Research Article
Nonlinear Backstepping Control Design for Coupled Nonlinear
Systems under External Disturbances
Wonhee Kim ,
1Chang Mook Kang ,
2Young Seop Son,
3and Chung Choo Chung
4 1School of Energy Systems Engineering, Chung-Ang University, Seoul 06974, Republic of Korea2Agency for Defense Development, Daejeon, Republic of Korea
3Global R&D Center, CAMMSYS Corporation, Incheon 406-840, Republic of Korea
4Division of Electrical and Biomedical Engineering, Hanyang University, Seoul 133-791, Republic of Korea Correspondence should be addressed to Chang Mook Kang; [email protected]
Received 25 October 2018; Revised 3 January 2019; Accepted 17 January 2019; Published 7 February 2019 Academic Editor: Eric Campos-Canton
Copyright © 2019 Wonhee Kim et al. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. A nonlinear backstepping control is proposed for the coupled normal form of nonlinear systems. The proposed method is designed by combining the sliding-mode control and backstepping control with a disturbance observer (DOB). The key idea behind the proposed method is that the linear terms of state variables of the second subsystem are lumped into the virtual input in the first subsystem. A DOB is developed to estimate the external disturbances. Auxiliary state variables are used to avoid amplification of the measurement noise in the DOB. For output tracking and unmatched disturbance cancellation in the first subsystem, the desired virtual input is derived via the backstepping procedure. The actual input in the second subsystem is developed to guarantee the convergence of the virtual input to the desired virtual input by using a sliding-mode control. The stability of the closed-loop is verified by using the input-to-state stable (ISS) property. The performance of the proposed method is validated via numerical simulations and an application to a vehicle system based on CarSim platform.
1. Introduction
Control for nonlinear systems has attracted considerable attention, and, therefore, various control methods have been investigated for nonlinear systems. Control methods using the Lyapunov function were proposed for nonlinear systems [1–4]. Input-output linearization and feedback linearization were proposed to transform nonlinear systems to the normal form and to control the nonlinear systems [5, 6]. Sliding-mode control techniques were developed for nonlinear sys-tems owing to the decoupling and invariance properties [7, 8]. Control algorithms based on the singular perturbation theory were developed for nonlinear systems involving fast and slow dynamics [9, 10]. Backstepping method is one of the breakthroughs for the control of nonlinear systems. This method is a recursive procedure using a Lyapunov function and a systematic design approach for special forms of the nonlinear systems (the strict feedback form or the normal form or both) [11]. It can guarantee global stability and improvement of tracking and transient performances. In the
past decades, various backstepping methods were widely used to solve the control problems of nonlinear systems. A backstepping control method was developed to improve the force control performance for an electro-hydraulic actuator [12]. An adaptive control technique was implemented to the backstepping controller for unknown disturbance or param-eters [13]. An adaptive backstepping sliding-mode controller was designed to improve the tracking performance in the sliding and presliding phases [14]. In [15], an output feedback nonlinear control was proposed for a hydraulic system with mismatched modeling uncertainties; in this control, an extended state observer (ESO) and a nonlinear robust controller are synthesized via the backstepping method. A recurrent fuzzy neural network backstepping control was proposed for the prescribed output tracking performance of nonlinear dynamic systems [16]. An adaptive robust control using ESO was developed for the DC motor control [17]. An ESO-based backstepping was proposed to improve the output-tracking performance with external disturbance using only output feedback [18]. Active disturbance rejection
Volume 2019, Article ID 7941302, 13 pages https://doi.org/10.1155/2019/7941302
adaptive control schemes were proposed for both parametric uncertainties and uncertain nonlinearities of the nonlinear systems [19, 20]. An observer-based backstepping control method using reduced lateral dynamics was developed for autonomous lane-keeping system [21].
Let us consider a class of nonlinear systems coupled with two normal form subsystems as follows:
̇𝑥 1= 𝑥2 ... ̇𝑥 𝑟−1= 𝑥𝑟 ̇𝑥 𝑟 = 𝑓𝑟(𝑥𝑎) + 𝑛 ∑ 𝑖=𝑟+1 𝑎𝑖𝑥𝑖+ 𝑑1 ̇𝑥 𝑟+1= 𝑥𝑟+2 ... ̇𝑥 𝑛−1= 𝑥𝑛 ̇𝑥 𝑛= 𝑓𝑛(𝑥) + 𝑔 (𝑥) 𝑢 + 𝑑2 𝑦 = 𝑥1 (1) where 𝑥 = [𝑥1, 𝑥2, . . . , 𝑥𝑛]𝑇 = [𝑥𝑎, 𝑥𝑏]𝑇 ∈ R𝑛 is the state variable vector, 𝑥𝑎 = [𝑥1, 𝑥2, . . . , 𝑥𝑟]𝑇 ∈ R𝑟, 𝑥𝑏 =
[𝑥𝑟+1, 𝑥𝑟+2, . . . , 𝑥𝑛]𝑇∈R𝑛−𝑟,𝑦 = 𝑥
1denotes the output,𝑎𝑛is
nonzero constant, the input function𝑔(𝑥)is always positive or negative for all𝑥(𝑡), and𝑑1(𝑡)and𝑑2(𝑡)are disturbances. In this paper, this class of systems (1) is called the coupled normal form in nonlinear systems. This nonlinear system (1) is not in the general normal form because 𝑥𝑟+1 cannot be regarded as the virtual input in𝑥𝑟 dynamics. Furthermore, the disturbance𝑑1 is in𝑥𝑟 dynamics. Thus, previous back-stepping control methods cannot be used directly for tracking control of these systems. Several methods were presented to solve the control problem of nonlinear systems [22, 23]. In [22], two nonlinear control techniques using backstepping and sliding mode techniques were applied to an autonomous microhelicopter. Recently, a robust nonlinear control was developed for the synchronization control of cross-strict feedback hyperchaotic systems [23]. Unfortunately, because systems in [22, 23] have multi-inputs, these techniques cannot solve the control problems for the coupled normal form in a nonlinear system (1).
In this paper, we propose a nonlinear backstepping control for the coupled normal form of nonlinear systems. The proposed method combines a sliding mode technique and backstepping control with the disturbance observer (DOB). The key idea of the proposed method is that the terms ∑𝑛𝑖=𝑟+1𝑎𝑖𝑥𝑖 are lumped into the virtual input in the first subsystem. A DOB is developed to estimate the external disturbances. Auxiliary state variables are used to avoid amplification of the measurement noise in the DOB. For output tracking and unmatched disturbance cancellation in the first subsystem, the desired virtual input is derived via
the backstepping procedure. The actual input in the second subsystem is developed to guarantee the convergence of the virtual input to the desired virtual input by using a super twisting algorithm (STA). The stability of the closed-loop is proven by using the input-to-state stable (ISS) property. The performance of the proposed method is validated via numerical simulations and an application to a vehicle system based on CarSim platform.
2. Disturbance Observer Design
In this paper, we describe the situation that satisfies the following Assumptions 1 and 2.
Assumption 1. 𝑑1,𝑑2and their derivatives are also bounded. In general, prior information about the derivative of the disturbances is unknown but bounded, at least locally [24]. The unknown constants𝑑1̇maxand𝑑2̇maxexist such that
𝑑1̇ ≤𝑑1̇max
𝑑2̇ ≤𝑑2̇max.
(2)
Assumption 2. The polynomial𝑎𝑛𝑠𝑛−𝑟−1+𝑎𝑛−1𝑠𝑛−𝑟−2+. . .+𝑎𝑟+1 is Hurwitz.
Most real systems that are in the form of (1) satisfy Assumption 2. For example, the lateral dynamics of a vehicle with differential braking force input satisfy Assumption 2 [25]. Thus, this assumption is not strict for actual physical systems.
From (1), the disturbances,𝑑1and𝑑2, can be rewritten as
𝑑1= ̇𝑥𝑟− 𝑓𝑟(𝑥𝑎) − ∑𝑛
𝑖=𝑟+1
𝑎𝑖𝑥𝑖
𝑑2= ̇𝑥𝑛− 𝑓𝑛(𝑥) − 𝑔 (𝑥) 𝑢.
