2017 2nd International Conference on Wireless Communication and Network Engineering (WCNE 2017) ISBN: 978-1-60595-531-5
Timing and Integer Frequency Offset Estimation for DLMT System over
Time-Varying Rayleigh Fading Channel
Kui XU, Meng WANG and Dong-mei ZHANG
PLA Army Engineering University, Nanjing 210007, ChinaKeywords: DLMT system, Time-Varying channel, Time and frequency synchronization.
Abstract. In this paper, we study the timing and integer carrier frequency offset (ICFO) estimation problem for dynamic lattice multicarrier transmission (DLMT) system over time-varying Rayleigh fading channel. Firstly, a novel preamble structure based on two constant amplitude zero auto-correlation (CAZAC) sequences is designed for DLMT system. Then, by using the designed dual-CAZAC preamble, a discrete cross ambiguity function (DCAF) based timing and ICFO estimation algorithm is proposed. Simulation results show that the proposed DCAF based timing and ICFO estimation algorithm can mitigate the impact of time-varying multipath Rayleigh fading channel and outperforms traditional estimators on the correct estimation probability performance.
Introduction
The time variations of the channel during one orthogonal frequency division multiplexing (OFDM) symbol duration destroy the orthogonality of different subcarriers, known as inter-carrier interference (ICI). In order to overcome the ICI of OFDM system, several pulse-shaping multi-carrier modulation (MCM) systems were proposed [1–8]. The pulses in these systems have faster spectral decay and lower sidelobes. Therefore, the pulse-shaping MCM systems are more robust to the carrier frequency offset (CFO) and frequency dispersion.
It is shown that signal transmission through a rectangular lattice is suboptimal for doubly dispersive (DD) channel [9–10]. Multi-carrier transmission on hexagonal time-frequency lattice with adaptive lattice parameters and prototype pulse is named as dynamic lattice multi-carrier transmission (DLMT) system. In [11], the authors show that the DLMT system outperforms OFDM system on the SINR performance.
The work in [12] in particular provides a nice overview of methods and uses for computing the cross-ambiguity function (CAF). The works in [13-15] use the CAF to perform partial or full OFDM synchronization. The authors in [14] propose an integer carrier frequency offset (ICFO) estimation algorithm for OFDM systems with residual timing offset (TO) over frequency selective fading channel. The work in [13] utilizes the cyclostationary autocorrelation function to estimate the second order statistical parameters of the received OFDM symbols. The authors in [15] propose a TO estimation algorithm for MIMO-OFDM system with distributed antenna.
In this paper, we study the TO and ICFO estimation problem for DLMT system over time-varying Rayleigh fading channel. Firstly, a novel preamble structure based on two constant amplitude zero auto-correlation (CAZAC) sequences is designed for DLMT system. Then, by using the designed dual-CAZAC preamble, a DCAF based TO and ICFO estimation algorithm is proposed.
DLMT System Model
Let =
( )
0( )
1(
L 1)
ψ
ψ ψ ψ
−
Ψ , ,, denote the discrete prototype pulse with length L
ψ, Lψ >M ,
and M denotes the symbol period. We assume that there are total K DLMT symbols, the transmitted
( )
( )
( )
2 1 2 1
,2 ,2 ,2 1 ,2 1
1 0 1 0
L L
K K
k l k l k l k l
k l k l
x n X ψ n X ψ n
− −
+ +
= = = =
=
∑ ∑
+∑ ∑
(1)where k,2l
( )
n(
n kM e)
j n l L2π
ψ =ψ − , ,2 1
( )
(
2)
(2 1)j n l L
k l n n kM M e
π
ψ + =ψ − − + .
