Rochester Institute of Technology
RIT Scholar Works
Theses
Thesis/Dissertation Collections
2003
Filter Selection for Spectral Estimation Using a
Trichrmatic Camera
David C. Day
Follow this and additional works at:
http://scholarworks.rit.edu/theses
Recommended Citation
Filter
Selection for Spectral Estimation
Using
aTrichromatic
Camera
David Collin
Day
B.S.
Imaging
ScienceFilter Selection for Spectral Estimation Using a Trichromatic Camera
By
David Collin Day
B.S. Imaging Science
Rochester Institute of Technology (200
I)
A thesis submitted
in partial fulfillment of the requirements of
for the degree of Master of Science
in the
Chester F. Carlson Center for Imaging Science of the
College of Science
Rochester Institute of Technology
October 2003
Signature of Author. _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
_
Accepted
by _ _ _ _ _ _
--:--_---=-_ _ _
----L-/_
tJ
_----=-'l'---_O-=-.3_
CHESTER F. CARLSON
CENTER FOR IMAGING SCIENCE
COLLEGE OF SCIENCE
ROCHESTER INSTITUTE OF TECHNOLOGY
ROCHESTER, NEW YORK
CERTIFICATE OF APPROVAL
M.S. DEGREE THESIS
The M.S. Degree Thesis of David Collin Day has been
examined and approved by the thesis committee as satisfactory
for the thesis requirement for the Master of Science degree
Dr. Roy S. Berns, Thesis Advisor
Dr. Francisco H. Imai
Dr. Mark D. Fairchild
THESIS RELEASE PERMISSION
ROCHESTER INSTITUTE OF TECHNOLOGY
COLLEGE OF SCIENCE
CHESTER F. CARLSON
CENTER FOR IMAGING SCIENCE
Filter Selection for Spectral Estimation Using a Trichromatic Camera
I, David Collin Day, hereby grant
permission to the Wallace Memorial Library of R.I.T.
to reproduce my thesis in whole or in part. Any reproduction will not be for commercial
use or profit.
Signature: _ _ _ _ _ _ _ _ _ _ _ _ _
_
Date:
/0/7
!tJ3
---./f----II'---=---FilterSelection for Spectral Estimation
Using
aTrichromatic CameraBy
DavidCollin
Day
Athesissubmittedinpartialfulfillmentoftherequirements of forthedegreeofMasterofScienceinthe
Chester F. Carlson Center for
Imaging
Scienceofthe CollegeofScienceRochesterInstituteof
Technology
Abstract:
Current
imaging
practices arebasedonexploitingmetamerismtorecord and reproduceimages. Asaresult, thedataobtainedintheseimagesaredependentontheviewing conditions andtheobserver. Whilethesemethods produce acceptable results for
day
today
use,they
oftendonot exhibitthe typeofaccuracyand control requiredforscientific purposes such as art conservation. Asasolution, manyresearchinstitutionsare now advocatingtheuseof multispectralimaging
torecordtheobjects fundamentalspectral propertiestoremovethedata'sdependency
ontheobserver andviewingenvironment.Theresearchdescribedinthis thesisinvolved
determining
ifatrichromaticcamera andreadilyavailablefilterscanbeusedforspectral estimation purposes. The Pixel Physics TerraPixcamera system wascharacterized,itsresponsetoatargetand 105Kodak
WrattenFiltersundertungstenilluminationwassimulated,and spectral reflectance estimations were generated. The
top
filtercandidates were chosenbasedontheir simulated performance. These filterswerethenusedinanimaging
experimentdesignedtoapproximateconditionsthatwouldbe found inan artgalleryor other place wherecopy workisperformed. Theresults ofthe
imaging
experiment werecomparedwiththe simulation,and shortcomings ofthemodel wereidentified. Theresults oftheexperiment showthata camera model canbeused as aguidingtool tomakefilterselectionsforAcknowledgements:
Specialthanksgoto the
following
individuals:Dr.
Roy
S.Berns,
for givingmetheopportunitytowork onthisproject, makingitpossible formetosee various works of artina mannerthatmost peopledonot
knowexist,and
helping
meimproveas anindividual.Dr. Francisco H.
Imai,
who gave mehelp
andpointers,butmoreimportantly
made melookateverything inadifferentmanner,helpedmerealizethat things
are notasbadas
they
seem,andfor simplybeing
anincredibly
supportivefriendthroughout thisentire process.
Dr. Mark D.
Fairchild,
for hisadviceandrecommendations,andhelping
me outinabind.
Lawrence
Taplin,
forspendingtimeanswering my questions,helping
meimprovemy writingandresearchtechniques,and
listening
tomyproblems and concerns.Allthepeople attheMunsellColor Science
Laboratory,
whohaveat one point oranother given me ahand.
My
sponsors,theMellonFoundation,
theNationalGallery
ofArt,
WashingtonD.C.,
theMuseumofModernArt,
New YorkCity,
andPixel Physicsfortheir generousfunding
and use of equipment which madethis thesispossible.My
parents,forbeing
therewhenIneededthemmost.Taryn,
forallherpatience,support andmakingmefeel likesomeone whenIfelt likeIwasnothing.Table
ofContents:
TableofContents: vii
ListofFigures: ix
ListofTables: xiv
MunsellColor Science
Laboratory
Spectral Notation: xvChapter 1 - Introduction
andOverview: 1-1
Introduction: 1-1
Overview: 1-6
Chapter 2- Spectral
Imaging
Systems Background: 2-1Narrowbandcapture: 2-1
Widebandcapture: 2-2
Trichromaticcamera with absorptionfilters: 2-3
Conclusions: 2-4
Chapter 3- Equipment: 3-1
Purpose: 3-1
Pixel Physics TerraPixcamera system: 3-1
Elinchrome ScanliteDigital 1000: 3-2
Targets: 3-3
Filters: 3-6
Processing: 3-7
Chapter4- Filter Selectionfor Spectral
Estimation usingaNoiselessCameraModel:.4-1
Purpose: 4-1
FilterSelectionMethod: 4-1
SpectralReconstruction Theory: 4-2
Experimental: 4-4
ResultsandDiscussion: 4-9
Conclusions: 4-22
Chapter5
-Modeling
theCamera Noise for Simulation: 5-1Purpose: 5-1
Noise Sources: 5-2
Experimental: 5-3
ModelResults: 5-13
Conclusions: 5-17
Chapter6- Filter Selectionfor SpectralEstimation
Incorporating
aNoiseModel: 6-1Purpose: 6-1
Theory
ofSpectralReconstruction usingadirectpseudo-inversetransformation: 6-1Experimental: 6-2
ResultsandDiscussion: 6-3
Conclusions: 6-29
Chapter 7
-Imaging
andData Comparison: 7-1Purpose: 7-1
Imaging: 7-1
Data ComparisonandErrorSource Analysis: 7-7
Model limitations: 7-7
Equipment Limitations: 7-17
Conclusions: 7-18
Chapter 8- Filter
Combination Analysis 8-1
Purpose: 8-1
Spectralestimation and performance evaluation: 8-1
ResultsandDiscussion: 8-4
Wratten 55andNF combination 8-6
Wratten 60andNF filtercombination 8-19
Wratten 2CandNFcombination 8-29
Sensitivity
ofthepseudo-inversetransformationmatrix: 8-33Targetand
lighting
analysis: 8-36Conclusions: 8-39
Chapter 9- Conclusions
andFuture Research: 9-1
Conclusions: 9-1
Future ImprovementsandResearch: 9-5
Chapter 10- References: 10-1
A. Matlab Programs A-l
generatedc: Usedtogeneratethedigitalcountsbasedon equation3.6 A-l combinations_a.m
-usedtocalculatedata fora noiseless simulation A-2 simulate_noise_il2_pyth
-simulates pixels and noiseusingMatlab
imnoise()
function A-6 make_transforms_pyth.m-computestransforms fromsimulateddata A-l1 reflectance_estimates_from_noise_pyth.m
-creates reflectance estimatesfrom
