International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, ISO 9001:2008 Certified Journal, Volume 6, Issue 2, February 2016)
1
Numerical Solution of Non-linear Elasticity Problems Using
Higher-Order Taylor Series Approximations
Huang, Li-Jeng
Associate Professor, Department of Civil Engineering, National Kaohsiung University of Applied Science, 80778, Taiwan, Republic of China
Abstract—An innovative numerical solution of non-linear elasticity problem using higher-order Taylor series approximations is derived and verified. A numerical example of displacement-loading analysis of nonlinear spring of softening material is employed and solved for comparison study of the present scheme with classical ones including Euler method, 2nd-order Runge-Kutta method, full- and modified Newton-Raphson method with the exact solution. Convergence and error percentage of these schemes are compared. Results show that the scheme using higher-order Taylor series expansion, exact or finite difference approximations of higher-order derivatives, provides convergent and precise approximate solutions even using 2 to 4 terms under equal or unequal load increments.
Keywords— Elasto-plasticity, Finite Element Methods, Higher-order Approximation, Non-linear Elasticity, Numerical Solutions, Taylor Series Expansion.
I. INTRODUCTION
In structural and solid mechanics, types of nonlinearity arises from many causes and can be grouped into three categories: (1) material nonlinearity: in which material properties are functions of the state (deformation and stress), such as in nonlinear elasticity, plasticity and creep; (2) geometric nonlinearity: in which deformation is large and the equilibrium equations can not be referred to undeformed structural geometry; (3) contact nonlinearity [1-6]. In this paper only the material nonlinearity is considered.
When equilibrium equations are nonlinear due to material nonlinearity the principle of superposition does not apply. For time-independent material nonlinear problems two basic approaches to solve the system equations are: (1) direct iterative solution of the nonlinear equations, such as Euler’s method, Runge-Kutta methods, etc. (2) incremental methods in which iterative processes are conducted based on linearized system with small incremental strains and stresses, and during each step the material is considered to be linear and elastic and fore unbalance is eliminated by sub-iterative schemes, such as Newton-Raphson and modified Newton-Raphson schemes.
In the finite element methods and famous analysis softwares, such as ANSYS, SAP, etc., incremental schemes are usually employed for nonlinear elasticity and elasto-plasticity analysis [7-11]. It is reported that incremental schemes are valid for strain-softening problems and another special schemes, such as line-search methods and their modifications, can be employed for strain-hardening problems [12-15].
However, full Newton-Raphson method requires calculation of tangential stiffness matrix (which need to be updated at new state of deformation and stress) within each sub-iterative balance process and usually are
time-consuming especially for large discrete systems.
Furthermore, when using modified Newton-Raphson method only single calculation of tangential stiffness matrix at each load step is required and kept constant during all the sub-iterative force balance process, but in general a lot of sub-iterations are required. Both methods employed in incremental approaches require well-posed convergence criteria, such as force increment and displacement increment criteria [16-25].
On the other hand, direct iterative solutions of the original nonlinear systems seem to be good starting thought. Even Euler’s method usually gives too stiffen results due to neglecting all the higher-order terms and only the first-order term is retained. Second-first-order (or higher-first-order) Runge-Kutta methods can improve the results but the calculations are more complicated.
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, ISO 9001:2008 Certified Journal, Volume 6, Issue 2, February 2016)
2
The more terms retained in the approximated expansions the better results obtained and the calculation time is less than those required in the full Newton-Raphson and modified Newton-Raphson methods. Furthermore, when exact higher-order derivatives can not be derived, the counterparts obtained from finite difference approximations can be employed.
A nonlinear elasticity problem of nonlinear spring of strain-softening type where exact solution exists is employed for numerical example for comparison study of present method based on higher-order Taylor series with those classical schemes including Euler’s method, 2nd-order Runge-Kutta method, full Newton-Raphson method, and modified Newton-Raphson method. For convergence study higher-order terms employed are up to 4 and the schemes are termed TS1, TS2, TS3 and TS4. It is shown that TS1 is the same as classical Euler’s method and solutions convergent rapidly (even TS2 can give very good approximations). Load-displacement relationship and error variation of all the numerical results are plotted for comparison. Both equal load increment and unequal load increment are considered and studied and the present scheme provides very accurate solutions with error within 3% for the current testing example.
II. CLASSICAL APPROXIMATE SOLUTIONS
Considering a typical non-linear elasticity problem of a non-linear spring where the stiffness K(u) is not a constant.
