2016 International Conference on Electronic Information Technology and Intellectualization (ICEITI 2016) ISBN: 978-1-60595-364-9
Mill Load Control System Based on the
Improved Ant Colony Neural Network
Jianxin Zhou and Yilan Yao
ABSTRACT
Taking into account the complexity, nonlinearity and uncertainty of mill load control system, an improved ant colony neural network control strategy was proposed, based on the combination between dynamic local pheromone update and global pheromone update with an adaptive control pheromone. This improved algorithm was used to tune PID parameters and to control mill load. The results from simulation test indicated that many assumptions about the controlled object characteristics in mill load system were effectively avoided via the improved ant colony neural network PID approach. Meanwhile, the complicated nonlinear equations were also simplified. Consequently, the mill load system can be controlled quickly and accurately with a satisfactory accuracy and dynamic performance.
INTRODUCTION
Mill load is acknowledged as one of the critical parameters during the operation of crushing equipment. It is very important to maintain the relative stability of mill load for improving product quality and enhancing grinding efficiency. Hence, it is extremely necessary to perform further researches about mill load control system in ore grinding process. However, it is very difficult for traditional model-based control strategy such as PID control system to achieve perfect control effect due to the complexity, nonlinear and uncertainty during the grinding process.
__________________________
Artificial neural network can approximate nonlinear continuous function with arbitrary precision and avoid the complex behavior for the solved problem in the modeling process. In addition, neural network model has a good adaptability, learning ability and strong anti-interference ability. Therefore, the neural network has been widely concerned in the control field. To the best of our knowledge, most of the neural networks are trained using gradient descent algorithm such back propagation algorithm (BP) with a longer convergence time and more probability to fall into local optimum. However, ant colony algorithm, as a global optimization-based heuristic algorithm, is used to train the neural network weights and the domain value, thus avoid the defects from BP algorithm. In this study, an improved ant colony algorithm was introduced to optimize neural network weights. Mill load system was controlled via the optimized neural network. Consequently, the problem of falling into local optimum effectively avoided and satisfactory control effect was achieved.
MILL LOAD CHARACTERISTICS
Nonlinear and large-time-delay in mill operation caused a continuous drift of the optimal value of mill load. The nonlinear curves between mill load value and mill sound, between power and output were shown in Figure 1. As seen from Figure 1, the grinding sound declined sharply with the increasing mill load in I zone while the power and output increased significantly, and the power reached an extreme value. When mill load continued to increase and entered into the II zone of load characteristics, grinding sound and the power continued to decline and grinding sound tended to be stable value, meanwhile, the output ascended to reach maximum value. Entering into the III zone, the power further declined and the output was sharply down with the increase of mill load, however, grinding kept constant basically. From the mentioned above, the mill was in under-grinding state in I zone, in which mill sound was clearly and reactive power consumption was serious. Therefore, it was necessary to increase the mill load amount. Entering into the III zone, although mill load was very large but the power and output still kept a downward trend, which indicated that the mill was in full-grinding state with a low efficiency and high energy consumption. Apparently, the grinding became more and more boring under this condition. Therefore, the II zone was considered as the optimal area of mill operation characteristic. Usually, the mill load was controlled manually depending on experience in traditional production process so that the mill load was not controlled accurately and promptly. Consequently, the production efficiency of mill was reduced enormously [1].
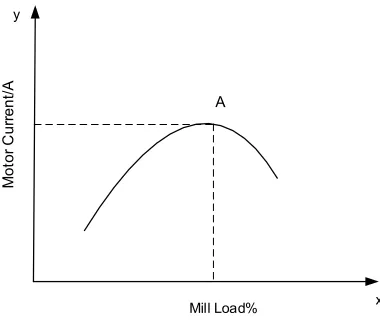
was increased under normal working conditions of the mill. Otherwise, if the supplying rate was reduced, the mill load would be also reduced, thus the electric current of motor was correspondingly reduced. Therefore, the supplying rate of the feeder was adjusted through the detection of mill motor current to realize automatic control of the mill load.
