1941
Optimized Selection Operation On Non Dominant
Sorting Genetic Algorithm-Iii In Multiobject
Navigation System
Ch.Pavani Priya, O.Pravallika, U.Venkat Krsihna, Selvakumar R.
Abstract: In the contemporary era uses of Electrical Autonomous Vehicles (EAVs) are growing industry, parallel the automating them in the complex and uncertainty paths are most difficulty. In EAVs Multiobject Navigation System (MNS) operation smoothly is more difficult, produces issues in the real world problems, namely multiple conflicting goals during the running condition MNV Elapse Time (ET), Energy Injection (EI), Path predictions. To improve and optimize several works are investigated in more than a decade, but there are two major areas were not able to imp rove namely Optimised Selection Operation (OSP), Simultaneous Search Dataset Decision (SSDD). In this work we have proposed an Optimized Selection Op eration on Non-dominant Sorting Genetic Algorithm –III (NSGA-OSO). It solves the EAVs-MNS limitations. The Algorithm designed with the concept of Machine Learning Reinforced (MLR) Genetic way of Searching and Sorting, NSGA-III parameterised based on the fundamental formulation of Pareto-Optimal for EAVs-MNS, we are improved the key functions in the systems which are Normalize Populat ion Size(NPS), Crossover, Mutation, MOO with Scalable Fitness Dimension techniques correlated with DTLZ-1, DTLZ-2 ,finally No-Trade-Offs (NTo). Algorithm Programmed in MatLAB 2018a platform and Python 3.7. The NSGA-OSO simulation outputs NPS 25, 50, 75, 100, 125, 150 respectively the Crossovers simulates 0.5 percentage, Mutation rates parameter setting various 0.5 in precisely to 0.25 mutation rate. PerformScalarizing (PS) on the selections of single and Multiobject depended on searching and sorting, similarly Scalable Fitness DTLZ s optimize the navigation process 12% during the Elapsed time 20ms to 50ms according the iteratio ns, Efficient NSGA-OSO than existing NSGA-I, NSGA-II, MOEAs algorithms. All the parameter setting and operations are relatively better option for emerging Electrical Autonomous Vehicles.
Index Terms. : Non Dominant Sorting Genetic Algorithm ; Multiobjective Optimization ;Optimized Selection; Electrical Autonomous Vehicle; Machine Learning Reinforcement; Localizations and Navigation System
—————————— ——————————
1
INTRODUCTION
The time period Evolutionary Algorithm (EA) represents a team of stochastic optimization methods simulating the natural evolution process. EAs emerged in the late 1950s and several evolutionary methodologies, primarily genetic algorithms, adaptive planning and development strategies, were suggested from the 1970s. All these approaches work on a number of applicant solutions. In the area of genetics algorithms several concepts available, the following authors were referred the EMO with Categorical Genetic Operators [1] This set is subsequently modified with strong simplifications by two fundamental principles: selection and variance.The other theory, differentiation, simulates the natural capacity to create "different" living beings by means of recombination and mutation while choice imitates the scuffle for replicate and the wealth of alive beings. The following suggested for the real time example for spraying pesticides using multi objective path planning [5]. While the mechanisms underlying the algorithms are simple, they prove to be a general, robust and powerful search mechanism. In particular, it possesses several features desirable for I multiple conflicting aims and (ii) intractable search spaces that are extremely large and complex. The following author described to optimize the path length and path safety [3] Since the mid-1980s, many different algorithms have been proposed and applied in different problem areas.
The following author defined to handle the problems of non linear characteristics of many objectives [2] . In the field of the multi-objective evolutionary algorithms (MOEAs), the growing interest is expressed in, for instance, a series of conferences and two recent books on this subject..