At some intermediate load P with corresponding
displacement u, the equilibrium equation can be expressed
as
u u K
P ( ) (1)
This is of course a non-linear relationship between load and displacement and we are interested in finding the approximate solutions of displacement u (and the strain and stress accordingly if required) in Eq. (1) by increasing the load P.
Some classical numerical schemes employed for solution of Eq. (1) are summarized in the following for comparison study later.
A. Euler’s Method (Point-Slope Method)
From Eq. (1) we can deduce that [2]
) , ( ) ( ) (
1 /
1
u P f u K u u K du dP dP
du
(2)
This is a first-order non-linear ordinary differential equation describing the load-deflection behaviour of the non-linear spring. Approximating the derivative du/dP by first-order difference we obtain the Euler’s scheme (point-slope scheme):
N i
P dP du u
ui1 i( )ii, 1,2,, (3)
Whereui1u(PiPi), uiu(Pi), (du/dP)i f(Pi,ui)
.
The error is E(P)O[(Pi)2].
The scheme is very easy for implementation and programming. Only the inversion of non-linear stiffness,
i
dP
du/ )
( need be calculated at any step. However, this
[image:2.612.328.560.324.481.2]method usually gives stiffened solutions.
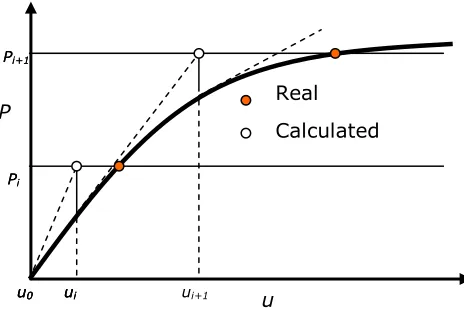
Figure 1 Schematic diagram of Euler’s method for nonlinear elasticity problem.
B. Second-Order Runge-Kutta Method
The 2nd-order Runge-Kutta method can be expressed as [2]
i i i i
i dP
dP du dP du u
u [( ) ( ) ]
2
1 *
1
1
(4)
Where
) , ( )
( *i1f Pi1ui*1 dP
du
i i i
i u f P u P
u*1 1 ( , )
u ui+1
P Real Points
Calculated Points
u0 ui Pi Pi+1
Pi Pi+1
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, ISO 9001:2008 Certified Journal, Volume 6, Issue 2, February 2016)
[image:3.612.52.292.110.291.2] [image:3.612.326.561.122.301.2]3
Figure 2 Schematic diagram of 2nd-order Runge-Kutta method for
nonlinear elasticity problem.
C. Full Newton-Raphson Method
Full Newton-Raphson Method is usually employed in incremental methods of non-linear elasticity and elasto-plasticity problems. It can be expressed as [6]
N i
P u u
Kt( i) i i, 1,2,, (5)
Where Kt(ui) is the tangential stiffness at each step. In order to eliminating the unbalanced force an iterative process is necessary to obtain a convergent solution expressed as
M m
F P u u
Kt( m) m i1 m, 1,2,, (6)
Where Fmdenotes the unbalance force in the system at predicted displacementum (We can set u0ui for each
iteration process). Iteration can be stopped by displacement increment criterion um D u0 and/or force increment
criterion. Rm R R0 , where Dand R are prescribed
small numbers. Tangential stiffness is calculated and updated at each iteration and is usually time-consuming for large system.
Figure 3 Schematic diagram of full Newton-Raphson scheme for incremental methods for nonlinear elasticity problem.
D. Modified Newton-Raphson Method
In order to eliminate the requirement of updating stiffness in Eq. (5) and (6), a modified Newton-Raphson method is proposed that constant stiffness calculated at each load step is kept constant in the iteration process and Eq. (6) becomes [6]
M m
F P u
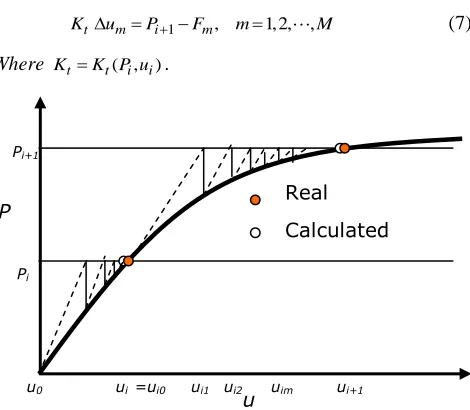
Kt m i1 m, 1,2,, (7)
[image:3.612.328.563.403.608.2]Where KtKt(Pi,ui).
