http://dx.doi.org/10.4236/am.2014.51014
Solving Nonlinear Stochastic Diffusion Models with
Nonlinear Losses Using the Homotopy Analysis Method
Aisha A. Fareed1, Hanafy H. El-Zoheiry2, Magdy A. El-Tawil2, Mohammed A. El-Beltagy3, Hany N. Hassan1
1Department of Basic Sciences, Engineering Faculty, Benha University, Benha, Egypt
2Department of Engineering Mathematics & Physics, Engineering Faculty, Cairo University, Cairo, Egypt 3Department of Electrical & Computer Engineering, Engineering Faculty, Effat University, Jeddah, KSA
Email:
Received October 22, 2013; revised November 22, 2013; accepted November 29,2013
Copyright © 2014 Aisha A. Fareed et al. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. In accor- dance of the Creative Commons Attribution License all Copyrights © 2014 are reserved for SCIRP and the owner of the intellectual property Aisha A. Fareed et al. All Copyright © 2014 are guarded by law and by SCIRP as a guardian.
ABSTRACT
This paper deals with the construction of approximate series solutions of diffusion models with stochastic excita- tion and nonlinear losses using the homotopy analysis method (HAM). The mean, variance and other statistical properties of the stochastic solution are computed. The solution technique was applied successfully to the 1D and 2D diffusion models. The scheme shows importance of choice of convergence-control parameter ħ to guarantee the convergence of the solutions of nonlinear differential Equations. The results are compared with the Wien- er-Hermite expansion with perturbation (WHEP) technique and good agreements are obtained.
KEYWORDS
HAM Technique; WHEP Technique; Stochastic PDEs; Diffusion Models
1. Introduction
The deterministic differential equations of the form x t
a t x t
constitute the basic form of so-called dif-fusion or transport problems which appear in relevant models such as: the growth population geometric (or Malthusian) model in biology, where a t
represents the per capita growth rate; the neutron and gamma ray transport model in physics, where coefficient a t
involves the geometry of the cross-sections of the medium; the continuous composed interest rate models for studying the evolution of an investment under time-variable interest rate ( )r t which can be taken as a t
1 r t
, etc. Despite the usefulness of these basic models, they do not often cover all possible situations observed from a practical point of view. In fact, as a simple but il- lustrative example, if a t
a 0, the Malthus model predicts unlimited growth of a species despite the fact that resources are always limited. Then, the logistic (or Verhulst) model introduces a nonlinear term in order to overcome this drawback by considering the differential equation x t
a t x t
bx t
2, ,a b0, where the nonlinearity intensity is given by parameter b. In many practical situations it is appropriate to assume that the nonlinear term affecting the phenomena under study is small enough; then its intensity is controlled by means of a frank small parameter, say . Stochastic differential equations based on the white noise process provide a powerful tool for dynamically modeling these complex and uncertain aspects. Over the last few years, new and relevant methods for finding the exact solutions of such Equations have been developed. They include the homotopy perturbation (HPM) method [1,2], Wiener-Hermite expansion with perturbation method (WHEP Cortes [2011]) [3] and the exp-function method [4,5].lem, [7]. The HAM provides a more viable alternative to non perturbation techniques such as the Adomian de- composition method (ADM) [8] and other techniques that cannot guarantee the convergence of the solution se- ries and may be only valid for weakly nonlinear problems, [7]. We note here that He’s HPM method, [9] is only a special case of the HAM. In recent years, this method has been successfully employed to solve many problems in science and engineering such as the viscous flows of non-Newtonian fluids [10,11], the KdV-type equations [12], Glauert-jet problem [13], Burgers-Huxley equation [14], time-dependent Emden-Fowler type equations [15], differential-difference equation [16], two-point nonlinear boundary value problems [17]. The HAM pro- vides the solution in the form of a rapidly convergent series with easily computable components using symbolic computation software such as Mathematica.
