Characterising Testing Preorders for Finite Probabilistic Processes
Yuxin Deng
∗ Jiao Tong UniversityShanghai, China
School of CSE, University of New South Wales Sydney, Australia
Rob van Glabbeek
National ICT AustraliaSydney, Australia
Matthew Hennessy
Department of InformaticsUniversity of Sussex Falmer, Brighton, UK
Carroll Morgan
∗Chenyi Zhang
National ICT AustraliaSchool of Computer Science and Engineering The University of New South Wales
Sydney, Australia
Abstract
In 1992 Wang & Larsen extended the may- and must pre-orders of De Nicola and Hennessy to processes featuring probabilistic as well as nondeterministic choice. They con-cluded with two problems that have remained open through-out the years, namely to find complete axiomatisations and alternative characterisations for these preorders. This pa-per solves both problems for finite processes with silent moves. It characterises the may preorder in terms of simu-lation, and the must preorder in terms of failure simulation. It also gives a characterisation of both preorders using a modal logic. Finally it axiomatises both preorders over a probabilistic version of CSP.
1. Introduction
A satisfactory semantic theory for processes which encom-pass both nondeterministic and probabilistic behaviour has been a long-standing research problem [12, 35, 23, 17, 32, 33, 30, 18, 27, 31, 13, 21, 26, 1, 19, 24, 3, 34, 7]. In 1992 Wang & Larsen posed the problems of finding complete ax-iomatisations and alternative characterisations for a natural generalisation of the standard testing preorders [6] to such processes [35]. Here we solve both problems, at least for finite processes, by providing a detailed account of both may- and must testing preorders for a finite version of the process calculus CSP extended with probabilistic choice. For each preorder we provide three independent character-isations, using (i) co-inductive simulation relations, (ii) a modal logic and (iii) sets of inequations.
Testing processes: Our starting point is the finite process calculuspCSP[8] obtained by adding a probabilistic choice operator to finite CSP; like others who have done the same, we now havethreechoice operators, externalP 2Q,
inter-∗We acknowledge the support of the Australian Research Council
(ARC) Grant DP034557.
nalPQand the newly added probabilistic choicePp⊕Q. So a semantic theory forpCSPwill have to provide a co-herent account of the precise relationships between these operators.
As a first step, in Sec. 2 we provide an interpretation of pCSP as a probabilistic labelled transition system, in which, following [32], transitions likes−→α s from stan-dard labelled transition systems are generalised to the form s −→α ∆, where∆ is adistribution, a mapping assigning probabilities to states. With this interpretation we obtain in Sec. 3 a version of the testing preorders of [6] for pCSP processes,pmay andpmust. These are based on the
abil-ity of processes to pass tests; the tests we use are simply pCSPprocesses in which certainstatesare marked as suc-cess states. See [8] for a detailed discussion of the power of such tests.
The object of this paper is to give useful characterisations of these testing preorders. This problem was addressed previously by Segala in [31], but using testing preorders
Ω
pmay andΩpmustthat differ in two ways from the ones in
[6, 14, 35, 8] and the present paper. First of all, in [31] the success of a test is achieved by theactual executionof a pre-definedsuccess action, rather than the reaching of a success state. We call this anaction-based, as opposed to astate -based, approach. Secondly, [31] employs a countable num-ber of success actions instead of a single one; we call this vector-based, as opposed toscalar, testing. Segala’s results in [31] depend crucially on this form of testing. To achieve our current results, we need Segala’s preorders as a stepping stone. We relate them to ours by considering intermediate preorderspmayandpmustthat arise from action-based but
scalar testing, and use a recent result [9] saying that for fi-nite processes the preordersΩpmayandΩpmustcoincide with
pmayandpmust. Here we show that onpCSPpmayand
pmustalso coincide withpmayandpmust.1
Simulation preorders: In Sec. 4 we use the transitions s−→α ∆to define two co-inductive preorders, the
tionpreorderS [30, 24, 8], and the novelfailure simula-tionpreorderFS overpCSPprocesses. The latter extends the failure simulation preorder of [10] to probabilistic pro-cesses. Their definition uses a natural generalisation of the transitions, first (Kleisli-style) to take the form∆−→α ∆, and then toweakversions∆ =α⇒ ∆. The latter preorder differs from the former in the use of a failure predicate s −→X , indicating that in the statesnone of the actions in X can be performed.
Both preorders are preserved by all the operators in pCSP, and aresoundwith respect to the testing preorders; that isP S QimpliesP pmay QandP FS Q
im-pliesP pmust Q. ForS this was established in [8], and
the proofs forFS are similar. Butcompleteness, that the testing preorders imply the respective simulation preorders, requires some ingenuity. We prove it indirectly, involving a characterisation of the testing and simulation preorders in terms of a modal logic.
Modal logic: Our modal logic, defined in Sec. 7, uses finite conjunction i∈Iϕi, the modality aϕ from the Hennessy-Milner Logic, and a novel probabilistic construct
i∈Ipi·ϕi. A satisfaction relation between processes and formulae then gives, in a natural manner, alogical preorder between processes: P LQmeans that everyL-formula satisfied byP is also satisfied byQ. We establish thatL coincides withS andpmay.
To capture failures, we add, for every set of actionsX, a formula ref(X) to our logic, satisfied by any process which, after it can do no further internal actions, can per-form none of the actions inXeither. The constructs,a andref()stem from the modal characterisation of the non-probabilistic failure simulation preorder, given in [10]. We show thatpmust, as well asFS, can be characterised in a
similar manner with this extended modal logic.
Proof strategy: We prove these characterisation results through two cycles of inclusions:
L ⊆
S
[8]
⊆ pmay ⊆ pmay
[9]
= Ωpmay ⊆ L
F ⊆
FS ⊆ pmust ⊆ pmust [9]
= Ωpmust ⊆ F
Sec. 7 Sec. 4 Sec. 3 Sec. 5 Sec. 6 Sec. 8
In Sec. 7 we show that P L Qimplies P S Q(and henceP pmayQ), and likewise forFandFS; the proof
involves constructing, for eachpCSPprocessP, a charac-teristic formulaϕP. To obtain the other direction, in Sec. 8 we show how every modal formulaϕcan be captured, in some sense, by a testTϕ; essentially the ability of apCSP process to satisfyϕis determined by its ability to pass the testTϕ. We capture the conjunction of two formulae by a probabilistic choice between the corresponding tests; in or-der to prevent the results from these tests getting mixed up,
we employ the vector-based tests of [31], so that we can use different success actions in the separate probabilistic branches. Therefore, we complete our proof by demonstrat-ing that the state-based testdemonstrat-ing preorders imply the action-based ones (Sec. 5) and recalling the result from [9] that the action-based scalar testing preorders imply the vector-based ones (Sec. 6).
