Optimized Minutiae–Based Fingerprint Matching
Neeta Nain
∗, Deepak B M, Dinesh Kumar, Manisha Baswal, and Biju Gautham
Abstract—We propose a new minutiae-based ap-proach to match fingerprint images using similar structures. Distortion poses serious threats through altered geometry, increases false minutiae, and hence makes it very difficult to find a perfect match. This algorithm divides fingerprint images into two concen-tric circular regions – inner and outer – based on the degree of distortion. The algorithm assigns weight– ages for a minutiae–pair match based on the region in which the pair exists. The implementation of the algorithm on the standard FVC DB shows robust per-formance.
Keywords: Distortion, minutiae–based structures, matching, mass–centroid concept
1
Introduction
Biometric recognition refers to the use of distinctive phys-iological (e.g., fingerprint, face, retina, and iris) and be-havioral (e.g., gait, signature) characteristics, called bio-metric identifiers or automatically recognizing individu-als. Biometrics offers reliable means of authentication, and greater security and convenience [1] than traditional methods of personal recognition; these attributes cannot be easily shared or stolen.
The existing approaches for fingerprint matching are: minutiae–based, and correlation-based. The former has several advantages over the latter such as lower time com-plexity, better space comcom-plexity, less requirement of hard-ware etc. The uniqueness of a fingerprint is due to unique pattern shown by the locations of the minutiae points – irregularities of a fingerprint – ridge endings, and bifur-cations.
The non–linear distortion in the fingerprint images makes it very difficult to handle matching as it changes the ge-ometrical position of the minutiae points. The regions, that are affected, shift the geometry of the minutiae and hence pose a potential threat to acceptance of a genuine match. The distortion is due to the pressure applied on the scanner, the static friction, the skin moisture, elastic-ity, and rotational effects etc. [2] that occur during the acquisition. On the sensor, if the force is not applied or-thogonally to the surface, elastic deformations are formed [3]. The level of distortion increases from the center to-wards the outer regions. As we move from the center,
∗Date of Submission: 9thof March, 2008. Address of the
corre-sponding author: Department of Computer Engineering, Malaviya National Institute of Technology, Jaipur–302017, India. Tele-phone/Fax No.: +91 141 2529140/+91 141 2713285
towards the boundary of a fingerprint image, the distor-tion due to rotadistor-tion, static fricdistor-tion etc. increases. In other words, the distortion is more towards the bound-aries than at the center.
Different algorithms exist that handle distortion in finger-print images. [4]–[6] are based on the distortion detection, [7]–[9] are bounding–box–based, [10]–[11] local similarity, [3] deformation model, and others [12]–[13].
[14] uses both minutiae and texture features; aligning is based on the maximum number of corresponding pairs, and matching is based on the sum of the squared dif-ferences between the feature vector. [14] method does not take into account the images with large contact area. The algorithm [3] employs a thin–plate spline model to describe non–linear distortion between the corresponding minutiae pairs. It tries to find a match, which sometimes, may be forced even if they belong to different fingerprint images hence increasing the false acceptance rate. In this paper, the algorithm employs a quick aligning stage after the extraction of the binary image. This method considers aligning the binary image by taking the mass–centroid1of the binary image, which is divided into two regions – upper and lower halves. This method is used to achieve a fast alignment and to set a reference, which gives an excellent approximation of the alignment that has to be done at a later stage using the minutiae points. When the angle of rotation to be achieved is large, this method is extremely efficient and saves a lot of time, which otherwise is spent in finding the correspondences to find an alignment. Calculating the alignment and cor-respondences between the minutiae points proves costly and time consuming especially when the translational and rotational parameters are large.
2
Algorithm
The algorithm has two stages. In the first stage, the minutiae points are extracted, and in the second stage, the aligning and the matching of the fingerprint images are done. The algorithm is designed to reduce time taken in aligning, immediately after the calculation of the bi-nary image.
2.1
Minutiae Extraction
The method proposed by Hong et al. [15] is used for efficient minutiae extraction. The so obtained thinned
binary image is used to extract the minutiae points using the crossing number method [17]–[19]. P is the set of minutiae points so obtained.
