1]. For the discretization of the viscous terms we use the property (3) and get the viscous form
ah( ¯wh,wh, Φh) :=
+
K∈Th
K 2 s=1 2
k=1
Ks,k( ¯wh) ∂wh
∂xk · ∂Φh
∂xs dx
− Γ∈FI h
Γ 2
s=1
2
k=1
Ks,k( ¯wh)∂wh
∂xk
(nΓ)s·[Φh] dS
− Γ∈FB
h Γ 2 s=1 2 k=1
Ks,k( ¯wh)
∂wh
∂xk (nΓ)s·ΦhdS
−Θ
Γ∈FI h
Γ 2
s=1
2
k=1
KT k,s( ¯wh)
∂Φh ∂xk
(nΓ)s·[wh] dS
−Θ
Γ∈FB h
Γ 2
s=1 2
k=1
KT k,s( ¯wh)
∂Φh
∂xk (nΓ)s·whdS We setΘ= 1 orΘ =0 orΘ= −1 and get the so-called
symmetric version (SIPG) or incomplete version (IIPG) or nonsymetric version (NIPG), respectively, of the dis-cretization of the viscous terms.
Further, we define the turbulent formsph,kh, the inte-rior and boundary penalty formJσ
h and the right-hand side formlhin the following way:
ph( ¯wh,wh, Φh) :=
Γ∈FI h
Γ 2
s=1
− Γ∈FI h
Γ 2
s=1
Aps( ¯wRh)whR·ΦRh (nΓ)sdS
+
Γ∈FB h
Γ 2
s=1
Ap
s( ¯wh)wh·Φh(nΓ)sdS
−
K∈Th
K
2
s=1
Aps( ¯wh)wh·∂Φh ∂xs dx,
kh( ¯wh, Φh) :=
Γ∈FI h
Γ 2
s=1
ks( ¯wL
h)·ΦhL(nΓ)sdS
− Γ∈FI h
Γ 2
s=1
ks( ¯wR
h)·ΦRh(nΓ)sdS
+
Γ∈FB h
Γ 2
s=1
ks( ¯wh)·Φh(nΓ)sdS
−
K∈Th
K
2
s=1
ks( ¯wh)·∂Φh∂x
s dx,
Jσ
h(wh, Φh) :=
Γ∈FI h
Γ
σ[wh]·[Φh] dS
+
Γ∈FB h
Γ
σwh·ΦhdS,
lh( ¯wh, Φh) :=
Γ∈FB h
Γ
σwB·ΦhdS
−Θ
Γ∈FB h
Γ 2
s=1 2
k=1
KT k,s( ¯wh)
∂Φh
∂xk(nΓ)s·wBdS, whereσis a parameter of the method and boundary state
wBis defined on the basis of the Dirichlet boundary condi-tions and extrapolation.
In the vicinity of discontinuities or steep gradients non-physical oscillations can appear in the approximate solu-tion. In order to overcome this difficulty we employ
artifi-cial viscosity forms, see [3]. They are based on the discon-tinuity indicator
g(K) := 1
d(K)|K|3/4
∂K[¯ρh]
2dS, K∈ Th,
where [¯ρh] is the jump of the function ¯ρh(=the first
com-ponent of the vector function ¯wh) on the boundary ∂K,
d(K) denotes the diameter ofK and|K| denotes the area of the elementK. Then we define the discrete discontinu-ity indicator
G(K) :=0 ifg(K)<1,
G(K) :=1 ifg(K)≥1, K∈ Th, and the artificial viscosity forms
˜
βh( ¯wh,wh, Φh) :=
ν1
K∈Th
d(K)G(K)
K∇wh· ∇Φhdx,
˜
Jh( ¯wh,wh, Φh) :=
ν2
Γ∈FI h
1 2
G(KL
Γ)+G(KΓR) Γ
[wh]·[Φh] dS,
with constantsν1andν2.
All these forms are linear with respect towhand non-linear with respect to ¯wh.
