Pneumatically Driven Robot System
with Force Perception for
Minimally Invasive Surgery
Tokyo Institute of Technology
Kotaro Tadano
Daisuke Haraguchi
Kenji Kawashima
Research Overview on Surgical Robots
Univ. of Tokyo
Nagoya
Univ.
Univ. Washington
DLR
SRI
Display the sense of force to the operator is a problem
daVinci
Master-Slave Surgical Assist Robot
Named IBIS
Feature
・
Compact
Purpose
We propose a master-slave system with
multi-DOF forceps manipulators that is able to provide
a force display to operators without a force sensor
using pneumatic actuators.
Pneumatic actuators
Estimation of force by pressure
Susceptible to friction
High back drivability
Flexible due to air compressibility
High power / weight ratio
Concept of the forceps
•Effective for a haptic device due to the facility
in measurement and control of their driving force
•Enable the estimation of the external force from the
driving force and the impedance.
No sensors
Development histories of IBIS
Ver.3
IBIS III 2007
Ver.1
IBIS I
2004
Ver.2
IBIS II
2005
2004
2012
Ver.4
IBIS IV 2009
Ver.5
IBIS V
2010
2008
Forceps manipulator
Pneumatically-driven forceps manipulator with a 2-dof flexible
wrist joint
Potential of external force
estimation due to high
back-drivability
450 mm
φ10 mm
Driving part
22 mm
33 mm
flexible
joint
Gripper
Tip part
Pneumatic
cylinder x 4
Overview of the forceps manipulator
Pneumatic driving system
8
Pneumatic driving force
Position of cylinder piston
Schematic of pneumatic driving system
Developed Gripper Embedded with Pneumatic Cylinder
Fig. : Gripping Mechanism
Fig. Gripping torque vs. angle (0.6MPa)
0
4
8
12
100
200
300
θ
[deg]
τ
θ[m
Nm
]
Opening angle
of grasping a
needle
•Avoidance of interference
with the other joints
• Slider-crank mechanism driven
by a pneumatic cylinder
•Strong gripping force
using singular point
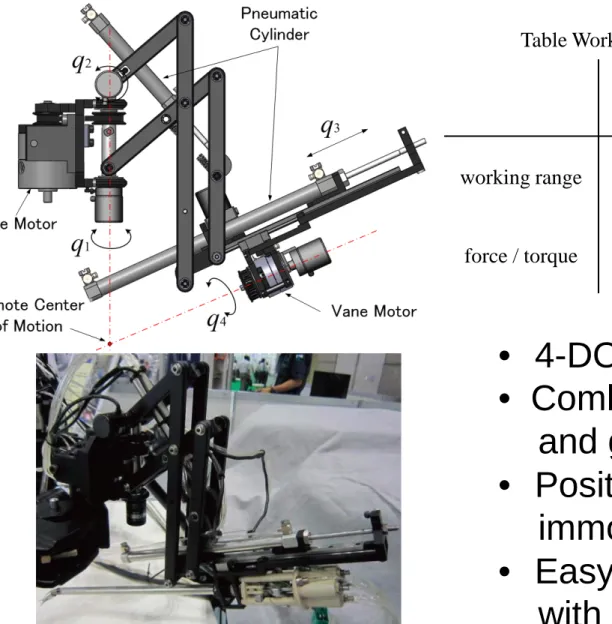
Manipulator to support forceps and scope
φ
ψ
ρ
θ
working range
±
52
°
±
50
°
±
50mm
±
120
°
force / torque
3.6Nm
5.5Nm
39N
0.14Nm
Fig. Developed manipulator for supporting forceps
Table Working range and maximum force/torque
•
4-DOF
• Combination of parallel link
and gimbal mechanism
•
Position of a trocar is
immovable mechanically
•
Easy power adjustment
with a regulator valve
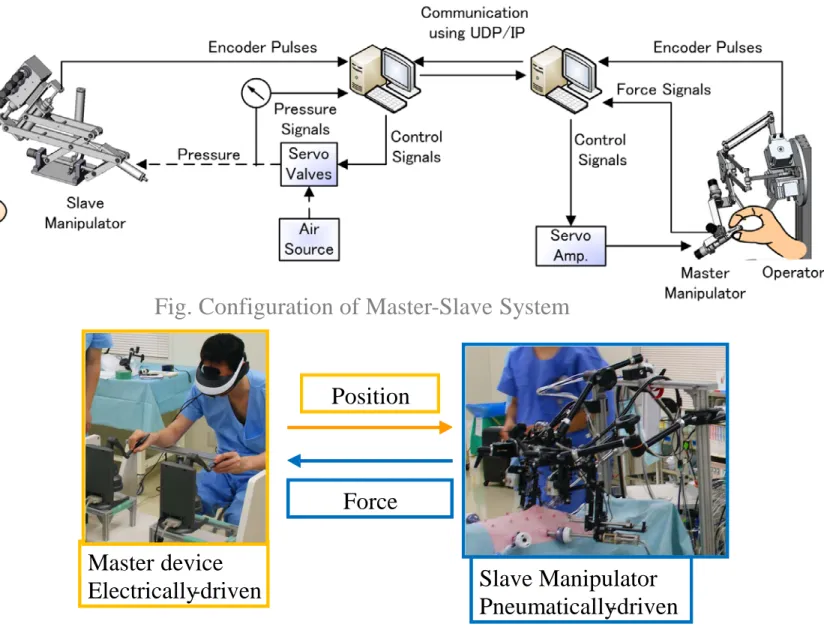
Master slave system
Fig. Configuration of Master-Slave System
Integration of Pneumatic and Electric system
Slave Manipulator
Pneumatically
-
driven
Master device
Electrically
-
driven
Position
Force
Kagawa-Kawashima Group, Precision and Intelligence Laboratory, Tokyo Institute of Technology
12
Experimental results during suturing task
Fig. Experimental results of bilateral control
M
s=0.01[kg], Bs=0.02[Ns/mm],
K
s= 0.4[N/mm]
M
m=0.4[kg],
B
m=0.005[Ns/mm]
Force between the master
and slave side agree well
Force feedback during suturing task
Effectiveness of the system is
confirmed with in vivo experiment
Laparoscope camera control system
Laparoscope control system
Advantages
1. Display of clear 3D view to the operator
2. Realize an intuitive operation
3. Contribution to safe operation with the
detection of external forces
Proposed laparoscope control system
Back and forth
To right and left
Rotation
Laparoscopic camera
3D view with HMD
Up and down
Track head
movement
System controller
•
Calculate the reference velocity at the tip of scope from
the gyro sensor on HMD
•
PD control is used to track the reference angle
Clinical trial of AeroVision
Tested with and without HMD
AeroVision worked successfully
Conclusion
• We developed slave forceps manipulator that has 6-DOFs
driven by pneumatic actuators with flexible joint.
• For the pneumatic slave manipulator, force control type of
the impedance control without force sensor was adopted.
• The bilateral control experimental results indicated that the
operator felt the force at the slave side with sensitivity of
about 0.3N.
• Effectiveness of force feedback is confirmed with ligation
experiment.
• 3D endoscope control system with gyro sensors is
developed.

![Fig. Experimental results of bilateral control Ms=0.01[kg], Bs=0.02[Ns/mm], Ks= 0.4[N/mm]](https://thumb-us.123doks.com/thumbv2/123dok_us/619090.2574228/12.1080.29.516.120.613/fig-experimental-results-bilateral-control-ms-bs-ns.webp)