Even after the efficient extraction of the thinned binary image, there may be a few false minutiae. This is due to the amount of noise, moisture on the finger, dust on the scanner etc. About 10% of the images that are acquired are of poor quality [15]. The next stage is to eliminate the false minutiae from the set P. If not eliminated, the false minutiae aid the increase in false acceptance rate. The algorithm employs the method described in [16] to eliminate the false minutiae. It is observed that the genuine minutiae points are quite far away from one another. False minutiae points seem to accumulate very closely.
2.2
Region separation and alignment
The region separation and the optimized alignment stage make this algorithm novel. The fast alignment is sought as an approximate alignment stage, and the region sep-aration is devised in order to handle the non–uniform distortion.
2.2.1 Fast alignment—an optimization
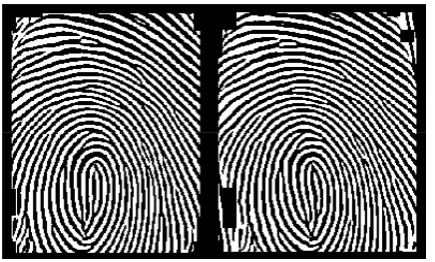
[image:2.595.312.530.45.176.2]The devised algorithm has a fast alignment stage after the extraction of the binary image. It is based on the mass–centroid concept which uses the non–minutiae fea-tures. The algorithm divides the binary image horizon-tally into two halves – upper and lower. The centroid for the black pixels is calculated for each such region. Then, the centroids are joined to obtain a line. The whole im-age is now rotated so as to make this line parallel to the Y–axis. This method is applied on all the images – tem-plate and test images. This is shown in Fig. 1. This stage proves to be very effective especially when the alignment angle is very large, and sets a reference parameter for all the images. Although this method is an approximate alignment, it saves time in further alignment processes. Hence, the alignment stage based on the minutiae points becomes very fast and computationally much easier at a later stage; the differences in the corresponding pairs come out to be much smaller at this stage than what they would be without this stage. The algorithm [20] uses minutiae–centered circular regions to find correspon-dences in order to align. But, when the angle of rotation is large, this comes out to be computationally expensive.
Figure 1. The left binary image is the one without the mass–centroid–based alignment. The right binary image
is rotated based on the mass–centroid concept.
2.2.2 Region separation—sector formation to
handle distortion
The degree of distortion at the regions close to the cen-ter is lesser as compared to the regions that are away from the center. In other words, the distortion is not uniform throughout the fingerprint image. For example, rotational effects are lesser at the central regions as com-pared to the regions away from the center owing to the elasticity. When the force applied on the scanner is not orthogonal, the central regions show lesser amount of dis-tortion than any other. When the degree of disdis-tortion is high, the aligning is time consuming. The algorithm [21] uses a triangular–based matching by joining the neigh-borhood minutiae points, it does not consider the non– uniform distortion that is present throughout the image. Hence, finding the alignment becomes very costly when all the minutiae points are considered.
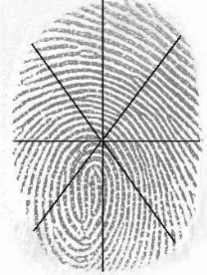
Figure 2. The inner circular regions are shown in the figure2.
Value of D Average number of minutiae
0.3μ 5.8
0.4μ 7.66
0.5μ 10.55
Table 1: Selection of the parameterD. The average num-ber of minutiae is calculated on 20 random images.
The minutiae points inRiarePi, and inRoarePo. The setPpi stores every possible pair of the set Pi; similarly, Ppo is calculated.
2.3
Alignment
Since the distortion, which is the cause for false minutiae, is more in Ro than in Ri, the algorithm considers the minutiae points in the inner region to find an alignment with the template image. Alignment based on the sin-gular point detection is more prone to errors [22]. Since the algorithm has already aligned the images using the mass-centroid concept, the angle of aligning in this stage is very small. The parameters that we used to find an alignment are:
• Ridge count r between any two minutiae points. This is calculated by tracing the line and calculat-ing the number of 1–to–03transactions in the binary image. The ridge count is a rotational–and–scaling independent parameter.