The transmitted discrete signal can be expressed in matrix form as
[
M 1, , kM k, , KM K]
K= Ξ Ξ Ξ
x x x x 1 (2) where 1K denotes the K×1 all-one vector. Delay matrix ΞkM can be expressed as
( ) ( )
2 2
2
1 , ,
T
L M L M
kM k M L M K k M
ψ ψ
ψ
+ +
+
− −
Ξ =0 I 0 , and 0ij denotes the j×i all-zero matrix and L M2
ψ+
I is the
2
L M
ψ + identity matrix. The kth transmit time domain signal vector xk can be expressed as
(
H k)
(
H k)
k = e e e + o o o
x Ψ F X Ψ F X (3)
where Xke =Xk,0,Xk,2,,Xk,2L−2T and ,1, ,3, , ,2 1 T k
o =Xk Xk Xk L−
X denote the transmitted data
symbol vector corresponding to the even subcarriers and odd subcarriers of the kth frequency domain
DLMT symbol, respectively. Xk l, denotes the data symbol transmitted on the lattice point (k, l), i.e.,
kth symbol and lth subcarrier, and is assumed to be independent and identically distributed (i.i.d.)
with zero mean and average power σX2 ; k∈K and l∈L are the position indices in the T-F plane; K
and L denote the sets from which k, l can be taken, with cardinality K and L, respectively. FeH and
H o
F are two
(
L M 2)
Lψ + × matrices resulting from cyclically extending the rows of a 2L×2L IDFT
matrix F2HL and extract only L even columns and odd columns, respectively.
(
)
12
,
T T T
e M
=
Ψ Ψ 0 ,
(
1)
2 ,
T T
T
o M
=
Ψ 0 Ψ . AB denotes the Hadamard product of matrices A and B with
(
AB)
i j, =( ) ( )
A i j, B i j, . The received baseband signal can be expressed as= +
r hx w (4) where w denotes the vector of noise samples and h denotes the Lx×Lx time-varying channel matrix,
(
)
(
2 1)
x
L L M K M
ψ
= + + − , and h can be expressed as
1 2
1 1 1
1 2
2 2 2
1 2
0 0
0 0
0 0 0
h h
h
L
L
L
n n n
h h h
h h h
h h h
=
h
(5)
where lh
n
h denotes the time-varying impulse response of the lh-th path at time n. Since the delay
matrix ΞkM satisfies
2
2 2
,
,
L M
T
iM jM L M
L M
i j
i j
ψ ψ ψ
+ + +
=
Ξ Ξ =
≠
I
0 (6)
'
' '
' 1 ' K
T T T T
k kM kM kM k kM k M k kM
k AWGN
Signal k k
ISI
= ≠
= Ξ = Ξ Ξ + Ξ
∑
Ξ + Ξx r h x h x w (7)
The recovered even subcarriers and odd subcarriers of the kth frequency domain DLMT symbol can
be expressed as
(
')
ˆk
e e e k
∗ ∗
=
X F Ψ x (8) and
(
')
ˆk
o o o k
∗ ∗
=
X F Ψ x (9)
respectively.
( )
⋅ ∗ denotes the complex conjugate operation.Proposed Dual-CAZAC Preamble Structure
The proposed preamble is composed of two CAZAC sequences Q1 and Q2 in the frequency domain.
( )
0 ,( )
1 , ,(
1)
T
i=qi qi qi LQ−
Q , i∈
{ }
1, 2 ,( )
exp(
2)
i i Q
q n = j r nπ L , 0,1, , 1
Q
n= L − ,
2
Q
L =L denotes the length of training sequence. These two CAZAC sequences have different
parameters r1 and r2. The designed training sequence q
( ) ( )
0 ,q 1 , ,q L(
M 2 1)
ψ
= + −
q in the
time domain can be expressed as
(
1)
(
2)
H H
e e o o
= +
q Ψ F Q Ψ F Q (10) The transmitted discrete signal including the time domain training sequence can be expressed as
[
, 2 2, , , ,]
q= ΞM Ξ M ΞkM k ΞKM K K
x q x x x 1 (11)
DCAF Based Timing and Integer CFO Estimation Algorithm
The received signal with CFO can be expressed as
(
)
f f q
∆ = ∆ +
r Θ hx w (12)
where Θ
(
∆f)
=diag{
1, exp(
j2π∆f)
,, exp(
j2π(
Lx−1)
∆f)
}
denotes the CFO matrix and ∆f denotes the normalized CFO. Hence, the received training sequence with TO ∆t can be expressed as(
)
(
)
(
(
)
)
, T T
t f t t
q M f M f q
∆ ∆ ∆ ∆
∆
= Ξ = Ξ ∆ +
r r Θ hx w (13)
where
(
t)
T L M2, 2, (L 1M) 2M t L M K M t
ψ ψ
ψ
+ +
∆
∆ + − −∆
Ξ =0 I 0 .