Figure 4 Schematic diagram of modified Newton-Raphson scheme for incremental methods for nonlinear elasticity problem.
P
u Real Points Calculated Points
u i
u*i+ 1
ui+ 1 Pi+
1
P i
P
u
Real Points Calculated Points
Pi Pi+1
ui+1 u0 ui =ui0 ui1 uim
u
P Real Points
Calculated Points
Pi Pi+1
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, ISO 9001:2008 Certified Journal, Volume 6, Issue 2, February 2016)
4
III. NUMERICAL METHOD USING HIGHER-ORDER TAYLOR
SERIES EXPANSIONS
3.1 Using Exact Derivatives:
From the Taylor series expansion of ui1(Pi P):
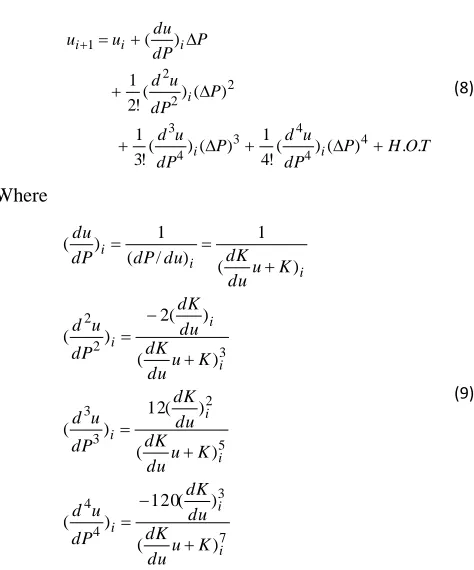
T O H P dP u d P dP u d P dP u d P dP du u u i i i i i i . . ) ( ) ( ! 4 1 ) ( ) ( ! 3 1 ) ( ) ( ! 2 1 ) ( 4 4 4 3 4 3 2 2 2 1 (8) Where 7 3 4 4 5 2 3 3 3 2 2 ) ( ) ( 120 ) ( ) ( ) ( 12 ) ( ) ( ) ( 2 ) ( ) ( 1 ) / ( 1 ) ( i i i i i i i i i i i i K u du dK du dK dP u d K u du dK du dK dP u d K u du dK du dK dP u d K u du dK du dP dP du (9)
From this we can observed that arbitrary higher-order approximate solution can be obtained if the function
) (P u
u is a continuous differentiable function. The series
converges very fast and the error can be estimated to be
] ) [( )
(P O Pi n1
E . In practical implementation the
summation process can be stopped by displacement increment criterion ui D u1
.
As compared with Eq. [image:4.612.51.288.191.476.2](3), it can be find that the Euler’s method is a special case of Eq. (8) including only the first-derivative term. As compared with full Newton-Raphson scheme, Eq. (6), it can be seen that in this scheme only higher-order derivatives at each step need be calculated to obtained a convergent solution.
Figure 5 Schematic diagram of direct iterative method using higher-order Taylor series approximations for nonlinear elasticity problem.
3.2 Using Finite Difference of Higher-Order Derivatives:
In some cases such as in numerical models of non-linear elasticity problems we cannot obtain higher-order of derivatives in Eq. (8) and (9). We can employ the following finite difference approximate expressions:
i i i i i i i i i i i i i i i i i i P dP u d dP u d dP u d dP d dP u d P dP u d dP u d dP u d dP d dP u d P dP du dP du dP du dP d dP u d K u du dK du dP dP du 1 3 3 3 3 3 3 4 4 1 2 2 2 2 2 2 3 3 1 2 2 ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( 1 ) / ( 1 ) ( (10)
IV. NUMERICAL EXAMPLE
The problem of non-linear spring proposed by Martin and Carey (1973) [2] is employed for comparison study of classical schemes and present scheme using higher-order Taylor series approximations. The displacement-dependent spring constant is:
P u Real Points Calculated Points TS1 TS2 TS3 TS4
TS1 TS2 TS3 TS4
Pi Pi+1
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, ISO 9001:2008 Certified Journal, Volume 6, Issue 2, February 2016)
5
) 1 ( ) (
0 0
U u K u
K (11)
In which K020,U04 . The exact solution of
relationship of displacement and load is
] ) 4 ( [ 2 1 )
( 1/2
0 0 2 0 0
K P U U U P
u (12)
For convenience of comparative study, schemes and their abbreviations are as follows: (1) Euler’s Method (Euler), (2) 2nd-Order Runge-Kutta Method (2nd-RK), (3) full Newton-Raphson Method (fNR), (4) Modified Newton-Raphson Method (mNR), (5) first to fourth order Taylor series approximations (TS1, TS2,TS3, TS4) based on exact derivatives (6) first to fourth order Taylor series expansions based on finite difference approximations of derivatives (aTS1, aTS2, aTS3, aTS4).