• The orientationoof the minutiae points at the ends of a line. This is independent of scaling.
• The type of minutiae tat the end points of the line formed using the minutiae pair. For example: if both the end points have a bifurcation or a ridge ending, or the pair has a bifurcation and a ridge. This is also independent of rotation and scaling.
• The angle a of the line joining the minutiae points with respect to a reference line, say the X–axis. This is also a scaling-independent factor.
The method that we have adopted to align the image is outlined below:
1. Minutiae pairs are formed by using all the minutiae Pi inRi. We call this set asPpi for an input image, and similarly minutiae pairs Ppit4 for the template images is calculated.
2The circle is drawn from the center of the image in the algo-rithm. The circular regions in this figure are not scaled.
3The value 1 stands for the white pixel and black is represented by the value zero.
4The superscripttis used to show that the parameter is for the template image. The parameters without this subscript are for the test images.
2. Let there beM andN minutiae pairs in the setsPpi and Ppit respectively. Every pair inPpi is compared with every pair in Ppit using the parameters men-tioned under Section 2.3. The detailed proposed algorithm for aligning is summarized as Algorithm 1.
Algorithm 1 Alignment
Require: Ppi: Minutiae pairs inRi,Ppit: Minutiae pairs inRti
M {Number of minutiae pairs inRi},N {Number of minutiae pairs inRti}
Initialization
Angle= 0;{an array of unknown size} procedureAlignment
1: for(i= 1 :M)do
2: for(j= 1 :N)do
3: if (ri==rjt)then
4: if (oi ==otj)then
5: if (ti ==ttj)then
6: DiffAngle= (ai−atj)
7: end if
8: end if
9: end if
10: if (DiffAngle≤T hreshAngle)then
11: AddDiffAngletoAngle
12: end if
13: end for
14: end for
15: end procedure
The value of theT hreshAngleis taken as 2 degrees. This is very small because, an approximate align-ment is already carried out on the binary fingerprint image. The mass–centroid alignment sets a reference and hence saves time in finding the correspondence among the minutiae pairs. The comparison of orien-tation, type of minutiae, and ridge count values in the respective arrays for the minutiae pairs is based on the pattern: lowest value of the X–coordinate to highest, and lowest value of the Y–coordinate to the highest, in the Cartesian co–ordinate system. For every image, the same order is followed. Hence, the order of finding correspondences is maintained.
[image:3.595.298.548.145.411.2]2.4
Minutiae–pair Matching
After the alignment stage, the test image is aligned in accordance with the template image. In order to account for the distortion in the fingerprint images, the algorithm divides the regionRointo several sectors as shown in Fig-ure 3. In each such sector, independent of other sectors, all possible minutiae pairs are calculated and their pa-rameters are stored. If the number of sectors is small, say four or less, the non–uniform distortion affects the re-sults since the structures constructed using the minutiae become large; smaller structures show greater tolerance when distortion is involved. In our algorithm, the num-ber of sectors was chosen to be eight. Since the minutiae pairs are used in matching, and the structures formed by these pairs are small enough, the effect of distortion in the global structure is eliminated as far as possible. [23] uses the set of all possible triangles as input to Fuzzy Feature Match based algorithm. If the triangles constructed by joining far away points such that the level of distortion in the global perspective is high, the algorithm proves to be costly in finding feature matches. Also, since similar structures are used for matching, scaling does not play a threat in finding a match. While the algorithm also uses the minutiae pairs in Ri, the matches in Ri are given more weight–age than the matches inRo. This is again due to the amount of distortion inRo.
[image:4.595.109.213.420.558.2]The matching is done sector-wise. The minutiae pairs are confined to a particular sector in Ro and Ri. For every sector, the number of pairs that match is calculated.
Figure 3. The images were divided into several sectors5 in order to handle distortion.
Let there beUk andVk minutiae pairs inkth sector i.e., Sk and Skt6 respectively. Sector–wise matching includes both sectors (inner and outer) from a single image.