simulatednoise A-13
pullDC_30.m
-takesdigitalcountsfrom
l/30th
secondimages A-16
pullDC.m
-pulldigitalcountsfromoptimizedimages A-l8
make_pixel_transforms.m
-calculatesthe transformsbasedon experimentaldataA-21 r_final_2.m
List
ofFigures:
Figure 1.1- General
processservingasthebasis forthisthesis 1-5 Figure 2.1- Quantix
camerawithLCTFattached 2-2
Figure 2.2-TheVASARIsystem(National
Gallery, London)
2-3 Figure 2.3-IBM Pro3000 scanningcamera 2-4
Figure3.1 - TerraPix
camerasystem 3-1
Figure3.2- TerraPix
unfilteredspectralsensitivities 3-2
Figure 3.3 - Scanlite
withlight diffuser 3-3
Figure 3.4- Elinchrome
relativespectralpowerdistribution 3-3
Figure 3.5
-Reflectance spectra of all samples onthe EsserandBluescharacterization
target
(top)
andtheGamblinpaintsampleverificationtarget(bottom)
3-5 Figure 3.6- Targetsimaged: Bluepigments(upper
left),
MacbethColorchecker(center),
Essertest target(upperright), KodakGray
Scale(left/center),
halon disk(right/center),
MacbethCCDC (lowerleft),
Gamblinpigments(lowerright)
3-6Figure 4.1 - Balzers UV/IRfilter
transmittance 4-7
Figure4.2- TerraPix
spectral sensitivities withUV/IRcutoff applied 4-8
Figure 4.3 - Histogram
oftheaverage percentRMSspectral error calculatedfromall
filtercombinations 4-9
Figure 4.4- HistogramoftheaverageCIEDE2000
calculatedfromallfilter
combinations 4-10
Figure 4.5- Average CIEDE2000
vs. average. RMSspectral error plot usedtoaidin
selectingthresholdsortingcriteria,withbluerepresentingtheentireset,green
representingthefirstsort,and redrepresentingthesecond sort 4-12
Figure4.6- MaximumCIEDE2000
vs. maximumRMSspectralerror plot usedin selectingthresholdsortingcriteria,withbluerepresentingtheentireset,green
representingthefirstsort,and redrepresentingthesecond 4-13
Figure4.7
-Flowchart outlininggeneral selectionprocessforthiscase 4-15 Figure 4.8- Wratten81
yellowishfilterspectraltransmittance 4-16
Figure4.9- Filteredand unfilteredTerraPixspectral sensitivities after
usingtheWratten
81 4-17
Figure 4.10- Transformation
matrixresultingfromtheWratten81 andunfiltered
combination. Notetheextremelylargescale 4-19 Figure 4.1 1 - SpectralTransmittanceoftheWratten40and80Afilters 4-20
Figure4.12- TerraPixCamera
sensitivitiesafterfiltrationwiththeWratten40and80A
filters 4-21
Figure 4.13 - Transformationmatrix coefficients
resultingfromtheWratten 40and80A
combination. The yscaleismuch smallerthanin figure
4.10,
suggesting lesssensitivity tonoise 4-22
Figure 5.1
-a,
b,
andc- TerraPixsignal variancerelationship determined from imagesof
the MacbethColorChecker DC foreach channel 5-6
Figure 5.2
-a,
b,
andc- Calculatedvs. measured averagedigitalcountverifyingthatthe
slopes areapproximatelyone andthatconstants are correct 5-9 Figure5.3
-a,
b,
and cFigure 5.4- Camera
modelflowchart outliningthepixel simulationprocess 5-13
Figure 5.5
-a,
b,
andc- Averagemeasureddigitalcountsvs. simulateddigitalcounts of
theCCDCafter
being
simulatedwiththemodelincluding
flatfielding
foreachchannel 5-15
Figure 5.6
-a,bandc
-Cumulative distributionplots ofthe measured(black
dashed)
andsimulated(coloredsolid)digitalcounts
(x),
verifyingthat thepixelsaredistributedwith anapproximateGaussian
density
5-17 Figure 6.1-Average % RMSspectral errorhistogramcalculatedusingthe
top
1,351 filtercombinationsfromthenoiseless case 6-3
Figure 6.2- Average CIEDE2000 histogram
calculatedwiththenoise model and
top
1,351 filtercombinationsfromthenoiselesscase 6-4Figure6.3 - Average % RMS
spectral error ofthenoise casevs.thenoiseless case plotted
tolook forcorrelations. Seetextforexplanationof colorcoding 6-5
Figure 6.4
-Average CIEDE2000 fromthenoisecase vs.thenoiseless case. Seetextfor
explanationof colorcoding 6-6
Figure 6.5
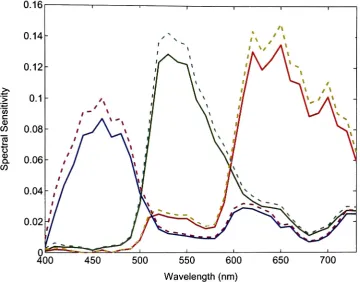
-Spectral TransmittanceoftheWratten55 6-1 1 Figure 6.6- Camera
sensitivitiesresulting fromtheuse oftheWratten55and unfiltered
combination. Thedashed linesrepresenttheresulting filteredsensitivities 6-12
Figure 6.7- Normalized
camera signal plotsresulting fromtheWratten 55 and unfiltered
combination. Thexaxis represents wavelength
(nm)
andyaxis representsnormalizedspectralsensitivity 6-13
Figure6.8
-Differenceplot of estimated spectrafrommeasured spectra oftheGamblin
verificationtargetresulting fromtheuse ofdatasimulated withtheWratten55and
unfiltered camera sensitivitiesinthenoiseless case 6-14
Figure 6.9- Difference
plot of estimated spectrafrommeasuredspectra oftheGamblin
verificationtargetresulting fromtheuse ofdatasimulated withtheWratten55and
unfiltered camera sensitivitiesinthenoise case 6-15
Figure6.10-Individualreflectance spectrafor bothcases
usingtheWratten 55and
unfiltered camera sensitivities compared withthemeasureddata. Thexaxis
represents wavelength
(nm)
andyaxis represents reflectancefactor. Seetextforcolorandlinecodes 6-17
Figure 6.1 1 - Spectral
transmittanceoftheWratten80Dand90filters 6-18
Figure 6. 12- Camera
sensitivitieswiththeWratten80Dand90filtersapplied. The
dashed linesrepresentsensitivitiesresulting fromtheuse oftheWratten 90 6-19
Figure6.13
-Normalizedcamerasensitivitiesresulting fromtheWratten80Dand90
filters. Thex axis represents wavelength
(nm)
andyaxis representsnormalizedspectralsensitivity 6-20
Figure6. 14- Selectedreflectance spectrafor bothcases
usingtheWratten80Dand90 filteredcamera sensitivities compared withthemeasureddata. Thexaxisrepresents
wavelength
(nm)
andyaxis represents reflectancefactor. Seetextforcolor andlineFigure 6.17- Normalized
camera sensitivitiesresulting fromtheWratten 38and60
filters. Thexaxis represents wavelength
(nm)
andyaxis represents normalizedspectralsensitivity 6-24
Figure 6.18 - Difference
plot ofthemeasured andestimatedGamblinspectrausingthe WR-38 andWR-60filtercombinationinthenoisecase 6-25
Figure 6. 19
-Camerasensitivitiesresulting fromtheWratten2Candunfiltered
combination. Thedashed linerepresenttheunfilteredsensitivities 6-26
Figure 6.20- Selected
reflectancespectrafor bothcasesusingtheWratten2Cand
unfilteredcamerasensitivities comparedwiththemeasureddata. Thexaxis
representswavelength
(nm)
andyaxisrepresents reflectancefactor. Seetextforcolorandlinecodes 6-27
Figure 6.21 - Difference
plot ofestimated andmeasured spectraresulting fromthe
noiseless simulationusing theWratten 2Candunfiltereddata 6-28
Figure6.22- Difference
plot of estimated and measured spectraresultingfromthe simulation
including
noiseusing theWratten 2Cand unfiltereddata 6-29 Figure 7.1 - IR Cutoff Filtermounted onthecamera 7-2
Figure 7.2
-Scene setupatMCSL 7-2
Figure 7.3- Scene dimensions
andgeometry ;. 7-3
Figure7.4- Histogram
examples usedto
help
determineoptimal exposuretime. For thesetwo,theunfilteredimagewas used. Theoptimized(a)
wastakenat 1/30of asecond. One stopgreater
(b.)