Equations: It is well-known that may- and must testing for standard CSP can be captured equationally [6, 2, 14]. In [8] we showed that most of the standard equations are no longer valid in the probabilistic setting ofpCSP; we also provided a set of axioms which are complete with respect to (probabilistic) may-testing for the sub-language ofpCSP without probabilistic choice. Here we extend this result, by showing, in Sec. 10, that bothP pmay QandP pmustQ
can still be captured equationally over full pCSP. In the may case the essential (in)equation required is
a.(Pp⊕Q) a.Pp⊕a.Q
The must case is more involved: in the absence of the dis-tributivity of the external and internal choices over each other, to obtain completeness we require a complicated in-equational schema.
2. Finite probabilistic CSP
LetActbe a finite set of actions, ranged over bya, b,· · ·, which processes can perform. Then the finite probabilistic CSP processes are given by the following two-sorted syn-tax:
P ::= S | Pp⊕P
S ::= 0 | a.P | P P | S2S | S|AS
Here P p⊕ Q, for0 < p < 1, represents aprobabilistic
choicebetweenP andQ: with probabilitypit will act like P and with probability1−pit will act likeQ. Any process is a probabilistic combination of state-based processes (the sub-sort S above) built by repeated application of the op-eratorp⊕. The state-based processes have a CSP-like syn-tax, involving the stopped process0, action prefixinga. , internal-andexternal choicesand2, and aparallel com-position|AforA⊆Act.
The processP Qwill first do a so-calledinternal ac-tionτ∈Act, choosingnondeterministicallybetweenPand Q. Therefore, likea. , acts as aguard, in the sense that it converts any process arguments into a state-based process.
rather than a probability distribution of states, we require its arguments to be state-based as well; the same applies to|A. ExpressionsP 2 QandP |A Qfor processesP andQ that arenotstate-based are therefore syntactic sugar for an expression in the above syntax obtained by distributing2 and|Aoverp⊕.
Finally, the expressionP |A Q, whereA ⊆Act, repre-sents processesPandQrunning in parallel. They may syn-chronise by performing the same action fromA simultane-ously; such a synchronisation results inτ. In additionPand Qmay independently do any action from(Act\A)∪ {τ}.
[image:3.612.317.552.71.231.2]We writepCSPfor the set of process terms defined by this grammar, and sCSP for the subset comprising only the state-based process terms. The full language of CSP [2, 15, 29] has many more operators; we have simply cho-sen a reprecho-sentative selection, and have added probabilistic choice. Our parallel operator is not a CSP primitive, but it can easily be expressed in terms of them—in particular P |A Q = (PAQ)\A, whereA and\A are the paral-lel composition and hiding operators of [29]. It can also be expressed in terms of the parallel composition, renam-ing and restriction operators of CCS. We have chosen this (non-associative) operator for convenience in defining the application of tests to processes.
As usual we may elide0; the prefixing operatora. binds stronger than any binary operator; and precedence between binary operators is indicated via brackets or spacing. We will also sometimes use indexed binary operators, such as
i∈Ipi·Piwithi∈Ipi= 1and allpi>0, andi∈IPi. The above intuitions are formalised by an operational semanticsassociating with each process term a graph-like structure representing its possible reactions to users’ re-quests: we use a generalisation of labelled transition sys-tems [25] that includes probabilities.
A (discrete) probability distribution over a set S is a function ∆ : S → [0,1]with s∈S∆(s) = 1; the sup-portof∆is given by∆ = {s∈S | ∆(s) > 0}. We writeD(S), ranged over by∆,Θ,Φ, for the set of all distri-butions overSwith finite support; these finite distributions are sufficient for the results of this paper. We also writes to denote the point distribution assigning probability 1 tos and 0 to all others, so thats={s}.
For∆a distribution overSand functionf:S→Xinto a vector spaceX(typically the reals2) we writes∈S∆s·fs or Exp∆(f) for s∈S∆(s)·f(s), the weighted average of the fs, or expected value of f. When p∈[0,1], we also write f1 p⊕ f2 for p·f1 + (1−p)·f2. More gen-erally, for function F : S →
P
+(X) withP
+(X) be-ing the collection of non-empty subsets of X, we define Exp∆F := {Exp∆(f) | f ∈ F}, wheref ∈ F means thatf is achoice functionwithf(s)∈F(s)for alls∈S.2Other possibilities are tuples of reals, or distributions over some set.
a.P −→a P
P Q−→τ P PQ
τ
−→ Q
s1−→a ∆
s12s2−→a ∆
s2−→a ∆
s12s2−→a ∆
s1−→τ ∆
s12s2−→τ ∆2s2
s2−→τ ∆
s12s2−→τ s12∆
s1−→α ∆ α∈A s1|As2−→α ∆|As2
s2−→α ∆ α∈A s1|As2−→α s1|A∆
s1−→a ∆1, s2−→a ∆2 a∈A s1|As2−→τ ∆1|A∆2
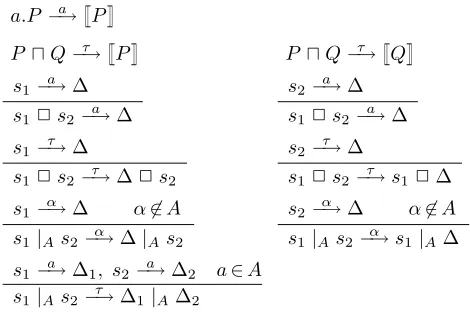
Figure 1. Operational semantics ofpCSP.
We now give the probabilistic generalisation (pLTSs) of labelled transition systems (LTSs):
Definition 1 Aprobabilistic labelled transition systemis a tripleS,Actτ,→, where
(i) Sis a set of states
(ii) Actτ is a set of actions Act, augmented byτ∈Act; we letarange overActandαoverActτ.
