2018 International Conference on Communication, Network and Artificial Intelligence (CNAI 2018) ISBN: 978-1-60595-065-5
Methodologies for Limiting Iterative Increments for Stability
of Results of Structural Identification
Li-tao ZHANG
*Jiangsu Vocational Institute of Commerce, Longmian Road No. 180, 211168, Nanjing, P.R. China *Corresponding author
Keywords: Structural identification, Analytical models, Limiting iterative increments, Levenberg- Marquardt method.
Abstract. An iterative increment is supposed to give the corresponding vector of identification parameters with physical significance in the current iteration. In order to fulfill this requirement, methodologies for limiting iterative increments were presented as the measure to improve the stability of identification results. A constrained optimization problem was given by the transformation of conditions of limiting iterative increments and Levenberg-Marquardt method was proposed. A numerical example suggested that Levenberg-Marquardt method could not only give the solution of the constrained optimization problem but also obtain stable identification results.
Introduction
Structural identification may be implemented using analytical models with physical parameters describing the mass, stiffness, damping, constraints in boundaries, etc of the structure [1]. When they are considered as the parameters of structural identification, deterministic optimization problems may be given based on the measured data in time domain [2, 3, 4, 5].
Gauss-Newton algorithm is one of tools used extensively and effectively for solving deterministic optimization problems in the domain of structural identification [6]. It searches the space of parametric vectors for solutions minimizing objective functions. And the searching is represented by the iterative increment according to the iterative formulas of Gauss-Newton algorithm. Sequences of parametric vectors are produced with the iterative increments, and the convergent vector of the sequence is the final solution of the structural identification problem. In most cases, the iterative increment needs to be multiplied by a positive decimal referred to as ‘step size’, in order to produce physical elements for the sequence of parametric vectors.
Therefore, methods of limiting iterative increments to obtain the balance between speed of convergence and stability of identification results are studied in this contribution. The outline of this paper is presented in the next paragraph.
Firstly, the principle of limiting iterative increments is presented. Certain penalty function, which satisfies conditions of limiting iterative increments, is superimposed on the quadratic functional approximating to the objective function of structural identification. Secondly, attentions are paid to the method of limiting iterative increments, i.e., Levenberg-Marquardt method. Finally, the identification results of one numerical example using the method are given.
Problem Statement
Based on the measured data in time domain, the problem of structural identification could be transformed into the following optimization problem [7,8]:
ˆ arg min fθ
θ θ . (1)
where θˆ is the identification result of the parametric vector θ, argmin is the operator of obtaining
1
; 2i 0
T
f i i
θ s z θ
r r
(2)
where is the operator of 2-norm; s[i] is the measured data in time domain at the ith point (i= 0,…,τ-1); z[i;θ] is the simulated data at the same point with s[i] using analytical models with the parameters consisting in θ; τ is the number of data points; r is the column vector composed of
s[i]-z[i;θ].
ˆ
θ may be obtained using the following equation
θ(k) = θ(k-1) +δ(k) (3)
where δ(k) is the kth(k= 1, …, Ni ) iterative increment using the proposed limiting method.