takenat 1/15*of a second yields overexposure 7-5Figure 7.5
-Imaging
pipeline usedforallfiltercombinations 7-7 Figure 7.6-a,
b,
and c- Averagemeasureddigitalcountsversusaveragesimulated
digitalcountsfortheunfilteredimageoftheCCDC 7-10
Figure7.7- Experimental
versus simulated variance oftheunfiltered
CCDC,
showinganinability
toaccuratelymodel variancetomatchtheexperiment 7-14Figure 7.8
-a,
b,
and c- Averageexperimental versus simulateddata fortheEsserand blues
data,
showinggoodlinearfit butoffby
a scalarfortheCCDC 7-16Figure 7.9- Experimental
versus simulated variance fortheEsserandbluestarget
showingthemodel's
inability
tohandletexture 7-16Figure 8.1- Flowchart
ofthedataprocessingpipeline 8-2
Figure8.2- Data
processingattheevaluationlevel 8-3
Figure 8.3 - Estimated
spectra of samples whereRMSspectral errordecreasedand
CIEDE2000 increased forthe 55andNFcombination. Thered, dashed line
representstheunoptimizedestimate,thegreenisoptimized,andtheblue is
measured. Thex axisiswavelengthandthe yaxisisreflectancefactor 8-7
Figure 8.4- Differenceofestimated reflectance spectrafrommeasuredreflectance
spectrafor bothoptimizedandunoptimizedcasesforthe55 andNFcombination.
The
blue,
dashedlinerepresentstheunoptimizedestimate,thered,solidisoptimized. Thex axis iswavelength; theyaxisisreflectancefactor difference.... 8-8 Figure8.5- Reflectance
ofblankpatch37fortheoptimized andunoptimizedcase
compared with measured spectra 8-10
Figure 8.6- Histogram
ofindividualpixel%RMSspectralerrorfor blankpatch37- both
optimized and unoptimized case 8-10
Figure 8.7a andb- Histogram
ofindividualpixelCIEDE2000for blankpatch37
Figure 8.8
-Estimatedreflectance spectra of sampleswhereboth RMS spectral error and CIEDE2000 decrease forthe55andNFcombination. Thered,dashed line
representstheunoptimizedestimate,thegreenisoptimized,andtheblue is
measured. Thex axisiswavelengthandtheyaxisisreflectancefactor 8-13 Figure 8.9 - Difference
plotsforestimated spectrasamples whereboth RMSspectral errorandCIEDE2000 decrease forthe55andNFcombination. The
blue,
dashed linerepresentstheunoptimizedestimate,thered, solidisoptimized. Thex axisiswavelength; the yaxisisreflectance factor difference 8-14 Figure 8.10- XYZ
arrowplotsfor55andNFcombinationcomparingtheunoptimized
and optimized exposures 8-15
Figure8.1 1 - L*a*b*
arrowplots fortheWratten 55 andNFcombination 8-16 Figure8.12 -55andNFtransformationmatrix channels withtheblue linerepresenting
thechannelfromtheunoptimizedmatrixandthegreendashed linerepresentingthe
optimizedmatrixchannels 8-18
Figure8.13 - Estimated
reflectancespectra of samples whereRMSspectral error decreasesandCIEDE2000 increases forthe60andNFcombination. The red, dashed linerepresentstheunoptimizedestimate,thegreenisoptimized,andtheblue ismeasured. Thexaxisiswavelength andtheyaxisisreflectancefactor 8-20 Figure 8.14- Difference
ofestimatedreflectance spectra of samples whereRMSspectral errordecreasesandCIEDE2000 increases forthe60andNFcombination. The
blue,
dashed linerepresentstheunoptimizedestimate,thered, solidisoptimized. Thex axisiswavelength;
they
axisisreflectancefactor difference 8-21 Figure8.15 - Estimatedreflectancespectra of samples whereboth RMS spectral error andCIEDE2000 decrease forthe60andNFcombination. Thered,dashed line representstheunoptimizedestimate,thegreenisoptimized,andtheblueis
measured. Thex axisiswavelength andtheyaxisisreflectancefactor 8-22 Figure 8.16- Difference
plots forestimatedspectrasamples whereboth RMSspectral error andCIEDE2000 decrease forthe60andNFcombination. The
blue,
dashed linerepresentstheunoptimizedestimate,thered,solidisoptimized. Thexaxisiswavelength;theyaxisisreflectancefactor difference 8-23 Figure8.17
-XYZarrowplots fortheWratten60andNFfiltercombination 8-25 Figure8.18 -L*a*b*
arrow plotsfortheWratten 60andNF combination 8-26 Figure 8.19 - Wratten60
andNFtransformationmatrix channels withtheblue line representingthechannelfromtheunoptimized matrix andthegreendashed line representingtheoptimized matrix channels 8-28 Figure8.20-Selectedspectra estimates fortheWratten2CandNF combination. The
red,dashed linerepresentstheunoptimizedestimate,thegreen xline isoptimized, andtheblue ismeasured. Thex axisiswavelengthandtheyaxisisreflectance
factor 8-30
Figure 8.21 - Transformationmatrix channels fortheWratten 2CandNFcombination
Figure 8.24
-Averagereflectance over wavelengthfortheEsserandblues
characterizationtarget 8-37
Figure 8.25- AverageEsser
andbluestargetreflectance multiplied
by
source spectralpowerdistributionover wavelength 8-38
Figure 8.26
List
ofTables:
Table4.1
-Cumulativecontributionindexandmetricsforthe 1931 standard observer and illuminant D65 calculatedinthereconstructionoftheEsserandBluestarget
reflectances 4-6
Table4.2-Metric correlation coefficients...'. 4-10
Table4.3
-Sorting
Criteriaandresultingnumbersof combinations 4-13 Table 4.4-Metrics ofthe
top
eightfiltercombinationsresulting fromthenoiselesssimulation 4-14
Table4.5
-Integratedcamerasignals ofthe
top
eightfilters resulting fromthenoiselesssimulation 4-14
Table 4.6- Matrixfor Wratten 81
andNoFilterCombination 4-18
Table4.7- Transformation
matrixforWratten40and80Afilters 4-21 Table 6. 1 Selectioncriteria usedtodefinemagenta, red,and cyan groupsrepresenting
differenttypesofperformance 6-7
Table 6.2- SelectedFilterCombinations
sorted
by
average%RMSspectral error.C=cyan,
M=magenta, R=red,
G=green-seetextfor definitions 6-8 Table 6.3- Integratedcamera signals ofthe selectedfiltercombinations 6-9 Table 7.1 - TestedKodakWratten
absorption gelatinfiltercombinations(NF denotesno
filterwasused) 7-4
Table 7.2- Optimized filter
timesforKodakWrattenfilters 7-5 Table 7.3
-Maximumdigitalcountsbetweenoptimizedtimeand optimizedtime+ 1
stop 7-6
Table7.4- Comparison
of average experimental and model valuesfortheCCDC 7-11 Table 7.5- Comparison
of model and experimentaldatawith exposuretimesdividedout. 7-12
Table8.1 - Average
statisticsfromtheGamblinverificationtarget 8-4 Table8.2- Average
performanceforEsserandBluescharacterizationdata 8-5 Table8.3 - CIEDE2000 Components forthe55
andNFcombination,showingan
increase in C 8-12
Table 8.4- CIEDE2000
components forthe60/NF filtercombinationshowing increase in
C 8-24
Table8.5- Averageandindividual digital
countsfrom Cobalt Blue Patchwithresulting
Munsell Color Science
Laboratory
Spectral Notation:
constantsandvariables a, b....,z
functions a,b, .... z
vectors a,
b,
...,z
matrices
A,B,
a9 JLJtranspose T
inverse -1
mean bar
estimate hat
covariance Cov
pseudo-inverse pinv
wavelength X
spatial position x,y - origin
(1,1)
numberofpixels k
numberofwavelengths n
numberofcolor samples q
numberof imageplanes
(bands)
btime t
spectral reflectanceofobject rx r R
SPDof illuminant Px P P
spectral radiance
Lx
Lspectralirradiance
h
spectral sensitivitiesofdetector Sx s S
spectraltransmittancesoffilters
fx
f Fdigitalcounts
ofi'h
band
dt
d Dnoise "
residual error 8
transformationmatrix A,T
eigenvectors ex e E
eigenvalues a a
Chapter 1
-Introduction
and
Overview:
Introduction:
"Onepictureisworth athousandwords." FredR.Barnard
Images are used for a variety ofpurposes.