2.BASIC STEPS OF NSGA-III
:
The NSGA-III is good that no additional parameter is needed compared to NSGA-II. The graduated representation of the NSGA-III algorithm shown in Figure 3. The major difference between the NSGA-II and NSGA-III selection mechanisms indicated below: (2) The NSGA-III algorithm can not have required the creation of a new operator qt by another Pt selector operator. On the other side, the choice operator of NSGA-II uses non-dominated rating and crowding range to pick a winner among two potential people. Nonetheless, it is worth noting that NSGA-III makes a choice when at least one individual can't be compared. NSGA-III would recommend penalties in that scenario
3.PROBLEM STATEMENT
————————————————
1 B.Tech final year, Department of ECE, Koneru Lakshmaiah Education Foundation, Green fields, vaddeswarm, Guntur, Andhra Pradesh-522502
1942
There are common problems with multi-objective optimization (MOPs) [4]. Consider, for instance, the development of a dynamic hardware / software device used in mobile telephones, vehicles etc. The costs of these systems are often reduced while maximum performance is desired. Integration goals such as consistency and dissipation of energy may be essential. These can either be explicitly defined as specific parameters for optimization or introduced as restrictions, e.g. that the device scale should not surpass those measurements. It can be defined formally as follows
3.1MULTI OBJECTIVE OPTIMIZATION PROBLEM:
An over-all MOP comprises a usual of n parameters, a usual of k objectives and a usual of m constraints. The functions of the decision variables are objective functions and constraints. Consider the example above and assume that performance of the two goals (f1) and cost-efficiency (f2) must be maximized under size limits (e1). An structure which provides maximum performance with reduced costs and does not exceed the constraints of scale could therefore be an ideal model. In reality only a single objective optimization problem (SOP) needs to be solved if this solution exists. The optimal solution for either objective is also the optimum for the other objective. Nonetheless, the common situation is what renders MOPs complicated if the actual optimal referring to the specific objective functions is sufficiently distinct. The goals are then inconsistent and cannot be optimised at the same moment. Rather, it is necessary to find a suitable solution. In our instance the performance and economic performance of our products generally compete: high performance architectures significantly raise costs and low-performance architectures. The intermediate approach (low efficiency, moderate costs) could be a good alternative, based on the customer requirements. This review shows that MOPs require a new Recent naturebased and evolutionary algorithms, including RE S energy management in a Microgrid, are proposed with the u se of Cuckoo Search (CS) algorithm (Bhoye et al., 2016), Mot hFlame Optimizer (MFO) constraint of engineering design pro blem (Jangir et al., 2016), BAT Optimization Algorithm (Trivedi et al., 2016), Seyedali Mirjalili etc algorithm
4.PROPOSED ALGORITHM:
To improve and optimize several works are investigated in more than a decade, but there are two major areas were not able to improve namely Optimised Selection Operation (OSP), Simultaneous Search Dataset Decision (SSDD). In this work we have proposed an Optimized Selection Operation on Non-dominant Sorting Genetic Algorithm –III (NSGA-OSO) [5] NSGA-III algorithm cannot have required another selection operator for Pt to create new operator. It solves the EAVs-MNS limitations. The Algorithm designed with the concept of Machine Learning Reinforced (MLR) Genetic way of Searching and Sorting, NSGA-III parameterised based on the fundamental formulation of Pareto-Optimal for EAVs-MNS, we are improved the key functions in the systems which are Normalize Population Size(NPS), Crossover, Mutation, MOO with Scalable Fitness Dimension techniques correlated with DTLZ-1, DTLZ-2 ,finally No-Trade-Offs (NTo). Algorithm Programmed in MatLAB 2018a platform
4.1.Proposed NSGA-OSO architecture
FIGURE [1]
Population Size: In one generation how many how many chromosomes are generated is called population size
Selection : Choosing the better fitted chromosome from the population size
Crossover: It is used to combine the two parental information to create new off spring
Crowding system: It gives the average of the boundary values from lowest and highest values
4.2Modified NSGA-III Algorithm for Multi objective
FIGURE [2]
Because of their inherent parallelism, EAs have the potential in a particular imitation sequence to find multiple Pareto-optimal answers. But it is not conceivable to products non-inferior solutions in several multifaceted requests, considerable less the complete Pareto optimum set. Therefore from the EA literature are systematically reviewed and analyzed and each is part of the main class of real-life, unconstricted, multifocal problems. In this case, we initially add a, the optimization target for a MOP can be rephrased more specifically, based on
3goals: .
•It is important that the solutions sought should be spread well (in most situations uniformly).
• A wide range of ideals for each purpose should be protected by the nondominated approaches
• The range of the accomplished nondominated front should b e maximized.
In general there are three facts that characterize an EA: 1. A number of candidates for solution,
1943
3. The genetic operators, recombination and mutation are g enerally manipulatd.
In the cycle of choice, which can be either stochastic or entirely deterministic, individuals of low quality are excluded from the population, whereas people of high quality are repeated. The goal is to concentrate the study on specific parts of the search area and to improve the population's average quality. A scalary value, known as fitness, represents the quality of an individual in relation to optimization. Note that because quality is related to objectives and limitations, the person has to be decoded before he or she calculates his or her fitness. Figure2 indicates this condition. Given a person I am going to be a person. The decoding algorithm of the decision vector x=m(i) is encapsulated by a mapping function m. The application of f to x fields the appropriate target vector based on which I is assigned a value.
