A Genetic Algorithm-based Technique to Enhance
Controller:
Stabilizes Acceleration in PMSM
T.S. Viswanath1
Asst.Prof REC Bhalki KA
Dr.Subhash S K2
Principal JPNCE, Mahabubnagar Abstract
In recent years, a high class evolution has been achieved by control systems in different application areas. Acceleration control in Permanent Magnet Synchronous Motor is one among the noteworthy applications of evolving control systems. Though numerous methodologies have been proposed in the literature, they perform the control operations statically. Moreover, controllers are very rarely used for this purpose. This leads to the problem of delayed stability in the acceleration/velocity control of Permanent Magnet Synchronous Motor. In this paper, a Genetic Algorithm-based technique is proposed to accomplish effective stability in Permanent Magnet Synchronous Motor controlling operations. This technique introduces multiples of rotor mass (considered without load), along with the system parameters. A GA-based optimization is performed over the considered system parameters and so acceleration achieves stability in a very short time. The proposed technique is tested with a standard
H
problem and the results are evaluated by comparing them with that of an existing H-infinity control technique. The implementation results have shown that the proposed technique achieves stability of acceleration as well as velocity in a much shorter time compared to the existing technique.Keywords: Controller, Genetic Algorithm (GA), Permanent Magnet Synchronous Motor (PMSM), Stability, Acceleration.
1. Introduction
A device or a set of devices that handle, instruct, guide, or adjust the behavior of the other devices or systems [1] [15] is termed as a control system. Components such as sensors, control computers [2] [18] are present in a control system. Numerical modeling of the regulator actuators, control plants, connecting linkages, essential operating devices and digital [3] is used to analyze the operating mechanism of the control system. Controlling the design structure and operating parameters of a system are essential to attain adequate response time for queries and problem reports [4]. Depending on the type of signal that is required to be handled, control systems are normally based on either classical control theory or modern control theory.
Control theory is an interdisciplinary field of engineering and mathematics that is concerned with the behavior of a system [6]. The behavior of systems that exhibit a repetitive pattern can be categorized as deterministic [20]. H-infinity methods are used in control theory for constructing controllers with robust performance or stabilization [7]. For speed or position control problems of Permanent Magnet Synchronous Motors (PMSM), modern control techniques, for example sliding mode control, feedback linearization control, adaptive control, back stepping principles, and Fuzzy logic control are employed [25]. The direct applicability of H-infinity control method to problems concerning multivariable systems is an advantage of the of H-infinity control method over classical control methods [26]. In terms of computational burden, the design of H-infinity controller is comparatively simpler than that of the μ-synthesis technique. [8] [9]. For resolving the unbiased-ness condition of the estimation error, the control gain of H-infinity technique is used [12]. The closed-loop variables of PMSM in the presence of plant uncertainties and external disturbances can be controlled by the powerful method called H-infinity robust control [11].
The knowledge of rotor position and speed are required by the controller of permanent magnet synchronous motor
H
H
Some of the recent research works that are related to the control of PMSM and the works that deal with controller are reviewed in the next section.
3. GA-based System Design Technique to Enhance the
H
Control OperationA novel approach, which is based on Genetic algorithm, is proposed to improve the controlling performance of the H-infinity controller of PMSM. As stated earlier, most of the techniques have used GA for the purpose of statically optimizing the controller parameters. Our work differs because it utilizes GA to perform a multi-objective optimization of system parameters. Hence it facilitates the improvement of the controlling performance of the H-infinity controller of PMSM. Prior to describing the proposed technique, analyzing the system model and the standard H-infinity problem are essential.