Discrete Ambiguity Function and DCAF
Let z1=z1
( )
0 ,z1( )
1 ,,z1(
N−1)
and z2=z2( )
0 ,z2( )
1 ,,z2(
N−1)
denote two discrete sequences with length N. The discrete ambiguity function of sequence1
z can be expressed as
(
)
( ) (
)
(
( )
)
( )
1 2
2
, 1 1 1 1
0
,
j n
N
H N
n
z n z n e
πυ
τ
τ υ ∗ τ − υ
=
=
∑
− = ϒz z z z
where ϒ
( )
υ =1, exp(
−j2πυ N)
,, exp(
−j2πυ(
N−1)
N)
and(
)
(
)
(
)
1 z1 ,z1 1 , ,z1 N 1
τ
τ τ τ
= − − − −
z . The DCAF between two sequences z1 and z2 with length
N is defined as follows [15]:
(
)
( ) (
)
(
( )
)
( )
1 2
2
, 1 2 1 2
0 , j n N H N n
z n z n e
πυ
τ
τ υ ∗ τ − υ
=
=
∑
− = ϒz z z z
C (15)
where τ2 z2
(
)
,z2(
1)
, ,z2(
N 1)
τ τ τ
= − − − −
z .
As indicated in (32), DCAF is a two-dimensional correlation function that shows the response of a waveform z1 to the signal z2 with time delay
τ
and CFOυ
. Hence,(
)
1, 2 τ υ', '
z z
C reaches its peak
while the pair of waveforms z1 and z2 are with the highest degree of similarity for a combined time
and frequency shift
(
τ υ
', ')
. The DCAF between the received training sequence qt, f∆ ∆
r and the transmitted training sequence q can be expressed as
(
)
(
( )
)
(
)
(
)
(
(
)
)
,
,
,qt f ,
H T
t f t
q M f q w
τ τ
τ υ υ τ
∆ ∆
∗ ∆ − ∆ ∆ −
= ϒ = Ξ ∆ − +
q r q r q Θ hx
C (16)
where w =q wT ' and ' T ∗
(
( )
υ)
T= ϒ
w q w . Substitute (11) into (16), we can obtain
(
)
(
)
(
)
,
,qt f , '
T t
M f M w
τ
τ υ υ
∆ ∆
∆ − ∗ ∗
= Ξ − ∆ Ξ +
q r q Θ h q
C (17)
where w' denotes the effects of ISI and AWGN on the DCAF. Firstly, if we assume ∆ =f υ and the
channel is AWGN channel, then Θ
(
υ
− ∆f)
=ILx and h=ILx, hence, hence (17) can be simplified as(
)
(
)
,
,qt f , '
T
T t
M M
f τ w
τ
∆ ∆
∆ − ∗
∆ = Ξ Ξ +
q r q q
C (18)
Since
(
)
2T t
M M L M
ψ
τ ∆ −
+
Ξ Ξ =I when ∆ =t τ , otherwise,
(
)
( )( )
2
y
y
L M t
L t
T t
M M
t t L
ψ τ τ τ τ τ + −∆ + × ∆ − ∆ − ∆ − ∆ − ×
Ξ Ξ =
0 I
0 0 (19)
