Pr?:-quk;8 O p ~ n m l (701 3) X3.7(' )' F;3 71 4201 3 Brazilian Operabons Research Souely
Pnnted verslon ISSN 0101 -7438 1 Onllk veraon ISSN 1678-5'42
www w ~ c h brlpopc
A kON-STANDAIW
OPTIMAL
COKTROL
PROBLEM
ARISINGIN
l$YECOKOklICS
APPLIC:\rl'IOTI'Alan
Zinobcr* and
Suliadi Sufahani
I2rxcir.d Mq 3; 3 1 1 1 : Acc-lytllrl July 1OZ 201:
ABSTRACT. A rcccrlt optimal mntrol problcm it1 the arc3 of economics has mathmatical proptrtics that do not la11 into thc standard optimal control problem formulation. [n our prohlcn~ thc slate value at the titla1 time rhe sme, Y ( I - ) =
=:
is Cree i~nd unknown, and additionally the hgwngian intgrand in the f~tncrio~~ai 1s a p 1 w ~ 7 h . i ~ ~ consml firncl~mi nf lhc nnknt~wn valuc j i 1.1. 'I his Ir no1 a sundanl opl~mal eoncrol pn~blcni anti cilnnot ht. solrul u\lng l'oniyagin's Minimum I'nnciplc with the standad h o & q ctmctiiiins at thc final tlnw. 111 the stanchrtl pnbhlcm r ficc final state j - t f ' ~ yield\ a n ~ m x i i q houndarj condititrn p(7 ) 0, when ptl) 1s rhc cosmtc. Rccausc the integrand is a function of y~ T b , thc fkw ncccrvary condition IS thatr1T) should bc equal to a certain iatgral that is a continuous liuilction of T I . We iniroducc a continuous approximation of rbe piecewise cunslanl i n t g n ~ i d halction by using a hyperbolic rangen1 approach and ~ 4 v e ijn wdniple u s i q a C - ' dlooting dguriQm with Kwtunilrmion for sulvilig 1he'lic.u I'oint b u d ~ r y Value tbohlcm ( I'i'liVtJ). I'hc ni~n~nii\ing Tru. valr~c y( I'l is calculal~~l In :m outcr loop ~lcwlitm using the
(iulrlcn S L T ~ I ~ I or ljr~mt algurithm I:~)~npuratrvu 11o1dinc;lr prt~granmii~ig (h P) discrctc-timc rtsults arc r h ) pr~zmtrd
Keywords: optimal ammol, non-standard opiimal cnntn~l, piixiwisc constant ilitcgrand, ~wonomics, u)m- parativc ~bonlit~car progm~btning rwults.
Cdculus of Variatio~s (CoV) pnlvidcs thc ~lathcmalieal lkcory to solve extrcmixing iuneriotlal problems f i r ~ l i i c h a given iiinctional has tl smtionary value eitlier nlinirnunl or maxin~um [131.
Optimal control i s an ertensirln nf C:oV and it is a ma~hematical r)ptirni~atian mcihod Tur deriving optimal control politics. Optinla1 control c l ~ n n c l s thc paths of thc control variables t o optimiirc thc ~ 1 s t functitmal whilst satisfying (in this paper) ordinary diKe~cntial equations. I:cnnornics is
a sc~urcc of intcnsting applications o f Ihc lhcory of C'oV :md clplimal control 1'71. A
fns
classic:d manlpIt:b tllat m k t the use of optimal control am the drug bust hlrdtegy, topimil pndi~ctiun, optimal conmd in diwrclc mc~hanics, pllicy arangcmcnl and thc myalty payment pnlhlcm 15.7-91.*Comspiw~ding aulhor
khtlcll ctr M n ~ k m a d c s and Stidslim, Ilnivmily of Shctlicld. Shcllicid Pi3 7K11. lJnillrl K i n ~ d t m ~ .
