International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, ISO 9001:2008 Certified Journal, Volume 3, Issue 6, June 2013)
324
Comparison between Various Edge Detection Methods on
Satellite Image
H.S. Bhadauria
1, Annapurna Singh
2, Anuj Kumar
3Govind Ballabh Pant Engineering College ( Pauri garhwal),Computer Science and Engineering Department, Uttarakhand Technical University
Abstract-- In this paper the comparative analysis of different edge detection algorithms is presented. The edge is the basic characteristic of image. Inan image, an edge is a curve that follows a path of rapid change in image intensity. Edges are often associated with the boundaries of objects in a scene. Edge detection is used to identify the edges in an image and significantly reduces the amount of data and filter out useless information, while preserving the important structural features in an image. This research paper presents a brief study of the fundamental concepts of the edge detection operation, theories behind different edge detectors and compares different image edge detection algorithms including Roberts, Sobel, Prewitt, and Canny with MATLAB tool.
Keywords-- Edge Detection, Sobel, Prewitt, Roberts, Canny.
I. INTRODUCTION
The main purpose of edge detection is to simplify the image data in order to minimize the amount of data to be processed [1]. Generally, an edge is defined as the boundary pixels that connect two separate regions with changing image amplitude attributes such as different constant luminance values in an image [2]. The detection operation begins with the examination of the local discontinuity at each pixel element in an image. There are an extremely large number of edge detection operators available, each designed to be sensitive to certain types of edges. Variables involved in the selection of an edge detection operator include edge orientation, noise environment and edge structure. The geometry of the operator determines a characteristic direction in which it is most sensitive to edges. Based on these characteristics, the detector has to decide whether each of the examined pixels is an edge or not.
Edge detection operator is a mutation in the nature of the image edge to test the edge. There are two main types: one is the first derivative-based edge detection operator to detect image edges by computing the image gradient values, such as Roberts operator, Sobel operator, Prewitt operator; the other one is the second derivative-based edge detection operator, by seeking in the second derivative zero-crossing to edge detection, such as LOG operator, Canny operator [3-4].
There are many methods for edge detection, but most of them can be grouped into two categories, search-based and zero-crossing based.
The search-based methods detect edges by first computing a measure of edge strength, usually a first-order derivative expression such as the gradient magnitude, and then searching for local directional maxima of the gradient magnitude using a computed estimate of the local orientation of the edge, usually the gradient direction. The zero-crossing based methods search for zero crossings in a second-order derivative expression computed from the image in order to find edges, usually the zero-crossings of the Laplacian or the zero-crosssings of a non-linear differential expression. As a pre-processing step to edge detection, a smoothing stage, typically Gaussian smoothing, is almost always applied. John canny considered the mathematical problem of deriving an optimal smoothing given the criteria of detection, localization, and minimizing multiple responses to a single edge. Canny [5] shows that the optimal filter given by these assumptions is a sum of four exponential terms. The Canny edge detector (including its variations) is still a state-of-the-art edge detector [6]. Unless the preconditions are particularly suitable, it is hard to find an edge detector that performs significantly better than the Canny edge detector. In [7] the Canny-Deriche detector was derived from similar mathematical criteria as the Canny edge detector, although starting from a discrete viewpoint and then leading to a set of recursive filters for image smoothing instead of exponential filters or Gaussian filters.
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, ISO 9001:2008 Certified Journal, Volume 3, Issue 6, June 2013) On a discrete grid, the non-maximum suppression
stage can be implemented by estimating the gradient direction using first-order derivatives, then rounding off the gradient direction to multiples of 45 degrees, and finally comparing the values of the gradient magnitude in the estimated gradient direction.
II. EDGE DETECTION METHODS
Edge detection is the process of finding sharp contrasts in intensities in an image. This process significantly reduces the amount of data in the image, while preserving the most important structural features of that image. An edge detection algorithm extracts the main properties from an image which are the building edges for the current study.