4.1 Using Exact Higher-Order Derivatives :
A. Equal Increment of Load:
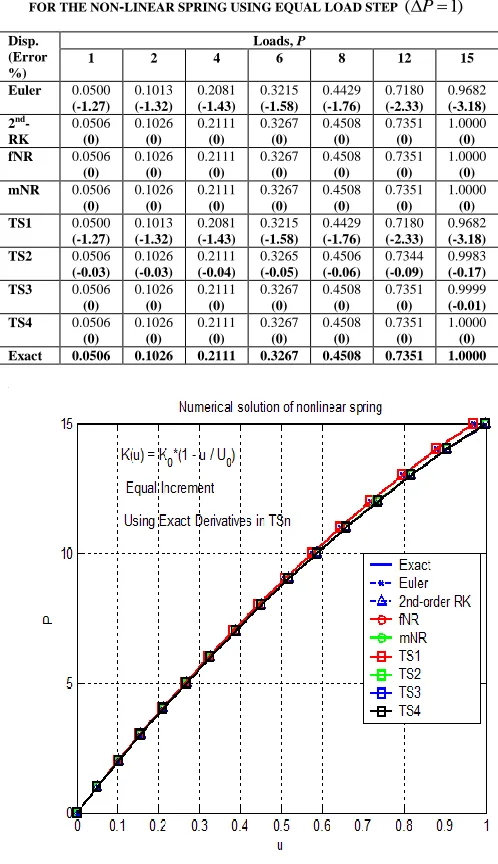
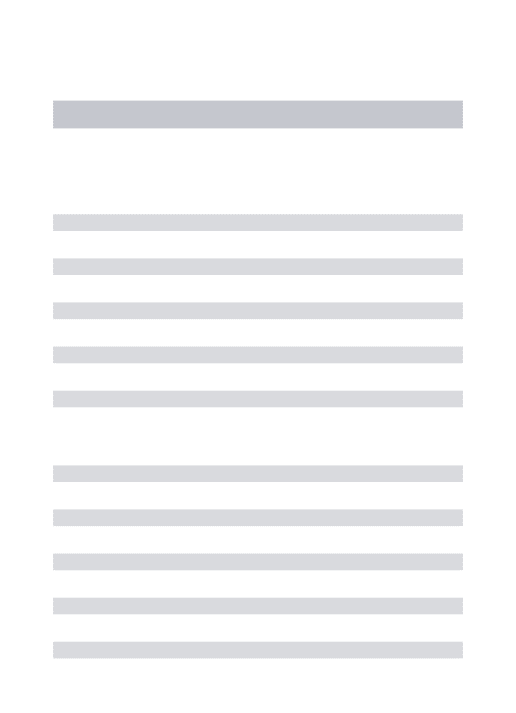
Table I shows the numerical comparison of exact and each approximate solutions for the nonlinear spring using 15 steps with equal load increment (P1)where error
percentage is defined to be
% 100 ] / ) [(
% uApprox.uExact uexact
Error . Digits in
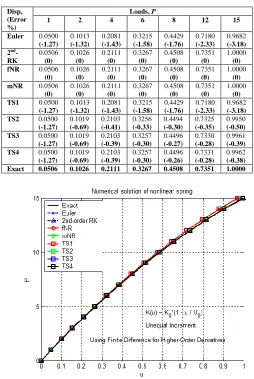
parenthesis after the numerical solutions are the corresponding errors between numerical solutions and exact solution. Results show that the present scheme depicts quick convergent and stable solutions. The load-displacement relationship obtained from each schemes are shown in Fig. 5. We can observe that the improvement of solution accuracy from TS1 (the same as Euler’s method) to TS2 is very significant while it is little from TS3 to TS4. If exact derivatives of higher-order derivatives can be obtained and equal increment of load step is employed, using TS2 orTS3 is enough for numerical analysis. The absolute maximal error of TS2, TS3, and TS4 is less than 0.2% as compared with 3.18% of TS1. The fNR and mNR schemes are accurate but require more sub-iterative calculations.