The detailed proposed algorithm for matching is summa-rized as Algorithm 2. The valuesCi andCostore the counts of the number of minutiae pairs that are matched inRi and Ro respectively. A match is possible whene% of the pairs inRiandf% of the pairs inRomatch. Here,
5Sectors are not measured to be equal in the rough figure. 6This denotes the inner and outer sector of the template image.
Algorithm 2 Sector–wise Matching
Require: Ppi: Minutiae pairs inRi,Ppo: Minutiae pairs inRofor bot the images
Uk {The number of minutiae pairs in kth sector of Ri} Vk {The number of minutiae pairs inkthsector ofRti}
Initialization
Ci=Co= 0;{an array of unknown size} procedureSector-wise Matching
1: for(i= 1 :Uk)do
2: for(j= 1 :Vk)do
3: if (ri==rjt)then 4: if (oi ==otj)then 5: if (ti ==ttj)then
6: Ci=Ci+ 1 if the pair∈Rki
7: Co=Co+ 1 if the pair∈Rko
8: end if
9: end if
10: end if
11: end for
12: end for
13: end procedure
e > f. In our case, the valuee was set to around 74% – found experimentally, and the valuef was set to around 30%.
3
Results
The fingerprint database that we have used is the publicly available standard FVC-2004 fingerprint data – http://bias.csr.unibo.it/fvc2004/download.asp. The level of distortion in FVC–2004 DB is relatively higher than that in FVC–2000 and FVC–2002. We have tried the algorithm on a total of 320 fingerprint images that belong to 40 distinct fingers – eight copies of each finger. The algorithm was implemented on Matlab R20072. The algorithm was tested on a Pentium–4 processor (3 GHz), 1GB RAM system. It was observed that the average time taken for the extraction of the binary image was close to 8 seconds.
The average time taken for the matching is very low. The matching was done without the mass–centroid con-cept and with the mass–centroid concon-cept, and the results were compared with each other. It is seen that the mass-centroid concept increases the speedness by several hun-dreds. This is shown in Table 2.
Mass-centroid Time taken
In Seconds
Without 0.2
[image:4.595.335.505.638.689.2]With around 0.00005681
Table 2: Classification results
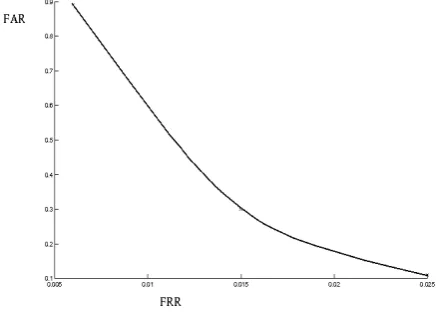
large in comparison with the other one due to the align-ing stage which takes time. The fast alignalign-ing method approximates the alignment angle and also increases the speedness of the matching stage. The ROC curve hence obtained is shown in Figure 4.
Figure 4. The Receiver–operating Curve at various thresholds.
4
Conclusions and future work
The mass–centroid concept is extremely fast and hence saves valuable time in finding the alignment and match. The time factor by which it improved the algorithm is sev-eral hundreds. Further work would be directed towards increasing the accuracy of heavily distorted images.
References
[1] A. Jain, L. Hong, and R. Bolle, On-line Fingerprint Verification,IEEE Trans. Pattern Analysis and Ma-chine Intelligence, vol. 19, no. 4, Apr. 1997.
[2] A. Ross, S. Dass, and A K. Jain, A deformable model for fingerprint matching,Patter Recogn., vol. 38, no. 1, pp. 95-103, Jan. 2003.
[3] A. M. Bazen and S. H. Gerez, Fingerprint Matching by thin-plate spline modeling of elastic deformations, Pattern Recogn., vol. 36, no. 8, pp. 1859-1867, 2003.
[4] N. K. Ratha, R. M. Bolle, Effect of controlled acqui-sition on fingerprint matching,in Proc. 14th ICPR, 1998, vol. 2, pp. 1659-1661.