They
serve as records and givehistorical informationabouttimeperiodsrangingfromthepaintings of cavemento theart
ofthemiddleagesto thedigital imagesof
today
thatwillbeusedby
futuregenerationstostudythe occurrences of our life andtimes. Images are used to convey ideas and are a
form of selfexpression.
They
can evoke powerful feelings in an individual and areconstantly manipulated in the mass media to sway public opinion.
Depending
onhowimagesarerecorded,the spatial, temporal,and color properties canberelatedtophysical
properties providingdataused invarious scientificdisciplines allowingusto learnabout
ourselves and our environment.
The acceptable quality level for the imaged data
typically
depends upon theapplication it is used for. The average consumer orbusiness is not as concerned with
accuracyas
they
are with aesthetics. For example, it isoftendesirable toaltertheimageto match memory color as opposed to actual color.
Many
businesses and advertisingfirms alter or enhancetheappearance of a product in orderto increase sales. There are
manydifferentsituations whereappearanceismoreimportantthantruth.
and reproduction,accuratehigh quality
imaging
is neededfor avarietyof reasons. Theimages are often used for archival purposes, where an accurate representation is
necessarytopreservethepiece
long
afterit has deteriorated(Day,
E.A.2003)
ortomakesurethata pieceis
being
restoredtoremaintrueto the artist's original vision.Also,
ifareproduction is ever
desired,
the quality ofthe data is of paramount importance as theoutput ofanysystem canonly beas good as itsworstcomponent.
Many
imaging
and reproduction devices and applications are designed to takeadvantageofthehumanvisualsystem. Thesesystemsrelyon metamerism(Berns
2000),
where a visual match can be achieved between two objects with different physical
properties. Examples of metameric systemsinclude television,which usesred,green and
bluephosphorsordigitalcamerasthataredesignedwithsensorsusingcolorfilterarrays.
Themajorconsequenceofrelyingon metameric systems isthat thedataacquired
by
thedevicearedependentontheilluminantandtheobserver(Imai2000b;
Imai2002).Thismeansthatimagesor reproductions willonlymatchtheoriginal under a given set of
viewingconditions. As aresult, images madeinthismannerlackthe accuracyrequired
for any kind ofarchiving or analysis. An excellent example comes froma case in the
1930s,
whenmuch art restoration work wasbased solelyon visual matching. APicassopaintingfrom his blues period was
being
restored, and severalinpaintings were madeby
theconservator. Whilethebluepigmentsheusedappearedtomatchvisually,
they
werespectrally different from the originals used
by
Picasso.Later,
when this painting wasimaged withcolor
film,
the areas that had been inpaintedby
the conservator appeareddifferent to thecamera as it hadadifferentset of spectral sensitivities, andthe
inpainted
A solution to the metamerism problem is the use of multispectral imaging.
Multispectral
imaging
involves the use of sampling multiple channels correlating todifferent points across the electromagnetic spectrum. Several different systems have
been devisedatvariousinstitutionsaroundtheworldtoresearch methods of multispectral
image capture.
Many
factors must be taken into consideration to make multispectralimaging
work. There are many questions thatneed to be asked, such as what will theimages be used for and how is an acceptable level of quality defined? How many
channels are appropriate? Where dothepeaks ofthe channels needtofall in thevisible
spectrum to create the appropriate sampling interval? How will the
imaging
beperformed? Thetypesof
lights,
thetargets,
the cameracharacteristics, all mustbetakenintoconsideration.
The mainpurposeofthis thesis wasto
develop
a methodto selectthebest filtersfrom a set ofreadily available filters to be used with atrichromatic digital camera that
will provide reasonable results with respect to both colorimetric and spectral
performance, andto
identify
thepotential problems associated with various componentsofthesystem. Mostoftheprevious workdoneusing thismethodhas beenperformedat
MCSL over the last six years,
beginning
with the work ofImai, Fairchild,
and Rosen(Fairchild
2001;
Imai1998a-i;
Imai1999;
Imai2000a,b;
Imai2002;
Rosen1999),
andthisworkis a natural continuation
by
trying
todevelop
methodstohelp
findthebestsetoffilterstobeused with a giventrichromaticcamera as wassuggested
by
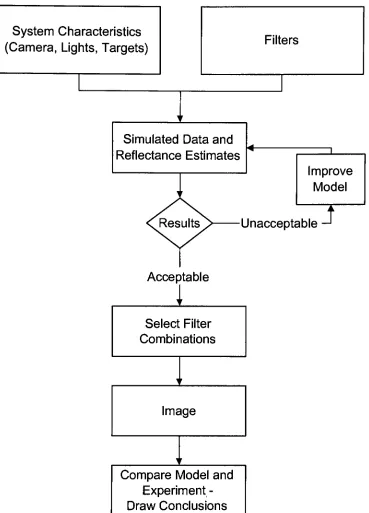
Imai (2000a).to establish a relationship between digital output and spectral reflectance. This
relationship is thenusedtomake spectral reflectance estimations ofaverificationtarget.
Once the spectral reflectance ofthe verification target is estimated, appropriate quality
metricscanbeused and afiltercombination canbechosenforthe trichromaticcamerain
question. Figure 1.1 shows a flowchart ofthe general process, which was used as the
System Characteristics
(Camera, Lights,
Targets)
Filters
V
Simulated
Data
andReflectance Estimates
iImprove
Model
i'
Unacceptable
T
Acceptable
Select Filter
Combinations
Image
Compare Model
andExperiment
[image:21.527.85.454.43.556.2]-Draw Conclusions
Figure 1.1- Generalprocess
cameratoperformspectralreflectanceestimation,beusedas part of a recommendationto
theNational
Gallery
ofArt,
Washington D.C. andTheMuseum ofModern Art in NewYork
City
inthe constructionof aspectralimaging
system, as well as addtoandfurtherdocumentthegrowing
body
of spectralimaging
research atMCSL.Overview:
Chapters Two and Three give some background on spectral
imaging
and theequipment used for this thesis. Chapter Two
briefly
discusses some ofthe previousresearch done with regardsto spectral imaging.
Here,
the three main types of spectralimaging
systems are discussed and some of their advantages and drawbacks aredescribed. Chapter Three describestheequipment usedforthis thesis. Thisincludesthe
camerasystem,
lights,
targets,
and other major aspects ofthesystembeing
evaluated.ChaptersFourthroughSix discussthe simulations performed andhowthemodel
progresses froma simple linear model that is only concerned with average values to a
more complex modelthatincorporatesaspects of system noise.
Chapter Seven describes the
imaging
experiment, where filter selections madebasedontheresults ofthesimulations are usedina practical situation. Theexperimental
dataarethencompared withthesimulated
data,
and sourcesof error areidentified.ChapterEightgives an analysis ofthree filtercombinations, which were chosen
based on simulated performance, experimental performance, and an example of poor
overall performance.