Here, the model of PMSM is analyzed in the
d
q
coordinate system, which is a reference frame that rotates synchronously [5]. The flux linkage equations and voltage equations of the PMSMd
q
model are given below.(1)
(2)
In Eq. (1),
d,
q,
p andL
d ,L
q,L
p andI
d,I
q,I
p, are flux linkage, inductance and current of the direct axis, quadrature axis and permanent magnet, respectively. In Eq. (2),V
d andV
q are the armature voltages of the direct axis and quadrature axis respectively.R
is the phase resistance,
is the electrical angular velocity and' d
L
andL
'qare the rate of change ofL
d andL
q with respect to time, respectively. Withf
cas the total friction coefficient and
as the velocity, the state and output equations can be represented as,(3)
Cx
y
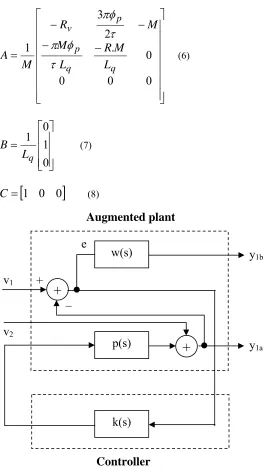
(4)Where,
qI
v
x
(5)
H
p d p q d p q dI
I
I
L
L
L
q0
0
0
0
0
0
P P q d q d q dI
L
0
L
R
L
L
L
R
V
V
' 'Bv
Ax
x
(6)
0
1
0
1
q
L
B
(7)
1
0
0
C
(8)Figure 1: The standard
H
problemA standard H-infinity problem [5] which introduces a weight function to output the error is depicted in Fig. 1. The closed loop transfer function can be represented as,
(9)
Where,
W
s
is the weight function andS
s
is the sensitivity function. In order to make the system internally stable and to minimize the norm ofT
zw(s
)
, an optimum feedback controller is found out by formulating
0
0
0
0
.
2
3
1
q q
p
p v
L
M
R
L
M
M
R
M
A
s
W
s
S
s
T
zw
H
K
s
v
2_
+
e
w(s)
+
p(s)
+
k(s)
v
1y
1by
1a0
)
(
min
T
zws
k (10)
To minimize the H infinity norm, the controller parameters has to be optimized. Here, the optimization is done by determining the system parameters through GA. The GA based system parameters optimization is detailed below. 3.1. Parameters Optimization
The GA plays a major role in optimizing the system and controller parameters and in obtaining an optimal H-infinity controller. Let
N
T be the number of system parameters to be optimized. The parameters are considered to be multi-objective parameters. Assuming the target parameters to be the gene of the chromosomes, arbitrary chromosomes of lengthN
T are generated. The generated chromosomes can be represented as,
()
1 ) ( 1 ) (0 Ni
i i i T
x
x
x
X
; ,0
j
N
T
1
(11)where,
x
(ji)is thej
th gene of thi
chromosome,N
P is the population pool andN
T is the number of target parameters. Here, the target parameters considered for optimization areq
L
,m
,R
v,
and
i.e.N
T
5
. Every gene of the chromosome is generated arbitrarily within their corresponding minimum and maximum intervals i.e.x
0(i)
L
minq,
L
minq
,x
1(i)
R
vmin,
R
vmax
,
min max
) (
2
m
,m
x
i
,x
3(i)
min,
max
andx
4(i)
min,
max
. The generated gene values are subjected to check whether it satisfies the controllability constraints or not. If any of the chromosomes does not satisfy the controllability constraints, a new chromosome is generated repeatedly until it is satisfied. The controllability constraints are checked by generating a state space model using the gene values of the generated chromosome. For the state space model, the controllability matrixH
is then determined. The constraint can be expressed asN
1
H
rank
H
T, where,N
1is the row size of the matrixH
,H
rank is the rank of the matrixH
andH
T is the controllability threshold. Thus,N
P chromosomes are generated and the population pool is filled up.The fitness of the chromosomes that are in the population pool is determined. To determine the fitness of the chromosomes, initially, matrices of dimensions
A
andB
are determined as follows
0
0
0
0
2
3
1
) ( 0 ) ( 3 ) ( 2 ) ( 0 ) ( 3 ) ( 2 ) ( 3 ) ( 2 ) ( 1 ) ( 3 ) ( 2 ) ( i i i i p i i i i p i i i ix
x
x
R
x
x
x
x
x
x
x
x
A
(12)1
0
1
0
1
) ( 0 ) (
i i
x
B
(13)With the matrices of dimension and the other system parameters, the system and the process P(s) are developed as follows
D
C
B
A
s
P
i i
i) () ()
(
(
)
(14)Where,
D
0
. Considering the system parameters and the plant function, the fitness can be determined asi N i i
P
f
1
min
arg
] 1 , 0
[
(15)From the fitness function, the chromosomes that have maximum fitness are placed in the selection pool and the optimal solution for the H-infinity control problem can be determined as
||
)
(
||
min
arg
T
zws
(16)The fittest
N
p/
2
chromosomes that are present in the arbitrary population pool are selected and they are subjectedto the genetic operations, crossover and mutation.