where Ly =Lψ +M 2− ∆ +t τ. Hence, , t,f
(
,)
q∆ ∆ τ υ q rC reaches its peak while
(
∆ ∆t, f) (
=τ υ
,)
. Let(
τ υ
,)
=
Ψ , the TO ∆t and CFO ∆f estimation scheme over AWGN channel can be expressed as
(
)
,,
ˆ arg max ,
t f q∆ ∆ τ υ
= q r
Ψ
Ψ
C (20)
In order to reduce the computational complexity, υ is chosen as
υ
≤ NF and NF <L 2 denotesthe maximum normalized CFO. But for time-varying Rayleigh fading channel, h is a time-varying convolution matrix, and we have
(
)
(
)
(
)
(
(
)
)
,
,qt f , ' '
T
T t T
M f M w tr t f t w
τ
τ τ
τ υ υ υ
∆ ∆
∆ − ∗ ∗ ∗ ∗
∆ − ∆ −
= Ξ − ∆ Ξ + = − ∆ +
q r q Θ h q Θ h q q
C (21)
where Θ∆ −t τ
(
υ
− ∆f)
is a(
Lψ +M 2) (
× Lψ +M 2)
submatrix of Θ(
υ
− ∆f)
with columns rangefrom ∆ − +t τ 1 to t L M 2
ψ
τ
∆ − + + and rows range from ∆ − +t τ 1 to t L M 2
ψ
τ
∆ − + + . h∆ −t τ is a
(
L M 2) (
L M 2)
1
t τ
∆ − + to ∆ − +t τ Lψ +M 2. From equation (21) we can see that in the DCAF based metric
function the TO ∆t is coupled with CFO ∆f, which makes the time and frequency synchronization
problem more complicated. Thus, it is of great interest to find new metric to decouple the problem.
Timing Offset Estimation
Since, matrix q q∗ T is a Hermite positive semidefinite matrix, that is for any non-zero
(
L M 2)
1ψ + ×
column vector z we have H ∗ T T 2 0
= ≥
z q q z q z . Based on the trace inequality of product of matrices,
we have
(
)
(
)
1(
)
T T
t t
tr f tr
τ υ τ σ
∗ ∗ ∗
∆ − − ∆ ∆ − ≤
Θ h q q q q (22)
where σ1 denotes the maximum singular value of matrix t τ
(
υ
f)
t τ∗ ∆ − − ∆ ∆ −
Θ h .
It is obvious that the matrix Θ∆ −t τ
(
υ
− ∆f)
is a diagonal matrix and t(
f)
L M 2ψ
τ υ
∆ − − ∆ = +
Θ I . t τ
∗ ∆ −
h
is a strictly upper triangular matrix. Specifically, tτ
∗ ∆ −
h is an upper triangular matrix when ∆ =t τ .
Hence, we find that the nonzero element of matrix tτ
∗ ∆ −
h , ∆ ≠t τ is a submatrix of t
τ ∗ ∆ −
h , ∆ =t τ .