4.2 MODIFIED NON DOMINANT SORTING GENITIC ALGORITHM
Input: x(population size), l(the number of divisions) Output: population X
5. PERFORMANCE AND EVALUATION STUDY
This section explains why the NSGA-III algorithm should be detailed in comparison with other techniques published to show that the NSGA-III technology is accurate and valid. It is important to gain a strong understanding of the problem when trying to better understand the strengths and faintness of an algorithm. This extends to all areas of multi-objective evolutionary algorithms (EA). Numerous multi-objective evaluation questions have not been rigorously studied in the EA literature, making it hard to draw accurate conclusions on their strengths and strengths.. In this paper many problems collection of research question parameters, accompanied by a set of concepts in effect. Our examination problem analysis highlights a number of areas that need to be examined. Not only are most test complications ill-built, but the essential category of no separable problems is also poorly represented,
in general no separable multi model ones
We offer a robust toolkit to build welldesigned learning proble ms based on these results. We also have empiric results that s
how how the toolkit can be used in a manner where current te stframeworks are not evaluated by an optimizer.
6 SIMULATION WORK:
6.1 Simulation implemented in matlab 2018a, the following parameters settings has designed.
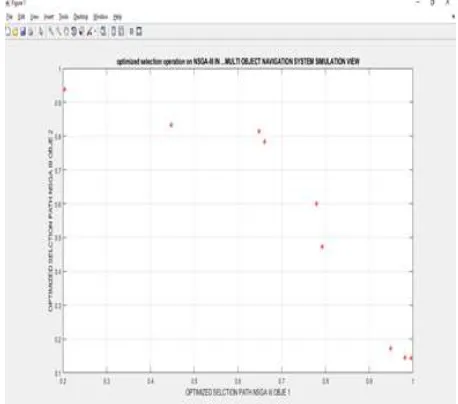
Optimized selection operation on nsga-iii in ...multi object navigation system simulation view
Figure 3. optimized selection operation on nsga-iii in multi
object navigation system simulation view
Figure 4 : optimized path selection for NSGA III
The are the iterations contnious: Staring NSGA-III ...
Iteration 1: Number of F1 Members = 15 Iteration 2: Number of F1 Members = 15 Iteration 3: Number of F1 Members = 18 Iteration 4: Number of F1 Members = 22 Iteration 5: Number of F1 Members = 35 Iteration 6: Number of F1 Members = 39 Iteration 7: Number of F1 Members = 49 Iteration 8: Number of F1 Members = 59 Iteration 9: Number of F1 Members = 72 Iteration 10: Number of F1 Members = 80 ... it continuous till the 50 iterations and then Optimized path is terminated.
1 T generate reference point; 2 X0 population initialization; 3 u0
4 while termination not met do 5 Yt genetic operator (Xt) 6 Et Xt U Yt
7 (D1,D2,……) = Non dominant sort(Et) 8 Jt Ø , I 1
9 repeat
10 Jt Jt U Di and I I+1 11 Until |jt| ≥ K
12 last front to be included: Dt=Di 13 if |jt| = K then
14 Xt+1 = Jt , break 15 end if
1944
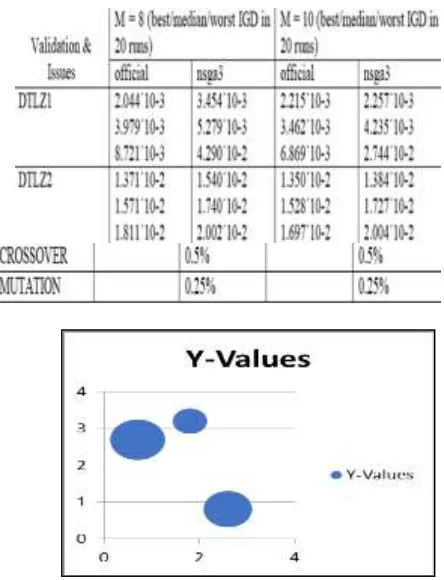
7.COMPARISIONS:
Figure 5 After the modification, now the results for solving
DTLZ with more than 5 objectives
RESULTS AND DISCUSSION:
From figure3 object1 is considered as server and object2 is considered as receiver we must be able to select the optimized path to reach the destination in this we have proved and ploted the optimized path to reach the required application in a smooth navigated path. Form figure4 we can tell that with less number of iteration more number of population or objects can be transferred from server to destination with any break down of the path. With less number iteration more number of population members are transferred after transferring all the members the optimization path will be terminated automatically.In our project the maximum number of generations are 80.Probability of switching the value of a certain generation to its receiver defaultly is 0.1 in this probability of switching the value of certain generation which is called mutation is 0.25.In figure4 the comparisons are made for dtlz test suite problems and compared with original values for solving more than 5 objects for 20 runs in iteration 10 and iteration 8.With less percentage of mutation and crossover we can have efficient optimized path