(3)
We define the estimations of the disturbances,𝑑̂1and𝑑̂2. The dynamics of𝑑̂1and𝑑̂2are designed as
̇̂𝑑1= 1 𝜀1( ̇𝑥𝑟− 𝑓𝑟(𝑥𝑎) − 𝑛 ∑ 𝑖=𝑟+1 𝑎𝑖𝑥𝑖− ̂𝑑1) ̇̂𝑑2= 𝜀1 2( ̇𝑥𝑛− 𝑓𝑛(𝑥) − 𝑔 (𝑥) 𝑢 − ̂𝑑2) (4)
where1/𝜀2 and1/𝜀3 are the observer gains. The estimation errors are defined as
̃
𝑑1= 𝑑1− ̂𝑑1 ̃
From, (3), (4), and (5), the estimation error dynamics can be derived as ̇̃𝑑1= ̇𝑑1− ̇̂𝑑1 = ̇𝑑1−𝜀1 1( ̇𝑥𝑟− 𝑓𝑟(𝑥𝑎) − 𝑛 ∑ 𝑖=𝑟+1𝑎𝑖𝑥𝑖− ̂𝑑1) = ̇𝑑1−𝜀1 1(𝑑1− ̂𝑑1) = − 1 𝜀1𝑑̃1+ ̇𝑑1 ̇̃𝑑2= ̇𝑑2− ̇̂𝑑2= ̇𝑑2−𝜀1 2( ̇𝑥𝑛− 𝑓𝑛(𝑥) − 𝑔 (𝑥) 𝑢 − ̂𝑑2) = ̇𝑑2− 1 𝜀2(𝑑2− ̂𝑑2) = − 1 𝜀2𝑑̃2+ ̇𝑑2. (6)
To suppress the bounded derivatives of the disturbances, the high gains, i.e., the low values of 𝜀1 and 𝜀2, are required. In practice, measurement noises do appear in sensors. The dynamics of 𝑑̂1 and 𝑑̂2 (4) employ the derivative of the state. If high observer gains are used, the noise is amplified by the high gains. Thus, the observer is not practical for implementation. To avoid the use of the derivative of the state, we use the auxiliary state variables,𝜉1,𝜉2.
Theorem 3. With Assumption 1, given the auxiliary state
variables,𝜉1,𝜉2such as 𝜉1= ̂𝑑1−𝑥𝑟 𝜀1 𝜉2= ̂𝑑2−𝑥𝑛 𝜀2 (7)
the dynamics of the auxiliary state variables are
̇𝜉 1= −𝜀1 1(𝜉1+ 𝑥𝑟 𝜀1) + 1 𝜀1(−𝑓𝑟(𝑥𝑎) − 𝑛 ∑ 𝑖=𝑟+1 𝑎𝑖𝑥𝑖) ̇𝜉 2= −𝜀1 2(𝜉2+ 𝑥𝑛 𝜀2) + 1 𝜀2(−𝑓𝑛(𝑥) − 𝑔 (𝑥) 𝑢) . (8)
Then,| ̃𝑑𝑖(𝑡)| ≤exp(−(1/2𝜀𝑖)𝑡)| ̃𝑑𝑖(0)| + 2𝜀𝑖𝑑𝑖̇max for𝑖 ∈ [1, 2]. Proof. Differentiating the auxiliary state variables with respect to time gives
̇𝜉
𝑖= ̇̂𝑑𝑖−
̇𝑥
𝑗
𝜀𝑖 (9)
for𝑖 ∈ [1, 2]and𝑗 ∈ {𝑟, 𝑛}. From (1), (5), (7), and (8), the
disturbance estimation error dynamics are obtained as
̇̃𝑑𝑖= −𝜀1
𝑖
̃
𝑑𝑖+ ̇𝑑𝑖. (10)
In (10), the dynamics of𝑑̃2𝑖 are
𝑑 𝑑𝑡( ̃ 𝑑2 𝑖 2 ) = − 1 𝜀𝑖𝑑̃2𝑖 + ̃𝑑 ̇𝑑𝑖 ≤ − 1 2𝜀𝑖𝑑̃2𝑖 −2𝜀1 𝑖 ̃ 𝑑𝑖 (𝑑̃𝑖 − 2𝜀𝑖𝑑𝑖̇) (11)
The following result is thus derived from (11), using Lemma 6.20 and Theorem C.2 in [11]: 𝑑̃𝑖(𝑡) ≤exp(−2𝜀1 𝑖𝑡) ̃𝑑𝑖(0) + 2𝜀𝑖0≤𝜏≤𝑡sup ̇ 𝑑𝑖(𝜏) ≤exp(− 1 2𝜀𝑖𝑡) ̃𝑑𝑖(0) + 2𝜀𝑖𝑑𝑖̇max. (12)
The upper bound of| ̃𝑑𝑖(∞)|thus decreases as𝜀𝑖gets smaller.
Remark 4. The proposed DOB (8) with the auxiliary state variable (7) does not require the derivatives of states, i.e., ̇𝑥𝑟 and ̇𝑥𝑛, to obtain𝑑1̇ and𝑑2̇. Thus, if (7) and (8) are used to estimate the disturbances instead of (4), amplification of the measurement noise by the high gain can be reduced, such that it is negligible in practice.
3. Sliding Mode Backstepping
Controller Design
In this paper, the control goal is to determine𝑢that makes the output𝑦 = 𝑥1track the desired reference trajectory𝑦𝑑= 𝑥1𝑑, which is assumed to have continuous derivatives up to the𝑛th order. The tracking error𝑒𝑖𝑖 ∈ [1, 𝑟]is defined as
𝑒1= 𝑥1− 𝑦𝑑 𝑒2= ̇𝑥1− ̇𝑦𝑑 𝑒3= ̈𝑥1− ̈𝑦𝑑 ... 𝑒𝑟= 𝑥(𝑟−1)1 − 𝑦𝑑(𝑟−1). (13)
To eliminate the steady-state error, the integral error 𝑒0 is defined as
𝑒0= ∫𝑡
0𝑒1(𝜏) 𝑑𝜏. (14)
The error dynamics from𝑒1to𝑒𝑟can be written as
̇𝑒 0= 𝑒1 ̇𝑒 1= 𝑒2 ... ̇𝑒 𝑟−1= 𝑒𝑟 ̇𝑒 𝑟= 𝑓𝑟(𝑥𝑎) + 𝑛 ∑ 𝑖=𝑟+1 𝑎𝑖𝑥𝑖+ 𝑑1− 𝑦(𝑟)𝑑 . (15)
The linear combination of the tracking errors,𝑠1, is designed in terms of the error
𝑠1= 𝑒𝑟+𝑟−1∑
𝑖=0
where the coefficients𝜎0, . . . , 𝜎𝑟−1 are chosen such that the polynomial𝑠𝑟+ 𝜎𝑟−1𝑠𝑟−1+ ⋅ ⋅ ⋅ + 𝜎0is Hurwitz. From (15) and (16), we obtain 1̇𝑠 as ̇𝑠 1= 𝑓𝑟(𝑥𝑎) + 𝑛 ∑ 𝑖=𝑟+1𝑎𝑖𝑥𝑖+ 𝑑1− 𝑦 (𝑟) 𝑑 + 𝑟−1 ∑ 𝑖=0𝜎𝑖𝑒𝑖+1. (17) We define the terms,∑𝑛𝑖=𝑟+1𝑎𝑖𝑥𝑖, as the virtual input of the first subsystem in (1):
𝑠2= ∑𝑛
𝑖=𝑟+1
𝑎𝑖𝑥𝑖. (18)
Equation (17) then becomes
̇𝑠 1= 𝑓𝑟(𝑥𝑎) + 𝑑1− 𝑦𝑑(𝑟)+ 𝑟−1 ∑ 𝑖=0 𝜎𝑖𝑒𝑖+1+ 𝑠2𝑑+ 𝑧2 (19)
where𝑠2𝑑is the desired virtual input and the sliding surface
𝑧2= 𝑠2− 𝑠2𝑑. The desired virtual input,𝑠2𝑑, is designed as
𝑠2𝑑= −𝑓𝑟(𝑥𝑎) − 𝑑1+ 𝑦(𝑟)𝑑 − 𝑟−1
∑
𝑖=0
𝜎𝑖𝑒𝑖+1− 𝑘𝑠1𝑠1 (20)
where𝑘𝑠1is positive and constant. The derivative of𝑧2with respect to time is ̇𝑧 2= ̇𝑠2− ̇𝑠2𝑑= 𝑛−1 ∑ 𝑖=𝑟+1 𝑎𝑖𝑥𝑖+1+ 𝑎𝑛 ̇𝑥𝑛− ̇𝑠2𝑑 = 𝑛−1∑ 𝑖=𝑟+1 𝑎𝑖𝑥𝑖+1+ 𝑎𝑛(𝑓𝑛(𝑥) + 𝑔 (𝑥) 𝑢 + 𝑑2) − ̇𝑠2𝑑. (21)
The input is designed using STA as
𝑢 = − 1 𝑎𝑛𝑔 (𝑥)( 𝑛−1 ∑ 𝑖=𝑟+1 𝑎𝑖𝑥𝑖+1− ̇𝑠2𝑑+ 𝜙1(𝑧2) − 𝜙2(𝑧2)) − 1 𝑔 (𝑥)(𝑓𝑛(𝑥) + 𝑑2) (22) where 𝜙1(𝑧2) = 𝑘𝑧1|𝑧2|1/2sgn(𝑧2), 2̇𝜙(𝑧2) = −𝑘𝑧2sgn(𝑧2), and𝑘𝑧1and𝑘𝑧2are positive constants. In order to avoid the chattering problem, STA [26, 27] is applied to the controller (22).