64
A NON-STANDARD OPTJMAL CONTROL PROBLEM ARISING IN AN ECONOMICS APPLICATIONIn a recently studied wonomics prohlum a firm struggling will1 inttnsivcly low demand imf their product w i l l purposely incmsc t hc marginal cost by rcdreing t hc production o r the product and incrmscthc sclling m c c
I
I 11. I'hcmlimrc the wquircmcnt 10 pay a flat-rate n~yalty on wlc has the c f f w ofincm~sing the marginal cost and rhcrcby Qccrcasing the olitpul whilc simultaneously incm5ing thc pricc. 'I'hc cr~c?ct of permitling a nonlinear n)yalty I c d s ti) u n o n - s ~ a n d d I'oV prublcm not previously considcrcd.In
this papcr wc will dcmcmstratc somc orsolving Lllc p r o h l ~ m without discussing thc prccisc c~onomics dcuils.Lct us start by considering a simplc problcm. Wc wish to dclcmiinc thc control runc.tion r r ( t )
whcru L ( 10, 7'
1
that maximiws the integral fiunctiowalsllhjcct sdisrying ~ h c ~ ~ : i l c oniinary difknlnlial cqudion
$
N O ) with ~ ' ( 0 ) known and thc endpoint state valuc y ( T ) at timc r = T unknown. Tllc Lagran2ian intcgratid dcpcnds on the unknt~wn linal ralucy(7') and rhis is nit a skmJard optimal ctmln~l prohlcm bwausc l c lirnaion dopcnds on ?(TI. A standard optimal control often solves a problem with thc final state ,FIT) rrw and [hen thc boundary mndition p(T') is ~ c r o1
121. 'l+c i Iamiltonian f i ~ r opiirnal contrid thcory arises wllcn using Potitryagin's hiIinimtjn1 Principle (PMP) [13]. It is uscd to find the optimal a)nln>l Tor taking a dynamicdl system Iixrrn one s ~ t c LO xnothcr a ~ h j c c t to satisrying thc undcrl ying ordinary dift'crential equations [12].Wc
introduce a continuuus approximation of thc picucwiw conslant intcgrdnd runction hy using a hypcshc>lic Langcnt appnuch. 'I'he prcxanl piper will indicatc how such problctns can be sol\rcd. In thc acxt sectionwc
wiil discuss thc theoretical q p n w o h in o d c r t o solve the problem. IVc will fi,llow tho work oTMalinowska mind lilm 161, in proving thc boundary condition for CoV [2]. Then wc will dctnonstratc a numerical cxamplcand
wo will IISL' (: I I Lo solve il. We also cornparu 1hc rc$ulk wilh a nonlinear pn)gramming(NI') discrctc-time appmqch and then prcscnt somc conclusions.2 NUN-STANDARD OPTiMAL CONTROL
In classical optimal control problcnls. the function (1) docs not depend specifically on tlic frcc value -v( 1'). I lowover, in our caw, lhc I agrmgidm inirxrdnd runction 1 d~qwnds on ~ ( 7 ) . We prcsent a rcccnt thcorem that
indicates
that y ( T ) is cqual to a certain intcgnrl at timc T. Ma-linowska and li~ms 161 harc proven rhis hounda~ condititm for C:oV on limc scales 121. I'hc tbllowing t h t w m c m bc applicd to our problem.
'fhcnrcm: 16.71
If j c .) is thc solution of thc following problcm
ALAEI ZINOBER and SUUADI SUTAI IAN1
65
4hcn
d -
F [ f .
,E(/),j(&),
: ~ ( l j ) = f;:(f. j(/), j [ f 1. j ( 1 . ) )dl: .P
fur all 1 E 10. 1.1. M o ~ ) \ w
1;rom an ovlimal wnln)l penpcxtlvconc
1
12. 131
ha% thccc~talo p ( ? ' ) f < { t . ji~). ; ( I ] . y(?'l)- Hcnccp ( T ) =
-
I'
fi
( r .
~ ( t ) .&r).
j t l-l)'/r(6) where p(f is the I lamiltt~nian mul~iplim or ciwtale runcticm. Ihctmm 1 shows lhal lhc nCLiC'ssary optimal condition docs ~iot havc p l T ) = O as is thc case for thc standard classical optimal coritrol pnlblcm.
Suppose that wc wish Lo considcr a pia..cwisc consrant functiorl f' in (2). For cxamplc, considcr
w hcm : .vi 7) and
and
a for J.
