2018 International Conference on Modeling, Simulation and Analysis (ICMSA 2018) ISBN: 978-1-60595-544-5
Robust Adaptive Control of Two Chaotic Systems
with Unknown Parameters
Rui-qi WANG
1, Ke-jian CHEN
2and Jun-yuan GU
1 1Naval Aviation University, Yantai Shandong 264001, China2People's Liberation Army 91245 troops, Huludao Liaoning 264001, China
Keywords: Robust control, Adaptive control, Chaotic systems.
Abstract. A kind of robust adaptive control algorithm of two chaotic systems is proposed in this paper. The design strategy of the algorithm lies in constructing an update law of unknown parameters estimation of driven system. The chaotic systems are not required to satisfy the Lipschitz condition. The robust adaptive controller is designed to complete synchronization. A numerical situation was proposed to show the effectiveness.
Introduction
Chaotic system is great used in secure communication. Two chaotic systems Synchronization control is a key technology of secure communication and also a hot spot for researchers. Rongwei Guo designed a simple nonlinear adaptive control law, the use of LaSalle theorem [1] to achieve the synchronization of two chaotic systems. This is a novel approach, but does not consider unknown parameters.
Since most of the current synchronization implementations use chaotic systems that satisfy the so-called global Lipschitz condition, Lin Wei [2] proposes a chaotic system adaptive synchronization strategy which can only satisfy the local Lipschitz condition or premise even if the chaotic system is unbounded of. However, unknown parameters and uncertain nonlinear functions can not be considered simultaneously.
Therefore, this paper takes a general chaotic system as an example, assuming that the parameters of the response system are known, but there are unknown parameters and uncertain nonlinear functions in driving the chaotic system. A new robust adaptive synchronization controller for uncertain chaotic systems is designed based on Lyapunov stability theory. It is worth noting that chaotic systems do not need to satisfy the Lipschitz condition. [3-5].
Problem Description
Consider the two chaotic systems, where the parameters of the response system are known, the drive system with unknown parameters and nonlinear functions can be written as:
The driven system model can be written as
( ) ( ) ( , )
x x x
x f x F x x t (1) The response system can be written as
( )
y
y f y bu (2) Take a three dimension system as a example, the main driven system can be written as
1 1
1 1 1 4 1 1 4 1 1
1 1
( , , ) ( , , ) ( , )
p q
x x j x j x j
j j
x f x x F x x x t
(3)2 2
2 2 1 4 2 1 4 2 2
1 1
( , , ) ( , , ) ( , )
p q
x x j x j x j
j j
x f x x F x x x t
1 1
j j
And the slave response system can be written as
1 y1( ,1 , 4) 1 1
y f y y b u (6)
2 y2( ,1 , 4) 2 2
y f y y b u (7)
3 y3( ,1 , 4) 3 3
y f y y b u (8) where x is unknown parameter and x is unknown nonlinear function, so the number of unknown parameters is n p* 1, and the number of nonlinear function is n p* 2[6-8].
The objective of synchronization problem of chaotic system with unknown parameters and uncertain nonlinear functions is to design a control law uu x y( , , , )ˆ ˆq , ˆ f x y( , , )ˆ ,
ˆ ( , , )ˆ
q f x y q such that the state of response system can track the state of driven system, then it
means yx.
Assumption
Assumption 1: The response system has the same structure and dimensions as the drive system xi yi
f f .
Assumption 2: Some parts of the drive system are known, such as Fxij and fxi.
Assumption 3: The nonlinear of the drive system satisfies following conditions for 1 i n, 2
1 j p , there is an unknown constant q*ij dij.
* ( , ) ( ) xij X t qijij X
(9) where dij is a known constant and ij( )X is a known positive smooth function [9-13].
Robust Adaptive Control Law Design
Define the error variable as zi yi xi, the above drive - response system can be transformed as an error response of system
1 2
1 4 1 4
1 4
1 1
( , , ) ( , , )
( , , ) ( , )
i yi xi
p p
xij xij xij i i
j j
z f y y f x x
F x x x t b u
(10)The control law can be designed as follows.