Finally,
ChapterNinegives arecapofthis thesisand makes suggestionsfor futureChapter
2
-Spectral
Imaging
Systems
Background:
Spectral
imaging
and reproduction has become anincreasingly
important areaofresearchattheMunsell Color Science
Laboratory (MCSL)
as well asatotherinstitutionsaround the world (Berns
1999;
Berns2003;
Burns1998;
Burns1999;
Day
E.A.2003;
Day
E.A.2002;
Fairchild2001;
Haneishi2000;
Hardeberg 2003; Hardeberg
1999;
Imai1998a-i;
Imai1999;
Imai2000a,b;
Imai2002;
Imai2003;
Johnson1998;
Konig
1998;
Konig
1999;
Quan2000;
Rosen 1999). Several different methods have been used toperform spectral image capture and reproduction. Earlier systems at MCSL were
designed using filmasthespectraldetector (Rosen 1999). Astheavailabilityandquality
ofdigital camerashas
increased,
CCDcameras have becomecommonlyused. Therearecurrently three methods that are widelyused in
designing
spectral-based digital camerasystems. Theseare narrowband imagecapture with a monochromatic sensor,wideband
imagecapture with a monochromatic sensor, and wideband imagecapture with an
off-the-shelf trichromaticdigitalcamera.Eachmethodhas itsadvantages anddrawbacks.
Narrowbandcapture:
The firstmethodinvolves theuse of a monochromaticdigital camera and narrow
band sampling. There are many choices of
technology
available that provide thespectrally narrowfiltrationrequired.
Typically,
aliquid crystal tunable filter(LCTF)
isusedas it has the advantages of
being
solid state and computercontrolled meaningthatexperimentsthattheLCTFstillsuffersfromangular
dependencies,
butnot as severeasinother
technologies,
suchasnormalinterference
filters. WhiletheLCTFdeliversthemostaccuracyas many samples across thevisible spectrum are used, it is generallythemost
costly,time consuming, andgenerates large amounts ofdata thatmust thenbemanaged
later. Figure 2.1 shows a LCTF attached to a Roper Scientific Quantix at the MCSL
[image:24.527.177.376.214.368.2]Spectral
Imaging
laboratory.
Figure 2.1- Quantixcamera withLCTFattached.
Widebandcapture:
Thesecondmethod uses a smaller set of wideband filterstocapturedigital image
data and then uses reconstruction algorithms to estimate the reflectance spectra of an
object. This approachproduces reasonable results because bothman made and natural
materials generally have smooth spectral reflectance shapes, thus the sampling interval
canbereducedtobetweeneight andtenchannels withbroader bandpass filters whilestill
achievingaccurate results. Thishas generally beentheaccepted method ofimagecapture
as it is a good compromise between accuracy and efficiency. Systems using this
as the National
Gallery
inLondon,
England and the UffiziGallery
inFlorence,
Italy.These
institutions
are involved in the VASARI (Visual Arts System forArchiving
andRetrieval of
Images)
program, which has successfully used a seven channel cameratocapture multi-spectral informationand map it
directly
to colorimetric space. Figure 2.2showstheVASARIsystem.
Figure2.2- The VASARIsystem(National
Gallery,London).
Trichromaticcamerawith absorptionfilters:
The third methoduses ahigh qualitytrichromatic digital camera in conjunction
with spectral absorption filters to acquire unique spectral information. This method
enables three channels ofdata to be captured per exposure as opposed to one. This
red, green, and blue spectral sensitivities ofthe camera. Figure 2.3 shows the IBM
Pro3000systemusedin manyoftheexperimentsperformed atMCSL.
Figure 2.3
-IBM Pro3000 scanningcamera.
Conclusions:
This chapter has given a brief discussion ofthe three main technologies most
commonly used to perform spectral image capture.
Usually,
the choice of whichtechnology
touse willdependuponseveraldifferentfactors,
including
thepurposeoftheimages,
price, availability, and accuracy. As was mentioned in theintroduction,
thisthesis is mainly concerned with the trichromatic approach and
developing
methods toChapter 3
-Equipment:
Purpose:
Themaingoal ofthisthesiswastoshowthatit ispossibleto selectfilters thatcan
beused with ahighresolutiontrichromaticdigital cameratoperform spectral reflectance
estimation. The
following
equipmentwas used formeasurement, modeling, simulation,andfortheexperiment.
Pixel Physics TerraPixcamera system:
The TerraPix camera
by
PixelPhysics,
shown in Figure3.1,
uses aMegavisionT4 camera back. This back is based on the Kodak KAF-16801E CCD sensor. This
sensor providesimageswitha resolution of4096X4096pixels. The CCDuses aBayer
pattern colorfilterarray, andtherawdatamustbe interpolatedto deliverred, green, and
blue imageplanes. The cameraback was used with a Contax 645 camera
body
and an80mm Carl Zeiss T*
Diagnon lens. The image capture software was custom made
by
Pixel Physics. Other processing software used was created
by
Lawrence Taplin atMCSL. For simulations, the camera's spectral sensitivities were also provided
by
Pixel0.16
|
0.04 Q.CO
0.02
500 550 600
Wavelength
(nm)
Figure 3.2- TerraPixunfiltered spectral sensitivities.
ElinchromeScanliteDigital 1000:
Two Elinchrome ScanliteDigital 1000studio lightswere usedforthesimulations
and experiment. Chimera Pro Light diffusers were attached to the light sources to
provide
diffuse,
evenlighting. Figure3.3 shows the light sources andFigure 3.4 showstheir relative spectral powerdistribution measured with aPhoto Research Spectra Scan
PR-650 handheld spectroradiometer. At the image plane, the correlated color
temperature was measured to be approximately 3,334 degrees Kelvin. The luminance
too
Figure 3.3- Scanlitewithlight diffuser.
450 500 550 600
Wavelength
(nm)
650 700
Hummeltal,
Germany)
was used in combination with the reflectance data ofthe bluepigment target consisting of phthalocyanine, ultramarine, cobalt, and Prussian blues
mixedin differentcombinationsandconcentrationswithtitaniumwhite. TheEssertarget
was chosenbecause ofits spectralvariability. Itwas necessaryto add the spectrafrom
pigments ofthe blues targetbecause thesepigments are
typically
found in art paintingsbut are not represented on the Esser target. The Gamblin paint target was used as the
main verification target. Itwas composed of30 pigments commonly found in artwork,
each mixed at two concentrations with titanium white. Both the blue pigment and
Gamblintargetwerehandpainted onto a piece of canvasboard found inmanyart stores.
Figure 3.5 showsthereflectance spectrafor allthe samples ofboth these targets. Other
targets included a Kodak
Gray
Scale as well as the GretagMacbeth ColorChecker andColorChecker
DC,
shown in Figure 3.6. The targets were measured using aGretagMacbeth ColorEye XTH handheld
integrating
sphere spectrophotometer withthe400 450 500 550 600 650 700 750
nm
1
0.9
0.8
..0.7
o
I
0.60.5
"0.4
*0.3
0.2
0.1
0
;^a ML
"*""%*~ "
^"."r^rrTTz?^*.
IV
\ /j$f
\\
\\Ji/j
Mivi
i^"-^->;rf^
--/*>=^^
/
/llz^^^Lv^vvz
/U/ /^-^rfc-^ .1 fZ *^7 yfl ^*n v
IllU- <i Zt^ yJZ'
Wwk
i.
^^^^^^l
~i i i
' i
400 450 500 550
nm
600 650 700 750
Figure 3.5- Reflectancespectra of all samples ontheEsserandBluescharacterizationtarget (top)
Figure 3.6- Targetsimaged: Bluepigments(upper
left),Macbeth Colorchecker(center),Essertest target(upperright),Kodak
Gray
Scale(left/center),halon disk(right/center),MacbethCCDC(lowerleft),Gamblinpigments(lower right)
Filters:
A set of105 Kodak Wratten filters were evaluated. These selective absorption
filters are used in a wide variety oftechnical and photographic
imaging
applications.Transmittance filters were selected because their spectral properties do not have the
angulardependencethatisfoundininterference
filters,
showntohavea significant effecton spectral estimation and reconstruction accuracy. The nominal data used for
simulationswere provided
by
Kodakand spanthewavelength range of400-730nm.AUnaxis Balzers IRcutofffilterwas usedtolimitthe spectrum ofinterestto the
visible region (400 - 730
nm). The transmittance data used for simulations was
measured with a Macbeth ColorEye 7000
integrating
sphere spectrophotometer in theProcessing:
All simulations and data processing were performed using Matlab versions 5.3
and 6.5. Code for all processes are in Appendix
B,
and is adaptable to any platformChapter
4
-Filter
Selection for Spectral
Estimation using
a
Noiseless Camera Model:
Purpose:
This chapter is concerned with
describing
filter selection in a noiseless case.First,
thetheory
of spectral reconstructionusingmultiple camera signals and eigenvectoranalysis is
described,
andthenthemethod and metrics usedtoselect an appropriate filterarediscussed.
