159
Copyright © 2011-15. Vandana Publications. All Rights Reserved.
Volume-5, Issue-3, June-2015
International Journal of Engineering and Management Research
Page Number: 159-163
Survey on Localization in Wireless Sensor Network using Mobile Anchor
Points
R.B. Chavan1, M. Azharuddin2 1,2
Department of CSE, SIET, Vijayapura, INDIA
ABSTRACT
Wireless sensor networks concerned with localization of sensor nodes with least errors extracts more attention of the people. Localization with mobile anchor points makes it easier to locate static nodes using GPS technique. Many methods have been developed to minimize the localization error but failed to achieve the accurate results. This paper describes a survey on range free localization using with mobile anchor points. Each anchor point equipped with GPS moves in sensing field with a particular trajectory such as Scan, Double scan and Hilbert and broadcasts its current position periodically. This paper minimizes location problems, covers majority of sensor nodes to localize in environment.
Keywords— Localization, mobile anchor points, range free localization, wireless sensor network.
I. I
NTRODUCTIONThe path followed by the anchor node in wireless sensor network plays vital role in accuracy with which sensor node can be located in the network. The advancement in wireless communication & electronics enabled the development of low cost sensor networks. Wireless sensor network (WSN) consists of hundreds or thousands of sensor nodes and a small number of data collection devices [1]. The sensor nodes have the form of low cost, low-power, small-size devices, and are designed to carry out a range of sensing applications. The sensor networks can be used for various application areas (e.g. Health, military, home). Localization is one of the most important aspects of WSN because the location information is typically useful for coverage, deployment, routing, location service, target tracking and rescues. Accordingly, many sensor localization methods have been proposed for WSNs.
Broadly speaking, these methods can be categorized as either
range based or range free. In range based schemes, the
sensor locations are calculated from the node-to-node distances or inter-node angles. Conversely, in Range-free schemes, the sensor locations are determined by radio connectivity constraint. Range based schemes are more accurate than range-free schemes [3]. However, they require the use of infrared, X-ray or ultrasound techniques to calculate the inter-node distance and/or angle, and are therefore more complex and more expensive then range-free schemes. As a result, range-free localization schemes tend to be preferred for large-scale WSN applications. Most localization mechanisms use fixed anchors. However, if all of the nodes within the network have the ability to determine their locations, a large number of fixed anchors are required. Thus, several methods have proposed for reducing the anchor deployment cost by utilizing GPS-enabled mobile anchors, which navigate the sensing field and issue Periodic beacon messages advertising their current coordinate. The development of practical, localized algorithms is probably the most needed and most challenging task in wireless sensor networks (WSNs). Localized algorithms are a special type of distributed algorithms where only a subset of nodes in the WSN participates in sensing, communication, and computation
.
II.
LITERATURE REVIEW160
Copyright © 2011-15. Vandana Publications. All Rights Reserved.
length of the chord is too short, the probability ofunsuccessful localization will increase rapidly. Thus, the authors suggested that the length of each chord should exceed a certain threshold in order to minimize the localization error
.
Path Planning Algorithm for Mobile Anchor-Based localization in wireless sensor networks [2], this paper presents a path planning scheme, which ensures that the trajectory of the mobile anchor node minimizes the localization error and guarantees that all of the sensor nodes can determine their locations. The results show that the proposed path planning algorithm yields both a lower localization error and a higher percentage of localized sensor nodes than existing path planning schemes. Effective range free localization scheme for wireless sensor network [3], in this paper a cost effective schema for localization has been proposed. It uses two beacon nodes to identify the location of unknown nodes. It also uses flooding and estimating method to accurately identify the location of other nodes. Available area is divided into zones and beacons are provided for each zone. Beacon nodes are placed in appropriate locations normally two in a zone to provide location information. Using the two nodes location of unknown nodes can be calculated accurately. Adaptive beacon placement [4], in this paper analysis and evaluation is performed on three novel adaptive beacons placement algorithms using localization based on RF-proximity. The three simple off-line beacon placement algorithms are Random, Max and Grid. Random methods are localization at different areas can randomly point in the region the last method is grid approaches to determine a candidate point to compute the cumulative localization error over each grid, for several overlapping grids in the terrain. This is based on the observation that adding a new beacon affects its nearby area, not just the point where it is placed. A set of computation perform to locate the