1 2
2 1 4 1 4
1 4
1 1
( )[ ( , , ) ( , , )
ˆ ˆ
( , , ) ( ) ( )]
i i yi xi
p p
xij xij ij ij zi i
j j
u f x f y y f x x
F x x q x f z
(11)where
1 2i( ) i
f x b (12)
1/ 3 2 / 3
1 2 3 4
1
3
( ) exp( ) ( )
2
i
zi i i i i i i i i i
i i
z
f z k z k k z z k sign z
z
Then:
1 2
1 4
1 1
ˆ
[ ( ) ( , , ) { ( ) ( , )}]
p p
i i i zi i xij xij ij ij xij
j j
z z z f z F x x q x x t
(16)ˆ xij xij xij
(17) Considering that
2 2
2
* * *
1 1
*
1
ˆ ˆ
{ ( ) ( , )} { ( ) ( )}
ˆ
{ ( )[ ( ) ]}
p p
i ij ij xij i ij ij ij i ij
j j
p
i ij i ij ij j
z q x x t z q x q z x
z x sign z q q
(18)Choose a Lyapunov function as
1 2
2 2 2
1 1 1 1 1
1 1
( ) ( )
2 2
p p
n n n
i xij ij
i i j i j
V z q
(19)It is easy to get
1
( ) 0
n
i zi i i
V z f z
(20)Numerical Simulation
Take the 4D system as an example
1 ( 2 1) lb 4cos 2
x a x x k x x (21)
2 1 1 3 lb(1 sin( 2 3)) 2
x bx kx x k x x x (22)
2
3 3 1 lb 2 cos( 1 2 3 4)) 1
x cx hx k ( x x x x x (23)
4 1 lb 3(3 sin( 1 3))
x dx k x x x (24) where a b c d, , , are unknown parameters. The assumption conditions that uncertain nonlinear functions satisfy are the same as above. The structure of response system is known. Its model is shown as below:
1 y( 2 1) 1
y a y y u (25)
2 y 1 1 3 2
y b y ky y u (26)
2
3 y 3 1 3
y c y hy u (27)
4 y 1 4
y d y u (28) System parameters are set as ( , , ,a b c dy y y y) (9,39, 2.4, 10.5) . The initial states of drive system are
set as ( , , , ) (1, 1, 2, 2)x x x x1 2 3 4 . And the initial states of response system are set as 1 2 3 4
( ,y y y y, , ) ( 3,3, 5,5) .
2 y 1 1 1 3 { 1 1 1 3 lb(1 sin( 2 3)) }2 2
e b y k y y bx k x x k x x x u (30)
2 2
3 y 3 1 { 3 1 lb 2 cos( 1 2 3 4)) }1 3
e c y hy cx hx k ( x x x x x u (31)
4 y 1 { 1 lb 3(3 sin( 1 3))} 4
e d y dx k x x x u (32) The designed control law is as follows
1 2
1 4 1 4
1 4
1 1
[ ( , , ) ( , , )
ˆ ˆ
( , , ) ( ) ( )]
i yi xi
p p
xij xij ij ij zi i
j j
u f y y f x x
F x x q x f z
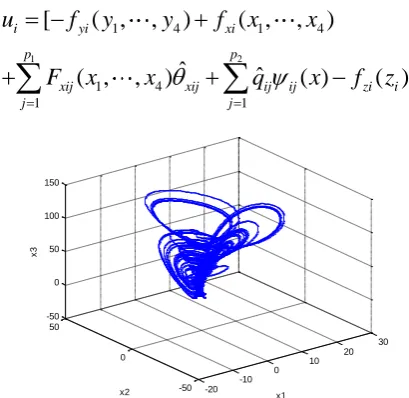
(33)-20 -10
0 10
20 30
-50 0 50 -50 0 50 100 150
x1 x2
x3
-60 -40
-20 0
20 40
-50 0 50 100 150 -400 -200 0 200 400
x2 x3
[image:4.595.66.521.29.587.2] [image:4.595.75.280.208.407.2]x4
Figure 1. Trajectory of uncontrolled chaotic systems (1). Figure 2. Trajectory of uncontrolled chaotic systems (2).
-20 -10
0 10
20
-40 -20 0 20 40
0 20 40 60 80 100 120
y1 y2
y3
-40 -20
0 20
40
-50 0 50 100 150 -100 -80 -60 -40 -20 0
t x1
y4
Figure 3. Trajectory of uncontrolled chaotic systems (3). Figure 4. Trajectory of uncontrolled chaotic systems (4).