(iii) relation→is a subset ofS×Actτ× D(S).
As with LTSs, we usually writes−→α ∆for(s, α,∆)∈ →, s −→α for∃∆ : s−→α ∆ands→for∃α:s−→α . An LTS may be viewed as a degenerate pLTS, one in which only point distributions are used.
We now define the operational semantics ofpCSPby means of a particular pLTSsCSP,Actτ,→, constructed by tak-ingsCSPto be the set of states and interpretingpCSP pro-cessesP as distributions P∈ D(sCSP)as follows:
s := s fors∈sCSP
Pp⊕Q := Pp⊕ Q.
Note that for eachP ∈pCSPthe distribution Pis finite, i.e. it has finite support. The definition of the relations−→α is given in Fig. 1. These rules are very similar to the standard ones used to interpret CSP as an LTS [29], but modified so that the result of an action is a distribution. We sometimes writeτ.P forP P, thus givingτ.P −→τ P.
3. Testing
pCSP
processes
processP we form the processT |ActP in whichall visi-ble actions ofP must synchronise withT, and define a set of testing outcomesA(T, P)where each outcome, in[0,1], arises from a resolution of the nondeterministic choices in T |Act P and gives the probability that this resolution will reach asuccess state, one in whichωis possible.
To this end, we inductively define a results-gathering functionV : S →
P
+([0,1]); it extends to typeD(S) →P
+([0,1])via the conventionV(∆) :=Exp∆V.
V(s) :=
{1} ifs−→ω ,
{V(∆) | s−→τ ∆} ifs−→ω , s−→τ ,
{0} ifs→
Note that these choices are exhaustive becauseT |Act Phas onlyτ, ω actions, and thatVis well defined when applied to finite, loop-free pLTSs, such as the one ofpCSP.
Definition 2 For anypCSPprocessPand testT, define
A(T, P) := V T|ActP.
With this definition, the general testing framework of [6] yields two testing preorders forpCSP, one based onmay testing, writtenP pmay Q, and the other onmusttesting,
writtenP pmustQ.
Definition 3 Themay-andmustpreorders are given by
P pmayQ iff ∀testsT:A(T, P)≤HoA(T, Q)
PpmustQ iff ∀testsT:A(T, P)≤SmA(T, Q)
with≤Ho,≤Smthe Hoare, Smyth preorders on
P
+[0,1].34. Simulation and failure simulation
LetR ⊆S× D(S)be a relation from states to distributions. We lift it to a relationR ⊆ D(S)×D(S)by letting∆RΘ whenever there is an index setIandp∈ D(I)such that
(i) ∆ =i∈Ipi·si,
(ii) For eachi∈Ithere is a distributionΦis.t.siRΦi, (iii) Θ =i∈Ipi·Φi.
For notational convenience, the lifted versions of the transi-tion relatransi-tions−→α forα∈Actτare again denoted−→α .
We writes −→ˆτ ∆if eithers −→τ ∆or∆ = s; again ∆1−→τˆ ∆2denotes the lifted relation. Thus e.g. we have
(ab)1
2⊕(ac)
ˆ τ
−→ a1
2⊕((ab)12⊕c) [8]. We now define the weak transition relation=τ⇒ˆ as the transitive and reflexive closure−→τˆ ∗of−→τˆ , while fora=τ
∆1 =⇒ˆa ∆2denotes∆1 =⇒τˆ −→a =τ⇒ˆ ∆2. We writes −→X withX ⊆ Actwhen ∀α∈ X ∪ {τ} : s −→α , and∆ −→X when∀s∈ ∆:s−→X .
3The Hoare order is defined byX≤
HoY iff∀x∈X:∃y∈Y:x≤y, similarly the Smyth order byX≤SmY iff∀y∈Y:∃x∈X:x≤y.
Definition 4 A relationR ⊆S× D(S)is said to be a fail-ure simulationif for alls,Θ, α,∆we have that
• sRΘ∧s−→α ∆implies∃Θ: Θ=αˆ⇒Θ∧∆RΘ • sRΘ∧s−→X ∆implies∃Θ: Θ=ˆτ⇒Θ∧Θ−→X . We writes FS Θto mean that there is some failure
simu-lationRsuch thatsRΘ. Similarly, we definesimulation andsSΘby dropping the second clause in Def. 4.
Definition 5 Thesimulation preorderS andfailure sim-ulation preorderFS onpCSPare defined as follows:
P SQ iff Q
ˆ τ
=⇒Θfor someΘwith P
SΘ
P FS Q iff P
ˆ τ
=⇒Θfor someΘwith Q
FSΘ.
(Note the opposing directions.) The kernels ofSandFS are called(failure) simulation equivalence, denotedSand FS, respectively.
We have already shown in [8] thatS is a precongruence and that it impliespmay. Similar results can be established
forFS as well. We summarise these facts as follows:
Proposition 1 Suppose ∈ {S,FS}. Thenis a pre-order, and if Pi Qi fori = 1,2thena.P1 a.Q1for a∈ActandP1P2 Q1Q2 for ∈ {,2,p⊕, |A}.
Proof: The case S was proved in [8, Cor. 6.10 and Thm. 6.13]; the caseFS is analogous. 2
Theorem 1
1. IfP S QthenP pmayQ.
2. IfP FS QthenP pmustQ.
Proof: The first clause was proved in [8, Thm. 6.17]; the
second can be shown similarly. 2
The next four sections are devoted to obtaining the con-verse.
5. State- versus action-based testing
Much work on testing [6, 35, 8] uses successstatesmarked by outgoingω-actions; in other work [31, 9], however, it is theactual executionofωthat constitutes success. The for-mer,state-based testing, leads to the preorders we defined in Sec. 3; the latter,action-basedtesting, leads to slightly different preorderspmay andpmust. Without probability
there is no difference between may and may; but
pos-sible divergence makesmust strictly more discriminating
thanmust, and in factmustcoincides with CSP refinement
based on failures and divergences [2, 15, 29]. The action-based approach is formalised as in the state-action-based approach, via a suitableV:
V(s) :=
{V(∆)|s−→τ ∆} ∪ {1|s−→ }ω ifs→
Proposition 2
1. IfP pmayQthenP pmayQ. 2. IfP pmustQthenPpmustQ.
Proof: For any testTconstructT by replacing each sub-termω.Qbyτ.ω; thenV T |Act P =V T|Act Pfor all
pCSPprocessesP. 2
In fact we use the action-based preorders in Thm. 2 below, a (quasi-, thus) converse of Thm. 1; but with Prop. 2 above the two kinds of preorders become identified so that Thms. 1 and 2 are converse to each other.