Gauss-Newton algorithm is one of effective methods of obtaining δ(k) in Eq. (3). In this algorithm, f
θ in optimization problem (1) is replaced with an approximate quadratic function k
q δ , and δ(k) is given when q k
δ reaches a minimum value.Based on Taylor expansion of multivariable functions, the approximate quadratic functional
k
q δ is introduced as follows [9]:
f
f
k
q k
f k g kT12
TG k
(4)
where T indicates the operation of transposition; δ is an unknown vector of iterative increment;
k
f , g(k), G(k) are the 0th, 1st, 2rd derivative of f
θ at θ(k) respectively, andG(k) ≈2S(k)T S(k), g(k) = -2S(k)Tr(k) (5)
S k r
k T (6)According to the necessary and sufficient condition satisfied with the minimum value of k
q δ ,
the kth iterative increment using Gauss-Newton algorithm, denoted by GN
δ (k), is given below:
T 1 T
GN
k k k k k
δ S S S r (7)
GN
δ (k) may have the following disadvantage:
, , , ,..., , T
k k k
GN 1 GN 2 GN N
k 1 k 1 k 1
1 2 N
1 (8)
where δGN, i (k), θi(k-1) are the ith (i= 1,…,N) components of the vector of δGN(k), θ(k-1) respectively. The above case may appear that |δGN, i(k) /θi (k-1)|1, so that θi(k) (=θi(k-1)+δGN, i(k) ), the component of θ(k), is smaller than 0, which is inconsistent with the fact that identification parameters have physical interpretations only when they are positive values. Therefore, the iterative increment should fulfill the following requirement
, ,...,
T
N
1 2
k 1 k 1 k 1
1 2 N
(9)
Combining the condition shown in Eq. (9) with k
q δ in Eq. (4), produces the constrained
optimization problem to be solved with the proposed methods of limiting iterative increments:
= arg min ,
. . ,...,
k
T
N 1
k 1 k 1
1 N
q
s t
k δ δ δ (10)
where s.t., the abbreviation of ‘subject to’, indicates the constraint condition. The following section will discuss the method of gaining k
LM
δ , i.e. Levenberg-Marquardt
method.
Levenberg-Marquardt Method
In Levenberg-Marquardt method, Eq. (10) is transformed into a minimization problem. Firstly Lagrange multiplier in this problem shown by is obtained with the bisection method, and then
k LM
δ can be obtained based on .
Simplicity of the Constraint Condition of Iterative Increments
Based on the definition of 2-norm, Eq. (10) is transformed into
= arg min ,
. . k 2 N i k 1
i 1 i
q
s t
k LM δ δ δ (11)For clarity, let L(k-1) denote a diagonal matrix whose elements are the reciprocals of θ1(k-1) ,…,θN(k-1), and Eq. (11) can be rewritten as
= arg min ,
. .
k
2 T
q
s t
k
LM δ
k -1
δ δ
δ L δ
(12)
The Iterative Increment Given by Levenberg-Marquardt Method
The solution of the constrained optimization problem shown in Eq. (12), expressed by δLM, is
LM
GNk
,if
kTL2
k
L1 a
i i
vpi,if
kTL2
k
(13)
where δGN
(k) is given by Eq. (7); /
i i
a (pi2+ ); i vpiTSpTr; pi is the ith singular value of
Sp; can be obtained by the bisection method.
Case Study
Four-DOF Spring-mass System
A spring-mass system was taken in the case study to show the effectiveness of the method proposed in this work. The system was indicated in Figure 1, and F1~ F4 represented horizontal excitations excited on each of 4 masses; k1~ k4 were horizontal stiffness of the 4 springs. All modal damping
in time domain was acceleration response of the masses, to which 10% white noise was added in order to simulate errors in measured data. Sampling interval was 0.001s.
[image:4.612.205.409.218.309.2]Figure 1. Four-DOF spring-mass system.
Table 1. Structural parameters of the spring-mass system shown in Figure 1.
i Mass mi [kg]
Stiffness ki [104 kN/m]
Initial values Accurate values
1 3430.2 6.79 1.967
2 2630.2 6.79 6.79
3 2630.2 6.79 1.967
4 1798.8 6.79 6.79
Structural parameters of the spring-mass system were given in Table 1. Initial values, i.e. the 3rd column in Table 1, represented stiffness of springs in certain assumed state of the system, and were regarded as the initial values of iterative calculations using Gauss-Newton algorithm. Accurate values, namely the 4th column in Table 1, were those in real state of the system used for producing simulated measured data in time domain.
Work to be done in this case study was to give identification results using Levenberg-Marquardt method. In this case, θ was composed of k1~ k4 and f
θ in Eq. (1) constructed based onacceleration responses in m4.
Identification Results given by Levenberg-Marquardt Method
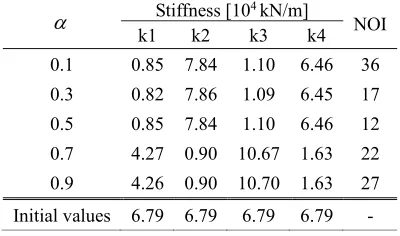
Different identification results from different were recorded in Table 2, in which NOI represented number of iterations for convergence. The results given by = 0.5 were the most stable in Table 2, and the iterative process was plotted in Figure 2 (b). The rates of change of the convergent values shown in Figure 2 (b) were –87.48%, 15.46%, –83.80% and –4.86% respectively. Because those for the accurate values in Table 2 were –71%, 0, –71% and 0 respectively, maximum error of the results in Table 2 was 16.48% for k1. Conclusion could be made that the stability of identification results using Levenberg-Marquardt method was good.