Theorem 5. With Assumption 2, suppose that the control law,
(20) and (22), is applied to system (1). Then the output tracking error𝑒1converges to zero and𝑥𝑏is ultimately bounded. Proof.
Step 1. From (19) and (20), we have
̇𝑠
1= −𝑘𝑠1𝑠1+ 𝑧2. (23)
By defining the positive-definite Lyapunov function𝑉1as
𝑉1= 1
2𝑠21 (24)
we obtain
̇𝑉
1= −𝑘𝑠1𝑠21+ 𝑧2𝑠1. (25)
Using𝑧2as the input and𝑠1as the output in (23) gives
𝑧2 ⏟⏟⏟⏟⏟⏟⏟ 𝑖𝑛𝑝𝑢𝑡 𝑠1 ⏟⏟⏟⏟⏟⏟⏟ 𝑜𝑢𝑡𝑝𝑢𝑡 = ̇𝑉1+ 𝑘⏟⏟⏟⏟⏟⏟⏟𝑠1𝑠21 ≥0 . (26)
Then (26) shows that the relationship between 𝑠1 and 𝑧2 is strictly output passive [9] and 1̇𝑠 = −𝑘𝑠1𝑠1 is zero-state observable. Therefore,𝑠1system is ISS. With control law (22), the dynamics of𝑧2and𝜙2become
̇𝑧
2= −𝑘𝑧1𝑧21/2sgn(𝑧2) + 𝜙2
̇𝜙
2= −𝑘𝑧2sgn(𝑧2) .
(27)
We define the vector𝜁 = [𝜁1 𝜁2]𝑇 = [|𝑧2|1/2sgn(𝑧2), 𝜙2]𝑇. The derivative of𝜁with respect to time is
̇𝜁 = 1𝜁 1𝐴𝜁𝜁 (28) where 𝐴𝜁= [ [ −12𝑘𝑧1 12 −𝑘𝑧2 0]] (29)
and|𝜁1| = |𝑧2|1/2. Because𝑘𝑧1 > 0and𝑘𝑧2> 0,𝐴𝜁is Hurwitz. We define the Lyapunov candidate function𝑉𝜁as
𝑉𝜁= 𝜁𝑇𝑃𝜁𝜁 (30)
where𝑃𝜁is positive definite. The derivative of𝜁with respect to time is given by ̇𝑉 𝜁= −𝜁1 1𝜁 𝑇𝑄 𝜁𝜁 (31)
where𝑄𝜁is positive definite such that𝐴𝑇𝜁𝑃𝜁+ 𝑃𝜁𝐴𝜁 = −𝑄𝜁. From [27], the origin𝜁 = 0is finite-time stable. Consequently
𝑧2is equal to zero, identically, after a finite time interval. Step 2. With𝑧2= 0,
̇𝑠
1= −𝑘𝑠1𝑠1. (32)
Then, (16) can be rewritten as
̇𝑒 0= 𝑒1 ... ̇𝑒 𝑟−1= 𝑒𝑟 𝑒𝑟= −𝑟−1∑ 𝑖=0 𝜎𝑖𝑒𝑖+ 𝑠1. (33)
Equation (33) is simplified as ̇𝑒 𝑎= 𝐴𝑎𝑒𝑎+ 𝐵𝑎𝑠1 (34) where𝑒𝑎= [𝑒0, 𝑒1, . . . , 𝑒𝑟−1]𝑇∈R𝑟, 𝐴𝑎= [ [ [ [ [ [ [ [ [ [ [ [ [ 0 1 0 ⋅ ⋅ ⋅ 0 0 0 0 1 ⋅ ⋅ ⋅ 0 0 0 0 0 ⋅ ⋅ ⋅ 0 0 ... ... ... d ... ... 0 0 0 ⋅ ⋅ ⋅ 0 1 −𝜎0 −𝜎1 −𝜎2 ⋅ ⋅ ⋅ −𝜎𝑟−2 −𝜎𝑟−1 ] ] ] ] ] ] ] ] ] ] ] ] ] , 𝐵𝑎= [0, 0, . . . , 0, 1]𝑇. (35)
Because𝐴𝑎is Hurwitz,𝑒𝑎is bounded-input bounded output (BIBO) stable. With the convergence of𝑠1to zero,𝑒0,𝑒1,. . .,
𝑒𝑟−1converge to zeros. Consequently,𝑒𝑟= −𝜎0𝑒0−𝜎1𝑒1−⋅ ⋅ ⋅−
𝜎𝑟−1𝑒𝑟−1also converges to zero. Step 3. With𝑧2= 0,
𝑠2= 𝑠2𝑑. (36)
Because 𝑒0, 𝑒1, . . ., 𝑒𝑟−1 converge to zeros and 𝑦𝑑 has continuous derivatives up to the𝑛th order,𝜉 = −𝑓𝑟(𝑥𝑎) +
𝑦𝑑(𝑟)− 𝑑1− ∑𝑟−1𝑖=1 𝜎𝑖𝑒𝑖+1 is bounded. Thus, a positive constant
𝜉maxexists such that𝜉max=sup𝑡𝜉(𝑡). From (1), (18), and (36), we obtain ̇𝑥 𝑟+1= 𝑥𝑟+2 ... ̇𝑥 𝑛−1= 𝑥𝑛 𝑎𝑛𝑥𝑛= −𝑛−1∑ 𝑖=𝑟+1 𝑎𝑖𝑥𝑖+ 𝜉. (37) Equation (37) is simplified as ̇𝑥 𝑏𝑧 = 𝐴𝑏𝑥𝑏𝑧+ 𝐵𝑏𝜉 (38) where𝑥𝑏𝑧= [𝑥𝑟+1, 𝑥𝑟+2, . . . , 𝑥𝑛−1]𝑇∈R𝑛−𝑟−1, 𝐴𝑏= [ [ [ [ [ [ [ [ [ [ [ [ [ [ [ 0 1 0 ⋅ ⋅ ⋅ 0 0 0 0 1 ⋅ ⋅ ⋅ 0 0 0 0 0 ⋅ ⋅ ⋅ 0 0 ... ... ... d ... ... 0 0 0 ⋅ ⋅ ⋅ 0 1 −𝑎𝑟+1 𝑎𝑛 − 𝑎𝑟+2 𝑎𝑛 − 𝑎𝑟+3 𝑎𝑛 ⋅ ⋅ ⋅ − 𝑎𝑛−2 𝑎𝑛 − 𝑎𝑛−1 𝑎𝑛 ] ] ] ] ] ] ] ] ] ] ] ] ] ] ] , 𝐵𝑏= [0, 0, . . . , 0, 1 𝑎𝑛] 𝑇 . (39)
We define the positive-definite Lyapunov function𝑉𝑏as
𝑉𝑏= 𝑥𝑇𝑏𝑧𝑃𝑏𝑥𝑏𝑧. (40)
Because𝐴𝑏 is Hurwitz, a positive definite matrix 𝑃𝑏 exists such that 𝐴𝑇𝑏𝑃𝑏+ 𝑃𝑏𝐴𝑏= −𝐼. (41) The derivative of𝑉𝑏is ̇𝑉 𝑏≤ −𝑥𝑇𝑏𝑧𝑥𝑏𝑧+ 2𝑥 𝑇 𝑏𝑧𝑃𝑏𝐵𝑏𝜉max ≤ − 𝑥𝑏𝑧 2 2+ 2𝜆max(𝑃𝑏) 𝜉max 𝑎𝑛 𝑥𝑏𝑧2 ≤ − (1 − 𝜃1) 𝑥𝑏𝑧22− 𝜃1𝑥𝑏𝑧22 +2𝜆max(𝑃𝑎𝑏) 𝜉max 𝑛 𝑥𝑏𝑧2 (42)
where0 < 𝜃1< 1, and𝜆min(𝐴)and𝜆max(𝐴)are the minimum and maximum eigenvalues of the matrix 𝐴, respectively. Then,
̇𝑉
𝑏≤ − (1 − 𝜃1) 𝑥𝑏𝑧
2
2 (43)
for all‖𝑥𝑏𝑧‖2 ≤ 𝜇1 where𝜇1 = 2𝜆max(𝑃𝑏)𝜉max/𝜃1𝑎𝑛. There exists𝑇1such that
𝑥𝑏𝑧2≤
𝜆max(𝑃𝑏)
𝜆min(𝑃𝑏)𝜇1 (44)
for all𝑡 ≥ 𝑇1. Consequently,𝑥𝑏 is also ultimately bounded with the ultimate bound of𝑥𝑏𝑧.
