i
A ROBOT HAND WITH DATA GLOVE INPUTS
E CHAO CHER
This report is submitted in partial fulfillment of the requirement for the award of Bachelor of Electronic Engineering (Industrial Electronics) With Honors
Faculty of Electronic and Computer Engineering
Universiti Teknikal Malaysia Melaka
ii
UNIVERSTI TEKNIKAL MALAYSIA MELAKA
FAKULTI KEJURUTERAAN ELEKTRONIK DAN KEJURUTERAAN KOMPUTER
BORANG PENGESAHAN STATUS LAPORAN
PROJEK SARJANA MUDA II
Tajuk Projek : A Robot hand with Data Glove Inputs
Sesi
Pengajian : 2010/ 2011
Saya E CHAO CHER mengaku membenarkan Laporan Projek Sarjana Muda ini disimpan di Perpustakaan dengan syarat-syarat kegunaan seperti berikut:
1. Laporan adalah hakmilik Universiti Teknikal Malaysia Melaka.
2. Perpustakaan dibenarkan membuat salinan untuk tujuan pengajian sahaja.
3. Perpustakaan dibenarkan membuat salinan laporan ini sebagai bahan pertukaran antara institusi
pengajian tinggi.
4. Sila tandakan ( √ ) :
SULIT*
*(Mengandungi maklumat yang berdarjah keselamatan atau kepentingan Malaysia seperti yang termaktub di dalam AKTA RAHSIA RASMI 1972)
TERHAD** **(Mengandungi maklumat terhad yang telah ditentukan oleh
organisasi/badan di mana penyelidikan dijalankan)
TIDAK TERHAD
Disahkan oleh:
__________________________ ___________________________________
(TANDATANGAN PENULIS) (COP DAN TANDATANGAN PENYELIA)
Tarikh: ________________________ Tarikh: ________________________
iii
“I hereby declare that this report is the result of my own work except for quotes as cited in the references.”
Signature : ………
Author : E CHAO CHER
iv
“I hereby declare that I have read this report and in my opinion this report is sufficient in
terms of the scope and quality for the award of Bachelor of Electronic Engineering (Industrial Electronics) With Honours.”
Signature : ………...
Supervisor’s Name : Mr.Engr Khairuddin Bin Osman
v
vi ACKNOWLEDGEMENT
First and foremost, I would like to praise Gog for HIS blessing. He gave me physical and mental to carry on my final year project from the beginning up to completion.
I would like to express gratitude and thanks to my supervisor, Mr. Engr. Khairuddin Bin Osman for his support and unfailing patience throughout the duration of the project. His encouragement and guidance are truly appreciated. Otherwise, this project has not been possible. I have learnt a lot under his guidance, be it practically or theoretically.
Other than that, I am also grateful to my all friends who help me and giving me opinion along implementation of this project.
I would like to thanks my parent and my girlfriend on their moral support as I can count on them whenever I am upset or down.
vii
ABSTRACT
Data glove is one of several types of electromechanical devices used in haptics
application which apply tactile sensation of a human to interact with computers. Haptics
device usually contact between computer and the user through an input or output device,
such as joysticks or data glove, that senses the body’s movements. Robot hand is an
autonomous robot which allowing a direct mapping from a human movement to robot. In
this paper the mechanism and design of a humanoid robot hand with a data glove remote
control is presented. This system was designed with combination of robotic hand and data
glove. Data glove fixed in with flex-sensors as sensation of human hand movement. PIC
microcontroller use as the interact device between data glove with robot hand. Design of
robot hand was base on the study of six human grasping behaviors. The project denotes
that data glove input has a high potential to control humanoid robot hand to perform
viii
ABSTRAK
Data maklumat sarung tangan merupakan salah satu sumber electromekanikal
yang sangat popular digunakan dalam bidang penyentuhaniaitu bidang berkenaan dengan