x y
Mill Load%
P/
kw
;F
(t
/h
);
S/
dB
Sound(S)
Power(P)
Output(F)
[image:3.612.204.394.191.350.2]I II III
Figure 1. Curve of mill operating characteristic.
x y
Mill Load%
Mo
to
r
C
u
rr
e
n
t/
A
A
[image:3.612.203.393.415.577.2]NEURAL NETWORK TRAINING BASED ON IMPROVED ANT COLONY ALGORITHM
The most of neural networks were trained using gradient descent algorithm such back propagation algorithm (BP) with a longer convergence time and more probability to fall into local optimum. However, ant colony algorithm, as a global optimization-based heuristic algorithm, was used to train the neural network weights and the domain value, thus avoid the defects from BP algorithm. Neural network training was usually considered as an optimization problem, that is to say, a set of optimal real weight combination was searched to minimize the error between output and expected values under these weight. That there were m parameters including all
the weights and thresholds in the network was supposed. Firstly, the neural network parameter pi(1 i m) was set to N random nonzero values to form the
assemblage Ipi . The ant colony searches for food starting from nest, that is to say,
only a weight value was chosen from the collection for each ant. A set of neural network weights was selected from all collections. The number of ants was recorded as h. j( )Ipi was defined as the pheromone of p Ij( )pi in the collection IPi . It was
mutually independent for different ants to select elements in the search process. According to the pheromone and state transition probability of each element in the collection, only one element was selected from each collection, starting from the set
i P
I
. The ant will arrive at food source after completing element selection in all collections, and then pheromone of elements in the set is regulated. This process was repeated until the evolutionary trend was not clear or the given iterations were completed [2].
In the basic ant colony algorithm, subinterval with the largest information amount in the next node was selected according to the probability of p . Furthermore, the path with the maximum information amount was usually selected, which makes the component value of new generation solution centralizing on this path and leads to its stagnation. To avoid this situation, it was necessary for ant to continuously update the local pheromone on pass-through path in the search process. This reduces the probability that the next ant choose the same path. In this study, the adaptive pheromone with a global updating mode was adopted and slightly modified to update the local pheromone [3]. The residual pheromone on the path was weakened according to the following formula (1).
( , ) (1i j ) ( , )i j ( )x
(1)
paths, it was necessary to properly suppress the positive feedback in the ant colony algorithm by addition of a small amount of negative feedback information. This strategy can reduce the difference between the local optimal and worst solutions of pheromones on their corresponding path, and thus expand the search scope of this algorithm. During the middle of the search process, ( ) t was appropriately increased to ensure the search speed. At the later stage of search process, ( ) t continue to be increased for the fast convergence of algorithm because the path was basically determined.
1
2
3
0.0001, [1, ] 5
, ( , ) 5 3
4
( ) , ( , )
3 5 4 , ( , )
5
N x
N N y x
N N
x y x
N
y x N
(2)
Where, x and N were the current iterations and total iterations, respectively.
The pheromones on these paths were globally updated after all the ants have completed a cycle. In the basic ant colony algorithm, only these pheromones on the best path were enhanced which easily lead to a local optimal solution.
In this paper, the method from the literature [4] was applied to ant colony neural network in the global update in order to make the searching space of algorithm as large as possible and find the interval generating optimal solutions. This algorithm can be converged in a shorter time to obtain global optimal solution. In this algorithm, the volatile coefficient of pheromone can be adjusted adaptively according to the search results of ants in each cycle.
That ant takes three time units from the start node to the end node was supposed. The pheromones on each side at the t and tm moment are ij( )t and ij(tm),
respectively. The error value from the n ants at tm moment was (e tn m). The
minimum error value obtained by the algorithm was defined as min ( )e t until the t
moment.
Based on the above assumptions, the dynamic adjustments of pheromone ( )
ij t m
on each side at tm moment can be divided into the following two kinds
of situations. If (e tn m) was less than min ( )e t , the searched path from the n ant
pheromone intensity on this path should be strengthened by increasing the residual pheromone on this path appropriately. If (e tn m) was more than min ( )e t , the
searched path from the n ant at tm moment was worse than the previous optimal
solution. Therefore, the pheromone intensity on this path should be weakened by decreasing the residual pheromone on this path appropriately. Specification can be achieved by the following formula (3).