FilterSelectionMethod:
The first factor that was considered was the method of searching for filter
combinations. Several different approaches can be used and have been discussed
(Hardeberg
2003). The first and most intuitive method was to simplytry
to find acombination of filters where the dominant wavelength is equally spaced across the
spectrum of interest. While this approach worked well for monochromatic cameras
which only consider one channel at a time and have a relatively flat response when
unfiltered, it is very difficult to find a filter that will cause three channels in a
trichromatic camerato shiftsignificantlywithoutentirely
blocking
thesignal in anyonechannel. The second, which was first proposed
by
Maitre and expanded onby
Hardeberg,
involvesmaximizing theorthogonalityinthecharacteristicreflectance vectorspace
(Hardeberg
2003). This method was shown to befast,
but only considered onechannel at a time and demonstrated suboptimal results. The final method was an
exhaustive search which considers all possible combinationsoffilters inquestion. Dueto
thecomplex natureofthe taskat
hand,
thismethodwas chosenbecause itwill,in theory,findtheoptimal results fromallcombinations. Caremustbetakenwiththisapproach as
the number of computations can easily become very large given that the number of
evaluationsis determined
by
Eq.4.1g=
I*
N!
(4.1)
K!(N-K)!
whereg is thenumber ofcombinations, Nisthe total number offilters inthe set,andK
arethenumber offilters
being
combined(Hardeberg
2003).Spectral Reconstruction Theory:
Reflectance spectra of objects canbeestimated
by
usinga priorispectral analysiswithdirectmeasurement and
imaging
of color patchestoestablish arelationshipbetweencameradigitalcountsandspectralreflectancefactor (Imai 2000a).
The spectral reflectances ofa set of samples from a characterization target are
measured and (n x q) reflectance matrix R is
formed,
where n is the number ofwavelength measurements and q is the number ofmeasured samples.
Using
principalcomponent analysis, <r eigenvectors
{ei...ef}
and the associated eigenvalues arecalculated and arranged in
descending
order. The cumulative contributionindex(CCI),
v thatdescribes the amount of variance explained
by
the first i eigenvalues isgivenby
where aisthevectorof eigenvalues. The CCI is generallyusedto
help
selectthenumberof eigenvectors to beused inthe spectralreflectance reconstruction inconjunction with
othercolorimetric and spectral metrics(Imai 2000a).
Theestimatedspectralreflectanceis defined
by
Eq.4.3R=E,a,
(4.3)
A
where
E,=[ei...e,],
the coefficients a(=[ai...a,] , and R represents the estimatedreflectances.
A camera system gives (b x q) digital counts,
D,
where b is the number ofchannelsand q isthenumber of samples or pixelscorrespondingtovarious samples. In
general,thenumber of channels
being
used shouldbeequaltoor greaterthan thenumberof eigenvectors
(Imai, 2000a)
used in the estimation. The relationship between theeigenvalues
a,-ofthe targetanddigitalcounts ofthecharacterizationtarget
Dc
isgivenby
Eq. 4.4:
Te=a,/wn>(Dc)
(4.4)
wherepinvQ denotes the Matlab function which performs the equivalent of a
pseudo-A
inverse calculation. The matrix
Te
can then be used to estimate eigenvalues a, fromdigitalcounts of a verificationtarget
Dv
as shownin Eq. 4.5:a,=TeD
(4.5)
Finally,
reflectance oftheverificationtargetRv
is estimatedby
substituting Eq. 4.5 intoRv=E/reDv
(4.6)
Acamera withlinearphotometric responsecanbemodeledusingEq.
4.7,
andthesimulated digital counts can then be used to establish the relationship between camera
digitalcountsandobjectspectralreflectance:
dk=XpWrWS//(A)f(/l)AJl
(4.7)
X
where p(A.) is the source relative spectral power
distribution,
r(k) is the spectralreflectance ofthe object, s^QC) is the appropriate camera channel sensitivity,
f(A.)
is thefilter
being
used,and u=R,
G,
orB.Experimental:
An experiment was designed to
identify
a subset offilters from a set ofreadilyavailable filterstobeused forspectral reflectance estimation with atrichromaticcamera.
The simulation experiment involved calculating the TerraPix camera's filtered camera
signal when
imaging
a characterization and verificationtarget, estimatingthe reflectanceofthesamples,andthenmakingafilterselectionthatprovidesgoodperformance.
The eigenvectors and eigenvalues ofthe combinationEsserandbluestargetwere
calculatedusing eigenvector analysis andthe knownreflectance spectra ofthepatches.
The eigenvectors were thenranked from most significantto leastsignificant and a CCI
was calculated. Thenumberof eigenvectors selectedis typicallyacompromisebetween
eigenvectors calculated for the CIE 1931 standard observer and illuminant
D65,
forwhich all subsequent calculations willbemadeunless notedotherwise,showingthat99%
of the variance in the data can be described with six eigenvectors, the CCI stops
increasing
significantlyat six eigenvectors, andthe metrics stopdecreasing
significantlyTable 4.1-Cumulative
contributionindexand metricsfor the 1931standard observer andilluminant
#of
Eigenvectors CCI
Average % RMS spectral error
Average CIEDE2000
Average Metameric IndexD65->A
Average Metameric IndexA->D65
1 0.63 18.2 44.71 4.70 5.78
2 0.86 6.7 18.02 1.34 2.08
3 0.97 3.3 4.18 1.27 1.49
4 0.98 2.4 1.29 1.25 1.43
5 0.99 1.7 0.97 0.29 0.30
6 1.00 1.3 0.52 0.20 0.23
7 1.00 1.1 0.27 0.15 0.15
8 1.00 0.9 0.18 0.11 0.13
9 1.00 0.8 0.16 0.04 0.04
10 1.00 0.6 0.14 0.02 0.02
11 1.00 0.5 0.15 0.02 0.03
12 1.00 0.3 0.06 0.02 0.03
Based on this
information,
data from previous experiments analyzing colordifference and spectral RMS error showing that six channels is sufficiently accurate
(Imai, 2000a),
and information obtained from theCCI,
six channels obtainedby
combining the three channels from each image were used for this and the
following
experiments.
Having
determined an appropriate number of eigenvectors to use in thereconstruction,allpossiblecombinations ofdata fromtwofilters simulated with equation
4.6were evaluated. Thedataweresimulatedfor digitalcounts generatedfroma response
integrated over the 400
-730 nm range. This range was chosen partly because many
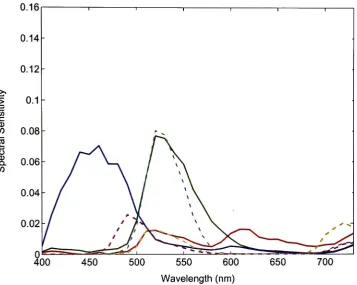
showrespectivelythe spectraltransmittance propertiesandtheresulting camera spectral
sensitivitiesoftheIRcutofffilter.
400 450 500 550 600
Wavelength
(nm)
650 700
0.16
0.14
0.12 >>
o
c
9> o m 111 E
C
CO
O
^ 0.08
>
'in
c
CD
CO
TO
0.04 o
CO Q.
CO
0.06
0.02
400 450 500 550 600 650 700
Wavelength
(nm)
Figure 4.2- TerraPixspectral sensitivities withUV/IRcutoff applied.