Finally, we set
(ϕ, ψ)=
Ωh
ϕ ψdx.
3.2 Full space-time DG discretization
Let 0=t0<t1< ... <tM=T be a partition of the interval [0,T] and let us denoteIm=(tm−1,tm),τm=tm−tm−1for m=1, ...,M. We define the spaceShp,τ,q=(Shp,τ,q)4, where
Sp,q h,τ :=
φ;φ|Im =
q
i=0
ζiφi, whereφi∈Shp, ζi∈Pq(Im)
.
with integersp,q≥1.Pq(Im) denotes the space of all poly-nomials intonImof degree≤ q. Moreover forΦ ∈ Shp,τ,q
we introduce the following notation:
Φ±m=Φ(t±m)=tlim→t
m±Φ(t),
{Φ}m=Φ+m− Φ−m.
Approximate solution whτ of the problem will be sought
in the spaceSp,q
h,τ. Since the functions of this space are in
general discontinuous in time, we ensure the connection betweenIm−1andImby the penalty term in time
{whτ}m−1, Φhτ(t+m−1)
.
The initial statewhτis included by theL2(Ωh(t0))-projection
ofw0onSp h(t0):
whτ(t0+), Φhτ(t+0)
=w0, Φhτ(t+0)
∀Φhτ∈Shp,τ,q.
Now we introduce a suitable linearization. We can use two possibilities.
1) We put ¯whτ(t) :=wh(t−m−1) fort∈Im.
2) We prolong the solution from the time intervalIm−1
to the time intervalIm.
We say that a functionwhτ ∈ Shp,τ,q is the approximate
solution of the problem (1) obtained by the ST-DG method, if it satisfies the following conditions
M
m=1
Im
∂whτ
∂t , Φhτ
dt
+
M
m=1
Im
(ah( ¯whτ,whτ, Φhτ)+bh( ¯whτ,whτ, Φhτ)) dt
+
M
m=1
Im
˜
βh( ¯whτ,whτ, Φhτ)+J˜h( ¯whτ,whτ, Φhτ)
dt
+
M
m=1
Im
(Jσ
− Γ∈FI h Γ 2 s=1
Aps( ¯wRh)whR·ΦRh (nΓ)sdS
+
Γ∈FB h Γ 2 s=1 Ap
s( ¯wh)wh·Φh(nΓ)sdS
−
K∈Th
K
2
s=1
Asp( ¯wh)wh·∂Φh ∂xs dx,
kh( ¯wh, Φh) :=
Γ∈FI h
Γ 2
s=1
ks( ¯wL
h)·ΦhL(nΓ)sdS
− Γ∈FI h Γ 2 s=1
ks( ¯wR
h)·ΦRh (nΓ)sdS
+
Γ∈FB h
Γ 2
s=1
ks( ¯wh)·Φh(nΓ)sdS
−
K∈Th
K
2
s=1
ks( ¯wh)·∂Φh∂x
s dx,
Jσ
h(wh, Φh) :=
Γ∈FI h
Γ
σ[wh]·[Φh] dS
+
Γ∈FB h
Γ
σwh·ΦhdS,
lh( ¯wh, Φh) :=
Γ∈FB h
Γ
σwB·ΦhdS
−Θ
Γ∈FB h Γ 2 s=1 2 k=1 KT k,s( ¯wh)
∂Φh
∂xk(nΓ)s·wBdS, whereσis a parameter of the method and boundary state
wBis defined on the basis of the Dirichlet boundary condi-tions and extrapolation.