8.CONCLUSION
The Algorithm designed with the concept of Machine Learning Reinforced (MLR) Genetic way of Searching and Sorting, NSGA-III parameterised based on the fundamental formulation of Pareto-Optimal for EAVs-MNS, we are improved the key functions in the systems which are Normalize Population Size(NPS), Crossover, Mutation, MOO with Scalable Fitness Dimension techniques correlated with DTLZ-1, DTLZ-2 ,finally No-Trade-Offs (NTo). Algorithm Programmed in MatLAB 2018a
platform. The NSGA-OSO simulation outputs NPS 25, 50, 75, 100, 125, 150 respectively the Crossovers simulates 0.5 percentage, Mutation rates parameter setting various 0.5 in precisely to 0.25 mutation rate. PerformScalarizing (PS) on the selections of single and Multiobject depended on searching and sorting, similarly Scalable Fitness DTLZ s optimize the navigation process 12% during the Elapsed time 20ms to 50ms according the iterations, Efficient NSGA-OSO than existing NSGA-I, NSGA-II, MOEAs algorithms. All the parameter setting and operations are relatively better option for emerging Electrical Autonomous Vehicles. This work is further implemented in hardware for purpose of real time examples. The results obtained for NSGA-III are extremely very useful for better optimization and highly effectively it can be used in autonomous vehicles.
9.ACKNOWLEDGMENT
The work was done and supported us lot for our work in the communication research laboratory at KLEF.
10.REFERENCES
[1] OoskarMarko , DejanPavlović, VladimirCrnojević, KalyanmoyDeb Optimisation of Crop Configuration using NSGA-III with Categorical Genetic Operators, Due toits fast convergence and the ability to deal with many objectives, NSGA-III algorithm GECCO ’19 Companion, July 13–17, 2019, Prague, Czech Republic ©2019AssociationforComputingMachinery. ACMISBN978-1-4503-6748-6/19/07..
[2] Rajnikant H. Bhesdadiya1*, Indrajit N. Trivedi2, Pradeep Jangir1, Narottam Jangir3 and Arvind Kumar4 The main ambition of fossil fuel fired power plant management is to optimal scheduling Corresponding author: Rajnikant H. Bhesdadiya, Department of Electrical Engineering, Lukhdhirji Engineering College, Morbi, Gujarat 363641, India Bhesdadiya et al., Cogent Engineering (2016), 3: 1269383
[3] Faez Ahmed and Kalyanmoy Deb Multi-objective Optimal Path Planning Using Elitist Non-dominated Sorting Genetic Algorithms In this paper, we have considered three specific objectives of the path planning problem. Kanpur Genetic Algorithms Laboratory (KanGAL) Department of Mechanical Engineering Indian Institute of Technology Kanpur Kanpur, PIN 208016
[4] H. Bello-Salau a,⇑ , A.M. Aibinu b , Z. Wang c , A.J. Onumanyi d , E.N. Onwuka d , J.J. Dukiya e An optimized routing algorithm for vehicle ad-hoc networks In this section, This section presents an overview of some achievements reported in the literature that motivated this study. 2019 Karabuk University. Publishing services by Elsevier B.V. This is an open access article under the CC
1945
Graduate School of Agriculture, Kyoto University, Kitashirakawa Oiwake-cho, Sakyo-ku, Kyoto 606-8502, Japan
[6] Hussain S.N., Kishore K.H., Computational Optimization of Placement and Routing using Genetic Algorithm ,2016, Indian Journal of Science and Technology, Vol: 9, Issue: 47, ISSN 9746846
[7] Bala Dastagiri N., Hari Kishore K., Gunjan V.K., Janga Reddy M., Fahimuddin S.,"Geometric programming-based automation of floorplanning in ASIC physical design", Lecture Notes in Electrical Engineering, ISSN:18761100, Vol No:500, 2019, pp:463 - 468, DOI: 10.1007/978-981-13-0212-1_48.