Theorem 2
1. IfP pmayQthenP S Q.
2. IfP pmustQthenPFS Q.
We set this theorem as our goal in the next three sections.
6. Vector-based testing
This section describes another variation on testing, a richer testing framework due to Segala [31], in which countably many success actions exist: the application of a test to a process yields a set ofvectorsover the real numbers, rather than a set of scalars. The resulting action-based testing pre-orders will serve as a stepping stone in proving Thm. 2.
LetΩbe asetof fresh success actions withΩ∩Actτ =∅. An Ω-test is again a pCSP process, but this time allow-ing subterms ω.P for any ω∈Ω. Applying such a test to a process yields a non-empty set of test outcome-tuples
AΩ(T, P) ⊆ [0,1]Ω. Eachtuplearises from a resolution within T |Act P of nondeterministic choices into proba-bilistic choices, and itsω-component gives the probability that this resolution will perform the success actionω.
For vectors we again inductively define a results-gathering function VΩ : S →
P
+
[0,1]Ω; it extends to type D(S)→
P
+[0,1]Ω via VΩ(∆) := Exp∆VΩ just as VandV did. First, for anyαdefineα! : [0,1]Ω→[0,1]Ω so thatα!o(ω)becomes 1 ifω=αbut remainso(ω) other-wise; this function lifts to setsO ⊆ [0,1]Ωas usual, via α!O:={α!o|o∈O}. Now we define
VΩ
(s) :=
{α!(VΩ(∆)) | s−→α ∆} ifs→
{0} otherwise
where0∈[0,1]Ωis given by0(ω) = 0for allω ∈Ω, and theconvex closureXof a setX is defined
X :={i∈Ipi·oi | p∈ D(I)ando:I→X}.
We extend our earlier results-gathering definitions so that
V(s) := V(s) andV(s) := V(s). Note that in case
Ω := {ω}we haveVΩ = V, and the convex-closing
pre-orders based onV,Vcoincide with the simpler ones based
onV,V. Thus convex closure matters only for proper vec-tors, as explained in the remark following Def. 6.
In [9] the results-gathering function VΩ with Ω =
{ω1, ω2,· · · }was called simplyW(because action-based/ convex/vector-based testing was assumed there throughout, making the·Ω-indicators superfluous); and it was defined in terms of a formalisation of the notion of a resolution. The inductive definition above yields the same results.
Definition 6 For anypCSPprocessPandΩ-testT, let
AΩ
(T, P) := VΩ T|ActP.
Thevector-based may-andmustpreorders are given by
P ΩpmayQ iff ∀Ω-testsT:AΩ(T, P)≤HoAΩ(T, Q)
P ΩpmustQ iff ∀Ω-testsT:AΩ(T, P)≤SmAΩ(T, Q)
where≤Hoand≤Sm are the Hoare- and Smyth preorders on
P
+[0,1]Ωgenerated from≤index-wise on[0,1]Ωitself.Remark: For proper vector-based testing, convex closure matters, as it allows internal choice to simulate probabilistic choice [13]. Consider the following two processes
P :=ab(a1
2⊕b) and Q:=ab.
It is obvious that P S Q, and from Thm. 1 it therefore follows that P pmay Q. However if Ω = {ω1, ω2} and
we remove the convex closure in the definition ofVΩ, then with the testT :=a.w12b.w2we would have
AΩ(T, P) ={(1,0),(0,1),(0.5,0.5)}
AΩ(T, Q) ={(1,0),(0,1)}
and so AΩ(T, P) ≤Ho AΩ(T, Q). However, their con-vex closuresAΩ(T, P)andAΩ(T, Q)arerelated under the
Hoare preorder. 2
The testing preorders of [31] are obtained by takingΩ to be a countably infinite set, whereas the preorderspmay
andpmustof Sec. 5 were obtained by takingΩto be the
singleton set{ω}. In [9] we established that for our finite pCSPprocesses the two coincide:
Theorem 3 [9].
1. P ΩpmayQiffP pmayQ
2. P ΩpmustQiffP pmustQ. 2
Thus, with the if-direction of Thm. 3, for Thm. 2 it will suffice to show that P ΩpmayQ implies P S Q and P Ωpmust Q impliesP FS Q. The crucial characteris-tics ofAΩ needed for that implication are summarised in
Lemma 1 LetPbe apCSPprocess, andT, Tibe tests.
1. o∈AΩ(ω, P)iffo=ω.
2. Suppose the actionωdoes not occur in the testT. Theno∈AΩ(ω2a.T, P)witho(ω) = 0iff there is a ∆∈ D(sCSP)with P
ˆ a
=⇒∆ando∈AΩ(T,∆).
3. 0∈AΩ(
a∈Xa.ω, P)iff∃∆ : P
ˆ τ
=⇒∆−→X .
4. o∈AΩ(i∈Ipi·Ti, P)iffo=i∈Ipioifor certain oi ∈AΩ(Ti, P).
5. o∈AΩ(i∈ITi, P)iff for alli∈Ithere arepi∈[0,1] and∆i∈ D(sCSP)such that P
ˆ τ
=⇒i∈Ipi·∆iand o=i∈Ipioifor certainoi∈AΩ(Ti,∆i).
Hereω∈ [0,1]Ωis given byω(ω) = 1andω(ω) = 0for
ω=ω. 2
In writing AΩ(T,∆) above we treat a distribution ∆ as
thepCSPexpressions∈∆∆s·s; and as usual we define
AΩ
(T,∆) :=Exp∆AΩ(T, ).