This paper deals with the solution of 1D stochastic differential models of the form
2
0
; , 0,
0
x t a t x t x t n t t
x x
(1)
where the diffusion coefficient a t
and initial condition x0 are deterministic, is a small parameter and
;n t is the white noise process, whose intensity is given by parameter , which has the following impor- tant properties:
1
2
1 2
; 0; ;
E n t
E n t n t t t
where E denotes the ensemble average operator, is the Dirac delta function. And is a random outcome for a triple probability space
, ,A p
, where is a sample space, A is a -algebra associated with and P is a probability measure. The current work also deals with the solution of 2D stochastic quadratic nonli- near equation with n x
;
as non-homogeneity.
2 2 2 , ;
;
, 0, 0, ,
,0 0, , 0 and 0, .
u t x u
u n x
t x
t x l
u t u t l u x x
(2)
where u t x
, ;
is the diffusion process, is a deterministic scale for the nonlinear term. The non-homo- geneity term n x
;
is spatial white noise scaled by .The paper is organized as follows. Section 2 summarizes the basic idea of the HAM method. In Section 3, the HAM is applied in order to obtain fourth order approximation of the solution of 1D diffusion model. In Section 4, the HAM is applied up to the third order approximation for the solution of 2D diffusion model. In addition, we compute approximations for the main statistical moments such as the mean and variance. A comparison is done with the results obtained with the (WHEP Cortes [2011], WHEP El-Beltagy [2013]) technique [4,5]. The results are shown in Section 5 along with comments on the results.
2. The Basic Idea of HAM
A presentation of the standard HAM for deterministic problems can be found in [9]. The following subsection is a brief description of HAM. Consider the following differential equation:
, 0N u t x (3)
where N is a nonlinear operator and u t x
, is the unknown function. By means of generalizing the traditional HPM method, Liao [6] constructs the so-called zero-order deformation equation
1q L
t x q, ;
u t x0
, q H t x N
,
t x q, ;
, (4) where q
0,1 denotes the so-called embedding parameter, 0 is an auxiliary parameter and L is an aux- iliary linear operator.function, u t x0
, is an initial guess for u t x
, , and H t x
, denotes a non-zero auxiliary function. It is ob- vious that when the embedding parameter q0 and q1, Equation (3) becomes
t x, ;0
u t x0
, , t x, ;1
u t x, , (5)
respectively. Thus as q increases from 0 to 1, the solution
t x q, ;
varies from the initial guess u t x0
, to the solution u t x
, . In topology, this kind of variation is called deformation; Equation (3) constructs the ho- motopy
t x q, ;
.Having the freedom to choose the auxiliary parameter , the auxiliary function H t x
, , the initial ap- proximation u t x0
, , and the auxiliary linear operator L, we can assume that all of them are properly chosen so that the solution
t x q, ;
of the zero-order deformation Equation (4) exists for 0 q 1.Expanding
t x q, ;
in Taylor series with respect to q, one has,
0
1
, ; , , m,
m m
t x q u t x u t x q
(6)where
0 , ; 1
, !
m
m m
q
t x q u t x
m q
(7)
Assume that the auxiliary parameter , the auxiliary function H t x
, , the initial approximation u t x0
, and the auxiliary linear operator L are so properly chosen that the series (6) converges at q1 and
0
1
, ;1 , m , ,
m
t x u t x u t x
(8)which must be one of the solutions of the original nonlinear Equation, as proved by Liao [9]. As 1,
andH t x
, 1, Equation (4) becomes
1q L
t x q, ;
u t x0
, qN
t x q, ;
0, (9) This is mostly used in the HPM method. According to definition (8), the governing equation and the corresponding initial condition of u t xm
, can be deduced from the zero-order deformation Equation (4). Define the vector
,
0
, , 1 , , 2 , , ,
,
.n t x u t x u t x u t x u t xn
u
Differentiating Equation (4) m times with respect to the embedding parameter q and then setting q0 and finally dividing them by m!, we have the so-called mth-order deformation equation:
, 1
,
,
1
; 1m m m m
L u t x u t x H t x R u m (10)
where
1
1
1
0
, ; 1
, 1 !
m
m m
q
N t x q R u
m q
and
0 when 1 , 1 otherwise m
m
(11)
The solution is computed as:
0
, i , .
i
u t x u t x
software such as Mathematica, Maple, or Matlab.
3. Application to the 1D Diffusion Model
To demonstrate the above presented method it will be used to find the mean and variance of 1D stochastic diffu- sion problem as follows.