In the vicinity of discontinuities or steep gradients non-physical oscillations can appear in the approximate solu-tion. In order to overcome this difficulty we employ
artifi-cial viscosity forms, see [3]. They are based on the discon-tinuity indicator
g(K) := 1
d(K)|K|3/4
∂K[¯ρh]
2dS, K∈ Th,
where [¯ρh] is the jump of the function ¯ρh(=the first
com-ponent of the vector function ¯wh) on the boundary ∂K,
d(K) denotes the diameter of Kand|K| denotes the area of the elementK. Then we define the discrete discontinu-ity indicator
G(K) :=0 ifg(K)<1,
G(K) :=1 ifg(K)≥1, K∈ Th, and the artificial viscosity forms
˜
βh( ¯wh,wh, Φh) :=
ν1
K∈Th
d(K)G(K)
K∇wh· ∇Φhdx,
˜
Jh( ¯wh,wh, Φh) :=
ν2
Γ∈FI h
1 2
G(KL
Γ)+G(KΓR) Γ
[wh]·[Φh] dS,
with constantsν1andν2.
All these forms are linear with respect towhand non-linear with respect to ¯wh.
Finally, we set
(ϕ, ψ)=
Ωh
ϕ ψdx.
3.2 Full space-time DG discretization
Let 0=t0<t1< ... <tM=T be a partition of the interval [0,T] and let us denoteIm=(tm−1,tm),τm=tm−tm−1for m=1, ...,M. We define the spaceShp,τ,q=(Shp,τ,q)4, where
Sp,q h,τ :=
φ;φ|Im =
q
i=0
ζiφi, whereφi∈Shp, ζi∈Pq(Im)
.
with integersp,q≥1.Pq(Im) denotes the space of all poly-nomials intonImof degree≤ q. Moreover forΦ ∈ Shp,τ,q
we introduce the following notation:
Φ±m=Φ(t±m)=tlim→t
m±Φ(t),
{Φ}m=Φ+m− Φ−m.
Approximate solution whτ of the problem will be sought
in the spaceSp,q
h,τ. Since the functions of this space are in
general discontinuous in time, we ensure the connection betweenIm−1andImby the penalty term in time
{whτ}m−1, Φhτ(t+m−1)
.
The initial statewhτis included by theL2(Ωh(t0))-projection
ofw0onSp h(t0):
whτ(t0+), Φhτ(t+0)
=w0, Φhτ(t0+)
∀Φhτ∈Shp,,τq.
Now we introduce a suitable linearization. We can use two possibilities.
1) We put ¯whτ(t) :=wh(t−m−1) fort∈Im.
2) We prolong the solution from the time intervalIm−1
to the time intervalIm.
We say that a functionwhτ ∈ Shp,,τq is the approximate
solution of the problem (1) obtained by the ST-DG method, if it satisfies the following conditions
M m=1 Im
∂whτ
∂t , Φhτ
dt + M m=1 Im
(ah( ¯whτ,whτ, Φhτ)+bh( ¯whτ,whτ, Φhτ)) dt
+
M
m=1
Im
˜
βh( ¯whτ,whτ, Φhτ)+J˜h( ¯whτ,whτ, Φhτ)
dt
+
M
m=1
Im
(Jσ
h(whτ, Φhτ)+ph( ¯whτ,whτ, Φhτ)) dt
+
M
m=2
{whτ}m−1, Φhτ(t+m−1)
+ whτ(t+0), Φhτ(t0+)
= M m=1 Im
lh( ¯whτ, Φhτ) dt+
w0, Φh τ(t0+)
+
M
m=1
Im
kh( ¯whτ, Φhτ) dt ∀Φhτ∈Shp,τ,q.
4 Discretization of the
k
−
ω
turbulence
model
4.1 Space discretization of the problem
We apply discontinuous Galerkin method in the similar way as in the previous section. Discretization is carried out on the same mesh for simplicity. An approximate solution of the problem is looked for in the space ˜Sph˜ =(Shp˜)2and a
function ˜Φ∈S˜ph˜is, in general, discontinuous on interfaces Γ∈ FhI.