7. Modal logic
Our next step towards Thm. 2 is to define a setF of modal formulae, inductively, as follows:
• aϕ∈ Fwhenϕ∈ Fanda∈Act, • ref(X)∈ FwhenX ⊆Act,
• i∈Iϕi∈ Fwhenϕi∈ Ffor alli∈I, withIfinite • andi∈Ipi·ϕi∈ Fwhenpi∈[0,1]andϕi∈ Ffor all
i∈I, withIa finite index set, andi∈Ipi= 1. We often writeϕ1p⊕ϕ2for
i∈{1,2}pi·ϕi withp=p1, andϕ1∧ϕ2fori∈{1,2}ϕiand finallyfori∈∅ϕi.
Thesatisfaction relation|=⊆ D(sCSP)× Fis given by: • ∆|=aϕiff there is a∆with∆=⇒ˆa ∆and∆ |=ϕ, • ∆ |= ref(X) iff there is a∆ with ∆ =τ⇒ˆ ∆ and
∆ −→X ,
• ∆|=i∈Iϕiiff∆|=ϕifor alli∈I
• and∆|=i∈Ipi·ϕi iff there are∆i∈ D(sCSP), for alli∈I, with∆i|=ϕi, such that∆=τ⇒ˆ i∈Ipi·∆i. LetLbe the subclass ofFobtained by skipping theref(X) clause. We writeP L Qjust when P |= ϕ implies
Q |=ϕfor allϕ∈ L, andP
FQjust when P
|= ϕ is implied by Q |=ϕfor allϕ∈ F. (Note the opposing directions.)
Definition 7 Thecharacteristic formulaϕsorϕ∆of a pro-cesss∈sCSPor∆∈ D(sCSP)is defined inductively:
• ϕs:=s a−→∆aϕ∆∧ref({a|s−→}a )ifs−→τ , • ϕs:=s a−→∆aϕ∆∧s τ−→∆ϕ∆otherwise, • ϕ∆:=s∈∆∆(s)·ϕs.
Here the conjunctions s a−→∆ range over suitable pairs a,∆, ands τ−→∆ranges over suitable∆.
Writeϕψwithϕ, ψ∈ F if for each distribution∆one has ∆ |= ϕimplies∆ |= ψ. Then it is easy to see that ϕsϕsandi∈Iϕiϕifor anyi∈I.
The following property can be established by an easy in-ductive proof.
Lemma 2 For any∆∈ D(sCSP)we have∆|=ϕ∆. 2
It and the following lemma help to prove Thm. 4.
Lemma 3 For any processesP, Q ∈ pCSPwe have that P|=ϕ
Q
impliesPFS Q.
Proof: DefineRbysRΘiffΘ|=ϕs. We first show that
Θ|=ϕ∆ implies ∃Θ : Θ=⇒τˆ Θ∧∆RΘ. (1)
SupposeΘ|=ϕ∆withϕ∆=i∈Ipi·ϕsi, so that we have ∆ = i∈Ipi·si and for alli∈I there areΘi∈ D(sCSP) withΘi|=ϕsisuch thatΘ=⇒τˆ ΘwithΘ :=
i∈Ipi·Θi. SincesiRΘifor alli∈Iwe have∆RΘ.
Now we show thatRis a failure simulation.
• Supposes R Θands −→τ ∆. Thenϕs ϕ∆, so Θ|=ϕ∆. Now apply (1).
• SupposesRΘands−→a ∆witha∈A. Thenϕs
aϕ∆, soΘ|=aϕ∆. Hence∃ΘwithΘ=a⇒ˆ Θand Θ|=ϕ∆. Now apply (1).
• Supposes RΘands−→X withX ⊆A. Thenϕs ref(X), soΘ|=ref(X). Hence∃Θ withΘ=τ⇒ˆ Θ andΘ −→X .
Thus we haveΘ |= ϕsimplies s FS Θ. Using (1) with P|=ϕ
Qgives
PFS Qvia Def. 5. 2
Theorem 4
1. IfP LQthenP SQ.
2. IfP FQthenP FS Q.
Proof: SupposeP FQ. By Lem. 2 we have Q|=ϕ
Q and hence P|=ϕ
Q. Lem. 3 givesP FS Q.
For theLcase, omitref(X)from the definition of a characteristic formula and begin with P |=ϕ
P. The counterpart of Lem. 3 now says that Q |= ϕ
P implies
8. Characteristic tests
Our final step towards Thm. 2 is taken in this section, where we show that every modal formulaϕcan be characterised by a vector-based testTϕsuch that anypCSPprocess satis-fiesϕjust when it passes the testTϕ.
Lemma 4 For everyϕ∈ Fthere exists a pair(Tϕ, vϕ)with TϕanΩ-test andvϕ∈[0,1]Ω, such that
∆|=ϕ ⇔ ∃o∈AΩ(Tϕ,∆) : o≤vϕ (2)
for all∆∈ D(sCSP), and in caseϕ∈ Lwe also have
∆|=ϕ ⇔ ∃o∈AΩ(Tϕ,∆) : o≥vϕ. (3)
Tϕis called acharacteristic testofϕandvϕitstarget value.
Proof: First of all note that if a pair(Tϕ, vϕ)satisfies the requirements above, then any pair obtained from(Tϕ, vϕ) by bijectively renaming the elements of Ω also satisfies these requirements. Hence a characteristic test can always be chosen in such a way that there is a success actionω∈Ω that does not occur in (the finite)Tϕ. Moreover, any count-able collection of characteristic tests can be assumed to be Ω-disjoint, meaning that noω∈Ωoccurs in two different elements of the collection.
The required characteristic tests and target values are ob-tained as follows.
• Letϕ=. TakeTϕ:=ωfor someω∈Ω, andvϕ:=ω. • Letϕ=aψ. By induction,ψhas a characteristic test Tψwith target valuevψ. TakeTϕ :=ω2a.Tψwhere ω∈Ωdoes not occur inTψ, andvϕ:=vψ.
• Let ϕ = ref(X) with X ⊆ Act. Take Tϕ :=
a∈Xa.ωfor someω∈Ω, andvϕ=0.
• Letϕ =i∈IϕiwithIa finite and non-empty index set. Choose aΩ-disjoint family(Ti, vi)i∈I of charac-teristic testsTi with target valuesvi for eachϕi. Fur-thermore, letpi∈(0,1]fori∈I be chosen arbitrarily such thati∈Ipi = 1. Take Tϕ := i∈Ipi·Ti and vϕ:=i∈Ipivi.