In the crossover operation, an exchange of genes is performed between the two parent chromosomes. The crossover is performed with a crossover rate of
C
r i.e.C
r.
N
T genes are exchanged between two parent chromosomes. Hence, a child chromosomeX
child is obtained for a pair of parent chromosomes. In this manner,N
p/2 parent chromosomes are selected in sequence from the selection pool and the crossover operation is performed on them. Hence, newN
p/2 child chromosomes are obtained from the crossover operation. After crossover operation, the chromosomes are subjected to the next genetic operation called mutation.Mutation is an operation that mutates the genes of the chromosomes to obtain new chromosomes. In our approach, an adaptive mutation is performed for fast convergence of the solution with a mutation rate of
M
r. The mutation rate decides the number of genes to be mutated. The mutation operation performed over a child chromosome is described as follows A fittest chromosome, say
X
fit, is selected from the selection pool i.e. the chromosome which has the maximum fitness among all the chromosomes that are present in the selection pool
fit j k j k j k j fit j k j k j fit j k j k j k j new jx
x
if
x
x
x
x
if
x
x
x
if
x
x
x
k ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) (;
1
;
;
1
(17) The genes of the obtained new chromosomes are modified such that the following criterion is satisfied.
(18)
In Eq. (17),
x
(jk),x
jfitand newkj
x
are the genes of children chromosomes that are obtained after performing crossover, genes of the fittest chromosome and genes of the newly obtained chromosome, respectively. Hence, all the genes present in the chromosomes are modified as per the fitness function. As this process relies on the fittest chromosome, quick convergence can be accomplished. At the end of mutation,N
p/2new chromosomesX
new are obtained. For theN
p/2new chromosomes, fitness is determined using the Eq. (15). The entire process is repeated forI
max iterations. Once it reachesI
max iterations, the process is terminated. The chromosome with maximum fitness present in the selection pool is chosen as the best system parameters. On the basis of these parameters the system and the controller are developed. The obtained optimal H-infinity controller can work satisfactorily for all the given system parameters. Hence, the system can offer a good stabilization over the velocity, which is considered as the system output. From the obtained velocity, the acceleration can be determined [5] as
F
mf
R
v
m
bestdt
dv
/
/
(19)where, is the output electromagnetic thrust, is the total friction,
R
v is the damper coefficient,v
is thevelocity output obtained from the system and
m
best is the best mass value obtained from the proposed technique.
4. Results and Discussion
The proposed technique was implemented in the working platform of MATLAB (version 7.10). The system parameters and controller parameters were optimized by the proposed technique. For the optimization process, the chromosomes were generated with a length of
N
T
5
. Every gene of the chromosome was generated within their minimum and maximum limits. The limits selected for the proposed technique are given in the Table ITable I: System parameters utilized in the proposed technique
S.No Parameters Values
1
L
minq,
R
vmin,
m
min,
min,
o
min 10 2L
maxq,
R
xmin,
m
min,
min,
o
min 403
C
p 0.64
I
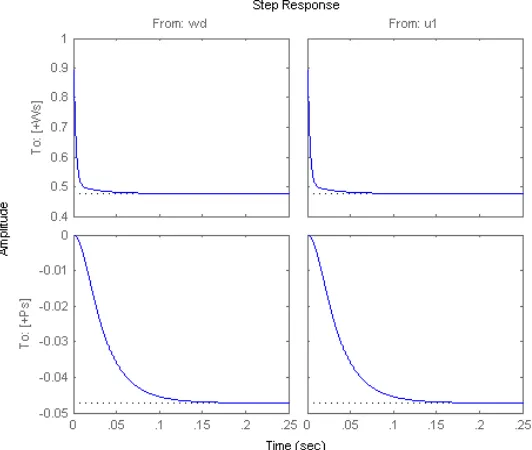
max 25Figure 3: Responses at different blocks m used in the standard