beacons. Path planning of mobile landmarks for localization in wireless sensor network [5], this paper proposes three path planning schemes for this particular scheme namely SCAN, DOUBLE SCAN and HILBERT. In SCAN, the mobile anchor node travels along a single dimension (e.g. the x-axis or y-axis direction), and the distance between two neighboring segments of the node trajectory defines the resolution of the trajectory. SCAN is simple and provides uniform coverage to the entire network. However, the collinearity of the beacons degrades the accuracy of the localization results. In DOUBLE SCAN, the collinearity problem is resolved by driving the anchor in both the x- and the y-directions. However, though this strategy improves the localization performance of the sensor nodes, the path length is doubled compared to that of SCAN, and thus the energy overhead increases accordingly. In HILBERT, the mobile anchor node is driven along a curved trajectory such that the sensor nodes can construct non-collinear beacon points and the total path length is reduced. A range-free localization algorithm for wireless sensor networks [6], according to this paper there are many interesting sensor network applications such as earthquakemonitoring, target tracking and surveillance etc. These new applications require deployment of large number of sensor nodes over large geometrical areas, and their utility are dependent on an automatic and accurate location estimation of these nodes. This would lead to proper identification of significant event locations. In addition, accurate location estimation could also aid in sensor network services such as routing, information processing, tasking and querying. In distributed localization, there could be a small number of nodes, which have a priori knowledge about their coordinates. These nodes are usually called anchor nodes or landmarks. Static path planning for mobile beacons to localize sensor nodes [7], proposed two new path types, CIRCLES and S-CURVES that are specifically designed to reduce the co-linearity during localization. The solution is compared the solution with existing ones using the Cramer Rao Bound (CRB) as the evaluation tool, which gives an unbiased evaluation regardless of localization algorithm used. The evaluation shows that the solutions cope with co-linearity in a more effective manner than previous solutions. The solutions provide significantly better localization accuracy and coverage in the cases where co-linearity is the greatest problem. Localized algorithms in wireless ad-hoc networks: location discovery and sensor exposure [8]. Localized algorithms are a special type of distributed algorithms where only a subset of nodes in the WSN participates in sensing, communication, and computation. Authors have developed a generic localized algorithm for solving optimization problems in wireless ad-hoc networks that has five components: (i) data acquisition mechanism, (ii) optimization mechanism, (iii) search expansion rules, (iv) bounding conditions, and (v) termination rules. The main idea is to request and process data only locally and only from nodes who are likely to contribute to rapid formation of the final solution. The approach enables two types of optimization: The first, guarantees the fraction of nodes that are contacted while optimizing for solution quality. The second provides guarantees on solution quality while minimizing the number of nodes that are contacted and/or amount of communication.
III. MOBILE
ANCHOR
POINTS
A. System Environments and Assumptions
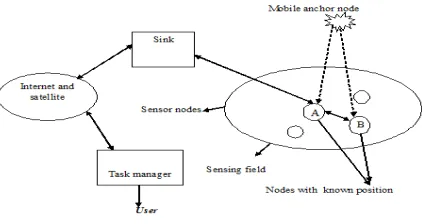
Fig. 1 illustrates the system environment where a sensor network consists of sensor nodes and mobile anchor points. The sensor nodes are distributed randomly in the sensing field.
161
Copyright © 2011-15. Vandana Publications. All Rights Reserved.
the localization process. Second, the mobile anchor points are able to move by themselves or other carriers such as robots or vehicles.
B Localization scheme
In the localization scheme proposed in [1], the sensor nodes determine their locations based on the beacon messages transmitted by a single mobile anchor. However, in this case, the sensor nodes estimate their positions by applying the RSSI technique to the beacon messages. A distributed localization scheme based on a single mobile anchor, in which radio connectivity constraints are imposed in order to minimize the uncertainty in the localization results. There are various probabilistic localization schemes based on a single mobile beacon which shows that non-parametric probabilistic estimation techniques yield more robust and accurate localization results than parametric estimation methods. Localization Scheme: The localization scheme was inspired by the perpendicular bisector of a chord conjecture. The conjecture describes that the perpendicular bisector of any chord passes through the center of the circle. As shown in Fig. 1, the chord of a circle is a segment whose endpoints are on the circle. With two chords of the same circle, the intersection point of two perpendicular bisectors of the chords will be the center of the circle. The localization problem can be transformed based on the conjecture. The center of the circle is the location of the sensor node; the radius of the circle is the largest distance where the sensor node can communicate with the mobile anchors. The endpoint of the chord is the position where the mobile anchor point passes through the circle.