Remark 6. Owing to𝜉in (38), only the boundedness of𝑥𝑏is guaranteed. Furthermore, the convergence rate of𝑥𝑏is fixed by the system parameters. Only the convergence of𝑧2to𝑧2𝑑 is sufficient to make 𝑒1 converge to zero, regardless of the convergence rate of𝑥𝑏.
Remark 7. When𝑒𝑎converges to zero and𝑦𝑑(∞)and𝑑are zero,𝜉maxbecomes zero. Consequently,𝑥𝑏also converges to zero.
Remark 8. In [22, 23], the coupled systems with multi-inputs were dealt; these techniques cannot solve the control problems for the coupled nonlinear system with single input (1). On the other hand, the proposed method (20) and (22) can solve the tracking control problems for the coupled nonlinear system with one input (1).
4. Closed-Loop Stability Analysis
Actually, controller (20) and (22) uses the estimated distur-bances𝑑̂1and𝑑̂2instead of the disturbances𝑑1and𝑑2. The controller becomes 𝑠2𝑑= −𝑓𝑟(𝑥𝑎) + 𝑦𝑑(𝑟)− ̂𝑑1−𝑟−1∑ 𝑖=0 𝜎𝑖𝑒𝑖+1− 𝑘𝑠1𝑠1 𝑢 = − 1 𝑎𝑛𝑔 (𝑥)( 𝑛−1 ∑ 𝑖=𝑟+1 𝑎𝑖𝑥𝑖+1− ̇𝑠2𝑑+ 𝜙1(𝑧2) − 𝜙2(𝑧2)) − 1 𝑔 (𝑥)(𝑓𝑛(𝑥) + ̂𝑑2) (45) where 𝜙1(𝑧2) = 𝑘𝑧1|𝑧2|1/2sgn(𝑧2), 2̇𝜙(𝑧2) = −𝑘𝑧2sgn(𝑧2), and𝑘𝑠1,𝑘𝑧1, and𝑘𝑧2are positive constants. The closed-loop system including controller (45) and observer (4) is given as follows: ̇𝑠 1= −𝑘𝑠1𝑠1+ 𝑧2+ ̃𝑑1 ̇𝑧 2= −𝑘𝑧1𝑧21/2sgn(𝑧2) + 𝜙2+ ̃𝑑2 ̇𝜙 2= −𝑘𝑧2sgn(𝑧2) ̇̃𝑑1= −𝜀1 1 ̃ 𝑑1+ ̇𝑑1 ̇̃𝑑2= −1 𝜀2𝑑̃2+ ̇𝑑2 (46)
Theorem 9. With Assumptions 1 and 2, suppose that controller
(45) and disturbance observer (7) and (8) are used in (1). Further,𝜇𝑧2and𝑇𝑧2exist such that
𝑧2 ≤ 𝜇𝑧2 (47)
for all𝑡 ≥ 𝑇𝑧2. The overall tracking error system (46) is the serial interconnected system of the ISS system. As𝑡 → ∞,
𝑠1(𝑡) ≤ 𝑠1max 𝑑̃1(𝑡) ≤ 2𝜀1𝑑1̇max 𝑑̃2(𝑡) ≤ 2𝜀2𝑑2̇max (48)
where𝑠1max = (2/𝑘𝑠1)(𝜇𝑧2+ 2𝜀1𝑑1̇max). Consequently,𝑒𝑎and𝑥𝑏 are ultimately bounded.
Proof.
Step 1. In (46), the dynamics of𝑧2and𝜙2are
̇𝑧
2= −𝑘𝑧1𝑧21/2sgn(𝑧2) + 𝜙2+ ̃𝑑2
̇𝜙
2= −𝑘𝑧2sgn(𝑧2) .
(49) We define the vector𝜁 = [𝜁1 𝜁2]𝑇 = [|𝑧2|1/2sgn(𝑧2), 𝜙2]𝑇. The derivative of𝜁with respect to time is
̇𝜁 = 1𝜁 1𝐴𝜁𝜁 (50) where 𝐴𝜁= [ [ −1 2𝑘𝑧1 1 2 −𝑘𝑧2 0]] (51)
and|𝜁1| = |𝑧2|1/2. Because𝑘𝑧1 > 0and𝑘𝑧2> 0,𝐴𝜁is Hurwitz. We define the Lyapunov candidate function𝑉𝜁as
𝑉𝜁= 𝜁𝑇𝑃𝜁𝜁 (52)
where𝑃𝜁is positive definite. The derivative of𝜁with respect to time is given by ̇𝑉 𝜁= −𝜁1 1𝜁 𝑇𝑄 𝜁𝜁 + 1 𝜁11/2 [ ̃𝑑2 0] 𝑃𝜁𝜁 (53)
where𝑄𝜁is positive definite such that𝐴𝑇𝜁𝑃𝜁+ 𝑃𝜁𝐴𝜁 = −𝑄𝜁. From (10) and the definition of𝑉𝑑̃2= ̃𝑑22, 𝑑̇𝑉̃2is given by
̇𝑉̃ 𝑑2= − 1 𝜀2𝑑̃22+ ̇𝑑2𝑑̃2= −𝜀1 2 ̃ 𝑑22+ ̇𝑑2max𝑑̃2 = − (1 𝜀2 − 𝜃𝑑̃2) ̃𝑑2 2 − 𝜃𝑑̃2𝑑̃22+ ̇𝑑2max𝑑̃2 (54) where0 < 𝜃𝑑̃2< 1. Then, ̇𝑉̃ 𝑑2≤ − ( 1 𝜀2 − 𝜃𝑑̃2) ̃𝑑2 2 (55) for all| ̃𝑑2| ≥ 𝜇𝑑̃2where𝜇𝑑̃2= ̇𝑑2max/𝜃𝑑̃2. There exists𝑇𝑑̃2such
that
𝑑̃2 ≤ 𝜇𝑑̃2 (56)
for all𝑡 ≥ 𝑇𝑑̃2When𝑡 ≥ 𝑇𝑑̃2, (53) becomes
̇𝑉 𝜁≤ −𝜁1 1 (𝜁 𝑇𝑄 𝜁𝜁 + 𝜇𝑑̃2𝜆 (𝑃𝜁) 𝜁2) ≤ 𝜁1 1 (−(𝜆min(𝑄𝜁) − 𝜃𝜁) 𝜁 2− 𝜃 𝜁𝜁2 + 𝜇𝑑̃2𝜆 (𝑃𝜁) 𝜁2) (57) where0 < 𝜃𝜁< 1. Then, ̇𝑉 𝜁≤𝜁1 1 (−(𝜆min(𝑄𝜁) − 𝜃𝜁) 𝜁 2) (58) for all‖𝜁‖2≥ 𝜇𝜁where𝜇𝜁= 𝜇𝑑̃2𝜆(𝑃𝜁)/𝜃𝜁. There exists𝑇𝜁such
that
𝜁2≤
𝜆max(𝑃𝜁)
𝜆min(𝑃𝜁)𝜇𝜁 (59)
for all𝑡 ≥ 𝑇𝜁. Consequently,𝜇𝑧2and𝑇𝑧2exist such that
