2017 2nd International Conference on Artificial Intelligence and Engineering Applications (AIEA 2017)
ISBN: 978-1-60595-485-1
A Navigation of an Indoor Autonomous Mobile
Robot Based on Fuzzy Logic Method
YUAN LI, GUANGYUAN FU and MING WU
ABSTRACT
With the continuous movement of mobile robots in the actual environment, it will encounter some obstacles inevitably. In order to make it better to overcome the uncertainty of the environment and solve the problem which the environment has no prior information, this paper does research on the indoor autonomous mobile robot navigation based on fuzzy logic method. Whether the environment has obstacles or not, this paper uses fuzzy logic for autonomous navigation, but also uses infrared sensors to avoid obstacles as far as possible. As the result, it not only improves the adaptability of the mobile robot for the dynamic environment, but also deals with all kinds of emergencies well, and it also has good robustness. Finally, the validity and feasibility of the method are proved by simulation.
KEYWORDS
Autonomous mobile robot, navigation, fuzzy logic, visual sensor, infrared sensor.
INTRODUCTION
Navigation of robot is a technique that uses sensors primarily to guide robots to avoid static (or dynamic) obstructions reaching the destination or according to an expected path in the environment [1] [2]. In the past few decades, the navigation problem of autonomous mobile robot in the unknown environment has been widespread concern. Through the positioning of obstacles, the mobile robot system can plan a suitable path so that the robot will avoid the obstacles successfully and move the previously scheduled path [3].
The navigation mechanism of this paper used is no map navigation, which is the most promising method compared to the previous approach, because the entire navigation bases on no map and is a kind of stressful navigation. No map navigation is through the observation directly, features (walls, tables, corridors, corners and other natural objects) identification and features tracking to extract the important online environment information, and then use the navigation algorithm to make the corresponding "response" according to the useful information [2][3][4].
_________________________________________
Yuan Li, Xi’an Research Institute of High-Technology, Xi’an, Shanxi, China; [email protected]
the traditional method has some errors in practical applications, and the character of real-time is not obvious. For these reasons, fuzzy logic has attracted much attention because it does not need to establish accurate mathematical model, deal with uncertain information easily and can transform expert knowledge into input directly and so on. As the result of the sensor information obtained by the autonomous mobile robot is dynamic and uncertain in the process of moving , this paper uses the method based on fuzzy logic to track the path, and it can deal with the uncertain situation well. What’s more, it realizes the autonomous navigation of the mobile robot.
OVERVIEW ABOUT FUZZY LOGIC METHOD
Fuzzy Logic Method
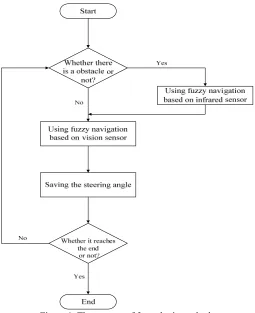
Figure 1. The process of fuzzy logic method.
Figure 2. The relationship between distance and speed.
Avoiding Obstacle Method
CONTROLLING SPEED
[image:3.612.164.424.384.537.2]CONTROLLING DIRECTION
Different from the method of control speed, this method that changing the direction of the mobile robot dynamically so that achieving the purpose of obstacle avoidance. According to the position of the robot, the method controls it to move along a larger free space and when the distance between the side and the obstacle is large, the mobile robot moves along the side.
Fuzzy Navigation Based On Vision Sensor
If the mobile robot detects that there is no obstacle in front, it will use the fuzzy navigation based on the vision sensor [8] [9]. Processes as follow:
ACQUIRING THE IMAGE
An image is acquired in a continuous video stream which taken in a camera on a mobile robot, and it also contains all visual information for the unknown environment in front. Then, extracting the useful information from the image: transforming the color image into a gray scale image, and the corresponding image processing is performed.
EXTRACTING THE PATH
In order to extract the effective path from the environment, the gray scale image needs to be segmented. Firstly, it is necessary to deny the image, that is, minimizing external interference and this paper uses the mean filter method. Then, adjusting the brightness, the reason why the image is dark is that their own influence, you can change the brightness value to enhance the overall brightness. Finally, according to the image and extracting the effective path.
FUZZY NAVIGATION
According to the obtained image, selecting a center pointAon the vertical center line and representing the actual position of the mobile robot by the center point. RegardingAas the center, then, scanning left and right sides and determining the width who’s left and right sides of mobile robots by calculating the number of pixels. If the number of pixels on both sides is the same approximately, the mobile robot will be located at the center line of the path; else, the number of pixels on the left (right) side is more than the right (left) side, the mobile robot will be located on the right (left) side of the bias path. As a result, it is necessary to control the robot to move to the left (right) side of the path in order to allow it to along the center of the path.
THE REPRESENTATION OF THE CORRELATION FUNCTION
Fuzzy input function:
LC(Left-Count) represents the number of pixels at the center point along the
scanning line to the left; RC(Right-Count) represents the number of pixels at the
center point along the scanning line to the left. Both equations of LC and RC set
(1) ~ (6).