H
problem.Figure 4: Performance of GA in optimizing the system parameters
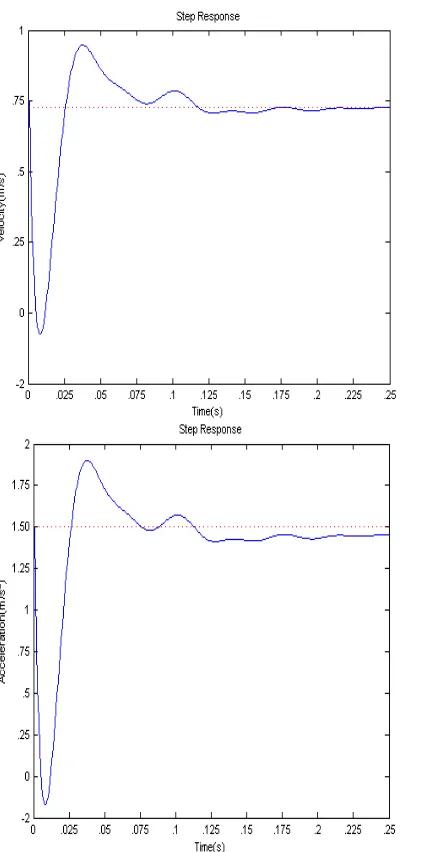
From Fig. 2, the stabilization achieved by the proposed technique in the subjected system can be seen. The response obtained at different block levels of the system, which was depicted in Fig. 1, is given in Fig. 3. Fig. 4 illustrates the GA performance in convergence to the solution of determining optimal system parameters. From the Fig. 2, it can be seen that the proposed system becomes stable in 0.125 sec. But in [5], the system takes a longer time of 0.8 sec to
become stable. Hence, it can be visualized that the proposed technique aids in improving the performance of the
5. Conclusion
In this paper, a GA-based H-infinity optimization technique was proposed to achieve stability in PMSM. The proposed technique optimizes the system parameters with respect to the
H
norm. The proposed technique was implemented and evaluated with a standardH
problem. The implementation results have illustrated that the proposed technique accomplished acceleration as well as velocity stability in a much shorter time compared to the existingH
control technique. This is mainly because of the introduction of the parameter, multiple of rotor mass, which was compared with the rotor mass with/without load. Because of the consideration of the selected parameters, a robust and optimalH
controller is developed. Moreover, in GA, by making the mutation adaptive, the convergence rate was considerably improved, which is also one of the reasons behind the accomplishment of stability in a shorter period. The achievement of stability in acceleration/velocity illustrates that the proposed technique offers an effective means for controlling the PMSM when it operates with aH
controller.References
[1] Rosslin John Robles and Min-kyu Choi, "Assessment of the Vulnerabilities of SCADA, Control Systems and Critical Infrastructure Systems", International Journal of Grid and Distributed Computing, Vol.2, No.2, pp.27-34, June 2009
[2] M. Sghairi, A. de Bonneval, Y. Crouzet, J.J. Aubert and P. Brot, "Challenges in Building Fault -Tolerant Flight Control System for a Civil Aircraft", IAENG International Journal of Computer Science, Vol.35, No.4, November 2008
[3] Sanghoon Lee, David T. Eddington, Youngmin Kim, Wooseung Kim, and David J. Beebe, "Control Mechanism of an Organic Self-Regulating Micro fluidic System", Journal of Micro electromechanical Systems, Vol.12, No.6, pp.848-854, December 2003
[4] Reda Ammar, Howard Sholl, and Ahmed Mohamed, "Performance Modeling of a Power Management/Control System", International Journal of Computing & Information Sciences, Vol.1, No.1, pp.18-24, December 2003
[5] Yuan-Rui Chen, Cheung, N.C., Jie Wu, “
H
Robust Control of Permanent Magnet Linear Synchronous Motor in High-Performance Motion System with Large Parametric Uncertainty”, IEEE 33rd Annual Power Electronics Specialists Conference, Vol.2, p. p. 535 – 539, 2002[6] Aboubekeur Hamdi-Cherif, "Intelligent Control and Biological Regulation for Bioinformatics", International Journal of Mathematical Models and Methods in Applied Sciences, Vol.4, No.2, pp.93-104, 2010
[7] V.Barbu and S.S.Sritharan, "H infinity-control theory of fluid dynamics", Journal of the Royal Socity, Vol.454, pp.3009-3033, 1998 [8] Jayapal and J.K.Mendiratta, "H infinity Controller Design for a SMIB Based PSS Model 1.1", Journal of Theoretical and Applied
Information Technology, Vol.11, No.1, pp.73-82, 2005