Based on the Corollary given in [16] (Eq. 3.1.3), we get that the singular value of the matrix ,
t τ t τ
∗ ∆ −
= ∆ =
A h is greater than that of the submatrix r tτ, t τ
∗ ∆ −
= ∆ =
A h , that is
σ
1( )
A ≥σ
1(
Ar)
.We assume that the singular value decomposition of matrix t τ
∗ ∆ −
h can be expressed as
H t τ
∗ ∆ − =
h UΣV , hence t
(
f)
t t(
f)
Hτ
υ
τ τυ
∗
∆ − − ∆ ∆ − = ∆ − − ∆
Θ h UΘ ΣV . Since if
(
(
)
)
, 0
t τ υ f i j
∆ − − ∆ ≠
Θ ,
we have
(
)
, 1
t τ i j
∆ − =
Θ , then the maximum singular value of matrix t
(
f)
tτ
υ
τ∗ ∆ − ∆ −
= − ∆
B Θ h ,
( )
1
σ
Bequals to that of the matrix t τ
∗ ∆ −
h , that is σ1
( )
B =σ1( )
A ≥σ1(
Ar)
.From the above analysis, the inequality (22) can be rewritten as
(
)
(
)
1( )
(
)
1( )
T T T
t t
tr f tr
τ υ τ σ σ
∗ ∗ ∗ ∗
∆ − − ∆ ∆ − ≤ =
Θ h q q A q q A q q (23)
where T ∗
q q can be expressed as
(
)
(
)
(
)
(
(
)
(
)
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
1 2 1 2
1 1 1 2
2 1 2 2
T
T H H H H
e e o o e e o o
T T T T
e e e e e e o o
T T T T
o o e e o o o o
diag diag diag diag
diag diag diag diag
∗ ∗ ∗ ∗ ∗ ∗ ∗ ∗ ∗ ∗ ∗ ∗ ∗ ∗ = + + = + + +
q q Ψ F Q Ψ F Q Ψ F Q Ψ F Q
Q F Ψ Ψ F Q Q F Ψ Ψ F Q
Q F Ψ Ψ F Q Q F Ψ Ψ F Q
(24)
Since ediag
(
e)
diag(
e)
eT odiag(
o)
diag(
o)
oT 2 L∗ ∗
∗ ∗ ∗
= =
F Ψ Ψ F F Ψ Ψ F Q I and
(
)
(
)
(
)
(
)
1 2 2 1
T T T T
ediag e diag o o odiag o diag e e L
∗ ∗
∗ ∗ ∗ ∗
= =
Q F Ψ Ψ F Q Q F Ψ Ψ F Q 0 , we can obtain that
2 2
1 1 2 2 1 2
T ∗ T ∗ T ∗
= + = +
q q Q Q Q Q Q Q , where ⋅ denotes the Euclidean norm. Hence, , t,f
(
,)
q∆ ∆ τ υ q rC
reaches its peak while ∆ =t τ regardless of the value of ∆f. We decouple the timing metric from the
joint timing and frequency metric function (21). If we set υ=υ0 and the timing metric can be expressed as
(
)
, 0,
arg max t f , q
t
τ ∆ ∆ τ υ
(
)
,,
arg max t f , q t τ υ τ υ ∆ ∆ ∈
∆ =
∑
q rΩ
C (26)
where Ω is the set of preset possible frequency offsets. For example, Ω can be set as
{
υ
max,υ
maxυ υ
, max 2υ
, ,υ
max}
= − − + ∆ − + ∆
Ω , and the number of elements in the set Ω is Nυ.
Integer Carrier Frequency Offset Estimation
When we fix the residual time offset as ∆ − =t τ τ0, and the equation (21) can be rewritten
(
)
(
)
,
0 0 0
, f 0, '
q
T
f w
τ ∆ υ τ υ τ
∗ ∗
= − ∆ +
q r q Θ h q
C (27)
Since
(
)
0
f
τ υ− ∆
Θ is a diagonal matrix, (26) can be rewritten as
(
)
(
)
,
0 0 0
,q f 0, '
T
f w
τ ∆ υ τ τ υ
∗ ∗
= − ∆ +
q r q h Θ q
C (28)
where
(
)
0
f
τ υ
∗
− ∆
Θ q expressed as
(
)
(
)
(
(
)
(
)
)
{ }
(
)
{
}
(
)
(
)
0 0 0 0 1 2, 1 , 2
ˆ ˆ
H H
e e o o
H H
e e o o
f f