• Let ϕ = i∈Ipi·ϕi. Choose a Ω-disjoint family (Ti, vi)i∈I of characteristic testsTi with target values vi for eachϕi, such that there are distinct success ac-tionsωifori∈Ithat do not occur in any of those tests. LetTi:=Ti1
2⊕ωiandv
i:= 12vi+12ωi. Note that for alli∈IalsoTiis a characteristic test ofϕiwith target valuevi. TakeTϕ:=i∈ITiandvϕ:=i∈Ipivi. Note thatvϕ(ω) = 0wheneverω∈Ωdoes not occur inTϕ. By induction onϕwe now check (2) above.
• Letϕ=. For all∆∈ D(sCSP)we have∆|=ϕas well as∃o∈AΩ(Tϕ,∆) : o≤vϕ, using Lem. 1(1).
• Letϕ = aψ witha∈Act. Suppose∆ |=ϕ. Then there is a ∆ with∆ =a⇒ˆ ∆ and∆ |= ψ. By in-duction,∃o∈AΩ(Tψ,∆) : o ≤ vψ. By Lem. 1(2),
o∈AΩ(Tϕ,∆).
Now suppose∃o∈AΩ(Tϕ,∆) : o≤vϕ. This implies
o(ω) = 0, so by Lem. 1(2) there is a∆with∆=⇒ˆa ∆ ando∈AΩ(Tψ,∆). By induction,∆|=ψ, so∆|=ϕ. • Letϕ = ref(X)withX ⊆ Act. Suppose∆ |= ϕ. Then there is a ∆ with∆ =⇒τˆ ∆ and∆−→X . By Lem. 1(3),0∈AΩ(Tϕ,∆).
Now suppose∃o∈AΩ(Tϕ,∆) : o≤vϕ. This implies
o =0, so by Lem. 1(3) there is a∆ with∆ =⇒ˆτ ∆ and∆−→X . Hence∆|=ϕ.
• Letϕ=i∈IϕiwithIa finite and non-empty index set. Suppose∆ |=ϕ. Then∆ |=ϕifor alli∈I, and hence, by induction,∃oi∈AΩ(Ti,∆) : oi≤vi. Thus
o:=i∈Ipioi∈AΩ(Tϕ,∆)by Lem. 1(4), ando≤vϕ. Now suppose∃o∈AΩ(Tϕ,∆) : o≤vϕ. Then, using
Lem. 1(4),o=i∈Ipioi for certainoi∈AΩ(Ti,∆). One has oi≤vi for all i∈I, for if oi(ω) > vi(ω) for some i∈I and ω∈Ω, then ω must occur in Ti and hence cannot occur inTj forj=i. This implies vj(ω) = 0for allj=iand thuso(ω)> vϕ(ω), in con-tradiction with the assumption. By induction,∆|=ϕi for alli∈I, and hence∆|=ϕ.
• Let ϕ = i∈Ipi·ϕi. Suppose ∆ |= ϕ. Then for all i∈I there are ∆i∈ D(sCSP)with ∆i |= ϕi such that ∆ =τ⇒ˆ i∈Ipi·∆i. By induction, there are oi∈AΩ(∆i, Ti) with oi ≤ vi. By Lem. 1(5), o:=i∈Ipioi∈AΩ(Tϕ,∆), ando≤vϕ.
Now suppose ∃o∈AΩ(Tϕ,∆) : o ≤ vϕ. Then, by Lem. 1(5), there areq∈ D(I)and∆i, fori∈I, such that∆ =⇒τˆ i∈Iqi·∆i ando = i∈Iqioi for some oi∈AΩ(∆i, Ti). Now∀i : oi(ωi) = vi(ωi) = 12, so
1
2qi =qioi(ωi) =o(ωi)≤vϕ(ωi) =pivi(ωi) = 12pi. Asi∈Iqi=i∈Ipi= 1, it must be thatqi=pifor all i∈I. Exactly as in the previous case one obtains oi ≤vialli∈I. By induction,∆i |=ϕifor alli∈I, and hence∆|=ϕ.
In caseϕ∈ L, a straightforward induction yields that|vϕ|= 1 and for all ∆∈ D(pCSP) and o∈AΩ(Tϕ,∆) we have |o|= 1. Here|o|denotesω∈Ωo(ω). Therefore,o≤viff
o≥viffo=v, yielding (3). 2
Theorem 5
1. IfP Ωpmay Qthen P
L Q
. 2. IfP ΩpmustQthen P
F Q
.
(P1) Pp⊕P = P (P2) Pp⊕Q = Q1−p⊕P (P3) (Pp⊕Q)q⊕R = Pp·q⊕(Q(1−p)·q
1−p·q ⊕R) (I1) PP = P
(I2) P Q = QP
(I3) (P Q)R = P (QR) (E1) P 20 = P
(E2) P 2Q = Q2P
(E3) (P 2Q)2R = P 2(Q2R) (EI) a.P 2a.Q = a.P a.Q
(D1) P 2(Qp⊕R) = (P 2Q)p⊕(P 2R) (D2) a.P 2(QR) = (a.P 2Q)(a.P 2R) (D3) P 2Q = (P12Q)(P22Q)
(P 2Q1)(P 2Q2),
[image:8.612.312.552.71.237.2]provided P =P1P2, Q=Q1Q2
Figure 2. Common equations
Then Lem. 4 yields∃o∈AΩ(Tϕ, Q). o≤vϕ, and hence, given thatP ΩpmustQandAΩ(Tϕ, R) =A
Ω
(Tϕ, R)for
anyR ∈ pCSP, we have∃o ∈ AΩ(Tϕ, P) : o
≤vϕ. Thus P|=ϕ.
The may-case goes likewise. 2
Combining Thms. 3-5 we obtain Thm. 2, the goal we set ourselves in Sec. 5. Thus, with Thm. 1 and Prop. 2, we have shown that the may preorder coincides with simulation and that the must preorder coincides with failure simulation. 2
9. Equational theories
In order to focus on the essentials we now consider just those processes that do not use the parallel operator|A; we call the resulting sub-languagenCSP. For a discussion of the axiomatisation for terms involving|Aand the other par-allel operators commonly used inCSPsee Sec. 11.