alat perhubungan yang menyampaikan pergerakan penyentuhan manusia kepada
komputer. Biasanya, sumber sentuhan berinteraksi antara manusia dengan computer
melalui sumber masukan atau keluaran seperti kawalan tangandan data maklumat sarung
tangan. Tangan robot merupakan satu robot automatik yang membenarkan peniruan
pergerakan manusia kepada robot. Dalam projek ini, perbincangan memberi tumpuan
terhadap reka bentuk mekanikal struktur tangan robot dengan data maklumat sarung
tangansebagai sumber masukan. System ini direka bentuk dengan pergabungan teknologi
antara tangan robot dengan data maklumat sarung tangan. PIC kawalan digunakan
sebagai sumber interaksi antara data maklumat sarung tangan dan tangan robot. Secara
umumnya, pembentukan tangan robot adalah berdasarkan enam cara pemegangan yang
biasa dilakukan oleh tangan manusia. Hasil daripada projek ini akan menunjukkan
keberkesanan yang dapat dilakukan oleh pergabungan teknologi antara data maklumat
ix
TABLE OF CONTENTS
CHAPTER CONTENT PAGE
TITLE i
DECLARATION ii
ACKKNOWLEDGEMENT vi
ABSTRACT vii
ABSTRAK viii
TABLE OF CONTENTS ix
LIST OF FIGURES xiii
LIST OF TABLES xvii
LIST OF APPENDIX 73
I INTRODUCTION
1.1 Project Overview 1
1.2 Objective 3
1.3 Scope 3
1.4 Methodology 4
II LITERATURE REVIEW
2.1 Introduction 5
2.2 Literature study 5
2.3 Dexterous Robot Hand Descriptions 8
2.4 Potential Commercial Uses
2.4.1 General 9
2.4.2 Service robot 9
x
2.5 Benefits
2.5 .1 Functionality, Mobility, Dexterity and
Precision 10
2.5 .2 Sensors 10
2.5 .3 Wrist and Finger Control 10 2.5 .4 Human Configuration 10 2.5 .5 Size 11 2.5 .6 Environmental Tolerance 11
2.6 Control Structure of Human Motions 11
2.7 General Structure of Robot Hand 14
2.8 The Mechanical Systems 14
2.8.1 Mechanical Design 15 2.8.2 Actuator System 16 2.8.3 Sensor System 17
2.9 Control System 18
2.9.1 Control Hardware 21
2.9.2 Control Software 21
2.10 Grasping and Manipulation 22
III METHODOLOGY
3.1 Introduction 25
3.2 Hardware Development
3.2.1 Motor Selection 26
3.2.1.1 DC Motor 26
3.2.1.2 Stepper Motor 27
xi
3.2.2 Sensor Selection 33
3.2.2 .1 Features 33 3.2.2 .2 Mechanical Specifications 33
3.2.2 .3 Electrical Specifications 33
3.2.2 .4 Dimension Diagram 34
3.2.2 .5 How it Functions 34
3.2.3 Circuit and Controller 35
3.2.3.1 Microcontroller (PIC) 35
3.2.4 Frames 37
3.3 Software Development 38
3.3.1 Circuit Design 38
3.3.2 Programming Selection 38
3.4 Flow chart 39
3.5 Gannt chart 40
IV RESULT
4. 1Hardware Development
4.1.1 Data Glove with Robotic Hand System 41 4.1.2 Robotic Hand Mechanism 42 4.1.3 Design of Frames 44
4.1.4 Mini RC Servo Motor 47
4.1.5 Design of Schematic Diagram 49
4.2 Software Development 50
4.2.1 Define the Programming 51
4.2.2 Program a Flex sensor and Servo motor 52
xii
4.3 Analysis Final result of Robot hand 56
4.3.1 Examples of Object Grasping 56
4.3.2 Explanation Graph Analysis Result 59
4.3.2.1 Changing of Time Pulse 59
4.3.2.2 Measuring Voltage Changing of Flex Sensor 64
4.3.3.3 Changing bits number of PIC 16F877A 65
V DISCUSSION AND CONCLUSION 5. 1Disccusion 66 5. 2Conclusion 67 5.3 Recommendation for Future Improvement 68 5.3.1 Increase Robot hand Stability 68 5.3.2 Incorporate Sensors 69
5.3.3 Increase D.O.F 69
REFERENCES 70
xiii
LIST OF FIGURES
No TITLE PAGE
1.1 Data Glove with Robot Hand 2
1.2 Project Flowchart 4
2.1 Stretch Reflex 12
2.2 Flexor Reflex 13
2.3 Relationship of Suppression 13
2.4 Movement motion of the Palm Part 16
2.5 Strain Gauges and Force Placing in Robotic Hand 17
2.6 Tactile Sensor 18
2.7 a Overview of the Control Systems for Robot, Arm and Hand. 19
2.7 b Superior Hand Control System (SHC) 20
2.7 c Local Hand Control System (LHC) 20
2.8 2D Link Frames 23
xiv
3.1 Sample of Mini Size DC Motor 27
3.2 Various Model of Stepper Motor 28