1 ( ) (1 ) ( )
ij ij
n
t m t
e
(3)
Where, if e tn( m) min ( ) e t and 1 10 was established, pheromone
would be in an increasing trend. Conversely, pheromone was in an decreasing trend with (e tn m) min ( ) e t and 0 1.
In order to prevent premature convergence, pheromone concentration in this algorithm was constrained referencing to the restriction method from MMAS and
min max
[ , ]
was stipulated [5].
The improved ant colony algorithm to optimize the neural network was as follows.
(1) Initialization. Time and cycle index were set to zero. The information amount for each element was set as j( )Ipi C. The maximal cycle index Ncmax
was also set. Meanwhile, all the ants were placed in the nest.
(2) All ants are started. Aimed at the assemblage of Ipi , the state transition
probability can be calculated by ant k (k 1, 2, , ) h according to the following
formula (4).
0
arg max{ }ij q q j
S otherwise
(4)
Where, q0(0,1) was constant while q was a random number. If q was more
than q0, the next node can be selected the following formula (5).
1
( ) Pr( ( ))
( )
i i
i k j p k
j p N
g p g
I I
I
(5)(4) The second and third steps were repeated until all the ant colonies arrived to the food source.
(5) t t m and Nc Nc1 were set. The output value and error of the
neural network were calculated using the weights of each ant, and the current optimal solution was recorded.
Starting from the nest, ants arrived to food source after m time units. The
information amount on each path was updated globally referencing formula (3). Supposing that there were p learning sample vectors, the output error of neural network weights was set by a set of weights selected from the n ants as shown in
formula (6).
2
1 1
1
( )
2
P N
p p
n l l
p l
e O y
(6)Where, Olp and p l
y were the actual and expected output of the l sample
corresponding to the p training modes, respectively. Obviously, the smaller error
n
e was, the greater the increment of the corresponding information amount was.
(6) If all the colonies converges to the same path or the cycle index exceeded the maximum, the cycle will be terminated, and the calculated results will be output. Otherwise, it was jumped to the second step.
PID PARAMETER TUNING BASED ON IMPROVED ANT COLONY NEURAL NETWORK
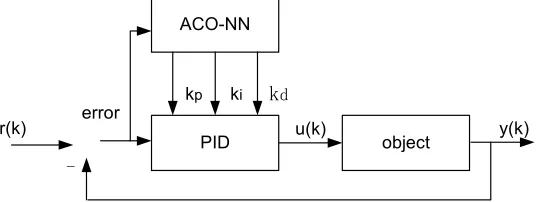
The PID control system structure of neural network was shown in Figure 3. The controller was composed of the following two parts. The first part was the classical PID controller, which can control the controlled object process with a closed-loop. Three parameters (kp、ki、kd) were adjusted online in this controller.
Another part was the ant colony optimization neutral network (ACO-NN), which can adjust parameters of PID controller according to the running state of system to achieve the optimization of some performance indexes. The output state of output layer neuron corresponded to three adjustable parameters (kp, ki and kd) of the PID
controller. These parameters can be in an optimal stable-state through their own learning and weighted coefficient adjustment. The performance index function was taken as the following formula (7).
2
1
( ) ( ( ) ( ))
2
PID control algorithm based on ant colony neural network can be summarized as follows.
(1) Determination of the structure of neural network. Specifically speaking, the nodes number (M) of input layer and the nodes number ( Q ) of hidden layer were determined. The initial values of weighted coefficients for each layer were given. In addition, the ant colony algorithm was initialized.
(2) ( )r k and ( )y k were obtained by sampling. This variable ( )e k was calculated
PID ACO-NN
object
r(k) error
kd
ki
kp
[image:8.612.167.437.223.324.2]
-u(k) y(k)
Figure 3. Control system structure of PID based on ACO neural net.
(3) The input and output of each neuron in the neural network were calculated. The output in the output layer was the three adjustable parameters of PID controller. They were kp, ki and kd, respectively.
(4) The outputs of PID controller were calculated. Meanwhile, they will participate in the control and calculation of control system to obtain output value
( )
yout k , and thus the error can be obtained.