for all𝑡 ≥ 𝑇𝑧2. In (46),𝑠1dynamics can be obtained as
̇𝑠
1= −𝑘𝑠1𝑠1+ 𝑧2+ ̃𝑑1. (61)
Then we obtain the dynamics of𝑠21as
𝑑 𝑑𝑡( 𝑠2 1 2) = −𝑘𝑠1𝑠21+ 𝑠1(𝑧2+ ̃𝑑1) ≤ −𝑘2𝑠1𝑠21 −𝑘𝑠1 2 𝑠1(𝑠1 − 2𝑘𝑠1(𝑧2 + ̃𝑑1)) . (62)
From (62), the following result is derived using Lemma 6.20 and Theorem C.2 in [11]: 𝑠1(𝑡) ≤exp(−𝑘2𝑠1𝑡) 𝑠1(0) + 2 𝑘𝑠10≤𝜏≤𝑡sup(𝑧2(𝜏) + ̃ 𝑑1(𝜏)) . (63)
Equation (63) shows that the relationship between𝑧2and𝑑̃1, and𝑒𝑖+1has ISS property. The overall tracking error system (46) is the serial interconnected system of the ISS system. As
𝑡 → ∞, 𝑠1(𝑡) ≤ 𝑠1max 𝑑̃1(𝑡) ≤ 2𝜀1𝑑1̇max 𝑑̃2(𝑡) ≤ 2𝜀2𝑑2̇max (64)
where𝑠1max = (2/𝑘𝑠1)(𝜇𝑧2+ 2𝜀1𝑑1̇max). Step 2. Equation (16) can be rewritten as
̇𝑒 0= 𝑒1 ... ̇𝑒 𝑟−1= 𝑒𝑟 𝑒𝑟= −𝑟−1∑ 𝑖=0 𝜎𝑖𝑒𝑖+ 𝑠1. (65) Equation (65) is simplified as ̇𝑒 𝑎= 𝐴𝑎𝑒𝑎+ 𝐵𝑎𝑠1 (66) where𝑒𝑎= [𝑒0, 𝑒1, . . . , 𝑒𝑟−1]𝑇∈R𝑟, 𝐴𝑎= [ [ [ [ [ [ [ [ [ [ [ [ [ 0 1 0 ⋅ ⋅ ⋅ 0 0 0 0 1 ⋅ ⋅ ⋅ 0 0 0 0 0 ⋅ ⋅ ⋅ 0 0 ... ... ... d ... ... 0 0 0 ⋅ ⋅ ⋅ 0 1 −𝜎0 −𝜎1 −𝜎2 ⋅ ⋅ ⋅ −𝜎𝑟−2 −𝜎𝑟−1 ] ] ] ] ] ] ] ] ] ] ] ] ] , 𝐵𝑎= [0, 0, . . . , 0, 1]𝑇. (67)
Because𝐴𝑎is Hurwitz,𝑒𝑎is BIBO stable. In (63) it was shown that𝑠1is ultimately bounded and that|𝑠1(𝑡)| ≤ 𝑠1maxas𝑡 →
∞. Thus, as𝑡 → ∞, (66) can be rewritten as follows:
̇𝑒
𝑎≤ 𝐴𝑎𝑒𝑎+ 𝐵𝑎𝑠1max (68)
We define the positive-definite Lyapunov function𝑉𝑎as
𝑉𝑎 = 𝑒𝑇𝑎𝑃𝑎𝑒𝑎. (69)
Because𝐴𝑎 is Hurwitz, a positive definite matrix𝑃𝑎 exists such that 𝐴𝑇𝑎𝑃𝑎+ 𝑃𝑎𝐴𝑎= −𝐼. (70) The derivative of𝑉𝑎is ̇𝑉 𝑎 ≤ −𝑒𝑇𝑎𝑒𝑎+ 2𝑒𝑇𝑎𝑃𝑎𝐵𝑎𝑠1max ≤ − 𝑒𝑎22+ 2𝜆max(𝑃𝑎) 𝑠1max𝑒𝑎2 ≤ − (1 − 𝜃𝑒) 𝑒𝑎22− 𝜃𝑒𝑒𝑎22 + 2𝜆max(𝑃𝑎) 𝑠1max𝑒𝑎2. (71) Then, ̇𝑉 𝑎≤ − (1 − 𝜃𝑒) 𝑒𝑎22 (72)
for all ‖𝑒𝑎‖2 ≤ 𝜇1 where 𝜇𝑒 = 2𝜆max(𝑃𝑎)𝑠1max/𝜃𝑒. Conse-quently,𝑒𝑎converges to the bounded ball,𝐵𝑒𝑎as
𝐵𝑒𝑎= {𝑒𝑎| 𝑒𝑎2≤ 𝜆max(𝑃𝑎)
𝜆min(𝑃𝑎)𝜇𝑒} (73)
as𝑡 → ∞.
Step 3. With|𝑧2| ≤ 𝜇𝑧2, we obtain
̇𝑥 𝑟+1= 𝑥𝑟+2 ... ̇𝑥 𝑛−1= 𝑥𝑛 𝑎𝑛𝑥𝑛 ≤ −𝑛−1∑ 𝑖=𝑟+1 𝑎𝑖𝑥𝑖+ 𝜉 + 𝜇𝑧2. (74)
Because𝑒0,𝑒1,. . .,𝑒𝑟−1converge to the bounded ball𝐵𝑎and because𝑦𝑑has continuous derivatives up to the𝑛th order,𝜉 =
−𝑓𝑟(𝑥𝑎) + 𝑦(𝑟)
𝑑 − 𝑑1− ∑𝑟−1𝑖=1𝜎𝑖𝑒𝑖+1is bounded. Equation (74) is
simplified as
̇𝑥
𝑏𝑧 ≤ 𝐴𝑏𝑥𝑏𝑧+ 𝐵𝑏(𝜉max+ 𝜇𝑧2) . (75)
We define the positive-definite Lyapunov function𝑉𝑏as
Because𝐴𝑏 is Hurwitz, a positive definite matrix𝑃𝑏 exists such that 𝐴𝑇 𝑏𝑃𝑏+ 𝑃𝑏𝐴𝑏= −𝐼. (77) The derivative of𝑉𝑏is ̇𝑉 𝑏≤ −𝑥𝑇𝑏𝑧𝑥𝑏𝑧+ 2𝑥 𝑇 𝑏𝑃𝑏𝐵𝑏(𝜉max+ 𝜇𝑧2) ≤ − 𝑥𝑏𝑧 2 2+ 2 𝑎𝑛𝜆max(𝑃𝑏) (𝜉max+ 𝜇𝑧2) 𝑥𝑏𝑧2 ≤ − (1 − 𝜃2) 𝑥𝑏𝑧22− 𝜃2𝑥𝑏𝑧22 +2𝜆max(𝑃𝑏) 𝑎𝑛 (𝜉max+ 𝜇𝑧2) 𝑥𝑏𝑧2. (78) where0 < 𝜃2< 1. Then, ̇𝑉 𝑏≤ − (1 − 𝜃1) 𝑥𝑏𝑧 2 2 (79)
for all‖𝑥𝑏𝑧‖2 ≤ 𝜇2where𝜇2 = (2𝜆max(𝑃𝑏)/𝜃2𝑎𝑛)(𝜉max+ 𝜇𝑧2). From Theorem 4.18 of [9], there exists𝑇2such that
𝑥𝑏𝑧2≤
𝜆max(𝑃𝑏)
𝜆min(𝑃𝑏)𝜇2 (80)
for all𝑡 ≥ 𝑇2. Consequently,𝑥𝑏 is also ultimately bounded with the ultimate bound of𝑥𝑏𝑧.
Remark 10. As the controller gains 𝑘1 and 𝑘2, and the observer gains1/𝜀1and1/𝜀2increase,‖𝑒𝑎‖2becomes smaller. If the disturbances𝑑1 and 𝑑2 are constant, we see that the disturbance estimation errors𝑑̃1 and 𝑑̃2 converge to zeros from (12). Then, 𝑒𝑎 converges to zero. Consequently, the output tracking error𝑒1converges to zero.