The auxiliary linear operator will be chosen as
; d
; dt q L t q
t
Furthermore, we define the nonlinear operator as
d
;
2
; ; ; ;
d
t q
N t q a t t q t q n t
t
We construct the zero-order deformation equation,
1q L X
m
t mXm1
t q H t R X
m1
.The mth-order deformation equation for m1 and H t
1 is
1
1
,m m m m
L X t X t R X (12) Subject to the initial condition
0 0, mX
where
1
1
1 1
0
d
1 ;
d
m m
m m i i m
i
X t
R a t X t X t X t n t
t
X
Now the solution of the mth-order deformation Equation (12) for m1 becomes
1
1
1 1
0
d ,
1 d
m m
m m m m i i m
i
X t x
L X t X t a t X t X t X t n t
t
The first order approximation is obtained by setting m1 in (12) as follows
1 0
L X t R X
where
0
2
0 0
d d X t
R a t X t X n t
t
X
Then
0
2
1 0 0
d
, d
X t
L X t a t X t X t n t
t
0
2
1 0 0
0
d
d , d
t X t
X t a t X t X t n t t
t
The ensemble average of the first order approximation is
0 2
1 0 0
0 1
d
d , d
0.2475
t E X t
E X t a t E X t E X t t
t
E X t t
The covariance of the first order solution will be
1 2 2 1
2 1 1
1 1 1 2 1 1 1 1 1 2 1 2
2 2
1 1 2 2 1 2 1 2
0 0 0 0
2 2 2 2 2
1 2 1 2 1
0 0 0
2 1
Cov ,
d d d d
d d d
t t t t
t t t
X t X t E X t EX t X t EX t
E n t t n t
t
t E n t n t t t
t t t t t
The variance of the first order solution will be
22
2 2
1 1 1
0
Var d
t
X t E X t EX t E n t t t
In this manner, we can have more results of E X m
t and VarXm
t obtained at m2,3, 4, The final expression of the mean of the 4th order solution will be
4 0
2
3 2 4 2 3
0.5 0.99 1.4849 0.3638
0.99 0.4951 0.0394123125 0.2475 0.1869 0.0298 0.0012
M i i
t t t
t t t t t t t
E X t E X t
Since
1
N i i
X t X t
Then the final expression of the variance of the 2nd order solution will be
2 2 2
1 1 1
1 2 1 1 2 2
4. 4. 1.714
Var Var Cov , Var
Var Var 2Co
9 1. 0.735 0
v ,
.12
Var
N N N N
i i i j
i i i j i
X t X t X t X t X t
X t X t X t X t X t
h t h t h t t
4. Application to the 2D Diffusion Model
HAM will be used to find mean and variance of stochastic quadratic nonlinear diffusion problem as follows. The auxiliary linear operator is chosen as
2
2
, ; , ;
, ; t x q t x q
L t x q
t x
We have many choices in guessing the initial approximation together with its initial conditions which greatly affects the consequent approximation .The choice u0 is a design problem which can be taken as follows:
0
0
0
π
, e sin
2 π
sin d
nt
n n
n
n
u t x B x
n
B x x x
(13)
One can notice that the selected value function satisfies the initial and boundary conditions and it depends on the parameter n which is totally free. One can also notice that n selection could control the solution convergence.
Furthermore, we define the nonlinear operator as
2
2
2
, ; , ;
, ; t x q t x q , ; ;
N t x q t x q n x
t x
We construct the zero-order deformation Equation,
1q L u t x
m
, m mu 1
t x, q H t x R u
, m1
. The mth-order deformation Equation for m1 and H t x
, 1 is
, 1
,
1
,m m m m
L u t x u t x R u
And subject to the boundary conditions
,0 0,
, 0m m
u t u t l
And the initial condition
0, 0, mu x
where
1
2 1
1
1 2 1
0
, ,
, , 1 ; .
m
m m
m m i i m
i
u t x u t x
R u t x u t x n x
t x
uNow the mth-order deformation equation for m1 becomes
1
2 1
1
1 2 1
0
, ,
, , m m m , , 1 ; .
m m m m i i m
i
u t x u t x
L u t x u t x u t x u t x n x
t x
The first order approximation is obtained by substituting m1 to get
0
2 0
2
1 2 0
, ,
, u t x u t x ; .