If we define ˜P± =(ρv ·nΓ)±I, whereI=diag(1,1),
and use the property (5) then we can define convect form ˜
bh( ¯˜wh,w˜h,Φh) :˜ =
−
K∈Th
K 2 s=1 ˜
Asw˜h·∂ ˜ Φh ∂xs dx
+
Γ∈FI h
Γ
˜
P+w˜L
h+P˜−w˜Rh
·[ ˜Φh] dS
+
Γ∈FB h
Γ
˜
P+w˜L
h+P˜−w¯˜Rh
·Φh˜ dS,
where the state ¯˜wRh is based on the boundary conditions. For the discretization of the diffusion term we use the
property (6) and then we have ˜
ah( ¯˜wh,w˜h,Φh) :˜ =
+
K∈Th
K
2
s=1
˜
Ks( ¯˜wh)∂w˜h ∂xs ·
∂Φh˜ ∂xs dx
− Γ∈FI h
Γ 2
s=1
˜
Ks( ¯˜wh)∂w˜h ∂xs
(nΓ)s·[ ˜Φh] dS
− Γ∈FB
h Γ 2 s=1 ˜
Ks( ¯˜wh)∂w˜h ∂xs(nΓ)s·
˜ ΦhdS
−Θ
Γ∈FI h Γ 2 s=1 ˜
Ks( ¯˜wh)∂Φh˜ ∂xs
(nΓ)s·[ ˜wh] dS
−Θ
Γ∈FB h
Γ 2
s=1
˜
Ks( ¯˜wh)∂Φh˜
∂xs(nΓ)s·w˜hdS.
Further we define the turbulent form ˜sh, the interior and boundary penalty form ˜Jσ˜
h and the right-hand side form ˜lh in the following way:
˜
Jσ˜
h( ˜wh,Φh) :˜ =
Γ∈FI h
Γ
˜
σ[ ˜wh]·[ ˜Φh] dS
+
Γ∈FB h
Γ
˜
σw˜h·Φh˜ dS,
˜
lh( ¯˜wh,Φh) :˜ =
Γ∈FB h
Γ
˜
σw˜B·Φh˜ dS
−Θ
Γ∈FB h
Γ 2
s=1
˜
Ks( ¯˜wh)∂Φh˜
∂xs(nΓ)s·w˜BdS.
˜
sh( ¯˜wh,Φh) :˜ =
K∈Th
Ks˜( ¯˜wh) · ˜ Φhdx
Boundary state ˜wB is defined on the basis of the Dirichlet boundary conditions and extrapolation.
4.2 Full space-time DG discretization
For the full space-time discontinuous Galerkin discretiza-tion we use the same partidiscretiza-tion of the interval [0,T] as in the previous section. We say that a function ˜whτ ∈S˜hp˜,˜,τq is
the approximate solution of the problem (4) obtained by the ST-DG method, if it satisfies the following conditions
M−1
m=0
Im
∂ρw˜hτ
∂t ,Φh˜ τ
dt
+
M−1
m=0 Im ˜
ah( ¯˜whτ,w˜hτ,Φh˜ τ)+b˜h( ¯˜whτ,w˜hτ,Φh˜ τ)
dt
+
M−1
m=0
Im
˜
Jσ˜
h( ˜whτ,Φh˜ τ) dt
+
M−1
m=1
{w˜hτ}m,Φh˜ τ(t+m)
+ w˜hτ(t0+),Φh˜ τ(t+0)
=
M−1
m=0
Im
(˜lh( ¯˜whτ,Φh˜ τ)+s˜h( ¯˜whτ,Φh˜ τ)) dt
+w˜0,Φh˜ τ(t+0)
∀Φh˜ τ∈S˜hp˜,τ,˜q.
5 Numerical experiments
In order to demonstrate the applicability of the developed method we shall present two numerical simulations of com-pressible turbulent flow in 2D. For this purpose we chose two regimes for the profile RAE2822 and compared it with experimental data, which can be found in [12]. First regime is characterized by the far-field Mach number M∞ = 0.6
and the angle of the attackα=2.57o(’case 3’ in [12]) and
second case is characterized by the Mach numberM∞ =
0.73 and the angle of the attack α = 3.19o (’case 9’ in
[12]). For both cases we set free-stream turbulence inten-sityTu =1%. Figures 1-3 and 5-7 show the pressure
Fig. 1.The distribution of the pressure for the case 3.