diag f diag f
τ τ τ τ υ υ υ υ ∗ ∗ ∗ − ∆ = − ∆ + = ∆ − + ∆ −
Θ q Θ Ψ F Q Ψ F Q
Ψ F Q Ψ F Q
(29)
where
(
)
(
)
0 0
,
ˆH H
eτ ∆ −f υ = τ υ− ∆f e
F Θ F and
(
)
(
)
0 0
,
ˆH H
oτ ∆ −f υ = τ υ− ∆f o
F Θ F . We have
(
)
{ }
{ }
(
)
{ }
{
}
(
)
{
}
{
}
(
)
{
}
{
}
(
)
,
0 0 0 0 0
0 0 0 0
1 , 1 1 , 2
,
2 , 1 2 , 2
ˆ ˆ
0,
ˆ ˆ
f q
T H T H e e e e e e o o T H T H
o o e e o o o o
diag diag f diag diag f
diag diag f diag diag f
τ τ τ τ τ
τ τ τ τ
υ υ υ
υ υ ∆ ∗ ∗ ∗ ∗ ∗ ∗ ∗ ∗ ∗ ∗ ∗ ∗ ∗ ∗ ∗ ∗ ∗ ∗ ∗ ∗ = ∆ − + ∆ − + ∆ − + ∆ −
q r Q F Ψ h Ψ F Q Q F Ψ h Ψ F Q
Q F Ψ h Ψ F Q Q F Ψ h Ψ F Q
C
(30)
If ∆ =f υ, , 0,f
(
0,)
qτ ∆ υ
q r
C reaches its peak, then the ICFO can be obtained by
(
)
, 0,
arg max f 0, q
f
τ
υ ∆ υ
∆ = Cq r (31) To improve the robustness of ICFO synchronization, we can change the metric as
(
)
,0
, '
arg max f ',
q f τ υ τ τ υ ∆ ∈
∆ =
∑
q rΓ
C (32)
where Γ is the set of preset possible TOs. For example, Γ can be set as
{
0 1, 0 2, , 0 N}
τ
τ τ τ τ τ τ
= + + +
Γ . Hence, the number of elements in the set Γ is N
τ .
Simulation Results
In this section, we test the proposed DCAF based timing and ICFO estimation approach for DLMT system via computer simulations based on the discrete signal model. In the following simulations, the number of subcarriers for DLMT system is N = 40, and the length of prototype pulse is Lψ = 600. The
center carrier frequency is Fc = 5GHz and the sampling interval is set to Ts= 10−6s. The system parameters of DLMT system are F = 25kHz and T = 1 × 10−4. WSSUS channel is chosen as DD channel with exponential power delay profile and U-shape Doppler spectrum. The maximum multipath delay spread is set to 17×10−6s.
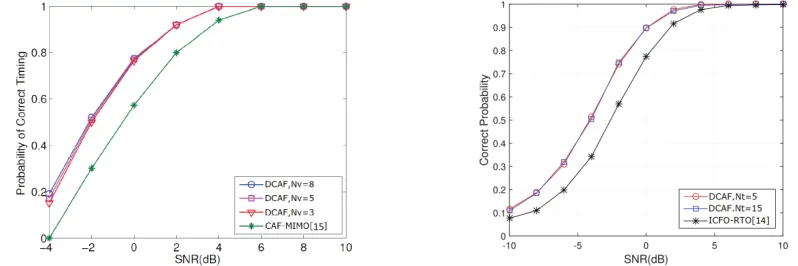
The probability of correct TO estimation achieved by the proposed DCAF based TO estimator at speed v = 300 km/h is given in Figure 1. The proposed algorithm is compared with the TO
than 4 dB and the performance increases with the increasing of the number of weighted factors Nυ.
Moreover, the DCAF-based algorithm is significantly better than CAF-MIMO [15] scheme.
The correct estimation probability of the proposed DCAF based ICFO estimator at speed v =
300km/h is given in Figure 2. We can see that the proposed DCAF based integer CFO estimator can obtain reliable estimation performance when SNR is greater than 4 dB and the performance increases with the increasing of the number of weighted factors Nτ. Simulation results show that, the
DCAF-based algorithm is significantly better than ICFO-RTO scheme [14].