L u t x u n x
t x
(14)
The approximated first order solution of (14) can be obtained using Eigen function expansion as follows,
2 1 ,1 0 π ,1 ,1 0 20 0 2
,1 2 0
0 π , sin where e d , ,
2 ; sin π d ,
n n n t t n n n n
u t x I t x
I t F
u t x u t x n
F t u n x x x
t x
the ensemble average of the first order approximation is
2 2 2 2 1 ,1 0 π ,1 ,1 0π π 2
π
2
0 0 2
,1 2 0 1
0 2 3 π , sin where e d , ,
2 sin π d
e 3 1 e π π 2 8 8e sin π
,
.
3 π 2π
n n
n
t t
t n t n
n L t n n n
u t x E I t x
E I t E F
u t x u t x n
E F t u x x
h n x
n
u t x
The covariance of the first order solution can be computed as
1 1 1 2 1 1 1 1 1 2 1 2
,1 ,1 1 ,1 ,1 2
1 1
Cov , , , , , , ,
π π
sin sin .
n n m m
n m
u t x u t x E u t x Eu t x u t x Eu t x
n m
E I t EI t x I t EI t x
The covariance is obtained from the following final expression
2 2 1 2 21 1 1 2
π π
2 2
1 2 1 2
2
1 1 0 0 0
1
2
π 2
4 1 1 2
Cov , , ,
4 π π π π
sin sin sin sin d e e d d
2 1 e sin π1 sin π 2
.
π
Cov , , ,
n m
t t t t
n m
t
u t x u t x
n m n m
x x x x x
u t x u t x h x x
The variance of the first order solution will be computed as
2
21 1 1 ,1 ,1
1
π
Var , , , n n sin .
n
n
u t x E u t x Eu t x E I t EI t x
(15)To give
2
2 2
1 2
π π
2 2
1 2 1 2
1 1 0
2 2
π 2
4
0 0
4 π π π π
Var , sin sin sin sin d
2 1 e sin
e d d
π
π
e
.
n m
t t t t
m
t n
n m n m
u t x x x x x x
h x
In this manner, we can have more results of E u t x m
, and Varu t xm
, obtained at m2,3, 4, The final expression of mean of the 3rd order solution will be
2 2 2 2 0 0π π 2
π 2
3
π 2 2 2
1 2 3
2 2
, ,
, , , , ,
6e 3 1 e π π 2 8 8e
1 (9e
9 π 2π
e 128 π 3 9π π 2 7
,
2π
16 3
t n t n
t t M m m n t E u h n n
h n n
t x E u t x
E u t x u t x E u t x E u t x E u t x
E u n x n t n
2 2 2 π 23 2 2
π
π 2 2 3
2 2 2
π 6π 8 e 128e π 3
9e π π 2 72e π 16 3π 6π 8
π π 2 π 3 sin π .
t n
t n
t n
t
n n n
n n n n
n n n x
Since
1
, N i , .
i
u t x u t x
1 1 1
1 2
2 2 2
8
2
2
1
Var , Var , Cov , , ,
Var , Var , Var , 2Cov ,
4. 4. 1.7149 1. 0.735 0.12
1 4 sin π , , Var , Var ,
N N N N
i i i j
i i i j i
u t x u t x u t x u t x
u t x u t x u t x u t x u
h t h t h t t
t x u x u h t t x
22 2 2
2 2
2
2 2 2
2
2
2 π 4
2 2
2 2π 3 π 2 π
π π
π 3
2
2π π 2 π 2
2
2 2
4 π 2
π 3 1 e π
1 π 2e π 2 1 e π 2 1 e
1 e 1 e π 1 e π
1
2e π 4 1 e π 1 e π
π
16e 1 e
1 e e 1 e
t
t t t
t n t n
t
t t t
t n
t n t n t
x n n t h t n n h n
π2 2
2 2
2 2 si π π n . πt t x
5. Result Analysis
5.1. 1D Diffusion Model Results
Figures 1 and 2show the plots of the -curves for the fourth order variance and mean approximations respec- tively for different values of time t at a t
1 2, 1, 102 and0 0.5
x on the time interval [0,2]. According to these -curves, it is easy to discover that the valid region of is a horizontal line segments, thus 0.92 Figures 3and 4 show the comparison of the expectation and variance as a function of time us-
ing HAM and WHEP which uses the Wiener Hermite expansion and perturbation technique to solve a class of nonlinear partial differential Equations with a perturbed nonlinearity “techniques and good agreement is ob- tained.