TABLEI
NUMERICAL COMPARISON OF EXACT AND APPROXIMATE SOLUTIONS FOR THE NON-LINEAR SPRING USING EQUAL LOAD STEP (P1)
Disp. (Error %)
Loads, P
1 2 4 6 8 12 15
Euler 0.0500 (-1.27)
0.1013 (-1.32)
0.2081 (-1.43)
0.3215 (-1.58)
0.4429 (-1.76)
0.7180 (-2.33)
0.9682 (-3.18) 2nd
-RK
0.0506 (0)
0.1026 (0)
0.2111 (0)
0.3267 (0)
0.4508 (0)
0.7351 (0)
1.0000 (0) fNR 0.0506
(0)
0.1026 (0)
0.2111 (0)
0.3267 (0)
0.4508 (0)
0.7351 (0)
1.0000 (0) mNR 0.0506
(0)
0.1026 (0)
0.2111 (0)
0.3267 (0)
0.4508 (0)
0.7351 (0)
1.0000 (0) TS1 0.0500
(-1.27) 0.1013 (-1.32)
0.2081 (-1.43)
0.3215 (-1.58)
0.4429 (-1.76)
0.7180 (-2.33)
0.9682 (-3.18) TS2 0.0506
(-0.03) 0.1026 (-0.03)
0.2111 (-0.04)
0.3265 (-0.05)
0.4506 (-0.06)
0.7344 (-0.09)
0.9983 (-0.17) TS3 0.0506
(0)
0.1026 (0)
0.2111 (0)
0.3267 (0)
0.4508 (0)
0.7351 (0)
0.9999 (-0.01) TS4 0.0506
(0)
0.1026 (0)
0.2111 (0)
0.3267 (0)
0.4508 (0)
0.7351 (0)
1.0000 (0) Exact 0.0506 0.1026 0.2111 0.3267 0.4508 0.7351 1.0000
Figure 6 Numerical results of load-displacement diagram obtained from various numerical schemes under equal load steps (P1)
[image:5.612.320.569.157.589.2]International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, ISO 9001:2008 Certified Journal, Volume 6, Issue 2, February 2016)
6
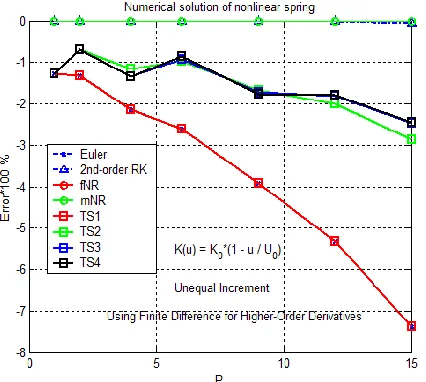
Figure 7 Numerical results of error variation with load step obtained from various numerical schemes under equal load steps (P1)
(Present method using exact higher-order derivatives in TS1,TS2, TS3, and TS4).
B. Unequal Increment of Load:
In real application we sometimes use the unequal increment of load for reducing the calculation time of whole loading history. Thus we consider use 7 steps of loads: {1, 2, 4, 6, 8, 12, 15}. The comparison results are shown in Table II, Fig. 6 and Fig. 7. It can be observed that as compared with using equal increment (Table I, Fig. 5
and Fig.6 ) absolute maximal errors of Euler’s method and
TS1 increase twice from 3.18% to 7.39%, while TS2, TS3 and TS4 increase from 0.17%, 0.01%, 0.00% to 1.08%, 0.21%, 0.05%, respectively. The influence of unequal load increment introduces little influence if higher-order approximations are included. However, it should be kept in mind too large load step might be avoided in the pratical application.
We can also find that the solutions of Taylor series converge rapidly to the exact solution, TS2 and TS3 gives very satisfactory numerical results with low cost of calculation time as compared with full and modified Newton-Raphson Methods.