[5] C. Dorai, N. Ratha, and R. Bolle, Detecting dynamic behavior in compressed fingerprint videos: distor-tion, in Proc. CVPR, Hilton Head, SC., Jun. 2000, pp. 2320-2326.
[6] H. Chen, J. Tian, and X. Yan, Fingerprint matching with registration pattern inspection,Proc. AVBPA, Lect. Notes Comput. Science. 2688. New York, Springer, 2003, pp. 327-334.
[7] A. K. Jain, L. Hong, and R. Bolle, On-line finger-print verification,IEEE Trans. Pattern Anal. Mach. Intell., vol. 19, no. 4, pp. 302313, Apr. 1997.
[8] X. P. Luo, J. Tian, and Y. Wu, A minutia matching algorithm in fingerprint verification, in Proc. 15th ICPR, Sep. 2000, vol. 4, pp. 833836.
[9] D. Lee, K. Choi, and J. Kim, A robust fingerprint matching algorithm using local alignment, in Proc. 16th ICPR, Aug. 2002, vol. 3, pp. 803806.
[10] N. Ratha, R. Bolle, V. Pandit, and V. Vaish, Ro-bust fingerprint authentication using local structural similarity,in Proc. 5th IEEE Workshop on Applied Computer Vision, Dec. 2000, vol. 1, pp. 2934.
[11] X. Jiang and W. Y. Yau, Fingerprint minutiae matching based on the local and global structures, in Proc. 15th ICPR, Sep. 2000, vol. 2, pp. 10381041.
[12] A. Senior and R. Bolle, Improved fingerprint match-ing by distortion removal, IEICE Trans. Inf. Syst., Special issue on Biometrics, vol. E84-D, no. 7, pp. 825831, Jul. 2001.
[13] X. J. Chen, J. Tian, and X. Yang, A new algorithm for distorted fingerprints matching based on normal-ized fuzzy similarity measure, IEEE Trans. Image Process., vol. 15, no. 3, pp. 767776, Mar. 2006.
[14] Anil Jain, Arun Ross, and Salil Prabhakar, Finger-print matching using minutiae and texture features, in Proc. of Intnl. Conf. on Image Processing ICIP, pp. 282-285, Thessaloniki, Greece, Oct. 7-10, 2001.
[15] Hong, L., Wan, Y., and Jain, A. K. Fingerprint im-age enhancement: Algorithm and performance eval-uation.IEEE Transactions on Pattern Analysis and Machine Intelligence20, 8 (1998), pp 777-789.
[16] Tico, M., and Kuosmanen, P. An algorithm for ngerprint image post-processing. In Proc. of the Thirty-Fourth Asilomar Conference on Signals, Sys-tems and Computers (November 2000), vol. 2, pp. 17351739.
[17] Amengual, J. C., Juan, A., Prez, J. C., Prat, F., Sez, S., and Vilar, J. M. Real-time minutiae extraction in ngerprint images.In Proc. of the 6th Int. Conf. on Image Processing and its Applications (July 1997), pp. 871875.
[18] Mehtre, B. M. Fingerprint image analysis for auto-matic identication.Machine Vision and Applications 6, 2 (1993), 124139.
[20] Haiyong Chen, Hongwei Sun, Kwok-Yan Lam, A fast and elastic fingerprint matching algorithm us-ing minutiae-centered circular regions,Intl. Conf. on Emerging Security Information, Systems and Tech-nologies, IEEE, Oct. 14-20, 2007.
[21] Z. M. Kovacs-Vajna, A fingerprint verification sys-tem based on triangular matching and dynamic time warping,IEEE Trans. on Pattern Analysis and Ma-chine Intelligence, vol. 22, no. 11, pp. 1266-1276, Nov. 2000.
[22] Sharat Chikkerur and Nalini Ratha, Impact of Sin-gular Point Detection on Fingerprint Matching Per-formance, AUTOID ’05: Proceedings of the Fourth IEEE Workshop on Automatic Identification Ad-vanced Technologies, IEEE Computer Society, ISBN 0-7695-2475-3, pp. 207-212, 2005.