L L L L L L S S LC S S S LC S S LC LC 1 2 1 2 2 1 0 1 , , (1) L L L L L L L L L L M M LC M M M LC M M LC M S M M LC LC 3 2 2 3 3 2 1 1 2 1 , , (2) LC B B LC B B B B LC LC L L L L L L B 2 2 1 1 2 1 1, , (3) R R R R R R S S RC S S S RC S R RC RC 2 1 1 2 2 1 0 1 , , (4) R R R R R R R R R R M M RC M M M RC M M RC M S M M RC RC 3 2 2 3 3 2 1 1 2 1 , , (5) RC B B RC B B B B RC RC R R R R R R B 2 2 1 1 2 1 1, , (6) Mark:
S M B
X
x1 i1 , , , x2 Xi2
S,M,B
(7)Input the variablei: the value of the fuzzy rule i ; Fuzzy rulei:
2 1 j j i x LCi or
2 1 j j i x RC
i ; (8)
T N
1, 2,, ,
N
i i N
i i i
1 1
; (9)
Output angular velocity vector :
TN
1, 2,, ,
N
i i N
i i i
1 1
(10)
In order to ensure that the steering of the mobile robot is correct, it is necessary to repeat the scanning sides of the left and right to determine the accumulated values LPk and RPk of the sampling timek, that is, repeating the process in the
process of processing each frame. So, determining two cumulative values from the preservation is the final result. However, when saving the results, the corresponding priority will be reduced as time decreases, in other words, the sampling has the highest priority at the current time. Expressed as:
1 2
1
k k
k k LP k LN
LN (11)
1 2
1
k k
k k RP k RN
RN (12)
Set the feature factor k1 0.3 andk2 0.7, when the mobile robot use the fuzzy
navigation based on the vision sensor, the accumulated value will be always preserved; when encountered some unexpected situations, the mobile robot maybe deviated from the path, besides,LPk and RPk are zero, then the preservative value
will play a role. Then, according to the relevant rules, selecting the effective steering: If LNk and RNk both are positive, then the robot will take direction
[image:6.612.118.499.55.219.2]clockwise; else, making it detour counterclockwise.
TABLE 1. GENERAL FUZZY RULE.
Rule Number Left-Count Right-Count
1 S S 0.9 90
2 S M 0.5 65
3 S B 0.1 40
4 M S 0.5 115
5 M M 0.9 90
6 M B 0.5 65
7 B S 0.1 140
8 B M 0.5 115
SUDDEN SITUATION
In the actual environment, the mobile robot may be deviated from the center line of the path seriously. In this case, the direction of movement should be controlled so as to return to the center line to prevent collision with the obstacle. If the previous direction towards to the left, the robot need to move clockwise; on the other hand, turning it counterclockwise.
Fuzzy Navigation Based On Infrared Sensor
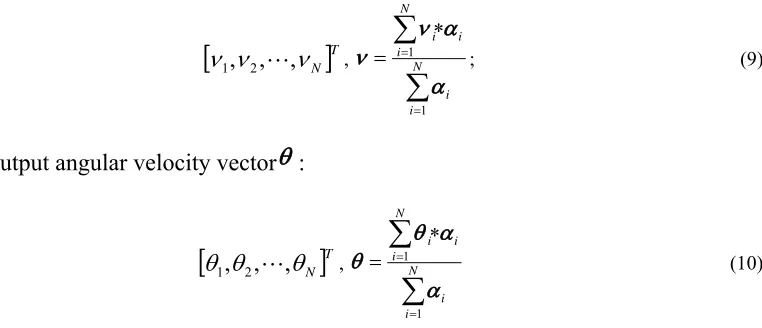
If obstacle is detected in the front, the mobile robot will use fuzzy navigation based on the infrared sensor. During this period, it is no longer use the fuzzy navigation based on the vision sensor. Instead, the mobile robot can be obstructed effectively by the infrared sensor. Then, it continues to use the vision sensor so that making the robot move along the center line of the original path. In the fuzzy navigation which based on infrared sensors, each infrared sensor is scanned at eight angles, resulting in eight corresponding readings. Divide these readings into three groups: Group(l),l1,2,3,and it can reduce the amount of input effectively. In each set of readings, selecting the maximum reading as the final reading, because the reading reflects the distance of the barrier: the smaller the reading, indicating the farther the obstacle; otherwise, the larger the reading, indicating the closer the obstacle.
THE REPRESENTATION OF THE CORRELATION FUNCTION IN THIS METHOD
Three sets of readings are expressed as:
) 3 , 2 , 1 | ) ( max( ) 1
( Sensor l l
Group (13)
) 5 , 4 | ) ( max( ) 2
( Sensor l l
Group (14)
) 8 , 7 , 6 | ) ( max( ) 3
( Sensor l l
Group (15)
Fuzzifying the input function of each group:
The three sets of functions are: F(Far), M (Middle) and N (Near), the equation set (16) ~ (18):
TABLE 2. FUZZY RULE WHEN AVOIDING OBSTACLE.