3.3 Positioning Controlled by Number of Pulses 29
3.4 Rotation Speed Controlled by Pulse Speed 29
3.5 DC Servo Motor 31
3.6 AC Servo Motor 31
3.7 Standard RC Servo 31
3.8 Micro RC Servo Motor 32
3.9 Dimension flex sensor 34
3.10 Variables resistance of flex sensor 34
3.11 Microcontroller (model PIC16877A) 36
3.12 Description Pin 36
3.13 Layout ISIS 7 PRO 38
3.14 Logo microC PRO for PIC 38
3.15 Process Flowchart 39
3.16 Gantt chart 40
xv
4.1 Robot hand with Three fingers and a Fixed Thumb Finger 42
4.2 Top view 43
4.3 Left side view 43
4.4 Right side view 43
4.5 Fingers Robot Hand 44
4.6 2D Finger Diagram 44
4.7 Linkage System 45
4.8 Linkage System Mechanism 45
4.9 Frames Measurements 46
4.10 Pulse Coded Modulation 47
4.11 Schematic diagram 49
4.12 A view of MicroC PRO for PIC 50
4.13 Defines the Programming 51
xvi
4.15 Lateral Grasp 56
4.16 Triangular Box Grasp 57
4.17 Square Wood Grasp 57
4.18 Span Paper Grasp 58
4.19 Spherical Grasp 58
4.20 Time Pulse of Servo Motor 1 60
4.21 Time Pulse of Servo Motor 2 61
4.22 Time Pulse of Servo Motor 3 62
xvii
LIST OF TABLES
No TITLE PAGE
3.1 Specifications of Motor 32
3.3 Features of Sensor 33
3.3 Mechanical Specifications 33
3.4 Electrical Specifications 33
3.5 Comparison of the Quality of Different Material 37
4.1 Robotic Hand Design Specification 41
1
CHAPTER I
INTRODUCTION
1.1Project Overview
Data glove is one of several types of electromechanical devices used in haptics application which apply tactile sensation of a human to interact with computers. Haptics
device usually contact between computer and the user through an input/output device,
such as joysticks or data glove, that senses the body’s movements. Commonly, data glove
used virtual reality environments where the user sees an image of data glove and can
manipulate the movements of the virtual environment using the glove. Robot hand is an
autonomous robot which allowing a direct mapping from a human movement to robot. In
this paper the mechanism of a humanoid robot hand with a data glove remote control is
presented. This system was designed with combination of robotic hand and data glove.
Data glove fixed in with flex-sensors as sensation of human hand movement. PIC
microcontroller use as the interact device between data glove with robot hand. Robot
hand was base on the study of six human grasping behaviors. The result denotes that data
2
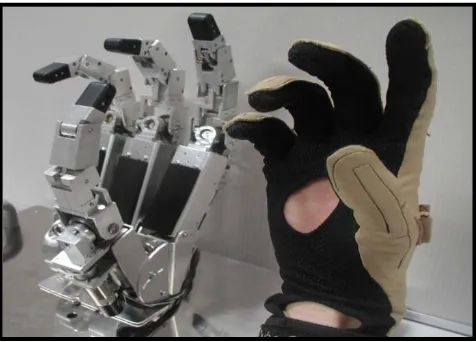
dexterous grasping tasks. Figure 1.1 display the example outlook of the data glove with
[image:19.612.171.409.134.305.2]robot hand. The size of the robot hand design same as the human being size.
Figure 1.1 Data glove with robot hand
With the growth of interest towards humanoid robots, several robotic hands more or less anthropomorphic have been developed, the goals of each project were different,
and the results are not easily comparable to the purpose of declaring one project better
than another [1]. Despite such a trend towards the development of human-like robotic
hands, the results so far achieved are not yet reach the level of satisfaction. In general,
research on a multi-fingered hand is very useful for maintenance work in hazardous
environments especially in nuclear power plants, underwater and space stations. Mostly,
a function of the robot hands are limited to grasping and holding an object article, and
holding and object article, and pushing up or down a lever. One of the main concerns is
the control task to grasp various objects. Most of the robot hand requires many actuators
to be dexterously moved. However, the control system of the humanoid robot becomes
3
1.2 Objective of Research
The goal of this project is to design and implement a multi-fingers robot hand with a
data glove input.