C. Range free localization
For fitting in with distinguishing characteristics of wireless sensor networks, some approaches estimate location without distance or angle information. Centroid formula is used to calculate nodes’ locations based on received beacons containing reference point positions. DV-Hop localization method measures hop counts from each node to specific anchor points. The approximate location of sensor nodes can be computed using the hop counts and triangulation. The DV-Hop scheme can be enhanced with RSSI technology for location refinement. An area-based localization mechanism was developed to narrow down the possible region for a sensor node. The above approaches typically need a large amount of stationary reference points for achieving higher accuracy (10% of the radio range for the best case). Accuracy and communication overhead are thus the most critical issues for the range-free approaches.
Fig 3 sensor network with mobile anchor point
162
Copyright © 2011-15. Vandana Publications. All Rights Reserved.
IV.
M
OBILEL
ANDMARKT
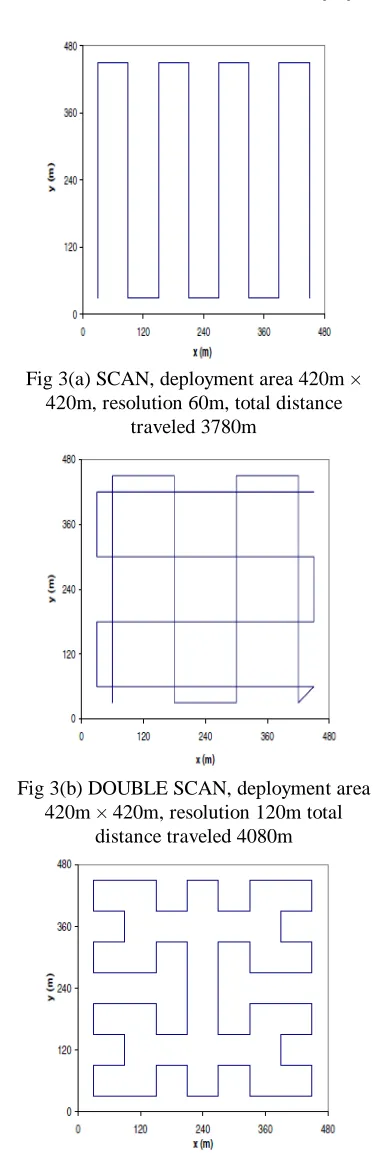
RAJECTORIESIn this section, we describe three different trajectories that are evaluated in this paper: SCAN, DOUBLE SCAN, and HILBERT. For each trajectory, we describe its basic characteristics, followed by a brief qualitative discussion on their advantages and disadvantages. SCAN is a simple and easily implemented trajectory. The mobile landmark traverses the network area along one dimension, as shown in Figure (a). In this figure, the mobile landmark travels along the y-axi s, and the distance between two successive segments of the trajectory, parallel to the y-axi s, defines the resolution of the trajectory. If the communication range of the sensors is R, the resolution should be at most 2R, to make sure that all the sensors will be able to receive beacons. SCAN has the
advantage of offering uniform coverage to the whole network, and it ensures that all nodes will be able to receive beacons from the mobile landmark under a properly selected resolution. Moreover, uniformity keeps the maxi mum error low, as we will show in Section 6. However, SCAN has one
important drawback – co linearity of beacons. When the resolution is larger than the transmission range, many nodes will receive beacons only from one line segment and one direction, which will prevent them from obtaining a good estimate along the x-axi s. DOUBLE SCAN Another
straightforward way to overcome the collinearity problem of SCAN is to scan the network along both directions, as shown
in Figure (b). The problem with this method is that it requires the mobile landmark to travel doubled distance, compared to the simple scan, for the same resolution. In Figure (b), we selected to keep the distance traveled by the mobile landmark similar for all trajectories, hence DOUBLE SCAN is performed
with a doubled resolution compared to SCAN. HILBERT
AHILBERT space-filling curve creates a linear ordering of
points in a higher-dimensional space that preserves the physical adjacency of the points. A leveln HILBERT curve
divides the 2-dimensional space into 4n square cells and
connects the centers of those cells using 4n line segments,
each of length equal to the length of the side of a square cell. We define the resolution of the HILBERT curve as the length
of each line segment, as shown in Figure (c). The key reason we study HILBERT curves in this paper is that such curves
make many turns, compared to SCAN or DOUBLE SCAN. This
implies that if the mobile landmark moves on a HILBERT
curve, the sensors to be localized will have the chance to receive non-collinear beacons and obtain a good estimate for their positions. It can easily be shown that the total distances traveled by the mobile landmark with HILBERT, SCAN and
DOUBLE SCAN are given by:
DHilbert = 4n × R (1)
DScan = (4n − 1) × R (2)
DDoubleScan = (4n + 2n − 4) × R (3)
where n is the level of the HILBERT curve and R is the resolution of the trajectory. Equations 1 and 2 show that the total distances for HILBERT and SCAN differ only by R.