Using
the 105 Kodak Wratten filters and the unfiltered case, a total of 106separate sets of simulated digital counts were created and takenin combinations oftwo
givingatotalof5565unique combinations. Thesecombinations were usedtoreconstruct
the reflectance spectra of the Gamblin verification target. The mean and maximum
CIEDE2000 for illuminant D65 and the2 degree observer was calculated andthe RMS
spectral error overtherange of400- 730
nmacross all thepatches was thencalculated
ResultsandDiscussion:
Figures 4.3and4.4showthedistributionofthefiltercombinations with respectto
the average CIEDE2000 and RMS spectral error. It not only shows that a large
percentage ofthe combinations perform equally well, but the range ofthe metrics are
relatively small for those that doperform well. This lends to a degree of
difficulty
inselecting the best combinations from just the mean and maximum metric measures.
Another method needed to be devised in order to eliminate combinations that were
unlikely to perform well and to reduce the number of filter combinations to a more
comprehensible level. The
following
method was used to sort the filters and makeeliminations.
1800
10 15 20
Average %RMS Spectral Error
25
10 15
Average CIEDE2000
20 25
Figure 4.4-Histogramofthe
averageCIEDE2000calculatedfromallfiltercombinations.
The metrics'
correlation coefficients were calculated and thepairthat correlated
best was plotted against each other. Table 4.2 shows the calculated correlation
coefficients.
Table 4.2- Metriccorrelation coefficients.
Average
spectralRMS
Maximum
spectralRMS
Average
CIEDE2000
Maximum CIEDE2000
Average
spectralRMS
1.0000 .9013 .9019 .7780
Maximum
spectralRMS
0.9013 1.0000 .7810 .7807
It shows that the average CIEDE2000 and RMS spectral error correlate best and were
used as a first criteria. The maximum CIEDE2000 and RMS spectral error were then
used as a second selection criteria. The combinations were then sorted
by
selectingthreshold levels ontheplot oftheaveragemetrics, observingwherethosepoints plotted
on the maximum metric plot and then selecting thresholds on the maximum and
observingwherethenewgroup fallsontheaverageplot. Thisprocesswas repeated until
a reasonable number was found. Figures4.5 and4.6 showthemetricplots andTable4.3
shows the thresholds and theresulting number offilter combinations after each level of
selection. In Figures 4.5 and
4.6,
the bluerepresentstheentire set, the green representsmembersoftheset afterthefirstsort, andthered represents members oftheset afterthe
25
20
15
o o o CN
LU Q UJ O w at
3
10 15
Average% Spectral RMS
20 25
Figure 4.5- AverageCIEDE2000vs. average.RMSspectral error plot usedto
aidin selecting
120
100
o o o CN 111 Q LU
o x co
20 30 40 50 60
Maximum% Spectral RMS
70 80
Figure 4.6-Maximum CIEDE2000
vs. maximumRMSspectral error plot usedin selectingthreshold
sortingcriteria,withblue representingtheentireset,greenrepresentingthefirstsort,and red
representingthesecond.
Table 4.3
-Sorting
Criteriaandresultingnumbers of combinations.Selection Criteria
Resulting
NumberofFilterCombinationsAverage CIEDE2000<
1.5,
AverageRMS<2.5%
1351
MaximumCIEDE2000<
4,
MaximumAverageRMS<6%
635
Average CIEDE2000<.6,AverageRMS<
2%
71
Once the number of selections reached a reasonable number, the filter
combinations were then eliminated
by
calculating the area of the filtered camerasensitivities for each curve. This would eliminate curves where the signal would be
signals were greater than 2.5 reduced the list to eight combinations whose metrics are
shownintable4.4andintegratedcamera signalsare shownintable4.5.
Table 4.4- Metricsofthe
topeightfiltercombinationsresulting fromthenoiseless simulation.
Filter 1 Filter 2
Average % Spectral
RMS
Maximum % Spectral
RMS
Average CIEDE2000
Maximum CIEDE2000
WR-40 LIGHT GREEN WR-78A BLUISH 1.9 5.0 0.57 2.91
WR-40 LIGHT GREEN WR-80B BLUE 1.9 4.9 0.58 3.06
WR-66 VERY LT GREEN WR-78B BLUISH 1.9 4.5 0.51 2.79
WR-40 LIGHT GREEN WR-80A BLUE 1.9 4.9 0.59 3.12
WR-66 VERY LT GREEN WR-80C BLUE 1.9 4.6 0.54 3.05
WR-66VERYLT GREEN WR-78A BLUISH 1.9 4.7 0.58 3.30
WR-81 YELLOWISH NF 2.0 5.5 0.52 1.73
WR-3 LIGHT YELLOW WR-82C BLUISH 2.0 5.0 0.49 2.30
Table 4.5- Integratedcamera signals ofthe
topeightfiltersresu
Iting
fromthenoiselesssimulation.Integrated Camera Sgnal
Filter1 Filter 2 R1 G1 B1 R2 G2 B2
WR-40 LIGHT GREEN WR-78A BLUISH 3.18 5.24 2.65 3.86 4.16 5.00
WR-40LIGHTGREEN WR-80BBLUE 3.18 5.24 2.65 4.31 4.38 5.62
WR-66 VERY LT GREENWR-78BBLUISH 5.95 8.26 4.79 7.15 6.90 6.86
WR-40 LIGHT GREEN WR-80A BLUE 3.18 5.24 2.65 3.39 3.79 5.33
WR-66 VERYLT GREENWR-80C BLUE 5.95 8.26 4.79 6.42 6.14 6.61
WR-66 VERYLT GREEN WR-78A BLUISH 5.95 8.26 4.79 3.86 4.16 5.00
WR-81 YELLOWISH NF 15.89 12.85 9.95 17.83 14.75 11.73
WR-3LIGHTYELLOW WR-82C BLUISH 16.08 13.07 6.68 8.51 8.31 7.68
Final selections could only be made after evaluating curve shapes and the
resulting camera sensitivities as well as the different metrics measured for this case.
yield acomparativelygoodRMS spectralerror andverygood colorimetricresults,yetthe
resultingcamera sensitivities are almostequivalent,as showninFigure4.9.
Findmetricsthatcorrelate
best,
plottwo scatter plots of
correlating metrics
Selectgroups with threshold
levelson oneplot, plotthe
groups onthesecondplot
NO- Alternate
plots
that threshold isselected from
and plotted on
Find area of
integratedsignals
- eliminatefilters
with lowsignal
Evaluate remaining
curves andcamera
sensitivities
-make
selections
Figure4.7- Flowchart
o CO
Li-Cl) o
C CO
*s
E
CO c
CO
100 450 500 550 600 650
Wavelength
(nm)
Figure 4.8- Wratten 81yellowishfilterspectraltransmittance.
c
o
ui
E
+-< c CO 3
0.16
0.14
0.12
2-
0.080.06 a)
co
I
0.04 oCD Q.
CO
0.02
100 450 500 550 600
Wavelength
(nm)
Figure4.9- Filteredand unfilteredTerraPixspectral sensitivities after
usingtheWratten81.
This combination's performance can be further explained
by
looking
at thetransformation matrix that was used to convert the digital counts of an image to the
coefficientstobeused withtheeigenvectorstoreconstructthespectral reflectance. Table
Table 4.6- Matrix for Wratten 81
andNo FilterCombination.