[8] Basha M., Siva Kumar M., Pranav V.S., Rehman B.K. .," Approach to find shortest path using ant colony algorithm “, 2018, International Journal of Engineering and Technology(UAE) ,Vol: 7 ,Issue: 1 ,pp: 82 to:: 84 ,DOI: ,ISSN: 2227524X
[9] Vijaya Padma G., Hari Kishore K., Jaya Sindura S. .," Controlling the traffic interactions with high mobility and constant network connectivity by vanets “, 2018, Journal of Advanced Research in Dynamical and Control Systems ,Vol: 10 ,Issue: 6 ,pp: 588 to:: 602 ,DOI: ,ISSN: 1943023X
[10]Gopi Krishna P., Sreenivasa Ravi K., Hari Kishore K., Krishna Veni K., Siva Rao K.N., Prasad R.D. .," Design and development of bi-directional IoT gateway using ZigBee and Wi-Fi technologies with MQTT protocol “, 2018, Journal of Advanced Research in Dynamical and Control Systems ,Vol: 10 ,Issue: 7 Special Issue ,pp: 1353 to:: 1359 ,DOI: ,ISSN: 1943023X
[11]Praveen Blessington T., Bhaskara B., Noor Basha F. .," Efficient analysis for power modeling on routing topologies in three-dimensional network on chip architectures “, 2018, Progress In Electromagnetics Research C ,Vol: 85 ,Issue: ,pp: 191 to:: 208 ,DOI: 10.2528/PIERC18041906 ,ISSN: 19378718
[12]Anil Chowdary T., Durga Prasad M. .," A short paper on testability of a SoC “, 2018, International Journal of Engineering and Technology(UAE) ,Vol: 7 ,Issue: 1.5 Special Issue 5 ,pp: 77 to:: 83 ,DOI: ,ISSN: 2227524X
[13]Murali A., Hari Kishore K., Rama Krishna C.P., Kumar S., Trinadha Rao A., Integrating the reconfigurable devices using slow-changing key technique to achieve high performance,2017 Proceedings - 7th IEEE International Advanced Computing Conference,
IACC 2017, pp: 530-534, DOI:
10.1109/IACC.2017.0115, ISBN: 9.78151E+12 [14]Kalyanmoy Deb, Samir Agrawal, Amrit Pratap, and T
Meyarivan A Fast Elitist Non-dominated Sorting Genetic Algorithm for Multi-objective Optimization: NSGA-II The non-dominated sorting GA (NSGA) proposed by Srinivas and Deb in 1994 has been subjected to a number of criticism, as mentioned earlier Kanpur Genetic Algorithms Laboratory (KanGAL) Indian Institute of Teciinclogy Kanpur
Kanpur, PIN 208 016, India
{deb,samira,apratap,mary}@iitk.ac.in http://www.iitk.ac.in/kangal
[15]Bala Dastagiri N., Hari Kishore K., Vinit Kumar G., Janga Reddy M., "Reduction of kickback noise in a
high-speed, low-power domino logic-based clocked regenerative comparator", Lecture Notes in Electrical Engineering, ISSN:18761100, Vol No:500,2019, pp:439 - 447, DOI: 10.1007/978-981-13-0212-1_46 [16]. , "Design and Optimization of Piezoresistive
Materials Based Microbridge for Electro-osmosis Pressure Sensor",Transactions on Electrical and Electronic Materials, ISSN:12297607, 2019, DOI: 10.1007/s42341-019-00098-7.
[17].Babu C.N., Naga Siva Sai P., Priyanka C., Hari Kishore K., Bindu Bhargavi M., Karthik K. .," Comparative analysis of high speed carry skip adders “, 2018, International Journal of Engineering and Technology(UAE) ,Vol: 7 ,Issue: 1.5 ,pp: 26 to:: 30 ,DOI: ,ISSN: 2227524X
[18]Xiaojun Bi1 · Chao Wang1 An improved NSGA-III algorithm based on elimination operator for many-objective optimization Algorithm 1 gives the whole framework of NSGA-III-EO, which is similar to that of NSGA-III Memetic Comp. DOI 10.1007/s12293-017-0240-7
[19]Manasa M., Noorbasha F., Sudheshna C.L., Santhosh M., Naresh V., Rahman M.Z.U., Comparative analysis of cordic algorithm and taylor series expansion,2017 Journal of Theoretical and Applied Information Technology, Vol:95, issue:9, pp: 2015-2022, ISSN: 19928645