There are many ways to perform edge detection [1]. However, the majority of different methods may be grouped into two categories: one is the first derivative-based edge detection operator to detect image edges by computing the image gradient values, such as Roberts operator, Sobel operator, Prewitt operator; the other one is the second derivative-based edge detection operator, by seeking in the second derivative zero-crossing to edge detection, such as LOG operator, Canny operator.
Gradient is a measure of the function changes and it is also the first order derivative of the image corresponds to two-dimensional function. An image can be seen as a continuous derivative of image intensity of sampling points group. Gradient[8] is a type of two-dimensional equivalent of the first derivative. So it can be defined as a vector.
(1)
There are two important properties. First, the vector G (x, y) direction is same as the direction of the maximum rate of change of increasing function f (x, y) Second, the gradient amplitude
(2)
When the gradient is calculated, the same location (x, y) of real partial derivatives is essential in computing space. Gradient approximation is not in the same location using the above formula. So the 2x2 first order differential template is used to calculate partial derivatives in x and y direction of the interpolation points [x +1 / 2, y +1 / 2], then Gx and Gy can be expressed as:
(3)
(4)
2.1 Sobel operator
The operator consists of a pair of 3×3 convolution kernels as shown in Figure 1. One kernel is simply the other rotated by 90°. The kernels can be applied separately to the input image, to produce separate measurements of the gradient component in each orientation (Gx and Gy). These can then be combined together to find the absolute magnitude of the gradient at each point and the orientation of that gradient.
-1 0 1
-2 0 2
-1 0 1
1 2 1
0 0 0
[image:2.595.345.522.618.695.2]-2 -1 -1
Figure 1 Masks used by Sobel Operator
The gradient magnitude is given as:
(5)
Typically, an approximate magnitude is computed using
(6)
The angle of orientation of the edge giving rise to the spatial gradient is given by
(7)
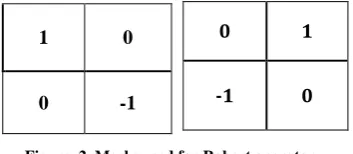
2.2 Robert’s operator
The Roberts Cross operator performs a simple, 2-D spatial gradient measurement on an image. Pixel values at each point in the output represent the estimated absolute magnitude of the spatial gradient of the input image at that point. The operator consists of a pair of 2×2 convolution kernels as shown in Figure 2. One kernel is simply the other rotated by 90°. This is very similar to the Sobel operator.
1 0
0 -1
0 1
-1 0
Figure 2. Masks used for Robert operator.
The kernels can be applied separately to the input image, to produce separate measurements of the gradient component in each orientation (Gx and Gy). The gradient magnitude is given as
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, ISO 9001:2008 Certified Journal, Volume 3, Issue 6, June 2013) Typically, an approximate magnitude is computed
using
(9)
Which is much faster to compute. The angle of orientation of the edge giving rise to the spatial gradient is given by:
(10)
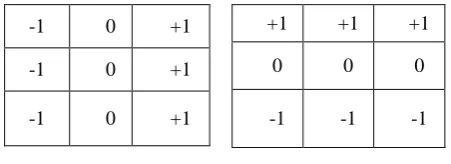
2.3 Prewitt’s operator
Prewitt operator [11] is similar to the Sobel operator and is used for detecting vertical and horizontal edges in images.
-1 0 +1
-1 0 +1
-1 0 +1
+1 +1 +1
0 0 0
-1 -1 -1
Figure 3. Masks for the Prewitt gradient edge detector
2.4 Laplacian of Gaussian
The Laplacian is a 2-D isotropic measure of the 2nd spatial derivative of an image. The Laplacian of an image highlights regions of rapid intensity change and is therefore often used for edge detection. The Laplacian is often applied to an image that has first been smoothed with something approximating a Gaussian Smoothing filter in order to reduce its sensitivity to noise. The operator normally takes a single gray level image as input and produces another gray level image as output.
The Laplacian L(x, y) of an image with pixel intensity values I(x, y) is given by
(11)
Since the input image is represented as a set of discrete pixels, we have to find a discrete convolution kernel that can approximate the second derivatives in the definition of the Laplacian.