Camera Channel
R1 R2 G1 G2 B1 B2
Coefficients
1 -12.01 12.21 143.65 -123.11 10.81 -10.28
2 129.64 -116.10 -115.57 102.58 -246.16 220.30
3 163.70 -145.28 132.79 -118.82 -215.57 188.43
4 -398.18 358.61 400.59 -349.84 -381.71 322.87
5 -34.94 34.96 -873.72 753.15 400.66 -337.30
6 180.80 -156.08 -39.73 37.43 -558.21 464.52
Thismatrixis showingthecontribution of each channeltoa particular coefficient. These
matrices work ina noiseless case because it is built offthe average simulated values of
the Esser and blues target. In reality, a group of pixels associated with a particular
reflectance spectrum willhave variance. This particular matrix would thenamplify the
variance andintroduceanincreasedamount of errorintothesystem. For example,the4
coefficient shows that the contributions of the first two channels are multiplied
by
approximately -398.18 and 358.61. If the digital counts from a particular patch
corresponding to these channels varied even
by
a very small amount, the differencewould become greatly amplified. This example can be looked at as an example where
there is a mathematical solutionto the problem with no physical meaning. Figure 4.10
shows plots ofthe transformation matrix coefficients as a function ofwavelength. It
appearsthe transformisverysymmetric aboutthex-axis andiscomposed of a number of
400
100 450 500 550 600
Wavelength
(nm)
650 700
Figure 4.10- Transformationmatrix
resulting fromtheWratten 81and unfiltered combination. Notetheextremely largescale.
A much better choice resulting from this filter selection process would be the
combination ofthe Wratten 40 and Wratten 80A filters. Figures 4.11 and 4.12 show
o
"5
co u.
(D o
c
co
E <n c
co
1
0.9
0.8
0.7
0.6
0.5
0.4
0.3
0.2
0.1
I
WR-40 WR-80A
00 450 500 550 600 650 700
Wavelength
(nm)
0.16
400 450 500 550 600
Wavelength
(nm)
650 700
Figure 4.12- TerraPixCamerasensitivities afterfiltrationwiththeWratten 40and80A filters.
For comparison, the transformation matrix to convert camera signals to eigenvector
coefficientsis shownintable4.7.
Table 4.7- Transformationmatrixfor Wratten 40and80A filters.
Camera Channel
R1 R2 G1 G2 B1 B2
Coefficients
1 1.4936 12.828 -7.4842 14.802 -0.9164 -3.4039
2 0.089341 -6.4197 5.3418 0.74343 -6.2315 29.036
3 5.0673 5.3384 9.4926 -34.009 -15.772 21.536
4 -4.4362 3.5821 -12.897 18.277 -12.911 12.465
5 -22.791 22.761 24.121 -44.337 35.162 -13.831
6 4.4082 5.8228 26.445 -31.974 -50.31 19.202
Thevaluesinthetransformationmatrixaremuch smallersuggestingamore stable matrix
amplified with this transformation matrix and would be more
likely
to perform well inactual
imaging.
Figure 4.13 shows the transformation matrix coefficients. Notice thescale on the y axis is smaller,
indicating
that a difference in pixel values will be lessamplified.
Theoretically,
this transformshouldbemorerobusttonoise.
500 550 600
Wavelength
(nm)
650 700
Figure 4.13- Transformationmatrixcoefficients
resulting fromtheWratten 40and80A combination. The yscaleismuch smallerthanin figure4.10,suggesting less sensitivitytonoise.
Conclusions:
Thenoiseless simulation canbeused as a preselection methodfor filterselection
taken into consideration.
Otherwise,
as shown withtheexample oftheWratten 2C andnofiltercombination, erroneousselectionscanbemade. In any filterselectioncase,it is
Chapter
5
-Modeling
the
Camera
Noise for Simulation:
Purpose:
While a camera with linear photometric response can be modeled as shown in
equation
4.6,
it is only a measure ofthe average signal from the camera and does notincludenoise. A lackofnoise ona perpixelbasiscanleadtofilterselectionsthatdonot
make intuitivesense, as wasshowninthenoiseless case. Thischapterdescribes howthe
noise variance in the TerraPix camera was modeled and applied to the basic camera
equationtosimulatethecamera response
including
noise.The results ofthe noiseless simulation returned several filter combinations that
performsimilarly and made it difficulttoclassifythe filters intermsof performance. It
was also shownthatsome ofthe filtercombinations thatdemonstratedgood performance
did not make intuitive sense. Filters combinations that fell into this category were
usuallycombinations offiltersthatwereverysimilarintheir transmittancepropertiesand
did relatively littletoalterthecamera signalsfromeach other. Itwasdeterminedthat the
addition of noise and a simulation of multiple pixels withtheappropriate noise properties
could be used to create more realistic reflectance estimates and give more physical
meaning to the results ofsimulating the camera's response to different filters foruse in
spectral reflectance estimation.
Also,
the simulationofmanypixels would allowtheuseof adirect pseudo-inverse transformas opposed to the eigenvector analysis used inthe
Noise Sources:
Noiseis defined tobe anyunwanted signalthatcontains no
information,
whichisaddedto the imageroutput (Eastman Kodak
Company
1994). Thefirstmajor source ofnoise comesfromtheCCD imager itself. A CCDcamerahasseveral sources ofinherent
noise that are alldependent onfactors such as
time,
signal, and temperature. The mainsources oftemporalnoiseinaCCD imager include darkcurrent,photon shotnoise, reset
transistor noise, CCD clocking noise, and noise from the output amplifier (Eastman
Kodak
Company
1994). Dark current noise is dependent onthe operating temperatureand the integration time. The dark current noise also varies across the pixels ofthe
imager,
leaving
afixedpatternnoise. The darknoise canbe dealtwithby
taking
adarkimageorthe average of severaldarkimages attheappropriateintegrationtimeandusing
the average pixel referenced data as the zero level for each pixel (Eastman Kodak
Company
1994). Thereset transistornoise and output amplifier noise isgenerally dealtwith
by
using different methodsofsamplingthe signal, butis beyondthe scope ofthisresearch.
Finally,
thephoton shot noise cannotbeeliminated,butcan alsobereducedby
taking
severalimagesandaveragingthedata.The second source of noise comes from the scene illumination. While every
attempt is made to create uniform illumination across the scene, in practice there is
always a certainamountofvariationimposed
by
theunevennessinlighting
and optics ofthe system. Thisnoiseis dealtwith
by
taking
areferenceimageof a uniformtarget,
suchas an even graysurface ofknown reflectance andusing it to flat fieldthe
image,
whichcanbemathematicallydescribedinEq. 5.1.
D-D Dc=("r
\T
)*(PEr.y
-D-.*)<51)
where
Dc
isthecorrecteddata,
Dr
is therawdata,
D^y
is thegraycard,Ddark
isthedarkexposure and
(D^
-Ddark)
denotes
theaveragegrayvalue overthe area oftheuniformgray card. This is a very common method ofreducing the variation in output signal
across ascene andis easily done inacontrolled environment.
Experimental:
Equation 4.6 gives the noiseless camera model in terms of a relative, average
signal. Theequationisnow changedtothe
following
form:d
=ptJ]pWr(X)sliWfWAA4n(5.2)
x
wheretistheintegration
time,
pisaconstantthatconvertstheintegratedsignaltodigitalcounts and n is the noise associated with the signal. In the noiseless case, thep and t
termcanbe
ignored,
asthey
are constantsthatare dealtwith inthe transformgeneratedby
theeigenvector analysis. It isnownecessarytoincludethesetermsbecausethenoiseisasignaldependent factorthatisinturndependentuponintegrationtime.
The noise characteristics of the camera were determined from images taken
during
animaging
sessionattheNationalGallery
ofArt,
WashingtonD.C. Atthetime,
theIRcutofffilterwas supplied
by
Pixel Physicsand cutstransmittanceapproximatelyat700 nm. Future simulations withthe model willbe based onthecamerasensitivity and
the Unaxis Balzers UV/IR
blocking
filter that extends transmittance into the near IRwhich 240 patches each of2883 (31 x 31 x
3)
pixels were sampled. These patchesconsisted of236
individual
sample areasmeasuring
1.3 x 1.3 cmandfoursamplesfromthe
large
central square. The first step wastodetermine
the variance characteristics ofthe camera as a
function
of mean signal level. This was doneby
taking
the raw,unfiltered
images
andprocessingthemwiththesoftware providedby
Pixel Physicsusingamodethatreturnedthedatascaledto 16 bitswithno correctionsapplied. Themean and
varianceoftheindividualpatcheswerethenplotted andfitusingtherobustfitQ algorit