TABLEII
NUMERICAL COMPARISON OF EXACT AND APPROXIMATE SOLUTIONS FOR THE NON-LINEAR SPRING USING UNEQUAL LOAD STEP
Disp. (Error %)
Loads, P
1 2 4 6 8 12 15
Euler 0.0500 (-1.27)
0.1013 (-1.32)
0.2066 (-2.15)
0.3181 (-2.61)
0.4965 (-3.92)
0.6960 (-5.31)
0.9261 (-7.39) 2nd
-RK
0.0506 (0)
0.1026 (0)
0.2111 (0)
0.3267 (0)
0.5167 (-0.01)
0.7349 (-0.02)
0.9994 (-0.06) fNR 0.0506
(0)
0.1026 (0)
0.2111 (0)
0.3267 (0)
0.5167 (0)
0.7351 (0)
1.0000 (0) mNR 0.0506
(0)
0.1026 (0)
0.2111 (0)
0.3267 (0)
0.5167 (0)
0.7351 (0)
0.9999 (-0.01) TS1 0.0500
(-1.27) 0.1013 (-1.32)
0.2066 (-2.15)
0.3181 (-2.61)
0.4965 (-3.92)
0.6960 (-5.31)
0.9261 (-7.39) TS2 0.0506
(-0.03) 0.1026 (-0.03)
0.2109 (-0.10)
0.3262 (-0.14)
0.5150 (-0.33)
0.7308 (-0.58)
0.9892 (-1.08) TS3 0.0506
(0)
0.1026 (0)
0.2111 (-0.01)
0.3266 (-0.01)
0.5166 (-0.04)
0.7345 (-0.09)
0.9979 (-0.21) TS4 0.0506
(0)
0.1026 (0)
0.2111 (0)
0.3267 (0)
0.5167 (-0.01)
0.7350 (-0.01)
[image:6.612.62.276.136.354.2]0.9995 (-0.05) Exact 0.0506 0.1026 0.2111 0.3267 0.5168 0.7351 1.0000
Figure 8 Numerical results of load-displacement diagram obtained from various numerical schemes under unequal load steps (Present method using exact higher-order derivatives in TS1,TS2, TS3, and
[image:6.612.321.564.162.582.2]International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, ISO 9001:2008 Certified Journal, Volume 6, Issue 2, February 2016)
7
Figure 9 Numerical results of error variation with load step obtained from various numerical schemes under unequal load steps (Present
method using exact higher-order derivatives in TS1,TS2, TS3, and TS4)
4.2 Using Finite Difference Approximations for Higher-Derivatives:
A. Equal Increment of Load:
Furthermore, when finite difference approximations of higher-order derivatives in Eq. (10) are employed, the results are shown in Table III, Fig. 10 and Fig. 11 using equal load increment. The errors obtained from TS2, TS3, and TS4 increase as expected. Compared with those in Table I, Fig. 6, and Fig. 7, the absolute maximal errors of TS2, TS3 and TS4 increase from 0.17%, 0.01%, 0.00% to 0.50%, 0.39%, 0.08%, respectively. The improvement of accuracy from TS1 to TS2 is also significant (from 3.18% to 0.17%).
TABLEIII
NUMERICAL COMPARISON OF EXACT AND APPROXIMATE SOLUTIONS FOR THE NON-LINEAR SPRING USING EQUAL LOAD STEP (P1)
Disp, (Error %)
Loads, P
1 2 4 6 8 12 15
Euler 0.0500 (-1.27)
0.1013 (-1.32)
0.2081 (-1.43)
0.3215 (-1.58)
0.4429 (-1.76)
0.7180 (-2.33)
0.9682 (-3.18) 2nd
-RK
0.0506 (0)
0.1026 (0)
0.2111 (0)
0.3267 (0)
0.4508 (0)
0.7351 (0)
1.0000 (0) fNR 0.0506
(0)
0.1026 (0)
0.2111 (0)
0.3267 (0)
0.4508 (0)
0.7351 (0)
1.0000 (0) mNR 0.0506
(0)
0.1026 (0)
0.2111 (0)
0.3267 (0)
0.4508 (0)
0.7351 (0)
1.0000 (0) TS1 0.0500
(-1.27) 0.1013 (-1.32)
0.2081 (-1.43)
0.3215 (-1.58)
0.4429 (-1.76)
0.7180 (-2.33)
0.9682 (-3.18) TS2 0.0500
(-1.27) 0.1019 (-0.69)
0.2103 (-0.41)
0.3256 (-0.33)
0.4494 (-0.30)
0.7325 (-0.35)
0.9950 (-0.50) TS3 0.0500
(-1.27) 0.1019 (-0.69)
0.2103 (-0.39)
0.3257 (-0.30)
0.4496 (-0.27)
0.7330 (-0.28)
0.9961 (-0.39) TS4 0.0500
(-1.27) 0.1019 (-0.69)
0.2103 (-0.39)
0.3257 (-0.30)
0.4496 (-0.26)
0.7331 (-0.28)
0.9962 (-0.38) Exact 0.0506 0.1026 0.2111 0.3267 0.4508 0.7351 1.0000
Figure 10 Numerical results of load-displacement diagram obtained
from various numerical schemes under equal load steps
(
P
1
)
(Present method using finite difference approximations of [image:7.612.317.571.166.545.2]International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, ISO 9001:2008 Certified Journal, Volume 6, Issue 2, February 2016)
[image:8.612.59.278.140.312.2]8
Figure 11 Numerical results of error variation with load step obtained from various numerical schemes under equal load steps (P1)
(Present method using finite difference approximations of higher-order derivatives in TS2, TS3, and TS4).