1 1 1 -1 2 -1
1 -8 1 2 -4 2
[image:3.595.53.279.312.394.2]1 1 1 -1 2 -1
Figure 4 Three commonly used discrete approximations to the Laplacian filter.
2.5 Canny Edge Detection method
Canny operator [8] is based on three criteria. The basic idea uses a Gaussian function to smooth image firstly. Then the maximum value of first derivative also corresponds to the minimum of the first derivative. In other words, both points with dramatic change of gray-scale (strong edge) and points with slight change of grayscale (weak edges) correspond to the second derivative zero-crossing point. Thus these two thresholds are used to detect strong edges and weak edges. The fact that Canny algorithm is not susceptible to noise interference enables its ability to detect true weak edges.
Canny defined optimal edge finding as a set of criteria that maximize the probability of detecting true edges while minimizing the probability of false edges. To smooth the image, the Canny edge detector uses Gaussian convolution, is the spread of the Gaussian and controls the degree of smoothing.
(12)
(13)
The gradient magnitude and direction at each pixel are calculated in this step (Figure 5). Note that the maxima and minima of the first derivative gradient are the same as the zero crossings of the second directional derivative.
(14)
Only the maxima crossings are of interest because these pixels represent the areas of the sharpest intensity changes in the image. These zero-crossings are the ridge pixels that represent the set of possible edges. All other pixels are considered non-ridge and subsequently suppressed. Finally, a two-threshold technique or hysteresis is performed along the ridge pixels to determine the final set of edges.
-1 0 1 1 2 1
-2 0 2 0 0 0
[image:3.595.310.554.583.673.2]-1 0 1 -1 -2 -1
Figure 5. Kernels
[image:3.595.42.288.650.726.2]International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, ISO 9001:2008 Certified Journal, Volume 3, Issue 6, June 2013) This step uses two thresholds, t1, t2 where t1 > t2, to
partition the ridge pixels into edges/non-edges. Pixels with gradient magnitudes above t1 are classified as definite edges. Pixels between t2 and t1 are classified as potential edges. Pixels under t2 are classified as non-edges. Next, all potential edges that can be traced back to a definite edge via adjacent potential edges are also marked as definite edges. The process solves some of the issues associated with edge streaking and discontinuity in the results achieved by simple detectors by identifying strong edges while accounting for comparatively weaker ones.
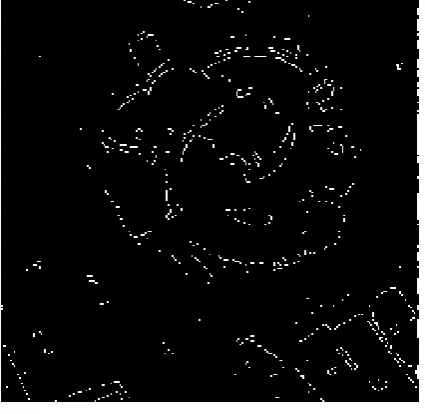
III. RESULTS AND DISCUSSION
[image:4.595.327.535.124.322.2]In this paper various edge detection methods namely Sobel, Roberts, Prewitt and Canny are applied on a satellite image as shown in figure 6 and results of these methods are shown in figure 7-10 respectively.