[9] Konstantinos Michail, Argyrios Zolotas, Roger Goodall, and John Pearson, "Sensor Optimisation via H-infinity Applied to a MAGLEV Suspension System", International Journal of Electrical, Computer, and Systems Engineering, Vol.3, No.3, pp.143-149, 2009
[10] David Saltiveri, Antoni Arias and Greg Asher, "Sensor less Control of Surface Mounted Permanent Magnet Synchronous Motors Using Matrix Converters", Journal of Electrical Power Quality and Utilisation, Vol.10, No.1, pp.59-67, 2006
[11] A.G. Aissaoui, M. Abid and A. Tahour A. C. Megherbi, "A Fuzzy Logic and Variable Structure Control for Permanent Magnet Synchronous Motors", International Journal of Systems Control, Vol.1, No.1, pp.13-21, 2010
[12] M. Zasadzinski, H. Souley Ali and M. Darouach, "Robust Reduced Order H infinity Control via an Unbiased Observer", International Journal on Science and Techniques of Automatic Control and Computer Engineering, Vol.1, No.1, pp.261-275, 2007
[13] Grouz Fa ten and Sbita Lassaad, "Speed Sensor less IFOC of PMSM Based on Adaptive Luenberger Observer", International Journal of Electrical and Electronics Engineering, Vol.2, No.1, pp.7-13, 2009
[14] Pragasen Pillay and Ramu Krishnan, "Modeling, Simulation, and Analysis of Magnet Motor Drives, Part I: The Permanent-Magnet Synchronous Motor Drive", IEEE Transaction on Industry Applications, Vol.25, No.2, pp.265-273, April 1989
[15] Mariana Hentea, "Improving Security for SCADA Control Systems", Interdisciplinary Journal of Information, Knowledge, and Management, Vol.3, pp.73-86, 2008
[16] Mohamed I. Abu El-Sebah, "PMSM Position Control with a SUI PID Controller", Journal of Power Electronics, Vol.10, No.2, pp.171-175, March 2010
[17] Kittithuch Paponpen and Mongkol Konghirun, "Speed Sensor less Control of PMSM Using An Improved Sliding Mode Observer With Sigmoid Function", ECTI Transactions on Electrical Engineering, Vol.5, No.1, pp.51-55, February 2007
[18] Kun Ji and Won-jong Kim, "Real-Time Control of Networked Control Systems via Ethernet", International Journal of Control, Automation, and Systems, Vol.3, No.4, pp.561-600, December 2005
[19] Jul-Ki Seok, Jong-Kun Lee and Dong-Choon Lee, "Sensor less Speed Control of No salient Permanent-Magnet Synchronous Motor Using Rotor-Position-Tracking PI Controller", IEEE Transactions on Industrial Electronics, Vol.53, No.3, pp.399-405, April 2006
[20] Anthony Spiteri Staines, "Modeling and Analysis of a Cruise Control System", World Academy of Science, Engineering and Technology, Vol.38, pp.173-177, 2008.
[24] M.S. Merzoug and H. Benalla, "Nonlinear Back stepping Control of Permanent Magnet Synchronous Motor (PMSM)", International Journal of Systems Control, Vol.1, No.1, pp.30-34, 2010
[25] Jinpeng Yu, Junwei Gao, Yumei Ma and Haisheng Yu, "Adaptive Fuzzy Tracking Control for a Permanent Magnet Synchronous Motor via Backstepping Approach", Mathematical Problems in Engineering, Vol.2010, pp.1-13, 2009
[26] Ximena CeliaMendez Cubillos and Luiz Carlos Gadelha de Souza, "Using of H-Infinity Control Method in Attitude Control System of Rigid-Flexible Satellite", Mathematical Problems in Engineering, Vol.2009, pp.1-9, 2009
Acknowledgement
I am highly thankful to Hon’ble chairman S V E Society Er.Shri Eshwar Khandre & beloved Principal Dr. B.B. Lal & my family members for their encouragement & support.
1. T.S.Viswanath presently working as Asst.Prof in IT Dept REC, Bhalki his area interest includes Robust control signal processing.