Let us writeP =E Qto denote thatP =Qcan be de-rived using the equations given in Fig. 2. Given the way we defined the syntax ofpCSP, axiom(D1)is merely a case of abbreviation-expansion. Many of the standard equations forCSP[15] are missing; they are not sound forFS, as shown in Sec. 4 of [8]. Typical examples include:
a.(P Q) =a.P a.Q P =P 2P
P2(QR) = (P 2Q)(P2R)
P(Q2R) = (P Q)2(PR)
Proposition 3 SupposeP =E Q. ThenP FS Q.
Proof: Because of Prop. 1 it is sufficient to exhibit witness failure-simulations for axioms in Fig. 2. 2
May:
(May0) a.P2b.Q =a.P b.Q
(May1) P P Q
(May2) 0 P
(May3) a.(Pp⊕Q) a.Pp⊕a.Q
Must:
(Must1) P Q Q
(Must2) Ri∈IPi i∈Iai.Qi,
provided Pi=
j∈Jipj(ai.Qij 2Pij)
[image:8.612.60.291.72.254.2]Qi=j∈JipjQij inits(R)⊆ {ai}i∈I
Figure 3. Inequations
Note that this result also meansP =EQimpliesP SQ. Despite the weakness of this equational theory, it does allow us to reduce terms to a form in which the external choice operator is applied to prefix terms only.
Definition 8 [Normal forms] The set ofnormal formsN is given by the following grammar:
N ::=N1p⊕N2 | N1N2 |
i∈I ai.Ni
Proposition 4 For everyP ∈nCSPthere is a normal form N such thatP =E N.
Proof: A fairly straightforward induction, heavily relying
on(D1)–(D3). 2
10. Inequational theories
In order to characterise the simulation preorders, and the associated testing preorders, we introduceinequations. We writeP Emay QwhenP Qis derivable from the
inequa-tional theory obtained by adding the fourmayinequations in Fig. 3 to the equations in Fig. 2. The first three additions, (May0)–(May2), are used in the standard testing theory ofCSP [15, 6, 14]. For themust case, in addition to the standard inequation(Must1), we require an inequational schema,(Must2); this uses the notationinits(P)to denote the (finite) set of initial visible actions ofP. Formally,
inits(0) = ∅
inits(a.P) = {a}
inits(Pp⊕Q) = inits(P)∪inits(Q)
inits(P 2Q) = inits(P)∪inits(Q)
The side conditions of(Must2)entail that Pi
ai
−→ Qi
and that there exists some∆such thatR =ˆτ⇒∆ −→X with X = Act\{ai}i∈I. Note that(Must2)can be used, to-gether with (I1), to derive the dual of (May3), that is a.Pp⊕ a.Q a.(Pp⊕Q). We writeP Emust Qwhen
P Qis derivable from the resulting inequational theory. An important inequation that follows from(May1)and (P1)is
Pp⊕Q Emay P Q
saying that any probabilistic choice can be simulated by an internal choice. Likewise, we have
P Q Emust Pp⊕Q .
Theorem 6 ForP, QinnCSP, it holds that (i) P S Qif and only ifPEmayQ
(ii) P FS Qif and only ifPEmust Q
Proof: Omitted due to lack of space. 2
11. Conclusions and related work
In this paper we continued our previous work [8, 9] in our quest for a testing theory for processes which exhibit both nondeterministic and probabilistic behaviour. We have studied three different aspects of may- and must testing pre-orders for finite processes: (i) we have shown that the may preorder can be characterised as a co-inductive simulation relation, and the must preorder as a failure simulation rela-tion; (ii) we have given a characterisation of both preorders in a finitary modal logic; and (iii) we have also provided complete axiomatisations for both preorders over a proba-bilistic version of recursion-free CSP. Although we omit-ted our parallel operator|Afrom the axiomatisations, it and similar CSP and CCS-like parallel operators can be handled using standard techniques, in the must case at the expense of introducing auxiliary operators. In future work we hope to extend these results to recursive processes.
We believe these results, in each of the three areas, to be novel, although a number of partial results along similar lines exist in the literature. These are detailed below.
Related work: Early additions of probability to CSP in-clude work by Lowe [23], Seidel [33] and Morgan et al. [27]; but all of them were forced to make compromises of some kind in order to address the potentially complicated interactions between the three forms of choice. The last [27] for example applied the Jones/Plotkin probabilistic power-domain [16] directly to the failures model of CSP [2], the resulting compromise being that probability distributed out-wards through all other operators; one controversial result of that was that internal choice was no longer idempotent, and that it was “clairvoyant” in the sense that it could adapt
to probabilistic-choice outcomes that had not yet occurred. Mislove addressed this problem in [26] by presenting a de-notational model in which internal choice distributed out-wards through probabilistic choice. However, the distribu-tivities of both [27] and [26] constitute identifications that cannot be justified by our testing approach; see [8].
In Jou and Smolka [20], as in [23, 33], probabilistic equivalences based on traces, failures and readies are de-fined. These equivalences are coarser thanpmay. For let
P :=a.((b.d2c.e)1
2⊕(b.f2c.g))
Q:=a.((b.d2c.g)1
2⊕(b.f 2c.e)).
These two processes cannot be distinguished by the equiv-alences of [20, 23, 33]. However, we can tell them apart by the test
T :=a.((b.d.ω1
2⊕c.e.ω)(b.f.ω12⊕c.g.ω))
since A(T, P) = {0,12,1} andA(T, Q) = {12}, that is, P pmayQ.
Probabilistic extensions of testing equivalences [6] have been widely studied. There are two different proposals on how to include probabilistic choice: (i) a test should be non-probabilistic, i.e., there is no occurrence of probabilistic choice in a test [22, 4, 17, 21, 11]; or (ii) a test can be prob-abilistic, i.e., probabilistic choice may occur in tests as well as processes [5, 35, 28, 18, 31, 19, 3]. This paper adopts the second approach.
Some work [22, 4, 5, 28] does not consider nondetermin-ism but deals exclusively withfully probabilisticprocesses. In this setting a process passes a test with a unique proba-bility instead of a set of probabilities, and testing preorders in the style of [6] have been characterised in terms of prob-abilistic traces[5] andprobabilistic acceptance trees[28]. Cazorla et al. [3] extended the results of [28] with nondeter-minism, but suffered from the same problems as [27].