[image:7.612.105.504.160.293.2]
Figure 1. Correct TO estimation probability at v=300km/h. Figure 2. Correct ICFO estimation probability at v=300km/h.
Conclusion
In this paper, we study the ICFO estimation problem for DLMT system over time-varying Rayleigh fading channel. Firstly, a dual-CAZAC preamble structure is designed for DLMT system. Then, by using the designed dual-CAZAC preamble, a DCAF based timing and ICFO estimation algorithm is proposed. Simulation results show that the proposed DCAF based estimator outperforms traditional estimator on the correct estimation probability performance.
Acknowledgement
This work is supported by National Natural Science Foundation of China (No. 61671472), Jiangsu Province Natural Science Foundation (BK20160079).
References
[1] Farhang-Boroujeny, B., OFDM Versus Filter Bank Multicarrier, IEEE Signal Processing Magazine, vol. 28, no. 3, pp. 92-112, May 2011.
[2] Kumbasar V., Kucur O., ICI reduction in OFDM systems by using improved sinc power pulse, Digital Signal Processing, vol. 17, no. 6, pp. 997-1006, Nov. 2007.
[3] Das S., Schniter P., Max-SINR ISI/ICI-Shaping multicarrier communication over the doubly dispersive channel, IEEE Trans. on Signal Processing, vol. 55, no.12, pp. 5782-5795, Dec. 2007.
[4] Abbas H.K., Waleed A. M., Nihad S., The performance of multiwavelets based OFDM system under different channel conditions, Digital Signal Processing, vol. 20, no. 2, pp. 472-482, Mar. 2010.
[5] Gao X., Wang W., Xia X.G., et al., Cyclic prefixed OQAM-OFDM and its application to single-carrier FDMA, IEEE Trans. on Communications, vol. 59, no. 5, pp. 1467-1480, May 2011.
[6] P. Jung, G. Wunder, The WSSUS pulse design problem in multicarrier transmission, IEEE Trans. on Communications, vol.55, no. 10, pp.1918-1928, Oct. 2007.
[8] M. Ma, B. Jiao, C. Y. Lee, A dual-window technique for enhancing robustness of OFDM against frequency offset, IEEE Communications Letters, vol. 12, no. 1, pp. 17-19, Jan. 2008.
[9] K. Xu, Y. Xu, et. al., Time and Frequency Synchronization for Multicarrier Transmission on Hexagonal Time-Frequency Lattice, IEEE Trans. Signal Proc., vol. 61, no. 24, pp. 6204-6219, 2013.
[10] Xu K., Xu Y., Zhang D., Ma W., On Max-SINR receiver for HMT over doubly dispersive channel, IEEE Trans. on Vehicular Technology, vol. 62, no. 5, pp. 2381-2387, Jun. 2013.
[11] Xu K., Shen Y. H., Effects of carrier frequency offset, timing offset, and channel spread factor on the performance of hexagonal multicarrier modulation systems, EURASIP Journal on Wireless Communications and Networking, vol. 2009, pp. 1-8, Jan. 2009.
[12] C. Yatrakis, Computing the Cross Ambiguity Function A Review, Masters thesis, Binghamton University, State University of New York, 2005.
[13] H. Bolcskei, Blind Estimation of Symbol Timing and Carrier Frequency Offset in Wireless OFDM Systems, IEEE Transactions on Communications, vol. 49, no. 6, pp. 988C999, June 2001.
[14] Danping Li, Yongzhao Li, Hailin Zhang, Cimini, L.J., Yuguang Fang, Integer Frequency Offset Estimation for OFDM Systems With Residual Timing Offset Over Frequency Selective Fading Channels, IEEE Trans. on Vehicular Technology, vol. 61, no. 6, pp. 2848-2853, July 2012.
[15] Kui Xu, Yuehong Shen, Timing synchronization using cross ambiguity function for MIMO-OFDM systems with distributed antennas, Int. J. Electron. Commun., vol. 64, no. 1, pp. 82-86, 2010.