5. Performance Analysis
5.1. Numerical Simulation Study. Simulations were per-formed to analyze the performance of the proposed method. In these simulations, we used the system
̇𝑥 1= 𝑥2 ̇𝑥 2= 3𝑥1𝑥2+sin(𝑥2) + 20𝑥3+ 4𝑥4+ 𝑑1 ̇𝑥 3= 𝑥4 ̇𝑥 4= 𝑥12+ 2𝑥2+ 3sin(2𝑥3) + 𝑥4 + (1 + 0.5cos(0.1𝑥1)) 𝑢 + 𝑑2 (81)
where 𝑑1 = sin(𝜋𝑡) and 𝑑2 = 2 + cos(5𝑥1). The desired reference trajectory𝑥1𝑑 = (1 − 𝑒−2𝑡)sin(0.2𝑡)was used. The controller was designed as
𝜉1= ̂𝑑1−𝑥2 𝜀1 𝜉2= ̂𝑑2−𝑥4 𝜀2 ̇̂𝜉 1= −𝜀1 1 (𝜉1+ 𝑥𝑟 𝜀1) + 1 𝜀1(−3𝑥1𝑥2−sin(𝑥2) − 2𝑥3 − 4𝑥4) ̇̂𝜉 2= −𝜀1 2 (𝜉2+ 𝑥𝑛 𝜀2) − 1 𝜀2(−𝑥21− 2𝑥2− 3sin(2𝑥3) − 𝑥4) +𝜀1 2(1 + 0.5cos(0.1𝑥1)) 𝑢 𝑠1= 𝜎0𝑒0+ 𝜎1𝑒1+ 𝑒2 𝑠2= 2𝑥3+ 4𝑥4 𝑠2𝑑= − (3𝑥1𝑥2+sin(𝑥2)) + ̈𝑦𝑑− ̂𝑑1− (𝜎0𝑒1+ 𝜎1𝑒2) − 𝑘𝑠1𝑠1 𝑢 = − 1 4 (1 + 0.5cos(0.1𝑥1))(𝑎3𝑥4− ̇𝑠2𝑑+ 𝜙1(𝑧2) − 𝜙2(𝑧2)) − 1 (1 + 0.5cos(0.1𝑥1))(𝑥 2 1+ 2𝑥2 + 3sin(2𝑥3) + 𝑥4+ ̂𝑑2) (82) where𝜙1(𝑧2) = 𝑘𝑧1|𝑧2|1/2sgn(𝑧2)and 2̇𝜙(𝑧2) = −𝑘𝑧2sgn(𝑧2). In controller (82), the following parameters were used:𝑘𝑠1=
1000,𝑘𝑧1 = 20,𝑘𝑧2 = 10,𝜎0 = 100,𝜎1 = 20,𝜀1 = 0.1, and
𝜀2= 0.05.
The estimation performance of the DOB is shown in Figure 1. The disturbances were well estimated by the DOB. The tracking performances of𝑠1and𝑠2are shown in Figure 2.
𝑠1 and 𝑠2 converged to the neighborhood of zero and
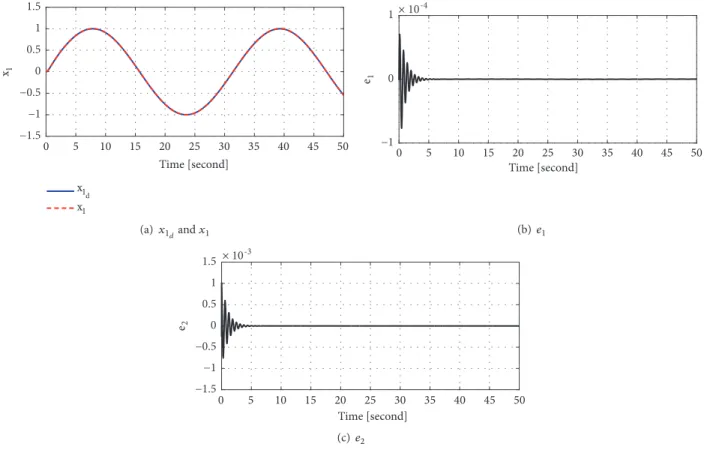
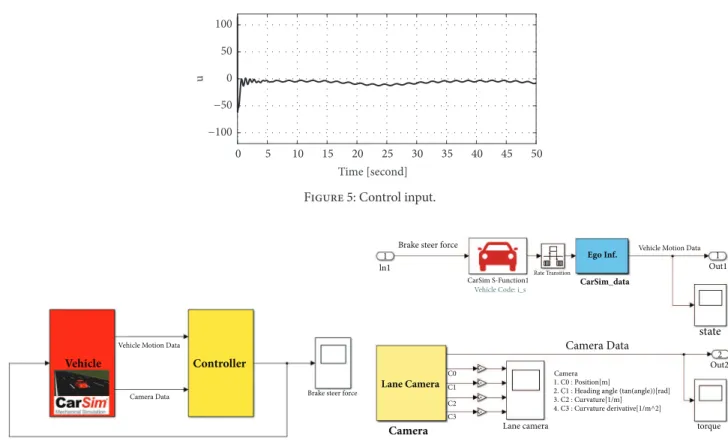
neighborhood of𝑠2𝑑, respectively, because the controller and observer gains were sufficiently high to suppress the effect of the estimation error. The tracking performance and state variables are shown in Figures 3 and 4. We see that both tracking errors𝑒1and𝑒2converged to almost zero because of the proposed controller (82). Because of the disturbance and nonzero trajectory, state variables𝑥3and𝑥4did not converge to zeros, but were bounded. Figure 5 shows the control input. Because the control method was designed using STA, there was no chattering problem.
5.2. Application to Differential Braking Control in Vehicle Lateral Dynamics. To evaluate the performance of the pro-posed method in a practical system, the propro-posed method was applied to the differential braking control system in a vehicle. In the vehicular control system, the lateral position is controlled for avoiding collisions using differential brake forces when the driver changes the lane under collision risk or with a vehicle in the blind spot [25]. The lateral control system with the differential braking is
Time [second] −1.5 −1 −0.5 0 0.5 1 1.5 d1 d1 1 Estimated d 1 0 5 10 15 20 25 30 35 40 45 50 (a)𝑑1and𝑑̂1 Time [second] 0 1 2 3 d2 d2 Estimated d2 0 5 10 15 20 25 30 35 40 45 50 (b)𝑑2and𝑑̂2
Figure 1: Estimated disturbances.
Time [second] 0 5 10 15 20 25 30 35 40 45 50 −5 0 5 s1 × 10-3 (a)𝑠1 Time [second] s2 d s2 0 5 10 15 20 25 30 35 40 45 50 −2 −1 0 1 2 s2 (b)𝑠2𝑑and𝑠2
Figure 2: Tracking performances of𝑠1and𝑠2.
̇𝑒 1= 𝑒2 ̇𝑒 2= 𝑎22𝑒2+ 𝑎23𝑒3+ 𝑎24𝑒4+ 𝑏𝛿2𝛿 + 𝑏𝑤2 ̇𝜓𝑑+ 𝑑1 ̇𝑒 3= 𝑒4 ̇𝑒 4= 𝑎42𝑒2+ 𝑎43𝑒3+ 𝑎44𝑒4+ 𝑏𝛿4𝛿 + 𝑏𝑤4 ̇𝜓𝑑+ 𝑏𝐹4𝐹𝑏𝑠 + 𝑑2. (83)
where𝑒1is the lateral offset,𝑒2is the derivative of the lateral offset, 𝑒3 is the yaw error, 𝑒4 is the yaw error rate, 𝐹𝑏𝑠 is the differential braking force control input,𝛿is the steering wheel angle, ̇𝜓𝑑is the desired yaw rate,𝑑1is the disturbance including the driver torque and modeling error, and𝑑2is the disturbance including self-aligned torque, modeling error, etc. The detailed definitions of the parameters can be found in [28]. The aim of controller design is to determine the brake steer force𝐹𝑏sthat makes
lim
𝑡→∞𝑒1(𝑡) = 0. (84)
when the driver attempts the lane change under a collision risk or with a vehicle in the blind spot. This system (83) satisfies Assumption 2. The controller is designed as
𝜉1= ̂𝑑1−𝑥𝜀𝑟 1 𝜉2= ̂𝑑2−𝑥𝑛 𝜀2 ̇̂𝜉 1= −𝜀1 1(𝜉1+ 𝑥𝑟 𝜀1) + 1 𝜀1 (−𝑎22𝑒2− 𝑎23𝑒3− 𝑎24𝑒4−) ̇̂𝜉 2= −𝜀1 2(𝜉2+ 𝑥𝑛 𝜀2) + 1 𝜀2(−𝑎42𝑒2− 𝑎43𝑒3− 𝑎44𝑒4 − 𝑏𝐹4𝐹𝑏𝑠) 𝑠1= 𝜎0𝑒0+ 𝜎1𝑒1+ 𝑒2 𝑠2= 𝑎23𝑒3+ 𝑎24𝑒4 𝑠2𝑑= −𝜎0𝑒1− 𝜎1𝑒2− 𝑎22𝑒2− 𝑏𝛿2𝛿 − 𝑏𝑤2 ̇𝜓𝑑− 𝑑1 − 𝑘𝑠1𝑠1 𝐹𝑏𝑠= −𝑎 1 24𝑏𝐹4[𝑎23𝑒4 + 𝑎24(𝑎42𝑒2+ 𝑎43𝑒3+ 𝑎44𝑒4+ 𝑑2)]
Time [second] x1 d x1 0 5 10 15 20 25 30 35 40 45 50 −1.5 −1 −0.5 0 0.5 1 1.5 x1 (a)𝑥1𝑑and𝑥1 Time [second] 0 5 10 15 20 25 30 35 40 45 50 −1 0 1 e1 × 10-4 (b)𝑒1 Time [second] 0 5 10 15 20 25 30 35 40 45 50 −1.5 −1 −0.5 0 0.5 1 1.5 e2 × 10-3 (c)𝑒2
Figure 3:𝑥1tracking performance and errors.