The mean and variance results of the WHEP technique are obtained from [5] as:
2 2 2 0
0 2
2 2 2
2 2 3
0
2 0 2
2 3
e 1 e 2
e
2
Var e 1 2 e 1 e 1 2 e 1 e 1
2
at at
at
at at at at at
a x E x t x
a
x x
x t
a a a
The effect of on the variance is shown in Figure 5. The variance is plotted with time for different values
of . The peak variance decreases in magnitude with the increase of . Also, the time of the peak variance decreases with the increase of .
5.2. 2D Diffusion Model Results
In the following figures, results of the solution of 2D stochastic quadratic nonlinear diffusion model using HAM
technique are shown at 1,1,n 1,
π
1, 1, sinn
n x x
[image:8.595.146.477.77.373.2] .
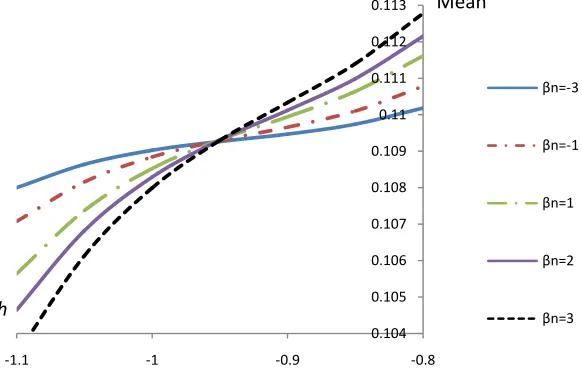
Figure 6 shows the Plot of -curve of third order approximation of mean for different values of time t and
space variable x at 1,1,n 1,1,
π
1, sinn
n x x
0 5 10 15 20 25 30
‐3 ‐2.5 ‐2 ‐1.5 ‐1 ‐0.5 0
t=.1
t=.5
t=1
t=1.5
t=2
Variance
[image:9.595.178.451.83.287.2]h
Figure 1. The change of variance of the solution X t
with parameter at different t values.0.5 0.6 0.7 0.8 0.9 1 1.1 1.2 1.3 1.4
‐2 ‐1.5 ‐1 ‐0.5 0
t=.1
t=.5
t=1
t=1.5
t=2
Mean
[image:9.595.159.465.322.522.2]h
Figure 2. The change of mean of the solution X t
with parameter at different t values.0.5 0.6 0.7 0.8 0.9 1 1.1 1.2
0 0.5 1 1.5 2
Homotopy‐Analysis Wiener‐Hermite
Mean
time
[image:9.595.180.445.555.712.2]0 1 2 3 4 5 6
0 0.5 1 1.5 2
Homotopy‐Analysis
Wiener‐Hermite
Variance
[image:10.595.170.433.85.253.2]time
Figure 4. Comparison of and the variance obtained by using HAM method at 0.92 for the 1D and WHEP [18].
0 1 2 3 4 5 6
0 0.5 1 1.5 2
Ɛ=.01
Ɛ=.1
Ɛ=.35
Ɛ=.5
Ɛ=.9
Variance
[image:10.595.140.446.283.712.2]time
Figure 5. The effect of on Var[x(t)].
‐1.5
‐1
‐0.5 0 0.5 1
‐2 ‐1.5 ‐1 ‐0.5 0 0.5
t=.1,x=.3
t=.3,x=.2
t=.4,x=.5
t=.5,x=.4
t=.2,x=.3
Mean
h
third order approximation of mean for different n values. According to these -curves, it is easy to discover that the valid region of is a horizontal line segments, thus 0.96. Figures 8 and 9 show the plot of
mean and variance with time for different values.