The work most closely related to ours is [18, 19]. In [18] Jonsson and Wang characterised may- and must-testing preorders in terms of “chains” of traces and failures, respec-tively, and in [19] they presented a “substantially improved” characterisation of their may-testing preorder using a notion of simulation which is weaker thanS (cf. Def. 5). They only considered processes withoutτ-moves. In [8] we have shown that tests with internal moves can distinguish more processes than tests without internal moves, even when ap-plied to processes that have no internal moves themselves.
References
[1] E. Bandini & R. Segala (2001): Axiomatizations for prob-abilistic bisimulation. In Proc. ICALP’01, LNCS 2076, Springer, pp. 370–381.
[2] S.D. Brookes, C.A.R. Hoare & A.W. Roscoe (1984): A the-ory of communicating sequential processes. Journal of the ACM 31(3), pp. 560–599.
[3] D. Cazorla, F. Cuartero, V.V. Ruiz, F.L. Pelayo & J.J. Pardo (2003):Algebraic theory of probabilistic and nondeterminis-tic processes. Journal of Logic and Algebraic Programming 55, pp. 57–103.
[4] I. Christoff (1990): Testing equivalences and fully abstract models for probabilistic processes. In Proc.CONCUR’90, LNCS 458, Springer, pp. 126–140.
[5] R. Cleaveland, Z. Dayar, S.A. Smolka & S. Yuen (1999): Testing preorders for probabilistic processes. Information and Computation 154(2), pp. 93–148.
[6] R. De Nicola & M. Hennessy (1984): Testing equivalences for processes.Theoretical Computer Science 34, pp. 83–133.
[7] Y. Deng & C. Palamidessi (2007):Axiomatizations for prob-abilistic finite-state behaviors. Theoretical Computer Sci-ence 373(1-2), pp. 92–114.
[8] Y. Deng, R.J. van Glabbeek, M. Hennessy, C.C. Morgan & C. Zhang (2007): Remarks on testing probabilistic pro-cesses.ENTCS 172, pp. 359–397.
[9] Y. Deng, R.J. van Glabbeek, C.C. Morgan & C. Zhang (2007): Scalar outcomes suffice for finitary probabilistic testing. In Proc.ESOP’07, LNCS 4421, Springer, pp. 363– 368.
[10] R.J. van Glabbeek (1993): The linear time – branching time spectrum II; the semantics of sequential systems with silent moves.In Proc.CONCUR’93, LNCS 715, Springer, pp. 66– 81.
[11] C. Gregorio-Rodr´ıguez & M. N´u˜nez (1999): Denotational semantics for probabilistic refusal testing. ENTCS 22, pp. 111–137.
[12] H. Hansson & B. Jonsson (1990): A calculus for com-municating systems with time and probabilities. In Proc. RTSS’90, IEEE Computer Society Press, pp. 278–287.
[13] He Jifeng, K. Seidel & A.K. McIver (1997): Probabilis-tic models for the guarded command language. Science of Computer Programming 28, pp. 171–192.
[14] M. Hennessy (1988): An Algebraic Theory of Processes. MIT Press.
[15] C.A.R. Hoare (1985):Communicating Sequential Processes. Prentice-Hall.
[16] C. Jones & G.D. Plotkin (1989): A probabilistic powerdo-main of evaluations. In Proc.LICS’89, Computer Society Press, pp. 186–195.
[17] B. Jonsson, C. Ho-Stuart & Wang Yi (1994): Testing and refinement for nondeterministic and probabilistic processes. In Proc.FTRTFT’94, LNCS 863, Springer, pp. 418–430.
[18] B. Jonsson & Wang Yi (1995): Compositional testing pre-orders for probabilistic processes. In Proc.LICS’95, IEEE Computer Society Press, pp. 431–441.
[19] B. Jonsson & Wang Yi (2002): Testing preorders for proba-bilistic processes can be characterized by simulations. The-oretical Computer Science 282(1), pp. 33–51.
[20] C.-C. Jou & S.A. Smolka (1990): Equivalences, congru-ences, and complete axiomatizations for probabilistic pro-cesses. In Proc.CONCUR ’90, LNCS 458, Springer, pp. 367–383.
[21] M.Z. Kwiatkowska & G. Norman (1998): A testing equiva-lence for reactive probabilistic processes.ENTCS 16(2), pp. 114–132.
[22] K.G. Larsen & A. Skou (1991): Bisimulation through prob-abilistic testing.Information and Computation 94(1), pp. 1– 28.
[23] G. Lowe (1993): Representing nondeterminism and prob-abilistic behaviour in reactive processes. Technical Report TR-11-93, Computing laboratory, Oxford University.
[24] N. Lynch, R. Segala & F.W. Vaandrager (2003): Composi-tionality for probabilistic automata. In Proc.CONCUR’03, LNCS 2761, Springer, pp. 204–222.
[25] R. Milner (1989): Communication and Concurrency. Prentice-Hall.
[26] M.W. Mislove (2000): Nondeterminism and probabilistic choice: Obeying the laws. In Proc.CONCUR’00, LNCS 1877, Springer, pp. 350–364.
[27] C.C. Morgan, A.K. McIver, K. Seidel & J.W. Sanders (1996): Refinement oriented probability for CSP. Formal Aspects of Computing 8, pp. 617–647.
[28] M. N´u˜nez (2003): Algebraic theory of probabilistic pro-cesses.Journal of Logic and Algebraic Programming 56, pp. 117–177.
[29] E.-R. Olderog & C.A.R. Hoare (1986): Specification-oriented semantics for communicating processes. Acta In-formatica 23, pp. 9–66.
[30] R. Segala (1995): Modeling and Verification of Randomized Distributed Real-Time Systems. PhD thesis, MIT.
[31] R. Segala (1996): Testing probabilistic automata. In Proc. CONCUR’96, LNCS 1119, Springer, pp. 299–314.
[32] R. Segala & N.A. Lynch (1994): Probabilistic simulations for probabilistic processes. In Proc.CONCUR’94, LNCS 836, Springer, pp. 481–496.
[33] K. Seidel (1995): Probabilistic communicating processes. Theoretical Computer Science 152(2), pp. 219–249.
[34] R. Tix, K. Keimel & G.D. Plotkin (2005): Semantic domains for combining probability and non-determinism. ENTCS 129, pp. 1–104.