(5) In order to realize the adaptive adjustment of PID control parameters, the neural network learning and the adjustment of weighted coefficient were carried out via the ant colony optimization algorithm.
(6) Referencing to the new weights, the calculation and adjustment of this network were stopped if the maximum learning numbers are reached. Otherwise, they will continue to be carried out.
SIMULATION TEST
In the simulation test of mill load control, the neural network structure was 4-5-3 which suggested that there were four network input nodes. In order to fully reflect parameter variation characteristics of the PID, the four input nodes were selected as
1
x , x2,x3 and 1 corresponding to ( )e k , ( )e k e k( 1), ( ) 2 (e k e k 1) e k( 2)
corresponded to the three adjustable parameters (kp, ki and kd) of PID. The
non-negative Sigmoid function was selected as the output layer neuron activation function since kp, ki, kd were non-negative. The scale and iterations of ant colony
were m30 and N Ncmax 2000, respectively. The parameters were y1 0.0005
, y2 0.001, y3 0.002, 0.7, 0.7. The weight and threshold values were
[image:9.612.190.406.213.387.2]randomly selected from the interval of [-2, 2].
Figure 4. Comparison of training error of the two networks.
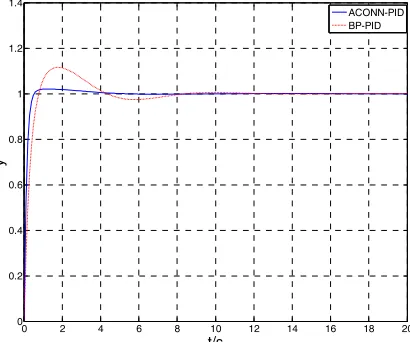
Figure 5. Control effect of BP neural network and improved ant colony neural network.
As seen from Figure 4, the convergence rate of the improved ant colony neural network was faster than that of BP neural network, and the model accuracy was higher than that of BP neural network after 2000 trainings.
0 500 1000 1500 2000 2500 0
0.005 0.01 0.015 0.02 0.025 0.03 0.035 0.04 0.045 0.05
2000 Epochs
err
or
error of ACONN error of BP
0 2 4 6 8 10 12 14 16 18 20 0
0.2 0.4 0.6 0.8 1 1.2 1.4
t/s
y
[image:9.612.194.399.427.598.2]The Figure 5 showed that the overshoot of PID control system based on ant colony neural network was obviously small with a same time increment under the given step signal, and the regulating time was also significantly less than that of PID control system with the BP neural network optimization. Therefore, the designed controller can guarantee the stability and satisfactory dynamic characteristics of system due to the fast response and small overshoot.
CONCLUSIONS
It was difficult to establish an accurate mathematical model of the mill load control system due to the complexity, nonlinearity and uncertainty. Taking into account this situation, an improved ant colony neural network control algorithm with a quick convergence rate was proposed. Particles were not easy to fall into the local minimum using this algorithm. In addition, PID parameters can be adjusted online showing excellent performance. Finally, this algorithm was also verified by simulation test. The results indicated that the neural network trained by the improved ant colony algorithm has faster convergence speed and better generalization ability than the BP algorithm, and satisfactory effects have been achieved in the mill load control system.
ACKNOWLEDGEMENTS
This work is supported by key project in Hebei Province Department of Education, (No. ZD2015059).
REFERENCES
1. Dorigo, M., M. Maniezzo, and V. Colomi, A. 1996. “The ant system: optimization by a colony of cooperating agents,” Man and Cybernetics, Part B., 26: 29-41.
2. Hong, B.R., F.H. Jin, and Q.J. Gao, 2003. “Multi-layer feedforward neural network based on ant colony system,” Journal of Harbin Institute of Technology, 35: 823-825 (In Chinese).
3. Qin, G.L. and J.B. Yang. March 2002. “An Improved Ant Colony Algorithm,” Information and Control,” 31: 198-201 (In Chinese).
4. Zhang, Z.M. and X.J. Zhang. 2006. “Ant Colony Algorithm with Strategy of Award and Penalty,” Computer simulation, 32: 161-163 (In Chinese).