Fig 3(a) SCAN, deployment area 420m × 420m, resolution 60m, total distance
traveled 3780m
Fig 3(b) DOUBLE SCAN, deployment area 420m × 420m, resolution 120m total
distance traveled 4080m
Fig 3(c) HILBERT, deployment area 420m × 420m, resolution 60m, total distance
163
Copyright © 2011-15. Vandana Publications. All Rights Reserved.
Fig 3(d) CIRCLES (path length =3195.93m)
B Evaluation
We compare the path types based on three factors: i) total path length, ii) the localization coverage, and iii) the localization accuracy. Consider the path length first. For each of the four path types, the total path length, L, is a function of R and n:
=
R
=
+
R
As seen in our test scenario, CIRCLES has the shortest
path length. The other three path types have similar path length. Now consider the localization coverage and accuracy. Here, we compare the three path types using the Cramer Rao Bounds (CRB). For each path type, we calculate the CRB at various locations of the entire deployment area. We assume a 1-hop propagation of RSSI readings, and thus the CRB at each location is a strict function of the RSSI readings from broadcast locations 1-hop away. For those locations that cannot be localized because of the unavailability of three non-collinear broadcast locations, the CRB will be infinity. For other locations that can be localized, the CRB gives a tight lower bound of the localization error that can be possibly achieved at the particular location. Thus, the CRB analysis gives an estimate of both localization coverage and localization accuracy.V. CONCLUSION
This paper gives a description on the survey of localization using mobile anchor node in wireless sensor networks. The proposed paper highlights the problems of the existing methods and also describes of minimization of localization error. Specifically, we studied three different deterministic trajectories for use by a mobile landmark in
sensor network localization. Our performance results show that among the three trajectories, SCAN offers the best performance when the trajectory has a fine resolution, i.e., the average distance between the sensors and the trajectory is small. Our trajectories are practical and can be easily implemented in mobile robot platforms. Additionally, most mobile robot control software can detect obstacles that arise in the planned path and dynamically adjust the robot’s movement to travel around them.
R
EFERENCES[1] K. F. Ssu, C. H. Ou, and H. C. Jiau, “Localization with mobile anchor points in wireless sensor network,” IEEE Trans. Veh. Technol., vol. 54, no. 3, pp. 1187-1197, May 2005.
[2] C. H. Ou and W. L. He, “Path planning algorithm for mobile anchor based localization in wireless sensor network,” IEEE Trans, Veh, Technol., vol. 13, no. 2, pp. 466-475, Feb 2013.
[3] S. Tamilselvan and K. Thangaraj, “Effective range free localization scheme for wireless sensor networks,” IJMNCT., vol. 4, no. 1, pp. 34-40, Feb 2014.
[4] Nirupamabulusu, John Heidemann and Deborah Estrin, “Adaptive beacon placement,” CST, Brussels, Belgium, Belgium: ICST, 2007, pp. 1–7.
[5] D. Koutsonikolas, S. M. Das, and Y. C. Hu, “Path planning for mobile landmarks for localization in wireless sensor networks,” Comput. Commun., vol. 30, no. 13, pp. 2577-2592, Sep 2007
[6] Q. Huang and S. Selvakennedy, “A range-free localization algorithm for wireless sensor networks,” University of Sydney, Oct 2006.
[7] R. Huang and G. V. Zuaruba “Static path planning for mobile beacons to localize sensor networks,” in Proc. IEEE Int. Conf. Pervas, Comput. Commun. Workshops, Mar. 2007, pp. 323-330.
[8] Seapahn Meguerdichian, Sasa Slijepcevic, Vahag Karayan, Miodrag Potkonjak, “Localized Algorithms In Wireless Ad-Hoc Networks: Location Discovery And Sensor Exposure,” Communications of the ACM, vol. 43, No. 5, pp. 43-50, May 2000.