B. Unequal Increment of Load:
Finally the numerical results of calculated displacements and errors compared with exact solution for unequal load steps, {1, 2, 4, 6, 8, 12, 15}, where finite difference approximations for higher-derivatives are employed, are shown in Table IV, Fig.12, and Fig.13. When compared with those results in Table II, Fig. 8, and Fig. 9, we can find that the absolute maximal errors of TS2, TS3 and TS4 increase from 1.08%, 0.21%, 0.05% to 2.86%, 2.47%, 2.45%, respectively. Nevertheless, the absolute maximal errors of all the solutions using higher-order expansions are less than that of TS1 and Euler’s method (7.39%). The improvement of accuracy from TS1 to TS2 is still very huge.
TABLEIV
NUMERICAL COMPARISON OF EXACT AND APPROXIMATE SOLUTIONS FOR THE NON-LINEAR SPRING USING UNEQUAL LOAD STEP
Disp, (Error %)
Loads,P
1 2 4 6 8 12 15
Euler 0.0500 (-1.27)
0.1013 (-1.32)
0.2066 (-2.15)
0.3181 (-2.61)
0.4965 (-3.92)
0.6960 (-5.31)
0.9261 (-7.39) 2nd
-RK
0.0506 (0)
0.1026 (0)
0.2111 (0)
0.3267 (0)
0.5167 (-0.01)
0.7349 (-0.02)
0.9994 (-0.06) fNR 0.0506
(0)
0.1026 (0)
0.2111 (0)
0.3267 (0)
0.5167 (0)
0.7351 (0)
1.0000 (0) mNR 0.0506
(0)
0.1026 (0)
0.2111 (0)
0.3267 (0)
0.5167 (0)
0.7351 (0)
0.9999 (-0.01) TS1 0.0500
(-1.27) 0.1013 (-1.32)
0.2066 (-2.15)
0.3181 (-2.61)
0.4965 (-3.92)
0.6960 (-5.31)
0.9261 (-7.39)
TS2 0.0500
(-1.27) 0.1019 (-0.69)
0.2087 (-1.16)
0.3235 (-0.98)
0.5082 (-1.66)
0.7203 (-2.01)
0.9714 (-2.86) TS3 0.0500
(-1.27) 0.1019 (-0.69)
0.2083 (-1.34)
0.3236 (-0.93)
0.5079 (-1.71)
0.7218 (-1.81)
0.9753 (-2.47) TS4 0.0500
(-1.27) 0.1019 (-0.69)
0.2083 (-1.34)
0.3239 (-0.86)
0.5076 (-1.77)
0.7220 (-1.79)
0.9755 (-2.45) Exact 0.0506 0.1026 0.2111 0.3267 0.5168 0.7351 1.0000
Figure 12 Numerical results of load-displacement diagram obtained from various numerical schemes under unequal load steps (Present
[image:8.612.319.570.165.524.2]International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, ISO 9001:2008 Certified Journal, Volume 6, Issue 2, February 2016)
[image:9.612.66.279.140.331.2]9
Figure 13 Numerical results of error variation with load step obtained from various numerical schemes under unequal load steps (Present
method using finite difference approximations of higher-order derivatives in TS2, TS3, and TS4)
V. CONCLUDING REMARKS
An innovative scheme for numerical solution of non-linear elasticity problems using higher-order Taylor series expansion is proposed and verified. Comparison study of this algorithm with those classical schemes, such as Euler’s
method, 2nd-Runge-Kutta method, full- and modified
Newton-Raphson method, is conducted using equal and unequal load increments for a problem with nonlinear spring. When problems in which exact higher-order derivatives can not be derived directly are encountered, finite difference approximations of these higher-order terms can be employed. Numerical results of load-displacement relationship and error variation show that the proposed scheme using TS2, TS3 and TS4 is efficient and accurate and can be extended and applied to nonlinear elasticity problems with large systems. As compared with classical Euler’s method (TS1), adding one more order term (TS2) can improve the numerical accuracy significantly.