Figure 6 Original image
[image:4.595.67.267.334.765.2]
Figure 7 Sobel Edge Detected Image
[image:4.595.72.258.343.529.2]Figure 8 Roberts Edge Detected Image
[image:4.595.326.539.351.558.2] [image:4.595.333.530.572.770.2]International Journal of Emerging Technology and Advanced Engineering
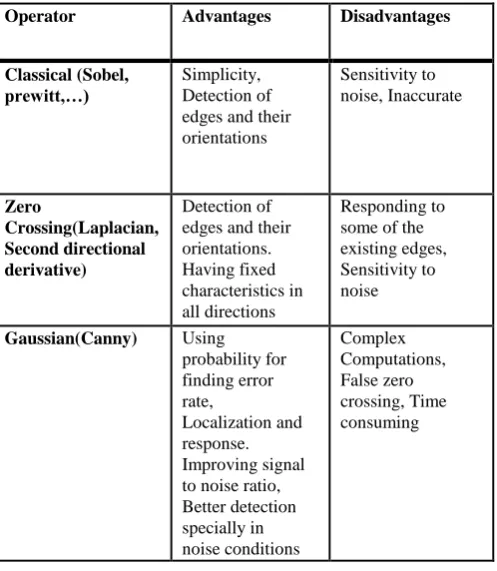
Website: www.ijetae.com (ISSN 2250-2459, ISO 9001:2008 Certified Journal, Volume 3, Issue 6, June 2013) This paper presents some advantages and
[image:5.595.42.291.187.473.2]disadvantages of aforesaid edge detection techniques in Table 1.
Table 1
Advantages and Disadvantages of Edge Detectors
Operator Advantages Disadvantages
Classical (Sobel, prewitt,…)
Simplicity, Detection of edges and their orientations
Sensitivity to noise, Inaccurate
Zero
Crossing(Laplacian, Second directional derivative)
Detection of edges and their orientations. Having fixed characteristics in all directions
Responding to some of the existing edges, Sensitivity to noise
Gaussian(Canny) Using probability for finding error rate,
Localization and response. Improving signal to noise ratio, Better detection specially in noise conditions
Complex Computations, False zero crossing, Time consuming
IV. CONCLUSIONS
This paper presents the most commonly used edge detection techniques of Gradient-based and Laplacian based Edge Detection. The software is developed using MATLAB 7.8.0 (R2009a). Gradient-based algorithms such as the Prewitt filter have a major drawback of being very sensitive to noise. The size of the kernel filter and coefficients are fixed and cannot be adapted to a given image.
Canny operator is based on three criteria. The basic idea uses a Gaussian function to smooth image firstly.
Then the maximum value of first derivative also corresponds to the minimum of the first derivative. In other words, both points with dramatic change of gray-scale (strong edge) and points with slight change of grayscale correspond to the second derivative zero-crossing point. Thus these two thresholds are used to detect strong edges and weak edges. The fact that Canny algorithm is not susceptible to noise interference enables its ability to detect true weak edges. Canny algorithm is not susceptible to noise interference enables its ability to detect true weak edges. It’s optimal edge detection algorithm.
REFERENCES
[1] D. Marr and E. Hildreth, Theory of Edge Detection (London, 1980).
[2] J. Canny, “A computational approach to edge detection,” IEEE Trans. Pattern Analysis and Machine Intelligence, Vol. 8, No. 6, pp. 679-698, 1986.
[3] R. C. Gonzalez and R. E. Woods, Digital Image Processing. Upper Saddle River, NJ: Prentice-Hall, pp. 572-585, 2001. [4] W. K. Pratt, Digital Image Processing. New York, NY:
WileyInterscience, pp. 491-556, 1991.
[5] J. Canny “A computational approach to edge detection”, IEEE Trans. Pattern Analysis and Machine Intelligence, vol 8, pages 679-714, 1986.
[6] Shapiro L.G. & Stockman G.C. Computer Vision. London etc.: Prentice Hall, pp. 326, 2001,.
[7] R. Deriche, “Using Canny's criteria to derive an optimal edge detector recursively implemented”, Int. J. Computer Vision, vol 1, pp. 167–187, 1987).
[8] Canny John, A Computational Approach to Edge Detection, IEEE Transactions on Pattern Analysis and Machine Intelligence, PAMI-8(6), pp. 679-698, 1986.
[9] R. A. Kirsch. “Computer determination of the constituent structure of biomedical images”. Comput. Eiorned. Res., vol. 4, pp. 315-328, 1971.
[10] T. Peli and D. Malah. “A Study of Edge Detection Algorithms”. Computer Graphics and Image Processing vol. 20, pp. 1-21, 1982.