Figure 10shows the comparison between the mean of the first, the second and the third order approximations. Figure 11 shows the comparison between the variance of the first and second order approximations.
6. Conclusion
This paper shows that the HAM technique constitutes a powerful tool for constructing approximate solutions for the stochastic process for random diffusion models with nonlinear perturbations where uncertainty is considered by means of an additive term defined by white noise. The HAM method is employed to give a statistical analytic solution for stochastic 1D and 2D diffusion models. Different from all other analytic methods, the HAM pro- vides us with a simple way to adjust and control the convergence region of the series solution by means of the auxiliary parameter ħ. Thus the auxiliary parameter ħ plays an important role within the frame of the HAM which can be determined by the so called ħ-curves. The solution obtained by means of the HAM is an infinite power series for appropriate initial approximation, which can be, in turn, expressed in a closed form. The accu- racy for the method is verified on 1D diffusion model by comparisons with WHEP technique and good agree- ments are obtained. As shown inFigures 1and 2, we can see that the valid ħ region in the 1D example is −0.9
< < −1.4 and in 2D example the interval is −0.9 < < −1.1, as shown inFigure 6. The results demonstrate
reliability and efficiency of the HAM method. Since HAM was used to solve only deterministic problems, we
0.104 0.105 0.106 0.107 0.108 0.109 0.11 0.111 0.112 0.113
‐1.1 ‐1 ‐0.9 ‐0.8
βn=‐3
βn=‐1
βn=1
βn=2
βn=3
Mean
[image:11.595.161.452.335.519.2]h
Figure 7. The change of the mean u with parameter at different βn values, 1, t = x = 0.1.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
0 0.1 0.2 0.3 0.4 0.5
Ɛ=.01
Ɛ=.1
Ɛ=.4
Ɛ=.7
Ɛ=1
Mean
time
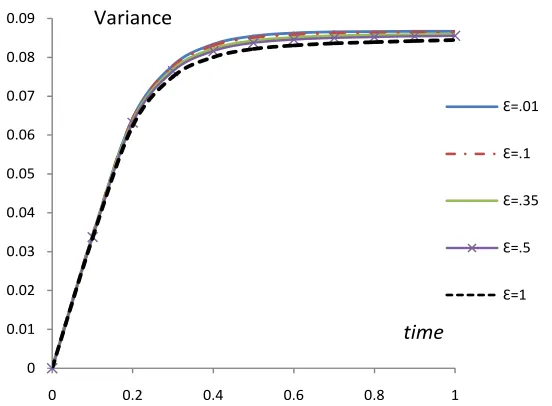
[image:11.595.191.404.554.716.2]0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09
0 0.2 0.4 0.6 0.8 1
Ɛ=.01
Ɛ=.1
Ɛ=.35
Ɛ=.5
Ɛ=1
Variance
[image:12.595.165.441.82.285.2]time
Figure 9. The change of the variance u with time t at different values, x = 0.1, βn 1, 0.96.
‐0.2 0 0.2 0.4 0.6 0.8 1
0 0.1 0.2 0.3 0.4 0.5
mean‐u1 mean‐u2 mean‐u3
Mean
[image:12.595.196.441.315.482.2]time
Figure 10. Mean comparison between first u1, second u2 and third order u3 approximations with time t at, x = 0.1,
1
n
β , 0.96.
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08
0 0.2 0.4 0.6 0.8 1
var‐u1 Var‐u2
Variance‐
time
Figure 11. Variance comparison between first and second approximations u1, u2 with time t at, x = 0.1, βn 1,
0.96
[image:12.595.189.422.527.704.2]can say that this is the first time to apply HAM method on stochastic problems and we found that it’s easier than WHEP and more general than HPM since HPM is a special case of HAM obtained at 1 and its results is accurate.
REFERENCES
[1] M. A. El-Tawil and A. S. Al-Jihany, “On the Solution of Stochastic Oscillatory Quadratic Nonlinear Equations Using Different Techniques, a Comparison Study,” Topological Methods in Nonlinear Analysis, Vol. 31, No. 2, 2008, pp. 315-330.
[2] M. A. El-Tawil and N. A. Al-Mulla, “Using Homotopy WHEP Technique for Solving A Stochastic Nonlinear Diffusion Equa- tion,” Mathematical and Computer Modelling, Vol. 51, No. 9, 2010, pp. 1277-1284.