Fig. 2.The distribution of the Mach number for the case 3.
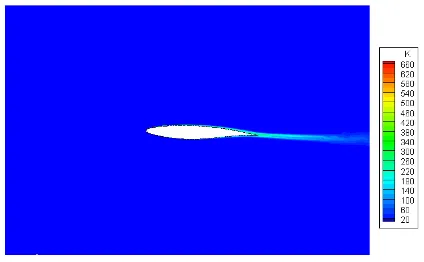
Fig. 3.The distribution of the turbulent kinetic energy for the case 3.
6 Conclusion
In this paper we dealt with the space-time discontinuous Galerkin method for the numerical solution of the viscous compressible turbulent flow. The applicability of the pro-posed method was demonstrated on the examples which show that the presented method is an efficient numerical
scheme for the solution of the viscous compressible turbu-lent flow.
Fig. 4.Comparison of the computed pressure coefficientcpwith
the experimental data for the case 3.
Fig. 5.The distribution of the pressure for the case 9.
Fig. 6.The distribution of the Mach number for the case 9.
Acknowledgment
Fig. 1.The distribution of the pressure for the case 3.
Fig. 2.The distribution of the Mach number for the case 3.
Fig. 3.The distribution of the turbulent kinetic energy for the case 3.
6 Conclusion
In this paper we dealt with the space-time discontinuous Galerkin method for the numerical solution of the viscous compressible turbulent flow. The applicability of the pro-posed method was demonstrated on the examples which show that the presented method is an efficient numerical
scheme for the solution of the viscous compressible turbu-lent flow.
Fig. 4.Comparison of the computed pressure coefficientcpwith
the experimental data for the case 3.
Fig. 5.The distribution of the pressure for the case 9.
Fig. 6.The distribution of the Mach number for the case 9.
Acknowledgment
This result originated with the support of Ministry of In-dustry and Trade of the Czech Republic for the long-term strategic development of the research organization. The au-thor acknowledge this support.
Fig. 7.The distribution of the turbulent kinetic energy for the case 9.
Fig. 8.Comparison of the computed pressure coefficientcpwith
the experimental data for the case 9.
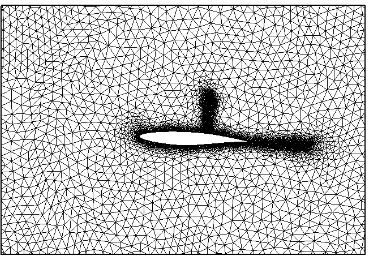
Fig. 9.Detail of the mesh.
References
1. M. Feistauer, J. Felcman, and I. Straˇskraba
Mathematical and Computational Methods for Com-pressible Flow, Clarendon Press, Oxford (2003)
2. J. ˇCesenek,Discontinuous Galerkin method for solving compressible viscous flow, Doctoral Thesis, (2011) 3. V. Dolejˇs´ı, M. Feistauer, Discontinuous Galerkin
Method, Springer (2015)
4. J. ˇCesenek, et al., Appl. Math. Comput., doi:10.1016/1.amc.2011.08.077 (2011)
5. J. ˇCesenek, M. Feistauer, A. Kosik,ZAMM−Z. Angew. Math. Mech.93, 6−7, 387−402 (2013)
6. J. ˇCesenek,EPJ WoC67, 02015 (2014)
7. J. ˇCesenek, Combined finite volume - space-time dis-continuous Galerkin method for the 2D compressible tur-bulent flow. Technical report R-6154, VZL ´U (2014) 8. J. ˇCesenek,EPJ WoC114, 02012 (2016)
9. J. ˇCesenek,EPJ WoC143, 02014 (2017) 10. D.C. Wilcox,AIAA Journal46,11, (2008)
11. Bassi, et al., Computers and Fluids 34, 507-540 (2005)
12. P.H. Cook, M.A. McDonald and M.C.P. Firmin,