.:
0.5:?+' =
h for 1 > 0.5,-
with r r and
t~
rcal nuniberr. We have a discontinuous intwgand thal cannot hc difrercntiatcd ax mluircd in ihc final bour~day condition (71. WC introduce a conti~luous approxin~wlion of thc piwcwisc ujnstanl int~grdnd funclion by using a hyperbolic tangent appwdch in c d e r to have a continuous smooth li~nc~ion. Illl~cf appwximaiions haw been lricd but thcy rquircd hundrcds of terms, fir insmcc in a Fourier strius approximation. 'Ihu tanh(kj) q r c ~ x i m a ~ i o n used hen: is vcry accutatc. A numerical cxsmplo will hc prcscntud in thc next swlion.3 N I I % l R K l C A I ~ EXAM PI,E
'Jhc
cxamplc is a sin~plificd vcrsion ofthc propclscd monomics problcms bul has thc samc main t a t u m . I'he sutt: qualion (Olfl! system) i s dwribed byWe wish lo rnaxirnisc
. / / ( - ) I
=I'
( { t , y t ~ ] . ~ ( b ) . :)dli s a contintlous function
and
T
= 10. W{y) is a piecewise constaiit function whereI
I for .I. ( 0 . 5 ~ W (J) =1.2 fur 3 =. 0.52
1% :ippmximatc W ( y ) using a hypcrbulic tangcni fi~nction
ant! w c sclc~1 A- s u i ~ b l y large. Ici 450 say. llilr larger values of
4-
wc obtain a smrwthcr approximation of tlic filnctiori F t ' ( j ) (scc Fig. 1). Thc known initial statc is y(0) = 0 and final s m c valuc : y i 7 j is lin. 'l'hcrclirrc ~ h c I lamilionian is dcscrihcd by H [ I . J., i l l p ) 1 p.ltand
'I'hc wsmc saLislim
[image:4.595.50.462.229.708.2]-- -- MAN ZINOBER and SUUADl SUrAllANl
67
Ilquarion (6) holds a)
(
- ( ~ ) ? * { t ) ) ) d f W i y ) ! i f ) sin4
RESULTS
I here are several necessary conditions that need LU be wtisfid, such the stare equiltiun (9) and thc costatc quation ( 16) along with lhc stationariiy condition (17). Also thc initial condition of y(i)) is given and we select ti guessed initial wlue of' p ( O ) . We a l w n d to make bure the boundary condition of ( 18) wH1 bc saiisficd :it the finit1 time. I-, 'This is a two point boundary value prublen~. We need to m b u r e that tlie ite:raliun ~ x l u e of r osed in (1 7) will be q u a 1 to L'I /') a1 the final time 7'. 'This is satisfied in our algorilhm only whcn tllc p(7') boundary condition co~iverges. I'hen we will have the optinltll sulution. 'llie r n i r ~ i ~ ~ ~ i s i n g h e value XI 1') is calculated in an imtcr loop iteralion using ihc Goldcn Sccrion (or Brcnt) maximising linc search algorithm We used the I \ . ~ w T I shouting met1:tllud with 1 w p u e d values 1:1 = ptO) and v2 =
pr
i'). We usc thc programming languagc C i I in urdcr lc) wlvc Lhc shooting nlcthvd and oihcr algorithms described in the NurnMical Keceipe librdry 181. We itmite the system with the m t e quation ~ ( t ). c o s ~ a c equation p(c), the inlcgral of q! t and Ihc cost function J l t ) .An optimal solution ivzis u b ~ a i n d u i t l ~ high accuracy, Tlie msulls are
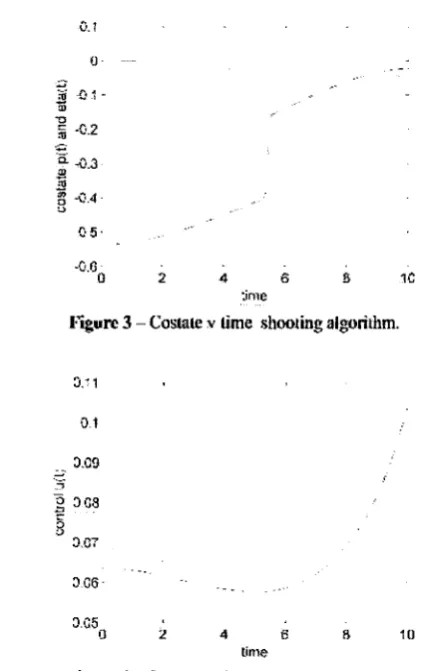
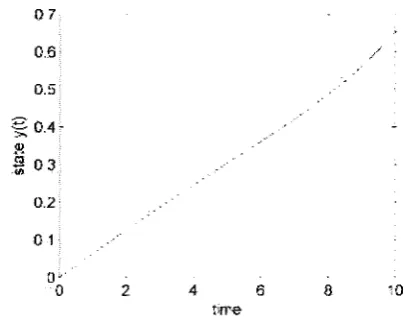
I:igurcs 2 4 shows ~ h c optimal cuwcs o r ihc skdlc? variahlc y(t ), adjoint varjablc / , ( I ) and the integml ciaIl) and the control variable t i ( ! 1.
-G.B
0 2 4 6 S 1C
5nie
k3"lpre 3 - Castale v time slming algorithm.
3 C5
0 2 4 a 8 1U
[image:6.599.131.343.71.407.2]tine
Figure 4 Control v tinie shooting algorithm.