[3] J. C. Cortes, J. V. Romero, M. D. Rosello and C. Santamaria, “Solving Random Diffusion Models with Nonlinear Perturbations by the Wiener-Hermite Expansion 617 Method,” Computers & Mathematics with Applications, Vol. 61, No. 8, 2011, pp. 1946-1950.
[4] C. Q. Dai and J. F. Zhang, “Application of He’s Exp-Function Method to the Stochastic mKdV Equation,” International Jour- nal of Nonlinear Sciences and Numerical Simulation, Vol. 10, No. 5, 2009, pp. 675-680.
[5] M. El-Beltagy and M. El-Tawil, “Toward a Solution of a Class of Non-Linear Stochastic Perturbed PDEs Using Automated WHEP Algorithm,” Applied Mathematical Modeling, Vol. 37, No. 12-13, 2013, pp. 7174-7192.
[6] S. J. Liao, “The Proposed Homotopy Analysis Technique for the Solution of Nonlinear Problems,” Ph.D. Thesis, Shanghai Jiao Tong University, Shanghai, 1992.
[7] S. J. Liao, “Notes on the Homotopy Analysis Method: Some Definitions and Theories,” Communications in Nonlinear Science Numerical Simulation, Vol. 14, No. 4, 2009, pp. 983-997.
[8] G. Adomian, “A Review of the Decomposition Method and Some Recent Results for Nonlinear Equations,” Computers and Mathematics with Applications, Vol. 21, No. 5, 1991, pp. 101-127.
[9] J. H. He, “Homotopy Perturbation Method: A New Nonlinear Analytical Technique,” Applied Mathematics and Computation, Vol. 135, No. 1, 2003, pp. 73-79.
[10] T. Hayat and M. Sajid, “Analytic Solution for Axisymmetric Flow and Heat Transfer of a Second Grade Fluid Past a Stretching Sheet,” International Journal of Heat and Mass Transfer, Vol. 50, No. 1-2, 2007, pp. 75-84.
[11] S. Abbasbandy, “Soliton Solutions for the 5th-Order KdV Equation with the Homotopy Analysis Method,” Nonlinear Dynam- ics, Vol. 51, No. 1-2, 2008, pp. 83-87.
[12] Y. P. Liu and Z. B. Li, “The Homotopy Analysis Method for Approximating the Solution of the Modified Korteweg-de Vries Equation,” Chaos, Solitons and Fractals, Vol. 39, No. 1, 2009, pp. 1-8.
[13] Y. Bouremel, “Explicit Series Solution for the Glauert-Jet Problem by Means of the Homotopy Analysis Method,” Communi-cation in Nonlinear Science Numerical Simulation, Vol. 12, No. 5, 2007, pp. 714-724.
[14] A. Molabahrami and F. Khani, “The Homotopy Analysis Method to Solve the Burgers-Huxley Equation,” Nonlinear Analysis Real World Applications, Vol. 10, No. 2, 2009, pp. 589-600.
[15] S. Abbasbandy, E. Magyari and E. Shivanian, “The Homotopy Analysis Method for Multiple Solutions of Nonlinear Boundary Value Problems,” Communications in Nonlinear Science and Numerical Simulation, Vol. 14, No. 9-10, 2009, pp. 3530-3536. [16] H. N. Hassan and M. A. El-Tawil, “Solving Cubic and Coupled Nonlinear Schrödinger Equations Using the Homotopy Analy-
sis Method,” International Journal of Applied Mathematics and Mechanics, Vol. 7, No. 8, 2011, pp. 41-64.
![Figure 3. Comparison of the expectation obtained by using HAM at 0.9 for the 1D problem and WHEP [18]](https://thumb-us.123doks.com/thumbv2/123dok_us/7976117.755485/9.595.178.451.83.287/figure-comparison-expectation-obtained-using-ham-problem-whep.webp)
![Figure 5. The effect of on Var[x(t)].](https://thumb-us.123doks.com/thumbv2/123dok_us/7976117.755485/10.595.140.446.283.712/figure-effect-var-x-t.webp)