[image:4.595.321.500.272.409.2] [image:4.595.95.503.449.581.2]0 2 4 6 8 10 12 -25 -20 -15 -10 -5 0 5 10 15 20 t x 1 & y 1
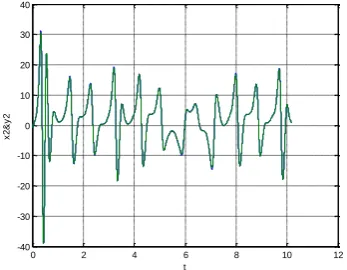
0 2 4 6 8 10 12
[image:5.595.84.497.64.418.2] [image:5.595.328.498.79.216.2]-40 -30 -20 -10 0 10 20 30 40 50 t x 2 & y 2
Figure 5. Trajectory of state x1 and y1. Figure 6. Trajectory of state x2 and y2.
0 2 4 6 8 10 12
-20 0 20 40 60 80 100 120 140 t x 3 & y 3
0 2 4 6 8 10 12
[image:5.595.93.264.80.216.2]-350 -300 -250 -200 -150 -100 -50 0 50 100 150 t x 4 & y 4
Figure 7. Trajectory of state x3 and y3. Figure 8. Trajectory of state x4 and y4.
Using the proposed method, states of response chaotic system can track the state of driven system. The synchronization of each state can be seen from Figure 9 to Figure 12.
0 2 4 6 8 10 12
-15 -10 -5 0 5 10 15 20 25 t x 1 & y 1
0 2 4 6 8 10 12
[image:5.595.317.491.452.587.2]-40 -30 -20 -10 0 10 20 30 40 t x 2 & y 2
Figure 9. Tracing curve of state x1. Figure 10. Tracing curve of state x2.
0 2 4 6 8 10 12
-20 0 20 40 60 80 100 120 140 t x 3 & y 3
0 2 4 6 8 10 12
-350 -300 -250 -200 -150 -100 -50 0 50 t x 4 & y 4
[image:5.595.102.271.455.611.2] [image:5.595.98.269.622.761.2] [image:5.595.318.492.623.761.2]used to achieve fast synchronization of drive system and response system.
Conclusion
A robust adaptive synchronization strategy is proposed to solve the synchronization problem of two chaotic systems. An adaptive strategy is used to solve unknown parameters. The law of updating is designed by constructing a Lyapunov function. The adverse effects caused by the uncertain nonlinear functions deal with robust methods. Finally, a detailed numerical simulation was conducted to verify the correctness of the proposed method.
References
[1] Rongwei Guo, A simple Adaptive Controller for chaos and hyperchaos synchronization, Physics Letters A, 360 (2009) 38-53.
[2] Wei Lin, Adaptive chaos control and synchronization in only locally Lipschitz systems, Physics Letters A, 372 (2008) 3195-3200.
[3] Pecora LM, Carroll TL. Synchronization in chaotic systems. Phys Rev Lett 1990, 64:821-4. [4] Liu F, Ren Y, Shan X, Qiu Z. A linear feedback synchronization theorem for a class of chaotic systems. Chaos, Solitons &Fractals 2002, 13:723-30.
[5] Chen M, Han Z. Controlling and synchronizing chaotic Genesio system via nonlinear feedback control. Chaos, Solitons &Fractals 2003, 17:709-16.
[6] Lian KY, Liu P, Chiang TS, Chiu CS. Adaptive synchronization design for chaotic systems via a scalar driving signal. IEEE TransCirc Syst I 2002, 49:17-25.
[7] Agiza HN. Chaos synchronization of Lu¨ dynamical system. Nonlinear Anal TMA 2004, 58:11-20.
[8] Park JH, Kwon OM. LMI optimization approach to stabilization of time-delay chaotic systems. Chaos, Solitons & Fractals 2005, 23:445-50.
[9] Lu JH, Zhou TS, Zhang SC. Chaos synchronization between linearly coupled chaotic systems. Chaos, Solitons & Fractals 2002, 14:529-41.
[10] Alexeyev AA, Shalfeev VD. Chaotic synchronization of mutually coupled generators with frequency-controlled feedback loop. Int J Bifurcat Chaos 1995, 5: 551-7.
[11] Itoh M, Yang T, Chua LO. Conditions for impulsive synchronization of chaotic and hyperchaotic systems. Int J Bifurcat Chaos 2001, 11:551-6.
[12] Kilic R. Experimental study on impulsive synchronization between two modified Chua’s circuits. Nonlinear Anal RWA 2006; 7:1298-303.