Time [second] −0.05 0 0.05 x3 0 5 10 15 20 25 30 35 40 45 50 (a)𝑥3 Time [second] 0 5 10 15 20 25 30 35 40 45 50 −0.2 0 0.2 0.4 0.6 x4 (b)𝑥4 Figure 4:𝑥3and𝑥4. − 1 𝑎24𝑏𝐹4[𝑎24(𝑏𝛿4𝛿 + 𝑏𝑤4 ̇𝜓𝑑) − ̇𝑠2𝑑+ 𝜙1(𝑧2) − 𝜙2(𝑧2)] (85) where𝜙1(𝑧2) = 𝑘𝑧1|𝑧2|1/2sgn(𝑧2)and 2̇𝜙(𝑧2) = −𝑘𝑧2sgn(𝑧2), 𝜎0 = 1000000,𝜎1 = 200,𝜎3 = 50,𝜎4 = 0,𝑘𝑠1 = 5,𝑘𝑧1 = 1,
𝑘𝑧2 = 0.1,𝜀1= 0.5, and𝜀2= 0.5. The velocity of the vehicle is
80 km/h on a straight road. The test scenario is as follows:(1) at 5 sec., the driver attempts lane change under collision risk with the object vehicle in the target lane;(2) as soon as the driver attempts lane change, the differential braking control
(DBC) system is activated with a warning against the collision risk;(3) the driver attempts to keep the original lane with the help of the DBC;(4) the DBC system operates to move the vehicle to the center of the original lane.
Simulations were performed using the vehicle dynamic software CarSim and Matlab/Simulink as shown in Figure 6. The S-function coded in C language was used for implement-ing the proposed slidimplement-ing mode backsteppimplement-ing control method. The output of CarSim consists of vehicle motion data such as steer angle, lateral velocity, and brake force. We also modeled the lane camera sensor to obtain the lane coefficients [29];𝑐0 denotes the lateral lane center offset at c.g.,𝑐1denotes the in-lane heading slop, the heading angle error at c.g.,𝑐2denotes
Time [second] u 0 5 10 15 20 25 30 35 40 45 50 −100 −50 0 50 100
Figure 5: Control input.
Vehicle
Vehicle Motion Data
Camera Data
Controller
Brake steer force
(a) Overall simulation structure that consists of CarSim vehicle model
Lane Camera Camera C0 C1 C2 C3 Lane camera Camera 1. C0: Position[m]
2. C1: Heading angle (tan(angle))[rad]
3. C2: Curvature[1/m] 4. C3: Curvature derivative[1/m^2] torque Out2 Out1 2 Camera Data state Vehicle Motion Data Ego Inf.
CarSim_data Rate Transition
CarSim S-Function1 Vehicle Code: i_s Brake steer force
ln11 1
(b) Vehicle part. The output of lane camera is lane coefficients;𝑐0denotes
the lateral lane center offset at c.g.,𝑐1denotes the in-lane heading slop, the
heading angle error at c.g.,𝑐2denotes curvature/2 at𝑠 = 0, and𝑐3denotes the curvature-rate/6
Figure 6: Vehicle and camera models used in the simulations.
Time [second] −40 −20 0 20 40 S te erin g w he el an g le [d eg]
Figure 7: Steering wheel angle.
curvature/2 at𝑠 = 0, and 𝑐3 denotes the curvature-rate/6. The steering wheel angle used in the simulations is shown in Figure 7.
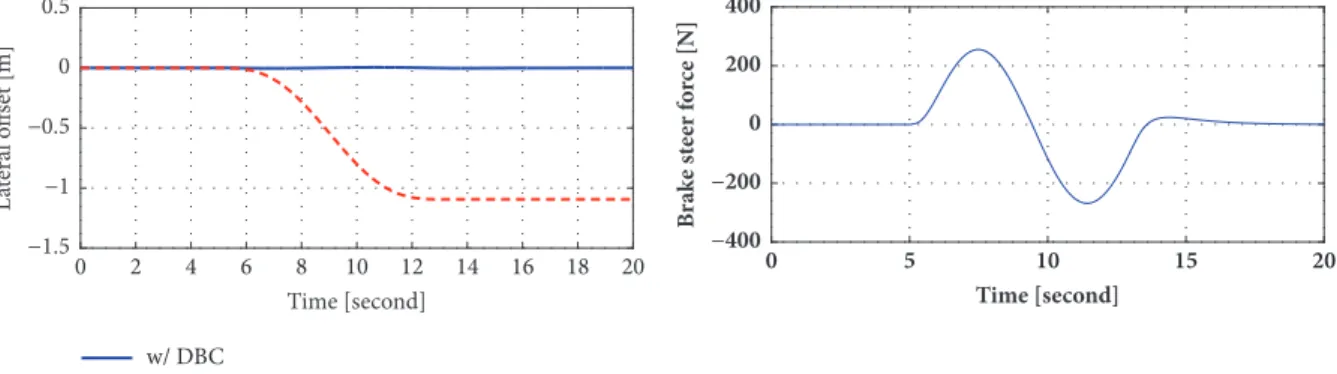
Two cases were tested: (1) driving with proposed con-troller (85);(2) driving without proposed controller (85). The simulation results are shown in Figure 8. The lateral offset errors of the two cases are depicted in Figure 8(a). Figure 8(b) shows the control input. Because the control method was designed using STA, there was no chattering problem. In case 2 (without DBC), for the given steering wheel angle, the lateral offset error𝑒1 becomes 1.1 m owing to the steering wheel angle. On the other hand, in case 1 (with DBC), the lateral offset error𝑒1was maintained to nearly zero because
the brake steer force compensated for the steering wheel angle using the proposed method (85). The yaw rate error𝑒4 was also kept to nearly zero. Figure 9 shows the estimated disturbance. External disturbances appeared owing to the bank angle, road reaction force, the assumptions for this modeling, etc. The external disturbances were compensated by using utilizing the proposed method. Consequently, the lateral offset𝑒1converged to zero despite the steer angle and the disturbances.
6. Conclusions
In this paper, we proposed a sliding-mode backstepping con-trol for the coupled normal form of nonlinear systems. The proposed method was developed by combining backstepping and sliding-mode control. The key idea of the proposed method is that the linear terms of the state variables of the second subsystem are lumped into the virtual input in the first subsystem. To compensate for the disturbances, a DOB was developed. The stability of the closed-loop is validated by using the ISS property. Through numerical simulations and application to a vehicle system, the proposed method was observed to lead to convergence of the output to the desired output trajectory under the described disturbances.
The main drawback is the use of the derivative of the measured signal in the controller. It may result in the
w/ DBC w/o DBC 0 2 4 6 8 10 12 14 16 18 20 Time [second] −1.5 −1 −0.5 0 0.5 L at eral o ff se t [m]
(a) Lateral offset error𝑒1
−400 −200 0 200 400 B rake st ee r f o rc e [N] Time [second]
(b) Brake steer force input𝐹𝑏𝑠
Figure 8: Control performance.
Time [second] −0.3 −0.2 −0.1 0 0.1 0.2 0.3 Dist urba n ce 1 0 2 4 6 8 10 12 14 16 18 20 (a)𝑑1 Time [second] −0.15 −0.1 −0.05 0 0.05 0.1 0.15 Dis turba n ce 2 0 2 4 6 8 10 12 14 16 18 20 (b)𝑑2 Figure 9: Estimated disturbances.
amplification of the measurement noise. Generally, the filter technique is widely used to obtain the derivatives of the measured signals without the amplification of the measure-ment noise [30, 31]. However, the use of the filter may cause the phase lag in the feedback loop. In future works, we will develop the control method with the consideration of the amplification of the measurement noise in the derivatives of the measured signals.
Data Availability
The data used to support the findings of this study are included within the article.
Conflicts of Interest
The authors declare that they have no conflicts of interest.
Acknowledgments
This research was supported by the Basic Science Research Program through the National Research Foundation of Korea funded by the Ministry of Education under Grant NRF-2016R1C1B1014831 and the Research Program, Development
of High Voltage Brake System for Response to Safety Regula-tions of Micro eMobility (20003066), funded by the Ministry of Trade, Industry and Energy (MOTIE, Korea).