Table 2. Identification results of k1~k4 using Levenberg-Marquardt method.
k1 Stiffness [10k2 k3 4 kN/m] k4 NOI
0.1 0.85 7.84 1.10 6.46 36 0.3 0.82 7.86 1.09 6.45 17 0.5 0.85 7.84 1.10 6.46 12 0.7 4.27 0.90 10.67 1.63 22 0.9 4.26 0.90 10.70 1.63 27 Initial values 6.79 6.79 6.79 6.79 -
m4
k1
m1
k2
m2
k3
m3
k4
[image:4.612.206.406.573.691.2]Figure 2. Iterative process of k1~ k4 given by = 0.5 using Levenberg-Marquardt method.
For further analysis of effects of Levenberg-Marquardt method on the iterative process shown in Figure 2 (b), the lines in Figure 2 (a) depicted relationship between rci (=pi2/ (pi2+ ) ) ( i= 1, …, 4) and number of the iterations. Meanwhile, solid points in Figure 2 (a) expressed cond(S(k)). According to Eq. (13), rci depends mainly on cond(S(k)) as well as ||r||, and varies inversely with both of them. Figure 2 (a) was consistent with this conclusion.
Summary
In order to ensure the physical significance of θ(k), one method of limiting iterative increments used for structural identification were studied in this paper. The case studies showed that the method was not only able to obtain physically significant θ (k), but also to improve stability of identification results.
A constrained optimization problem, which was related closely to the proposed method, was given in this work. Its objective function was the quadratic functional approximating to the objective function of the problem of structural identification, and the solution needed to satisfy conditions of limiting iterative increments.
With one spring-mass system taken as the numerical example, the identification results, given by Levenberg-Marquardt method, were rather stable, which demonstrated improvements of Levenberg-Marquardt method on stability of identification results.
Acknowledgement
This research was financially supported by the School Science Foundation of Jiangsu Vocational Institute of Commerce.
References
[1] S.W. Doebling, C.R. Farrar, The state of the art in structural identification of constructed facilities, A report by the ASCE committee on structural identification of constructed facilities, 1999.
[2] C.P. Fritzen, D. Jennewein and T. Kiefer, Damage detection based on model updating methods, Mech. Syst. Signal. Pr., 12 (1998) 163-186.
[3] X.L. Ling, A. Haldar, Element level system identification with unknown input with Rayleigh damping, J. Eng. Mech.-ASCE, 130(2004) 877-885.
[4] S.S. Law, Z.R. Lu, Crack identification in beam from dynamic responses, J. Sound Vib., 285(2005) 967-987.
[5] J.S. Kang, S.K. Park, S. Shin and H. S. Lee, Structural system identification in time domain using measured acceleration, J. Sound Vib., 288(2005) 215-234.
Number of iterations
Stif
fn
ess / (
10
4 kN
/m
)
C
ond
(
S
(k))
(a) (b)
1 3 5 7 9 11 0
9 18 27 36 45
1 3 5 7 9 11 0 0.2 0.4 0.6 0.8 1
rc1 rc2 rc3
rc 4
cond(S(k))
1 3 5 7 9 11 0
3 6 9
k 1
k2
k 3 k4
[6] M.I. Friswell, J.E. Mottershead, Finite element model updating in structural dynamics, Kluwer Academic Publishers, Dordrecht/ Boston/ London, 1995.
[7] H.T. Banks, D.J. Inman, D.J. Leo and Y. Wang, An experimentally validated damage detection theory in smart structures, J. Sound Vib., 191(1996) 859-880.
[8] S.H. Carneiro, Model-based vibration diagnostic of cracked beams in the time domain, the Virginia Polytechnic Institute and State University, Blacksburg, 2000.