1.3Scope of Research
The scopes of the research are:
a. To minimize the design expectation, the scope of this paper focuses on study
existing design and control issues of the robotic hand.
b. Analyze the general structure of humanoid robot hand including the mechanical design, control system, motor and sensor.
4
1.4 Methodology:
Concept Review
Discussion with supervisor
Literature review
Seeking information
Design concept and Development 1. Design concept
2. Mechanical system 3. Material selection
Overall system testing
Fulfill desired
result
Finalize
End Redesigning and troubleshooting
program
Investigate existing project
Building circuit
Programming
5
CHAPTER II
LITERATURE REVIEW
2.1 Introduction
This chapter will discuss and analysis about various kind of robotic hand in the
related field of robotic, mainly focus to the multi-fingers robot hand. Beside that, theory
of multi-fingers robotic hand also will be discussed in his chapter. This analysis is used to
determine an exact design and understanding the requirement for the development of this
project.
2.2 Literature Study
Four fingers robot hand using ultrasonic motor and elastic elements is develop by
Ikuo Yamano and Takashi Maeno [5]. Their robot hand has 20 DOF (degree of freedom)
which having almost the same DOF and size as human hand. Mass of their robot is 853g
only. The lightest weight is advantageous in connectivity to various robot arms. Elastic
element in this robot hand is an advantage in passive compliance as well as grasp force
6
robot hand has advantages over other robot hand in term of weight and DOF, thus the
result is highly sophisticated as an end effecter for human operation.
Multi fingers robot hand with fingertip tactile sensor has been develop by Hideaki
Hashimoto, Hideki Ogawa, Masao Obama, Toshiya Umeda, Kyoichi Tatuno Furukawa
using hydraulic pressure [1]. Advantages of using tactile sensor are the silicone rubber
cap is easy to fit onto any usual contact object that a human finger can handle. But a
disadvantage of this sensor is that a direction and a position of measured pressure cannot
be obtained. However the result of basic and applied experiments indicates the feasibility
of their multi fingers robot hand system.
A humanoid robot hand with stable pinching research is carried out by Kiyoshi
Hoshino and Ichiro Kawabuchi in 2005 [2]. The result of this research showed that it is
difficult to generate the action of stably pinching paper or needle. However,when
experiments were carried out to investigate force control characteristics of the finger tip
joint. They providing the finger tip with a joint rich in force control performance even
weak maximum generated force is effective for securing delicate control characteristic
finger tip force.
Scale dependent grasp research has been done by Makoto Kaneko in 2000. In the
research, Makoto has proposed five basic grasping strategies (direct grasp, sliding based
grasp, rolling based grasp, regrasping based grasp, initial adjustment motion) which are
7
robot end effectors for space operation develop in 2002. This robot hand represented the
first step in developing a hand that lies in the middle of the simplicity or dexterity
spectrum by being dexterous enough to utilize the majority of CATs and interface. With
the database of grasping requirements obtain they turn in develop of a simple dexterous
robot hand that is optimized for cylindered grasping [7].
In the paper of mechanical system and control system of a dexterous robot hand
by Dirk Osswald and Heinz Wornhas show that a suitable mechanical system and fine
control system is necessary to perform a fine manipulation dexterous [8]. The result was
done successfully for the Karlsruhe Dexterous Hand II. Knowledge based control of
grasping in robot hand using heuristic from human motor skill research carried out in
1993. In the paper, they proposed an alternative approach to high level control based
upon human heuristic. They show that the classical techniques for the control robots
require solution of kinematics and dynamic equation is more difficult to apply as the
mechanical complexity of robot components increase [9]. In the paper has presented a
methodology for transferring to a robot hand and ability of humans to adapt their grasp
patterns to various tasks. In the paper of design TUAT or Karlsruhe Humanoid Hand,
their research is focus o design an artificial arm and robot hand for handicapped people.
The result has show a simplify hand control system which is the hand only driven
by one actuator. The control system of the humanoid robot will becomes more