References
[1] R. A. Freeman and J. A. Primbs, “Control Lyapunov new ideas from an functions: old source,” inProceedings of the 35th IEEE Conference on Decision and Control, pp. 3926–3931, December 1996.
[2] X. Huang, W. Lin, and B. Yang, “Global finite-time stabilization of a class of uncertain nonlinear systems,”Automatica, vol. 41, no. 5, pp. 881–888, 2005.
[3] W. M. Haddad and V. Chellaboina, Nonlinear Dynamical Systems and Control. A Lyapunov-Based Approach, Princeton University Press, Princeton, NJ, USA, 2008.
[4] W. Kim, D. Shin, and C. C. Chung, “The Lyapunov-based controller with a passive nonlinear observer to improve position tracking performance of microstepping in permanent magnet stepper motors,”Automatica, vol. 48, no. 12, pp. 3064–3074, 2012.
[5] A. Isidori,Nonlinear Control Systems: An Introduction, Springer, Berlin, Germany, 2nd edition, 1989.
[6] C. Xia, Q. Geng, X. Gu, T. Shi, and Z. Song, “Input, output feed-back linearization and speed control of a surface permanent-magnet synchronous wind generator with the boost-chopper
converter,”IEEE Transactions on Industrial Electronics, vol. 59, no. 9, pp. 3489–3500, 2012.
[7] V. Utkin, J. Guldner, and J. Shi, Sliding Mode Control in Electromechanical Systems, Taylor & Franci, Philadelphia, PA, USA, 1999.
[8] C. Guan and S. Pan, “Adaptive sliding mode control of electro-hydraulic system with nonlinear unknown parameters,”Control Engineering Practice, vol. 16, no. 11, pp. 1275–1284, 2008. [9] H. Khalil,Nonlinear Systems, Prentice-Hall, Upper Saddle River,
NJ, USA, 3rd edition, 2002.
[10] W. Kim, D. Shin, Y. Lee, and C. C. Chung, “Simplified torque modulated microstepping for position control of permanent magnet stepper motors,”Mechatronics, vol. 35, pp. 162–172, 2016. [11] M. Krsti´c, I. Kanellakopoulos, and P. Kokotovic’,Nonlinear and
Adaptive Control Design, Wiley, New York, NY, USA, 1995. [12] A. Alleyne and R. Liu, “A simplified approach to force control
for electro-hydraulic systems,”Control Engineering Practice, vol. 8, no. 12, pp. 1347–1356, 2000.
[13] J. Zhou, C. Wen, and Y. Zhang, “Adaptive backstepping con-trol of a class of uncertain nonlinear systems with unknown backlash-like hysteresis,”IEEE Transactions on Automatic Con-trol, vol. 49, no. 10, pp. 1751–1757, 2004.
[14] J. J. Choi, S. I. Han, and J. S. Kim, “Development of a novel dynamic friction model and precise tracking control using adaptive back-stepping sliding mode controller,”Mechatronics, vol. 16, no. 2, pp. 97–104, 2006.
[15] J. Yao, Z. Jiao, and D. Ma, “Extended-state-observer-based output feedback nonlinear robust control of hydraulic systems with backstepping,”IEEE Transactions on Industrial Electronics, vol. 61, no. 11, pp. 6285–6293, 2014.
[16] S.-I. Han and J.-M. Lee, “Recurrent fuzzy neural network backstepping control for the prescribed output tracking perfor-mance of nonlinear dynamic systems,”ISA Transactions, vol. 53, no. 1, pp. 33–43, 2014.
[17] J. Yao, Z. Jiao, and D. Ma, “Adaptive robust control of dc motors with extended state observer,”IEEE Transactions on Industrial Electronics, vol. 61, no. 7, pp. 3630–3637, 2014.
[18] W. Kim and C. C. Chung, “Robust output feedback control for unknown non-linear systems with external disturbance,”IET Control Theory & Applications, vol. 10, no. 2, pp. 173–182, 2016. [19] J. Yao and W. Deng, “Active disturbance rejection adaptive
control of uncertain nonlinear systems: theory and application,”
Nonlinear Dynamics, vol. 89, no. 3, pp. 1611–1624, 2017. [20] J. Yao and W. Deng, “Active disturbance rejection adaptive
control of hydraulic servo systems,” IEEE Transactions on Industrial Electronics, vol. 64, no. 10, pp. 8023–8032, 2017. [21] C. M. Kang, W. Kim, and C. C. Chung, “Observer-based
backstepping control method using reduced lateral dynamics for autonomous lane-keeping system,”ISA Transactions, vol. 83, pp. 214–226, 2018.
[22] S. Bouabdallah and R. Siegwart, “Backstepping and sliding-mode techniques applied to an indoor micro quadrotor,” in
Proceedings of the IEEE International Conference on Robotics and Automation, pp. 2247–2252, Barcelona, Spain, April 2005. [23] H. Y. Li and Y. A. Hu, “Robust sliding-mode backstepping
design for synchronization control of cross-strict feedback hyperchaotic systems with unmatched uncertainties,” Commu-nications in Nonlinear Science and Numerical Simulation, vol. 16, no. 10, pp. 3904–3913, 2011.
[24] W.-H. Chen, D. J. Ballance, P. J. Gawthrop, and J. O’Reilly, “A nonlinear disturbance observer for robotic manipulators,”IEEE
Transactions on Industrial Electronics, vol. 47, no. 4, pp. 932–938, 2000.
[25] R. Rajamani,Vehicle Dynamics and Control, Springer, New York, NY, USA, 2nd edition, 2012.
[26] A. Levant, “Sliding order and sliding accuracy in sliding mode control,”International Journal of Control, vol. 58, no. 6, pp. 1247– 1263, 1993.
[27] J. A. Moreno and M. Osorio, “Strict Lyapunov functions for the super-twisting algorithm,”IEEE Transactions on Automatic Control, vol. 57, no. 4, pp. 1035–1040, 2012.
[28] Y. S. Son, W. Kim, S.-H. Lee, and C. C. Chung, “Robust multirate control scheme with predictive virtual lanes for lane-keeping system of autonomous highway driving,”IEEE Transactions on Vehicular Technology, vol. 64, no. 8, pp. 3378–3391, 2015. [29] C. M. Kang, S. Lee, and C. C. Chung, “Comparative evaluation
of dynamic and kinematic vehicle models,” inProceedings of the IEEE 53rd Annual Conference on Decision and Control (CDC ’14), pp. 648–653, Los Angeles, Calif, USA, December 2014. [30] B. Kristiansson and B. Lennartson, “Robust tuning of PI and
PID controllers: using derivative action despite sensor noise,”
IEEE Control Systems Magazine, vol. 26, no. 1, pp. 55–69, 2006. [31] J. Q. Han, “From PID to active disturbance rejection control,”
IEEE Transactions on Industrial Electronics, vol. 56, no. 3, pp. 900–906, 2009.
Hindawi www.hindawi.com Volume 2018
Mathematics
Journal of Hindawi www.hindawi.com Volume 2018 Mathematical Problems in Engineering Applied Mathematics Hindawi www.hindawi.com Volume 2018Probability and Statistics
Hindawi
www.hindawi.com Volume 2018
Hindawi
www.hindawi.com Volume 2018 Mathematical PhysicsAdvances in
Complex Analysis
Journal ofHindawi www.hindawi.com Volume 2018
Optimization
Journal of Hindawi www.hindawi.com Volume 2018 Hindawi www.hindawi.com Volume 2018 Engineering Mathematics International Journal of Hindawi www.hindawi.com Volume 2018 Operations Research Journal of Hindawi www.hindawi.com Volume 2018Function Spaces
Abstract and Applied AnalysisHindawi www.hindawi.com Volume 2018 International Journal of Mathematics and Mathematical Sciences Hindawi www.hindawi.com Volume 2018
Hindawi Publishing Corporation
http://www.hindawi.com Volume 2013 Hindawi www.hindawi.com
World Journal
Volume 2018 Hindawiwww.hindawi.com Volume 2018Volume 2018
Numerical Analysis
Numerical Analysis
Numerical Analysis
Numerical Analysis
Numerical Analysis
Numerical Analysis
Numerical Analysis
Numerical Analysis
Numerical Analysis
Numerical Analysis
Numerical Analysis
Numerical Analysis
Advances inAdvances in Discrete Dynamics in Nature and SocietyHindawi www.hindawi.com Volume 2018 Hindawi www.hindawi.com Differential Equations International Journal of Volume 2018 Hindawi www.hindawi.com Volume 2018