I:igurcu 5 7 show \:hc plot of optimal rcuulb for h o ~ h l c shooting and mnlincar p ~ ~ g r a m m i n g
{SP)
appmaclles fbr the state variable y (t 1, cosiate arrd c o n t r l variable ri ( I 1. The wsults areewcniidly the u m c . 'I'ke NI' rcuuku arc gtwd but the I lamillr~nian uhcn)ting appvach 1s a much more accurate approach.
In this paper we Iravve sliown ho>w to solrc a non-standard optimal ccmlrol pn>hl~m- Wc hare p ~ ~ c n l c d thc ncccssary conditions and Ihc wn~pulational proccdurcs in order to obtain optimal so)lulbn~. 'lhc ckplirna1 solcllitrn ol'a lust pwhlern has h~wn prcswtcd. A shtxliing algi~rithrn to- gcthcr with a n~wimising approach was used to obtain a highly accurdc solution, and con1p:urd wilh a discrc~c-time nonlinear pn~grdmming solution. Our ~cxhniquw can bc applied 10 the 'ac- h ~ a l mthcr morc wmplicalcd ccononlics problcnl whcrc thc Lagrangian inrcgrand is pic~czrise ctbnstani in many s ~ g a and depends upcm ! ( I ' ) which is a prk~ri unknown.
70
A hW3KSTANDARD OPTIMAL CONTROL PROBLEM ARISING IN AN EGOhlOMlCSAPPLlCATlONMAN ZINOBER and SULLADI SurNiwl
7*
111
RI:TTS JT. 2!Ml. Practical mcthads for uptinrat control using nonlinear, Advances in andI'w~trol, Sccicty fur lndi~slnal and AppIiu1 Maiktmluics (SIAbl), Philadelphia. PA.
12
1
Fli12 HI:I I<A 1tAC & '1.o~ I ~ I - s I)FM. 200X. I lighcr-orticr camlculr~s or varialions on timc . w ~ l a - Maih- enialical c~ntrol drtory and finance. pp. l4c)-150. Springer, Berlin.[3] FoLRlrR R, CAY DM 8c KI.:RN IC; t l h ~ BW. 2002. A W L : a nlodelling language for ma~hcmalical programming, Duxhry, PmQf3rooksKolc Publishing Comlmny.
141 S I I . I . A ~ I I;. 2(K)9. liw~iltaiiai~ q p n ~ a c h to uptinlality coiditiuns in ~wntrol 111cury and nous- nuwlh anindy~iq. N{~ncmtullh analyrjc convc)l t h a q w d dl Ecrcn~ial crliations, I N DAM, liomu. hUp:~~e~~en~.math.t111ipd,i~nac1deO~sit~'deI'a111b~Iil~'stehni.~C
[ 5 ] LEOU.%RI) D Bi LOKG RV. 1992. Oplimal control ~hcon. and static optimiwlion in xonon~ics, Cambridge IJt~~vcrstty Press. C'anlbndgc.
IOJ
M A l . I h o \ k ' s h 4 A tl & 'I ~ K K I :, I)Phl. 2010. Naturiil h ~ u n h y wnrlitions ill t h ~ calculus of'w i a i t ~ n s - :%Ia1lii*1?1uitcu/ .WVIJ?IJC/\ H I I ~ C ,.fpp/ic,d -%.~C~IIPPS- 33f 14): I 7 I 2 I722 Wilcy. do1 10.1 OOXmma. 1289.
[7] PI.:I)RO AFC. TORRlis DIiM & ZlKOl%t-'R ASI. 2010. A non-ulassical class ofva.arialiona1 problcms
with application in economics. ~~r~c.~-nuiioncti Jcntrnul ( I / ' :-/rrilicrtturicrrl 2$fr.lr,d~*IIirtg UIIJ :Viint~>,-ir.u!
Oj."ir~zivt:lriiorr, 113): 227 230. Lncl~rSdcncc. tltji: 10.1 5W.4.I MMNO.20 10.03 1750.
181 I'KI SS WII.'II (JKOJ S K Y
sn.
Vt 1 l l HI lhr;w
I.& k l A h V l KY 2007. N ~ ~ r n c r i c a l r w i ~ . ' l h cai% ol-giaitific conlpuring. lXrc1 edition. Cambridge Lnir. Prehd. Cambrid-ge.
[9] SI.:TIII SP & TIIOMPSON GL. 3000. Oplimal control theory Applicalions on nlanagctliet# scicncc and wonomics. SLxond edition. Kluwcr rycad~mic Publislwrs; ikston, Mi\.
4
10] V I N 1-1 I( H. 2000. Systcrn and ccmtrol: fuu~~dation and application oplinull control. 1Erkhu I3aslu11.Springer-Vcrlag KL% York, NcW Yt~clrk.