Rule Number Group(1) Group(2) Group(3)
1 F F F 0.8 0
2 F F M 0.8 90
3 F F N 0.7 90
4 F M F 0.5 125
5 F M M 0.7 125
6 F M N 0.6 150
7 F N F 0.3 125
8 F N M 0.5 125
9 F N N 0.4 160
10 M F F 0.9 90
11 M F M 0.8 90
12 M F N 0.6 90
13 M M F 0.7 60
14 M M M 0.3 90
15 M M N 0.2 115
16 M N F 0.5 45
17 M N M 0.2 115
18 M N N 0.1 45
19 N F F 0.8 90
20 N F M 0.7 90
21 N F N 0.6 90
22 N M F 0.5 60
23 N M M 0.2 45
24 N M N 0.1 90
25 N N F 0.4 40
26 N N M 0.1 25
[image:8.612.182.414.489.682.2]27 N N N 0 90
) ( 1 ) ( ) ( )) ( ( 2 2 1 1 2 1 l Group N N l Group N N N N l Group l Group N l l l l l l , , (18) Mark:
, ,
, 11 Y F M N
y i y2 Yi2
F,M,N
, y3Yi3
F,M,N
(19)Input the variablei: the value of the fuzzy rule i ; Fuzzy rulei:
3 1 j j i y Fi or
3 1 j j i y M
i or
3 1 j j i y N
i ; (20)
L: The total number of fuzzy rules; Output linear velocity vector:
TL
1, 2,, ,
L i i L i i i 1 1 ; (21)
Output angular velocity vector :
TN
1, 2,, ,
N i i N i i i 1 1 ; (22)
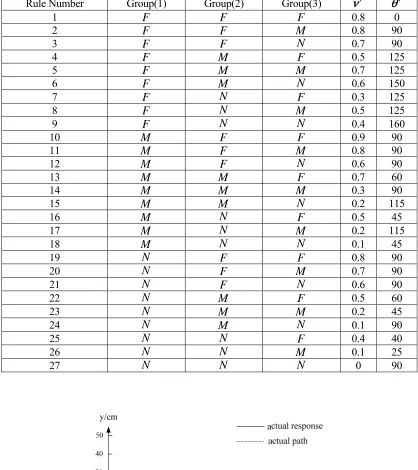
SIMULATION EXPERIMENT
In the experiment, the autonomous mobile robot is designed to move along the curve, and the width of the path is required to be smaller than the size of the mobile robot. Observing whether the mobile robot moves along the middle line of the path or not. In this experiment, the method use the fuzzy navigation based on visual sensors and infrared sensors.
CONCLUSION
This paper mainly researches a method that the path navigation of the autonomous mobile robot according to the fuzzy logic method in the indoor environment. When there is no obstacle in the front of the mobile robot, the fuzzy navigation based on the visual sensor will be used. Once the obstacle is detected, the fuzzy navigation based on the infrared sensor will be adopted. After avoiding the obstacle successfully, it will continue to take the fuzzy navigation based on the visual sensor. However, whether the obstacle is presence or absence, the mobile robot moves along the center of the path. In this paper, the autonomous mobile robot is experimented in the real experimental environment, and it is proved that the fuzzy navigation is better than previous methods. Also, it is experimental and effective. The disadvantage is that in the process of the experiment, the situation is considered to be too simple, and the method should be tested in more complex situations in order to be better on improving and enriching the fuzzy logic method.
REFERENCES
1. Ismail, A.H., Ramli, H.R. (2009) Vision-based system for line following mobile robot. IEEE Symposium on Industrial Electronics and Applications (ISIEA), Malaysia, pp. 642-645.
2. Nirmal Singh, N. (2010) Vision Based Autonomous Navigation of Mobile Robots. Ph.D. Thesis, Jadavpur University, Kolkata, India.
3. Gasper, J., winters, N. (2000) Vision-based navigation and environmental representation with an ominidirectional camera. IEEE Transactions on Robotics and Automation 16(6), 890-898.
4. Chen, Z. (2006) Qualitative Vision-based Mobile Robot Navigation. IEEE International Conference on Robotics and Automation, Orlando, Florida.
5. Martin, M.C. (2006) Evolving visual sonar: Depth from monocular images. Pattern Recognition Letters 27 (11), 1174-1180.
6. Chatterjee, A., Ray, O., Rashid. A. (2011) Development of a Real-Life EKF based SLAM System for Mobile Robots employing Vision Sensing. Expert Systems with Applications 38(7), 8266-8274. 7. Murray, D., Little, J.J. (2000) Using real-time stereo vision for mobile robot navigation.
Autonomous Robots 8, 161-171.
8. Newman, P., Bosse, M., Leonard, J. (2003) Autonomous feature -based exploration. Proc. Internation Conference on Robotics and Automation (ICPA), Taipei, 1234-1240.
9. Jung, C.R., Kelber, C.R. (2005) Lane following and lane departure using a linear-parabolic model. Image and Vision Computing 23(13), 1192-1302.
10. Aider, O.A. (1998) A model-based method for indoor mobile robot localization using monocular vision and straight-line correspondences. Robotics and Automation 14(6), 969-978.