REFERENCES
[1] Desai,C. S. and Abel, J. F. 19972.Introduction to The Finite Element Method: A Numerical Method for Engineering Analysis, Litton Education Publishing, Inc.
[2] Martin, H. C. and Carey, G. F. 1973. Introduction to Finite Element Analysis, McGraw-Hill Book Company, New York.
[3] Zienkiewicz, O. C. 1977. The Finite Element Method, McGraw-Hill, Inc.
[4] Bathe, K-J. 1982. Finite Element Procedures in Engineering Analysis, Prentice-Hall, Inc.
[5] Wilson, E. L. 2000. Three-Dimensional Static and Dynamic Analysis of Structures, Computers & Structures, Inc.
[6] Cook, R. D., Malkus, D. S., Plesha, M. E. and Witt, R.J. 2002. Concepts and Applications of Finite Element Analysis, John Willey & Sons, Inc.
[7] Oden, J. T. 1967. Numerical Formulation of Non-Linear Elasticity Problems, J. Struct. Div. An. Soc. Civil Engng. 93(ST3), 235-255. [8] Crisfield, M. A. 1991. Non-Linear Finite Element Analysis of Solids
and Structures, Vol. 1: Essentials, John Wiley& Sons, Chichester, UK.
[9] Crisfield, M. A. 1997. Non-Linear Finite Element Analysis of Solids and Structures, Vol. 2: Advanced Topics, John Wiley& Sons, Chichester, UK.
[10] Antman, S. S. 1995. Nonlinear Problems of Elasticity, Springer-Verlag, New York.
[11] Holzapfel, G. A. 2000. Nonlinear Solid Mechanis: A Continuum Approach for Engineering, John Wiley & Sons.
[12] Hellweg, H.-B. and Crisfield, M. A. 1998. A New Arc-Length Method for Handling Sharp Snap-Backs, Computers & Structures, 66(5), 705-709.
[13] Bellini, P. X. and Chulya, A. 1987. An Improved Automatic Incremental Algorithm for the Efficient Solution of Nonlinear Finite Element Equations, Computers & Structures, 26(1/2), 99-110. [14] Chang, C. C. 1991. Periodically Restarted Quasi-Newton Updates in
Constant Arc-Length Method, Computers & Structures, 41(5), 963-972.
[15] Chang, C. C. 1992. Consistent-Stiffness Iteration Method for Elastic-Plastic Analysis, Computers & Structures, 43(2), 255-263.
[16] Zienkiewicz, O. C. and Lohner, R. 1985. Accelerated Relaxation or Direct Solution? Future Progress for FEM. Int. J. Numer. Meth. Engng., 21(1), 1-11.
[17] Zhang, L. C. and Kadkhodayan, M. and Mai, Y. W. 1994. Development of the maDR method. Computers & Structures, 52(1), 1-8.
[18] Abdel-Gaffar, M. M., White, D. W. and Chen, W. F. 1993. An Error Estimate and Step Size Control Method for Nonlinear Solution Technique, Finite Elements in Analysis and Design, 13(2-3), 137-148.
[19] Abbo, A. J. and Sloan, S. W. 1996. An Automatic Load Stepping Algorithm with Error Control, Int. J. Numer. Meth. Engng., 39(10), 1737-1759
[20] Sloan, S. W. 1987. Substepping Scheme for the Numerical Integration of Elastoplastic Stress-Strain Relations, Int. J. Numer. Meth. Engng., 24(5), 893-911
[21] Li, L. Y. and Bettess, P. 1997. Error Estimates and Adaptive Remeshing Techniques in Elasto-Plasticity, Commu. Numer. Engng., 13(4), 285-299.
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, ISO 9001:2008 Certified Journal, Volume 6, Issue 2, February 2016)
10
[23] Dohrmann, C. R. 2003. A Preconditioner for Substructuring Based on Constrained Energy Minimization, SIAM J. Sci. Comput., 25(1), 246-258.
[24] Mandel, J. and Dohrmann, C. R. 2003. Convergence of Balancing Domain Decomposition by Constraints and Energy Minimization, Numer. Linear Algebra Appl. 10, 639-659.